文章目录
- 写在前面
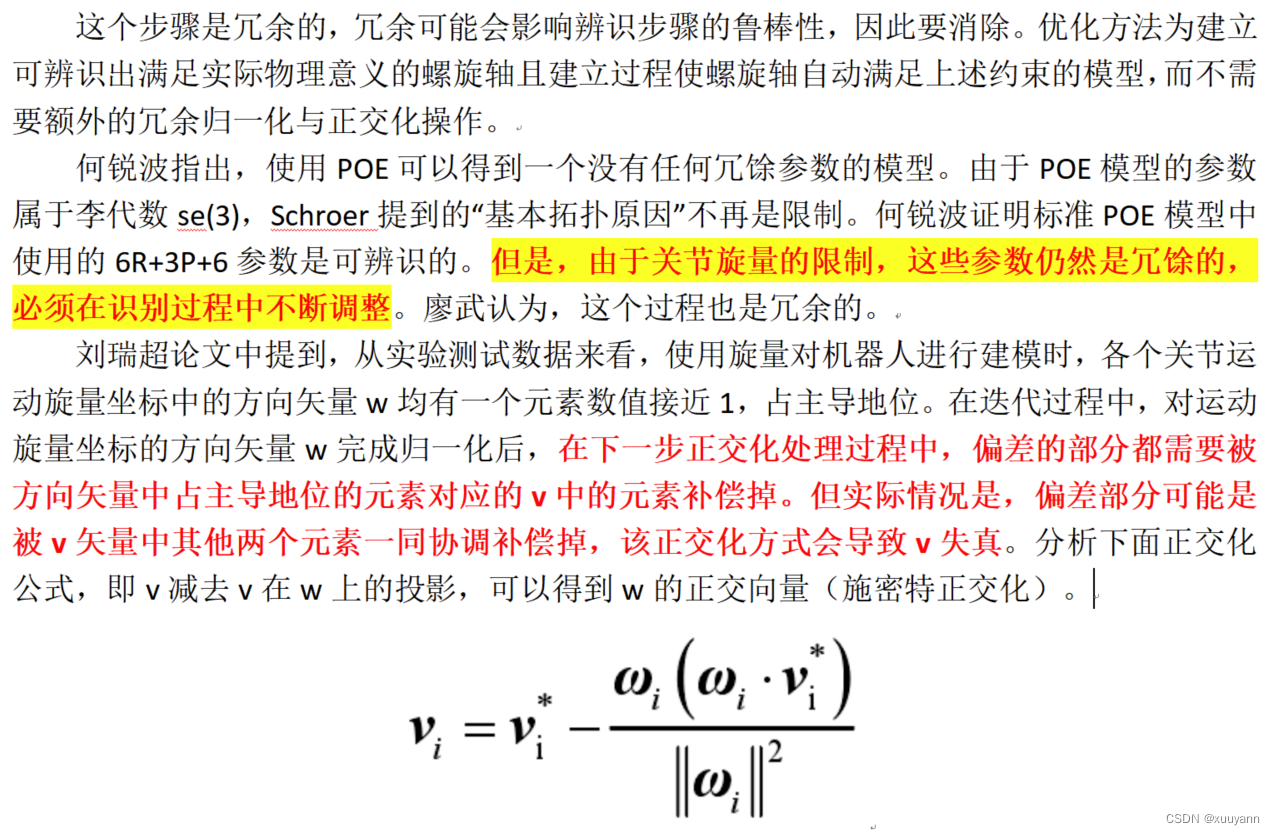
- 为什么要消除归一化和正交化操作?
- 只用位置而不是位姿去做标定的原因
- 基于消除冗余约束步骤的参数辨识模型分析
- 参考文献
写在前面
基于指数积的运动学标定方法介绍:
机器人运动学标定:基于指数积的串联机构运动学标定
机器人运动学标定:基于公垂线模型的指数积标定——减少标定参数,避免过度约束
为什么要消除归一化和正交化操作?
