磁盘调度算法
- 📖1. 最短寻道时间优先(SSTF)
- 📖2. 电梯算法(SCAN或C-SCAN)
- 📖3. 最短定位时间优先(SPTF)
- 📖4. 总结
由于IO的高成本,操作系统在决定发送给磁盘的I/O顺序方面历来发挥作用,更具体的说,给定一组I/O请求,磁盘调度程序检查请求并决定下一个要调度的请求.
与任务调度不同,每个任务的长度通常是不知道的,对于磁盘调度,我们可以很好的猜测 “任务” 需要多长时间,通过估计请求的查找和可能的旋转延迟,磁盘调度程序可以知道每个请求将花费多长时间,因此选择先服务花费最少时间的请求. 因此,磁盘调度程序将尝试在其操作中遵循SJF的原则.(principle of SJF,shortest job first)
📖1. 最短寻道时间优先(SSTF)
一种早期的磁盘调度方法称为最短寻道时间优先(Shortest-Seek-Time-First, SSTF),SSTF按磁道对I/O请求队列排序,选择在最近磁道上的请求先完成.
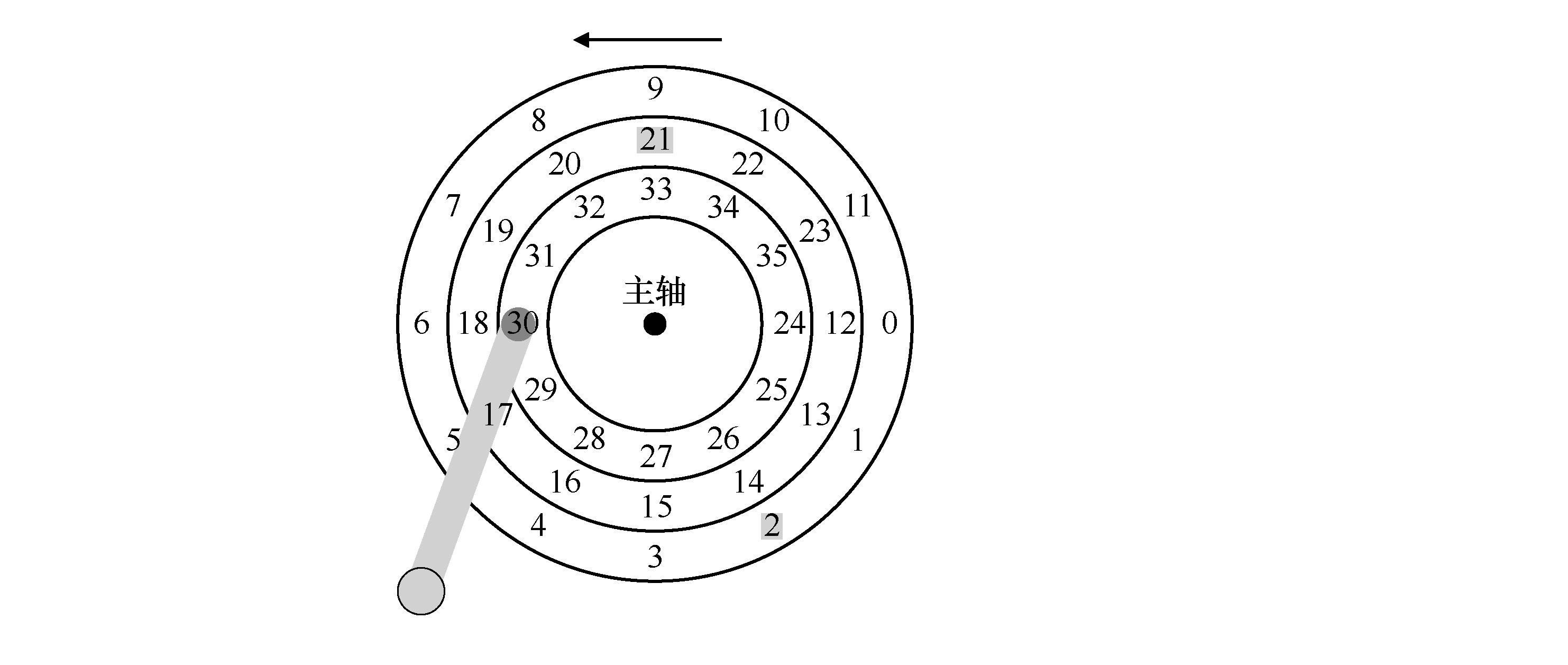
例如:假设磁头当前位置在内圈磁道上,并且我们请求扇区21(中间磁道)和2(外圈磁道),那么我们会首先发出对21的请求,等待它完成,然后发出对2的请求.
