文章开始先扯一堆废话,lio-sam作者手推平面点和角点匹配,对于初学者,尤其数学不好者学习有一定难度,对于工程落地和后期优化而言难度较大。本文基于主流优化库实现角点匹配,以下内容均为原创和作者实测干货(ps:作者有着N年slam工作经验)
补充:作者不善于排版,但内容均为干货
文章开头首先介绍下什么是lio-sam中的角点,千言万语不如直接上图直观
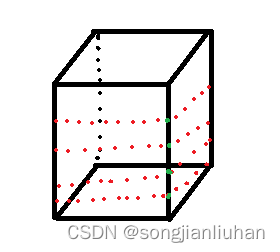
如上图对于一个立方体物体,多线激光雷达打在该立方体上的点云如上述红色和绿色点云。
图中绿色的点为角点
什么意思呢?就是激光雷达的点云在物体的棱角上的点就是角点,红色的点为平面点
干货来了类似于pl-icp,角点匹配为点到线的距离
首先
点代表 当前激光雷达帧中提取出来的角点
线代表 图中绿色点构成的棱角线
以上为开篇点题,网上有很多大佬介绍算法的,本文指在用ceres实现匹配,替代手推公式匹配。废话不多说上代码。
使用ceres记住一句话就可以,我的残差是个啥?****
交点匹配的目的是让当前激光雷达帧中提取出来的角点到所对应角点构成线的距离最小
残差就是这个距离,距离最小也就是解最小二乘问题
首先先把头文件干上
#include <memory>
#include <vector>
#include <opencv2/opencv.hpp>
#include "Eigen/Core"
#include "ceres/ceres.h"
#include "ceres/jet.h"
#include "ceres/rotation.h"
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/kdtree/kdtree_flann.h>
角点残差,代码一多就容易晕乎哈,所有文字解释均在代码中
//角点残差
class CornerPointsCostFunctor{
public:
//scaling_factor表示权重,简单理解就是比如我这个点的擦差是1,如果权重是2,乘以残差就表示把我这个残差放大,也就是说我更加相信这个点,优化的时候我就要使劲优化它
//source_cloud表示当前帧中的角点点云
//target_cloud表示我的local map中的角点点云
CornerPointsCostFunctor(const double scaling_factor, const pcl::PointCloud<PointType>::ConstPtr source_cloud,
const pcl::PointCloud<PointType>::ConstPtr target_cloud/*注意目标角点个数不能小于5个*/)
: scaling_factor_(scaling_factor), source_cloud_(source_cloud), target_cloud_(target_cloud){
//构建target_cloud kd_tree, 把localmap创建为kd-tree,目的先透露一下,为了找线,就要搜索对应角点,为了减少搜索的计算量
kdtree_target_cloud_.reset(new pcl::KdTreeFLANN<PointType>());
kdtree_target_cloud_->setInputCloud(target_cloud_);
// LOG(INFO) << "source_cloud: " << source_cloud_->points.size();
}
//禁止拷问构造
CornerPointsCostFunctor(const CornerPointsCostFunctor&) = delete;
//禁止赋值构造
CornerPointsCostFunctor& operator= (const CornerPointsCostFunctor&) = delete;
//这位一个函数模板,ceres中格式固定哈,函数的形参可以按照我们想要的设计,这里直观解释
//translation描述的是我们需要求解的平移,这里是一个指针,具体类型通常为double 大小为3以此表示我们要求解的x,y,z
//rotation描述的是我们要求解的旋转,这里是一个指针,具体类型通常为double 大小为4以此表示我们要求解的四元素
template <typename T>
bool operator()(const T* const translation, const T* const rotation,
T* const residual) const {
//把平移转化为矩阵形式
const Eigen::Matrix<T, 3, 1> trans = Eigen::Map<const Eigen::Matrix<T, 3, 1>>(translation);
//把旋转转化为矩阵形式
const Eigen::Quaternion<T> qua = Eigen::Quaternion<T>(rotation[0], rotation[1], rotation[2], rotation[3]);
return Evaluate(trans, qua, residual);
}
//这里我们先介绍下思路
//1 首先我们要遍历当前帧的所有角点Ci
//2 我们要依据传入,也就是我们要求解的pose,把Ci转到localmap坐标系下Cwi
//3 由于求解的pose是带先验值的(也就是im预积分的预测值),因此Cwi与在localmap中对应角点距离很近,lio-sam中认为1米以内均为对应,搜索对应5个角点
//4 计算这5个交点的主成分方向,也就是最大特征值对应的特征向量方向(这里通俗解释就是他妈拟合直线)
//5 然后计算点到直线的距离,即为残差
template <typename T>
bool Evaluate(const Eigen::Matrix<T, 3, 1>& trans, const Eigen::Quaternion<T>& qua,
T* const residual) const {
//1 遍历 source_cloud_中所有的角点
for(size_t i = 0; i < source_cloud_->points.size(); i++) {
const Eigen::Matrix<T, 3, 1> point(T(source_cloud_->points[i].x),
T(source_cloud_->points[i].y),
T(source_cloud_->points[i].z));
//角点在世界坐标系下的坐标
Eigen::Matrix<T, 3, 1> corner_point_world = qua * point + trans;
//寻找最近的5个角点