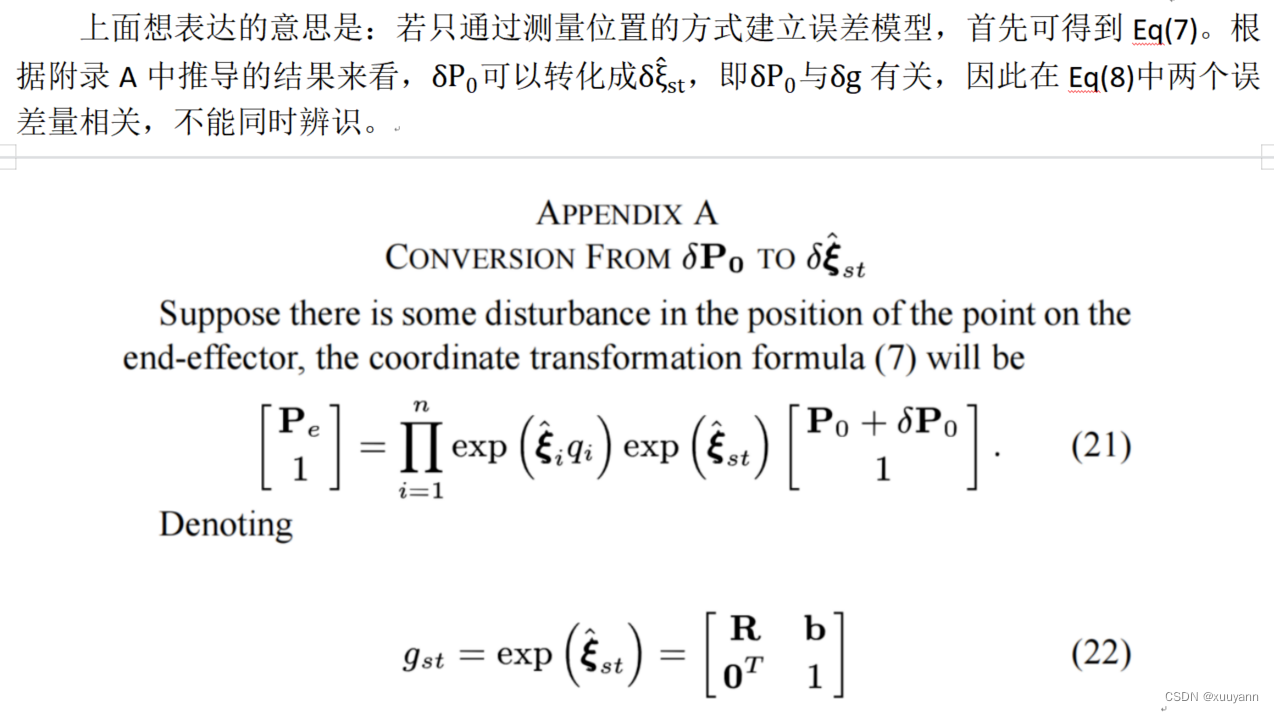
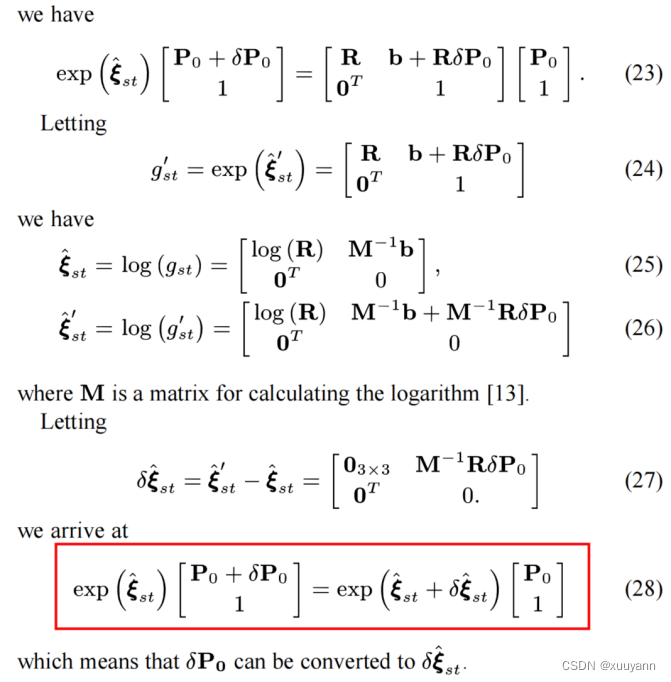
只用位置而不是位姿去做标定的原因
