用的是VMWare的20.04的Ubuntu虚拟机,打算安装一下Noetic 版本的ROS学习一下。B站有个视频可以参考一下:在Ubuntu20.04上安装ROS机器人操作系统-Noetic但是基本也是参考中文文档安装,步骤相比网上的教程更权威Ubuntu install of ROS Noetic,中文的wiki有点xiaokeng,没有说安装rosdep。
6遇到的问题和解决办法:
1. 清华源用不了的问题:换源
视频使用的清华源发现我用不了,于是我换成了是阿里云。这里找20.04版本的:Ubuntu 镜像
sudo gedit /etc/apt/sources.list
复制进去就行
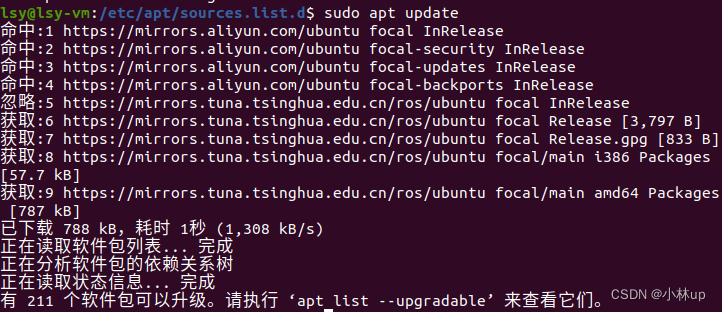
2.sudo apt update出现问题:文件尺寸不符。您使用的镜像正在同步中?
对应中文文档这里

参考文件尺寸不符,您使用的镜像正在同步中?
这里和视频一样用清华源,清华源要用 https 而不是 http,修改ros-lastest.list的http为https。
sudo gedit /etc/apt/sources.list.d/ros-lastest.list
3. rosdep的问题
参考一下ROS安装过程中如何解决 rosdep update 命令出现错误,当然如果能kexue上网可能也可以解决。
4. gazebo 出现:context mismatch in svga_surface_destroy
使用硬件加速:
echo "export SVGA_VGPU10=0" >> ~/.bashrc
跟着视频看看小乌龟是否能跑,rivz和gazebo是否正常,至此安装完毕!
其他安装参考【3的资料给的最全,建议去看!!!】:
- 详细介绍如何在ubuntu20.04中安装ROS系统,超快完成安装(最新版教程)
- 详细介绍如何在ubuntu20.04中安装ROS系统,以及安装过程中出现的常见错误的解决方法,填坑!!!
- ubuntu20.04安装ROS及常见问题
关于ROS的使用,这个博客也很全:
我的ROS入门教程(一)
其他的多看官网教程吧。
刚安装好建议用快照保存一下当前的版本,以后要是有问题可以回退。参考这个文章:VMware虚拟机快照功能



![[MAUI 项目实战] 手势控制音乐播放器: 动画](https://img-blog.csdnimg.cn/img_convert/a2ccb62e66267b667f935ac716ea0286.gif)
![最新[新手入门教程] JDK8u381的下载安装以及环境变量的配置](https://img-blog.csdnimg.cn/480c83f8939c4d1a990e1d2edd08e444.png)