std::vector<int> pointSearchInd;
std::vector<float> pointSearchSqDis;
PointType point_sel;
const Eigen::Vector3f corner_point_worldf = JetTo(corner_point_world[0], corner_point_world[1], corner_point_world[2]);
point_sel.x = corner_point_worldf.x();
point_sel.y = corner_point_worldf.y();
point_sel.z = corner_point_worldf.z();
// LOG(INFO) << "point_sel: " << point_sel.x << ", " << point_sel.y << ", " << point_sel.z;
point_sel.intensity = source_cloud_->points[i].intensity;
kdtree_target_cloud_->nearestKSearch(point_sel, 5, pointSearchInd, pointSearchSqDis); //在附近点云中,找到最近的5个角点
//计算5个点构成的直线
double scaling_factor = scaling_factor_;
//搜索得到相邻的5个点,最远的点距离当前帧的这个角点,不能超过1m
if (pointSearchSqDis[4] >= 1.0) {
scaling_factor = 0; //太远的残差丢弃,权重给到0,最后残差就会为0,不优化
// LOG(INFO) << "error: " << pointSearchSqDis[4];
}
//以下为求解特征值和特征向量
Eigen::Matrix3f matA1 = Eigen::Matrix3f::Zero();
Eigen::Vector3f matD1 = Eigen::Vector3f::Zero();
Eigen::Matrix3f matV1 = Eigen::Matrix3f::Zero();
float cx = 0, cy = 0, cz = 0;
for (int j = 0; j < 5; j++) {
cx += target_cloud_->points[pointSearchInd[j]].x;
cy += target_cloud_->points[pointSearchInd[j]].y;
cz += target_cloud_->points[pointSearchInd[j]].z;
// LOG(INFO) << "neraby points: " << target_cloud_->points[pointSearchInd[j]].x << ", " << target_cloud_->points[pointSearchInd[j]].y << ", " << target_cloud_->points[pointSearchInd[j]].z;
}
cx /= 5; cy /= 5; cz /= 5; //得到5个点的中心点
float a11 = 0, a12 = 0, a13 = 0, a22 = 0, a23 = 0, a33 = 0;
for (int j = 0; j < 5; j++) {
float ax = target_cloud_->points[pointSearchInd[j]].x - cx;
float ay = target_cloud_->points[pointSearchInd[j]].y - cy;
float az = target_cloud_->points[pointSearchInd[j]].z - cz;
a11 += ax * ax; a12 += ax * ay; a13 += ax * az;
a22 += ay * ay; a23 += ay * az; a33 += az * az;
}
a11 /= 5; a12 /= 5; a13 /= 5;
a22 /= 5; a23 /= 5; a33 /= 5;
matA1(0, 0) = a11; matA1(0, 1) = a12; matA1(0, 2) = a13;
matA1(1, 0) = a12; matA1(1, 1) = a22; matA1(1, 2) = a23;
matA1(2, 0) = a13; matA1(2, 1) = a23; matA1(2, 2) = a33;
//这里用loam中的eigen求解,原文用的是我下面注释的opencv求解
//说下差异eigen特征值为从小到大排列,对应特征向量按列存放
//opencv特征值为从大到小排列,对应特征向量按行存放
Eigen::SelfAdjointEigenSolver<Eigen::MatrixXf> solver(matA1);//特征值分解
//特征值
matD1 = solver.eigenvalues(); //特征值,也就是主成分的值
matV1 = solver.eigenvectors(); //特征向量,也就是主成分的向量
// LOG(INFO) << "matD1: " << matD1(0) << ", " << matD1(1) << ", " << matD1(2);
// LOG(INFO) << "mat0: " << matV1(0, 0) << ", " << matV1(0, 1) << ", " << matV1(0, 2);
// LOG(INFO) << "mat1: " << matV1(1, 0) << ", " << matV1(1, 1) << ", " << matV1(1, 2);
// LOG(INFO) << "mat2: " << matV1(2, 0) << ", " << matV1(2, 1) << ", " << matV1(2, 2);
// {
//cv::Mat matA1(3, 3, CV_32F, cv::Scalar::all(0));
//cv::Mat matD1(1, 3, CV_32F, cv::Scalar::all(0));
//cv::Mat matV1(3, 3, CV_32F, cv::Scalar::all(0));
//matA1.at<float>(0, 0) = a11; matA1.at<float>(0, 1) = a12; matA1.at<float>(0, 2) = a13;
//matA1.at<float>(1, 0) = a12; matA1.at<float>(1, 1) = a22; matA1.at<float>(1, 2) = a23;