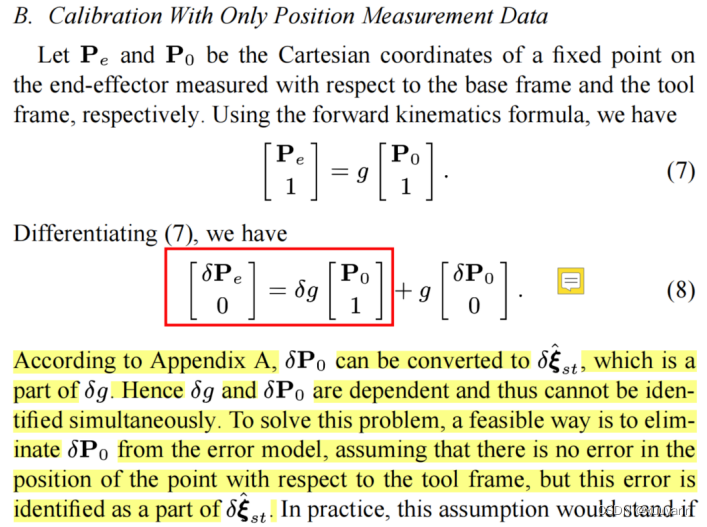
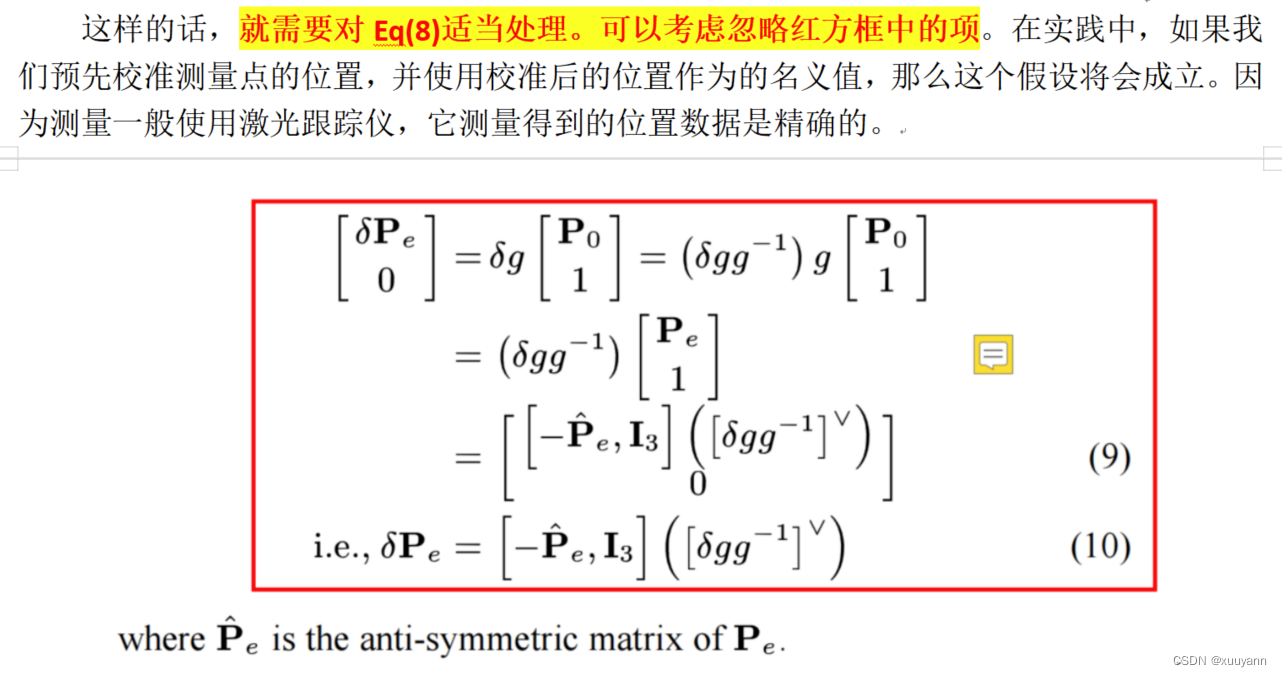