在这个例子中,SSTF运作良好,首先寻找中间磁道,然后寻找外圈磁道,但SSTF不是万能的,原因如下:
- 主机操作系统无法利用驱动器的几何结构,而是只会看到一系列的块,但这个问题可以解决,操作系统可以简单的实现最近块优先
(Nearest-Block-First),然后用最近的地址块来请求调度. - 第二个问题更根本:饥饿问题. 如果有过多的内圈磁道请求,那么外圈磁道上的请求将得不到调度,产生饥饿.
SSTF总结:
- 优点:寻道时间最短
- 缺点:可能会造成饥饿(当某个请求的磁盘距离磁头较远,而一直有比其更近的请求时,这个请求一直无法执行)
📖2. 电梯算法(SCAN或C-SCAN)
该算法最初称为SCAN,简单的以跨越磁道的顺序来服务磁盘请求,我们将一次跨越磁盘称为扫一遍. 因此,如果请求的块所属的磁道在这次扫一遍中已经服务过了,它就不会立即处理,而是排队等待下一次扫一遍.
C-SCAN是一种SCAN的变体,即循环SCAN的缩写. 不是在一个方向扫过磁盘,该算法从外圈扫到内圈,然后从内圈扫到外圈,如此下去.
这种算法有时被称为电梯算法(elevator),因为它的行为像电梯,电梯要么向上,要么向下,而不只根据哪层楼更近来服务请求,在磁盘中,它就防止饥饿.
📖3. 最短定位时间优先(SPTF)
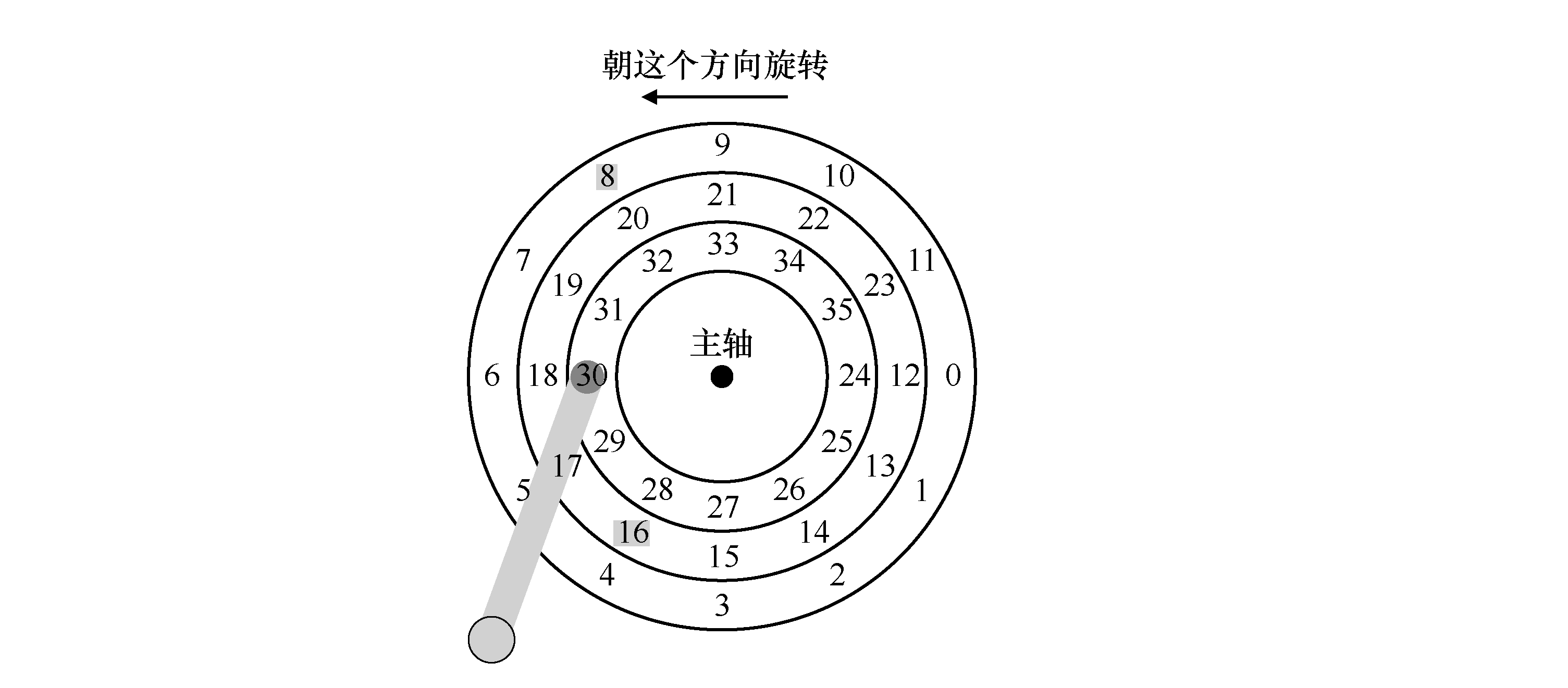
在讨论最短定位时间优先之前(有时也称为最短接入时间优先),我们先来看一个例子,在这个例子中,磁头当前定位在内圈磁道上的扇区30上方. 因此,调度程序必须决定:下一个请求应该安排扇区16还是扇区8,接下来应该服务哪个请求.
