注:要视频学习可以去B站搜索“DR_CAN”讲解的卡尔曼滤波器,深有体会!
一、为啥需要卡尔曼滤波器

卡尔曼滤波器在生活中应用广泛,因为在我们生活中存在着不确定性,当我去描述一个系统,这个不确定性就包涵一下三点:
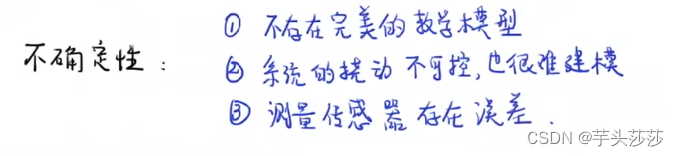
所以要解决正样的问题,卡尔曼就诞生了。
1、下面我们进入公式推导,我们测量一个物品时,会存在测量读取误差以及测量工具误差,这时候我们正常采用多次测量取平均值来得出最终结果,那么下面我们就进行公式表达

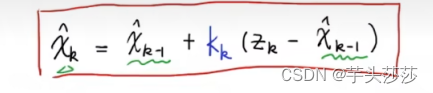
经过上述公式转换推导,是不是就出来了一个我们卡尔曼滤波器结果公式,其表达意思如下:
(1)既当前最优结果 = 上一次最优结果 + 卡尔曼增益*(此次测量值 - 上一次最优结果)
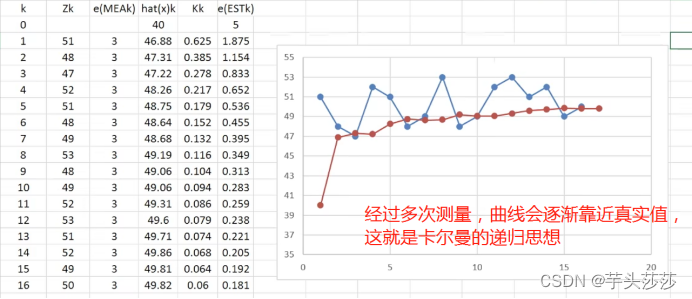
(2)随着测量次数的增加,当前次的测量结果就不那么重要了,反之测量次数比较少,那么当前次的结果作用就比较大。
(3)从公式也可以看出来,新的这一次X^k与上一次的估计值X^k-1有关,然后上一次的估计值X^k-1与上上次的有关,这就是一种递归思想。
(4)这也就是卡尔曼滤波器的优势,它不需要追溯很久以前的数据,只需要上一次的即可。
2、卡尔曼增益k
k在这里先做简单的解释,首先引入两个参数:
估计误差与测量误差,就是它们两个与真实值得差值

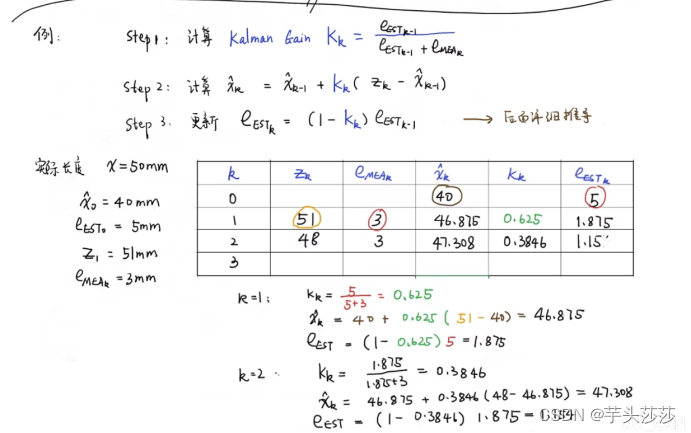
那么Kk的表达式:这里不做推导,这个公式是卡尔曼滤波器的核心公式

那么到这里,增益已经知道,我们把第一步的公式拿下来,合并起来

是不是就可以转换成如下:
3、估计误差与测量误差怎么确定参数?
估计上一次的误差同时初始化是为 kfp.Last_P = 1;切记不可为0
测量误差:这个取决于传感器的精度,如果你的传感很贵精度很厉害那这个测量误差你可以取0.1等,可以实际调试看看最终结果。
4、根据上面理解与公式,我们来做一维的滤波处理
eg:
 如果用程序表达
如果用程序表达
typedef struct
{
float Last_P;//上次估算协方差 不可以为0 ! ! ! ! !
float estout ;//卡尔曼滤波器输出
float Kg;//卡尔曼增益
float R;//(测量)观测噪声协方差
}Kalman;
Kalman kfp;
void Kalman_Init(void)
{
kfp.Last_P = 5;
kfp.estout = 40;
kfp.Kg = 0;
kfp.R = 3;//这个取决于传感器的精度
}
Void KalmanPro(float kfpMeak)
{
kfp.Kg = kfp.Last_P / (kfp.Last_P + kfp.R );
kfp.estout = kfp.estout + kfp.Kg(kfpMeak - kfp.estout);
kfp.Last_P = (1- kfp.Kg)*kfp.Last_P;
}



![[架构之路-215]- 系统分析-领域建模基本概念](https://img-blog.csdnimg.cn/img_convert/4c9251dceb3ff67823831f80be8921a6.jpeg)

![[保姆教程] Windows平台OpenCV以及它的Golang实现gocv安装与测试(亲测通过)](https://img-blog.csdnimg.cn/338ac4274be643d7ab98fe35a954cfa8.jpeg#pic_center)

![学习open62541 --- [78] 单线程和多线程的使用场景](https://img-blog.csdnimg.cn/c6d27177476b468f9048358ab74bd52a.png)