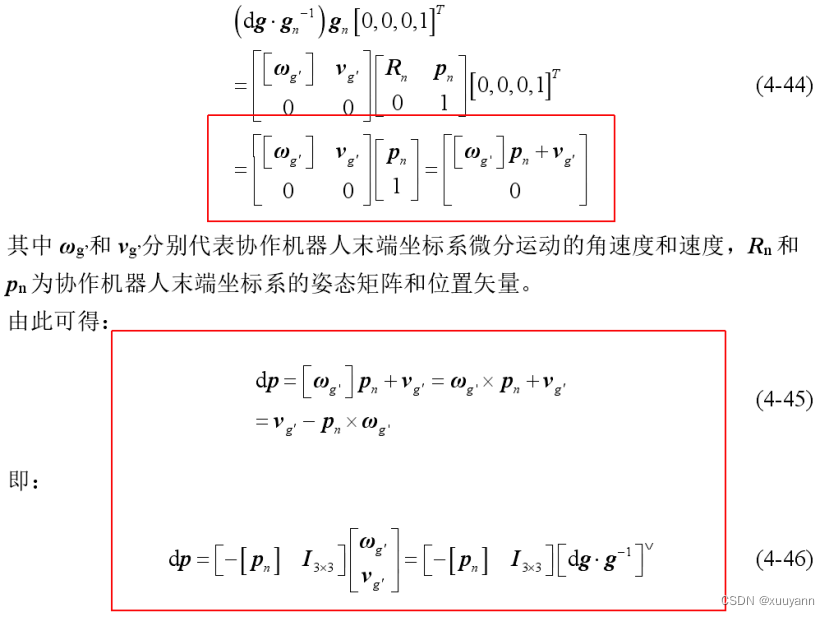
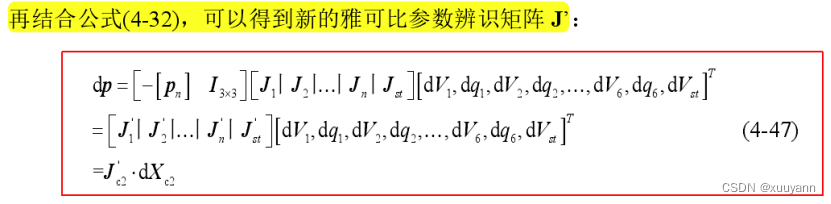
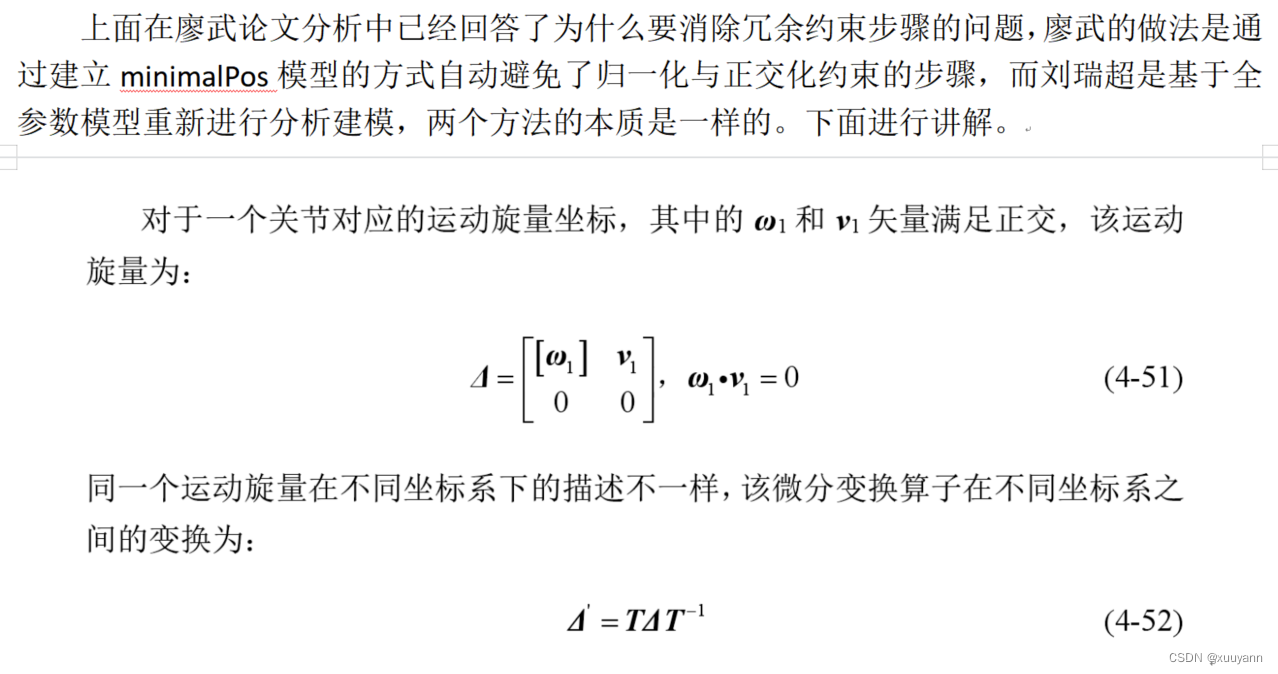