答案是:“视情况而定”.
这里的情况是旋转与寻道相比的相对时间,如果在我们的例子中,寻道时间远远高于旋转延迟,那么SSTF就行,但是,如果寻道比旋转块的多,那么,在我们的例子中,寻道远一点的、在外圈磁道的服务请求8,比寻道近一点的、在中间磁道的服务请求16更好,因为16必须旋转很长的距离才能移到磁头下.
在现代驱动器中,正如上面所看到的,查找和旋转大致相当(当然,视具体的请求而定),因此 SPTF 是有用的,它提高了性能。然而,它在操作系统中实现起来更加困难,操作系统通常不太清楚磁道边界在哪,也不知道磁头当前的位置(旋转到了哪里)。因此,SPTF通常在驱动器内部执行.
📖4. 总结
在现代系统中,磁盘可以接受多个分离的请求,它们本身具有复杂的内部调度程序(它们可以准确地实现 SPTF.在磁盘控制器内部,所有相关细节都可以得到,包括精确的磁头位置). 因此,操作系统调度程序通常会选择它认为最好的几个请求(如 16),并将它们全部发送到磁盘。磁盘然后利用其磁头位置和详细的磁道布局信息等内部知识,以最佳可能(SPTF)顺序服务于这些请求.
磁盘调度程序执行的另一个重要相关任务是I/O 合并(I/O merging).
例如,设想一系列请求读取块 33,然后是 8,然后是 34,如文中的图所示. 在这种情况下,调度程序应该将块 33 和34 的请求合并为单个两块请求. 调度程序执行的所有请求都基于合并后的请求.合并在操作系统级别尤其重要,因为它减少了发送到磁盘的请求数量,从而降低了开销.