文章目录
- ROS Packages
- 灵遨科技ROS包的安装
- 安装ROS依赖包
- 导入lingao_ros包到工作空间
- 工作空间的环境source (可选)
- 通讯接口设置
- ROS Package 基本用法
- 使用测试
ROS Packages
lingao_base: 灵遨底盘驱动软件包,用于ROS的底盘通讯收发
lingao_bringup: 灵遨ROS节点启动文件和配置包
lingao_description: 灵遨机器人URDF模型
lingao_msgs: 灵遨自定义消息
imu_calib: 板载imu校准包
灵遨科技ROS包的安装
安装ROS依赖包
sudo apt-get install -y \
ros-$ROS_DISTRO-roslint \
ros-$ROS_DISTRO-tf2 \
ros-$ROS_DISTRO-tf2-ros \
ros-$ROS_DISTRO-robot-localization \
ros-$ROS_DISTRO-imu-filter-madgwick \
ros-$ROS_DISTRO-teleop-twist-keyboard
导入lingao_ros包到工作空间
$ mkdir -p ~/lingao_ws/src/
$ cd ~/lingao_ws/src/
$ catkin_init_workspace
$ git clone https://e.coding.net/keaa/lingaoros/lingao_ros.git
$ catkin_make
工作空间的环境source (可选)
echo "source ~/lingao_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
通讯接口设置
串口驱动可使用我们的udev识别文件或者更改工作包的驱动号从而启动串口通讯
方法一:更改串口号,并且给予串口权限 更改工作包空间串口名,文件所在位置/lingao_ros/lingao_base/launch/lingao_base_driver.launch 将port_name后面串口号/dev/lingao更改为你现在使用的串口号,并且给予串口权限
方法二(推荐):导入lingao设备识别符到系统
$ source ~/lingao_ws/devel/setup.bash
$ roscd lingao_base
$ sudo cp 50-lingao.rules /etc/udev/rules.d/
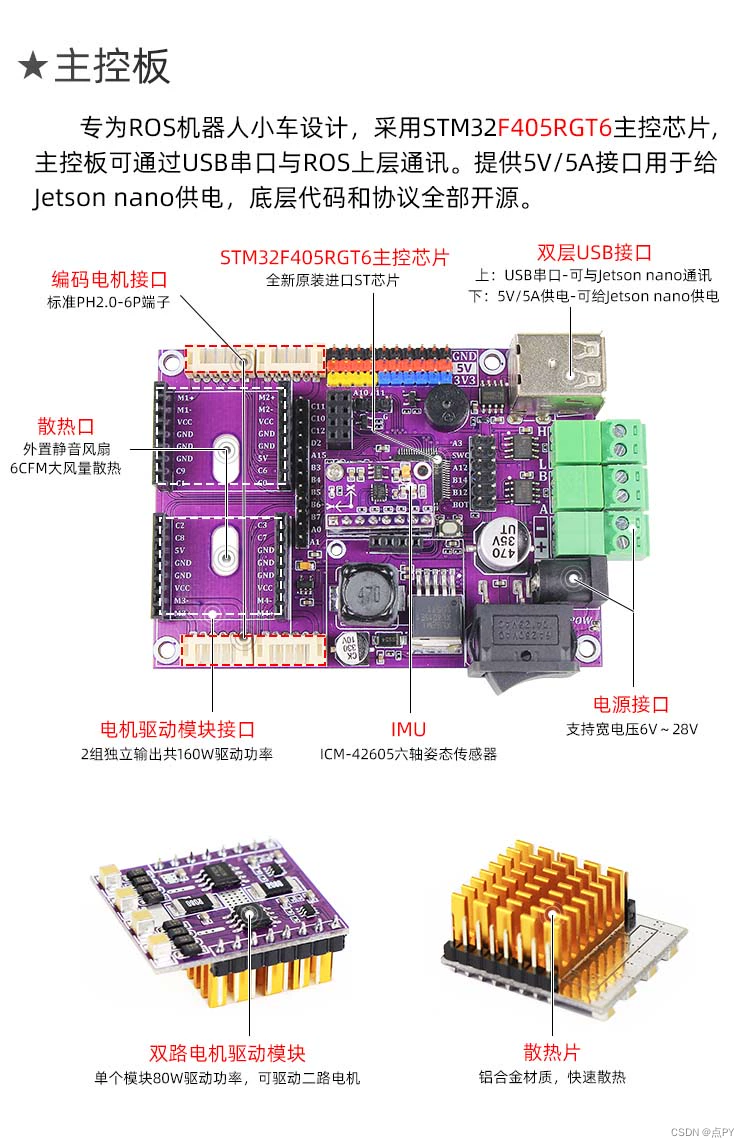
PS:主控板上的USB接口上面是通讯,否则无法与nano通信。
ROS Package 基本用法
下面是lingao_bringup的启动包,有下面几种(未全列出
1单独启动底盘驱动包
roslaunch lingao_base lingao_base_driver.launch
所述 lingao_base/launch/lingao_base_driver.launch 有4个参数:
imu_use: 是否发布imu信息(default: false) pub_odom_tf: 是否发布里程计TF转换(default:
false) linear_scale: 线速度计校准比例(default: 1.0) angular_scale:
角速度计校准比例(default: 1.0) 更多配置可参考lingao_base里的README.md
2启动bringup,IMU信息滤波并且和里程计融合,发布TF坐标
roslaunch lingao_bringup bringup.launch
3启动robot节点,基于bringup基础上启动雷达和载入机器人模型
roslaunch lingao_bringup robot.launch
注意: 需在连接通讯端工控启动,选择以上任意一个运行,退出后可运行另外的包
使用测试
首先运行驱动包
1发布 Twist 消息控制小车运动
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.3, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.0}}'
2使用键盘控制机器人
roslaunch lingao_bringup lingao_teleop_keyboard.launch
现在可通过下面键盘按键移动机器人:
u i o
j k l
m , .
改变速度: q/z : 增加/减少最大速度 10%
w/x : 仅增加/减少 10% 的线速度
e/c : 仅增加/减少 10% 的角速度
安全注意事项:
键盘控制节点默认速度值很高,请确保在开始用键盘控制机器人之前降低速度命令!随时准备好您的遥控器来接管控制。
发布错误的Twist速度消息可能使机器人以最快速度运行,你可以随时准备好您的遥控器来接管控制。












![[MAUI 项目实战] 手势控制音乐播放器: 动画](https://img-blog.csdnimg.cn/img_convert/a2ccb62e66267b667f935ac716ea0286.gif)