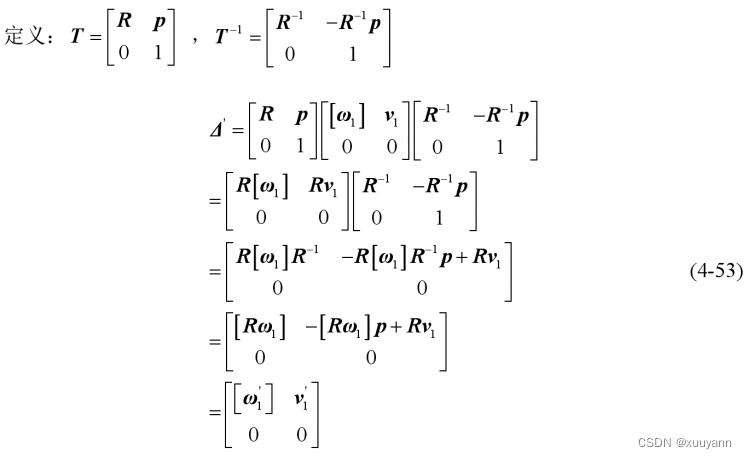
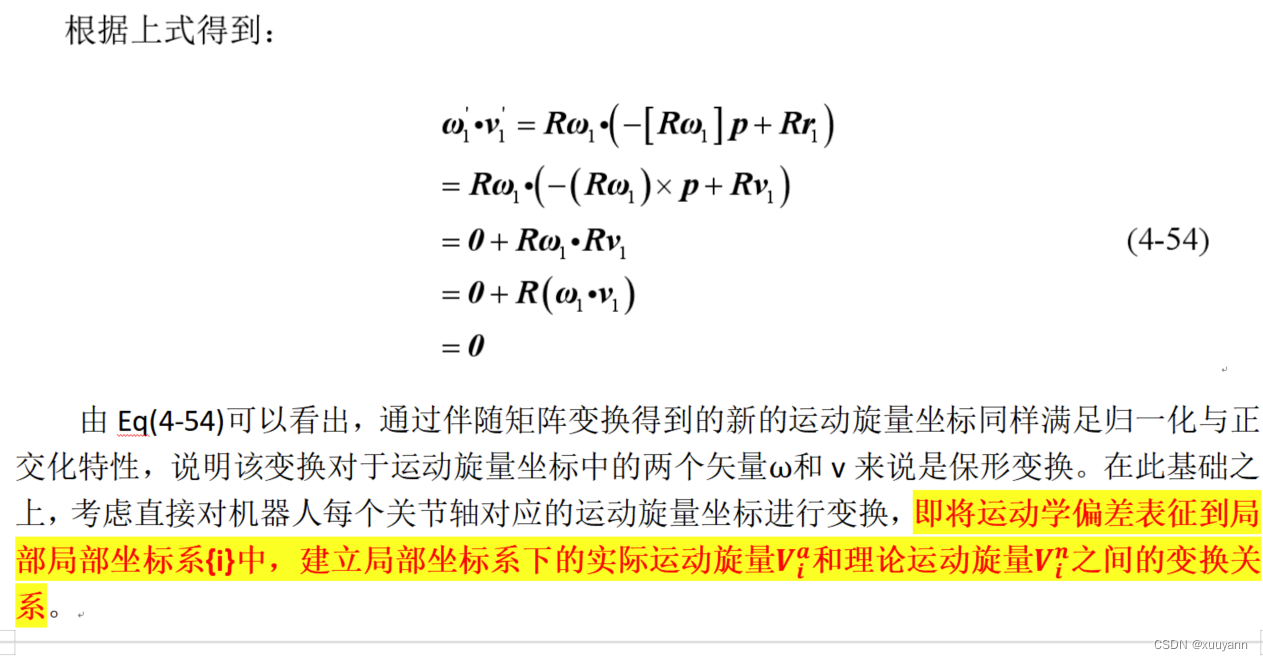