//matA1.at<float>(2, 0) = a13; matA1.at<float>(2, 1) = a23; matA1.at<float>(2, 2) = a33;
//cv::eigen(matA1, matD1, matV1);
// LOG(INFO) << "111matD: " << matD1.at<float>(0, 0) << ", " << matD1.at<float>(0, 1) << ", " << matD1.at<float>(0, 2);
// LOG(INFO) << "111mat0: " << matV1.at<float>(0, 0) << ", " << matV1.at<float>(0, 1) << ", " <<matV1.at<float>(0, 2);
// LOG(INFO) << "111mat0: " << matV1.at<float>(1, 0) << ", " << matV1.at<float>(1, 1) << ", " <<matV1.at<float>(1, 2);
// LOG(INFO) << "111mat0: " << matV1.at<float>(2, 0) << ", " << matV1.at<float>(2, 1) << ", " <<matV1.at<float>(2, 2);
//}
//第一主成分要特别的大,是第二的三倍以上
//对于这个的理解,就是5个点要在一个直线上,其他的特征值就会很小,不在一个直线上说明不表示对应的是一个棱,看我上面画的丑陋的图
if (matD1(2) <= 3 * matD1(1)) {
scaling_factor = 0;
// LOG(INFO) << "error";
}
T& x0 = corner_point_world[0];
T& y0 = corner_point_world[1];
T& z0 = corner_point_world[2];
//x1和与y1为线上的两个线上的两个点
double x1 = cx + 0.1 * matV1(0, 2); //踩点,也就是将这5个附近角点的中心点,向主成分方向,向←向→进行了小幅度移动,又得到了两个点
double y1 = cy + 0.1 * matV1(1, 2);
double z1 = cz + 0.1 * matV1(2, 2);
// LOG(INFO) << "x1: " << x1 << ", y1: " << y1 << ", z1: " << z1;
double x2 = cx - 0.1 * matV1(0, 2);
double y2 = cy - 0.1 * matV1(1, 2);
double z2 = cz - 0.1 * matV1(2, 2);
// LOG(INFO) << "x2: " << x2 << ", y2: " << y2 << ", z2: " << z2;
//由这两个点,和当前帧的那个角点,构成了了一个△;其中那两个点是底边,而当前帧的那个角点为顶点,其误差项就是顶点开向底边的高h;
T a012 =
ceres::sqrt(((x0 - x1) * (y0 - y2) - (x0 - x2) * (y0 - y1)) * ((x0 - x1) * (y0 - y2) - (x0 - x2) * (y0 - y1)) +
((x0 - x1) * (z0 - z2) - (x0 - x2) * (z0 - z1)) * ((x0 - x1) * (z0 - z2) - (x0 - x2) * (z0 - z1)) +
((y0 - y1) * (z0 - z2) - (y0 - y2) * (z0 - z1)) * ((y0 - y1) * (z0 - z2) - (y0 - y2) * (z0 - z1)));
double l12 = ceres::sqrt((x1 - x2) * (x1 - x2) + (y1 - y2) * (y1 - y2) + (z1 - z2) * (z1 - z2));
T ld2 = a012 / l12; // x0 到(x1,y1),(x2,y2)构成直线的距离
// LOG(INFO) << "ld2: " << ld2;
//文中认为残差大的适当调小权重,这里被我干掉了
// T s = 1. - 0.9 * ceres::abs(ld2); //动态权重,残差越大权重越小
// const double resi = scaling_factor * ld2;
// LOG(INFO) << "s: " << s << ", scaling_factor: " << scaling_factor ;
// LOG(INFO) << "resi: " << resi;
residual[i] = scaling_factor /* s*/ * ld2;//最终残差
if(a012 == T(0.)) {
residual[i] = T(0.);
}
}
return true;
}
private:
const double scaling_factor_;
pcl::PointCloud<PointType>::ConstPtr source_cloud_;
pcl::PointCloud<PointType>::ConstPtr target_cloud_;
pcl::KdTreeFLANN<PointType>::Ptr kdtree_target_cloud_;
};
实现扫描匹配
namespace {
class CeresPose {
public:
CeresPose(
Eigen::Affine3d rigid,
std::unique_ptr<ceres::LocalParameterization> translation_parametrization,
std::unique_ptr<ceres::LocalParameterization> rotation_parametrization,
ceres::Problem* problem);
CeresPose(const CeresPose&) = delete;
CeresPose& operator=(const CeresPose&) = delete;
double* translation() { return translation_.data(); }
double* rotation() { return rotation_.data(); }
public:
std::array<double, 3> translation_;
// Rotation quaternion as (w, x, y, z).