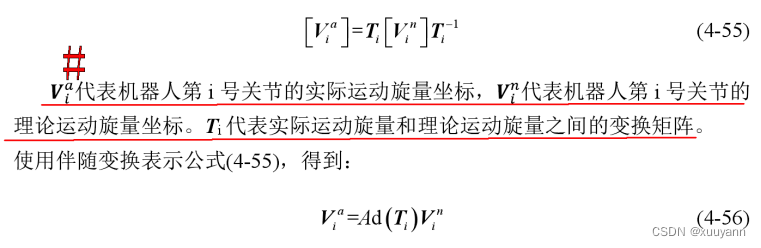
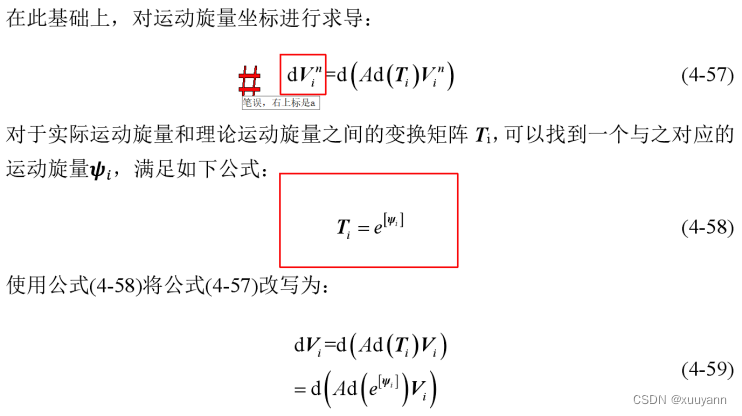
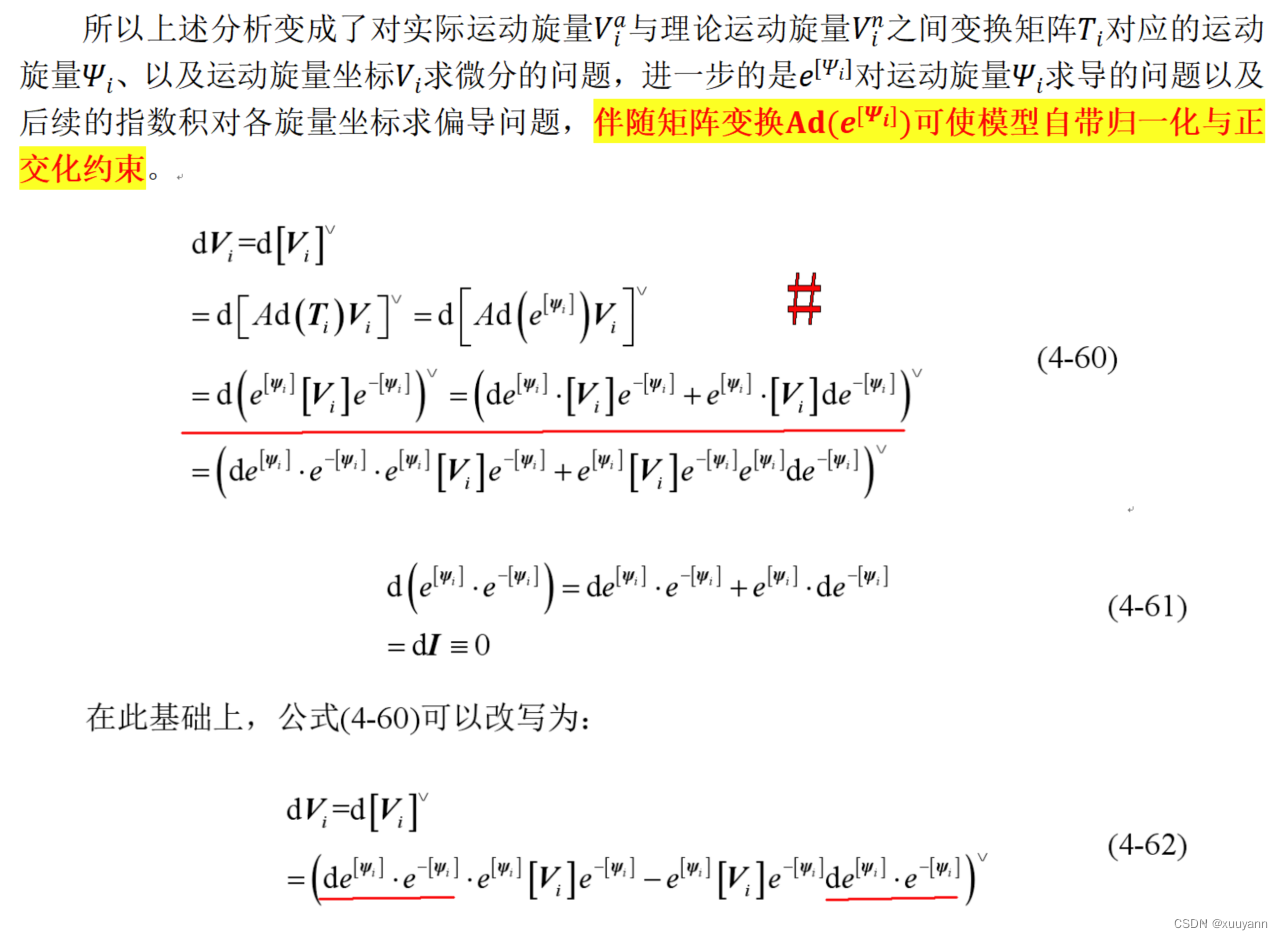