std::array<double, 4> rotation_;
};
CeresPose::CeresPose(
Eigen::Affine3d rigid,
std::unique_ptr<ceres::LocalParameterization> translation_parametrization,
std::unique_ptr<ceres::LocalParameterization> rotation_parametrization,
ceres::Problem* problem)
: translation_({{rigid.translation().x(), rigid.translation().y(),
rigid.translation().z()}})/*,
rotation_({{rigid.rotation().w(), rigid.rotation().x(),
rigid.rotation().y(), rigid.rotation().z()}})*/ {
Eigen::Quaterniond a;
a = rigid.rotation().matrix();
rotation_ = {{a.w(), a.x(), a.y(), a.z()}};
problem->AddParameterBlock(translation_.data(), 3,
translation_parametrization.release());
problem->AddParameterBlock(rotation_.data(), 4,
rotation_parametrization.release());
}
} // namespace
bool Match( Eigen::Affine3d initial_pose_estimate,
pcl::PointCloud<PointType>::ConstPtr source_corner_cloud, pcl::PointCloud<PointType>::ConstPtr target_corner_cloud,
pcl::PointCloud<PointType>::ConstPtr source_surf_cloud, pcl::PointCloud<PointType>::ConstPtr target_surf_cloud,
Eigen::Affine3d * pose_estimate, ceres::Solver::Summary* const summary ) const {
ceres::Problem problem;
CeresPose ceres_pose(
initial_pose_estimate, nullptr /* translation_parameterization */,
//这个必须加上,否则求解为异常
std::unique_ptr<ceres::LocalParameterization>(
std::make_unique<ceres::QuaternionParameterization>()),
&problem);
if(target_corner_cloud->points.size() > 4) {//目标角点的数量要大于4
CHECK_GT(options_.corner_weight, 0.);
// //添加角点loss
problem.AddResidualBlock(
new ceres::AutoDiffCostFunction<CornerPointsCostFunctor,
ceres::DYNAMIC, 3, 4>( //ceres::DYNAMIC表示残差的维度动态求解,维度在哪里呢,!所在位置 3 表示ceres_pose.translation()维度x,y,z 3个数 4表示ceres_pose.rotation()四元素 4个数
new CornerPointsCostFunctor(
//这里描述的是整体权重,每一个点的权重要除以个数
options_.corner_weight /
std::sqrt(static_cast<double>(source_corner_cloud->points.size())),
source_corner_cloud, target_corner_cloud),
source_corner_cloud->points.size()), //!残差维度
nullptr, ceres_pose.translation(), ceres_pose.rotation());
}
ceres::Solver::Options ceres_solver_options;
ceres_solver_options.use_nonmonotonic_steps = false;
ceres_solver_options.max_num_iterations = 20;
ceres_solver_options.num_threads = 2;
ceres_solver_options.linear_solver_type = ceres::DENSE_QR;
ceres::Solve(ceres_solver_options, &problem, summary);
Eigen::Translation3d trans(ceres_pose.translation()[0],
ceres_pose.translation()[1],
ceres_pose.translation()[2]);
Eigen::Quaterniond quater(ceres_pose.rotation()[0],ceres_pose.rotation()[1],
ceres_pose.rotation()[2],ceres_pose.rotation()[3]);
*pose_estimate = trans*quater.toRotationMatrix();
}
未完待续。。。
用ceres实现lio-sam平面点匹配