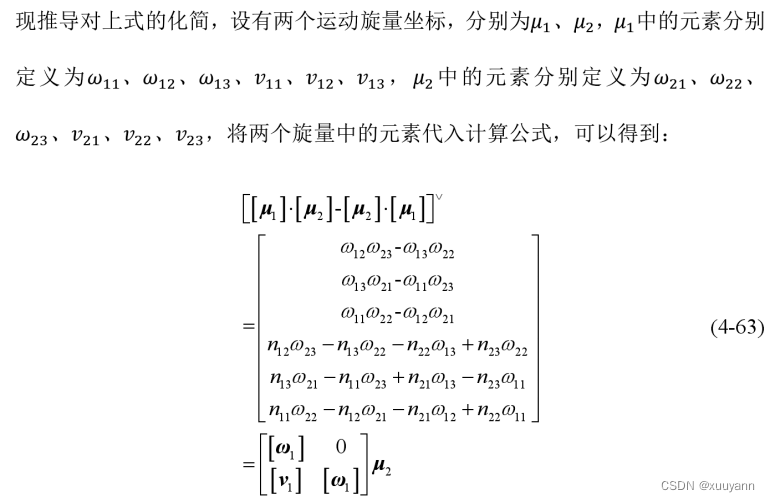
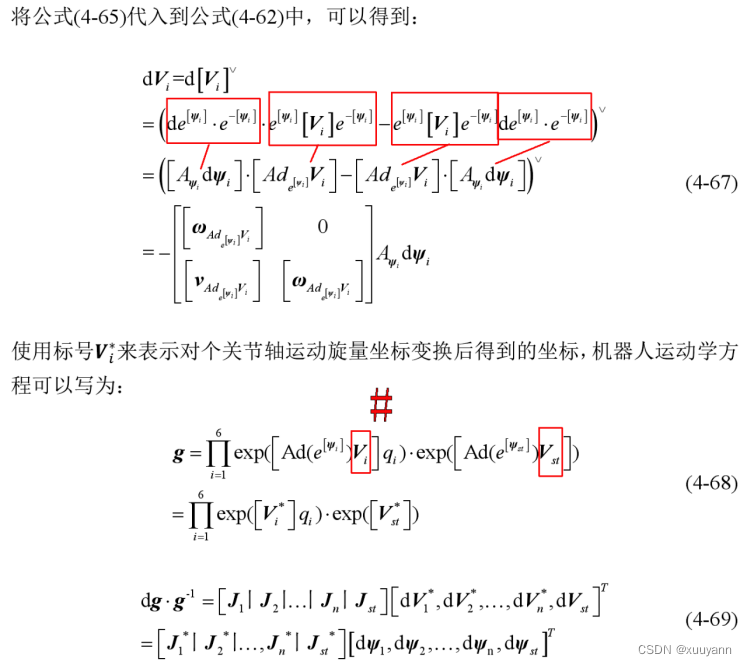
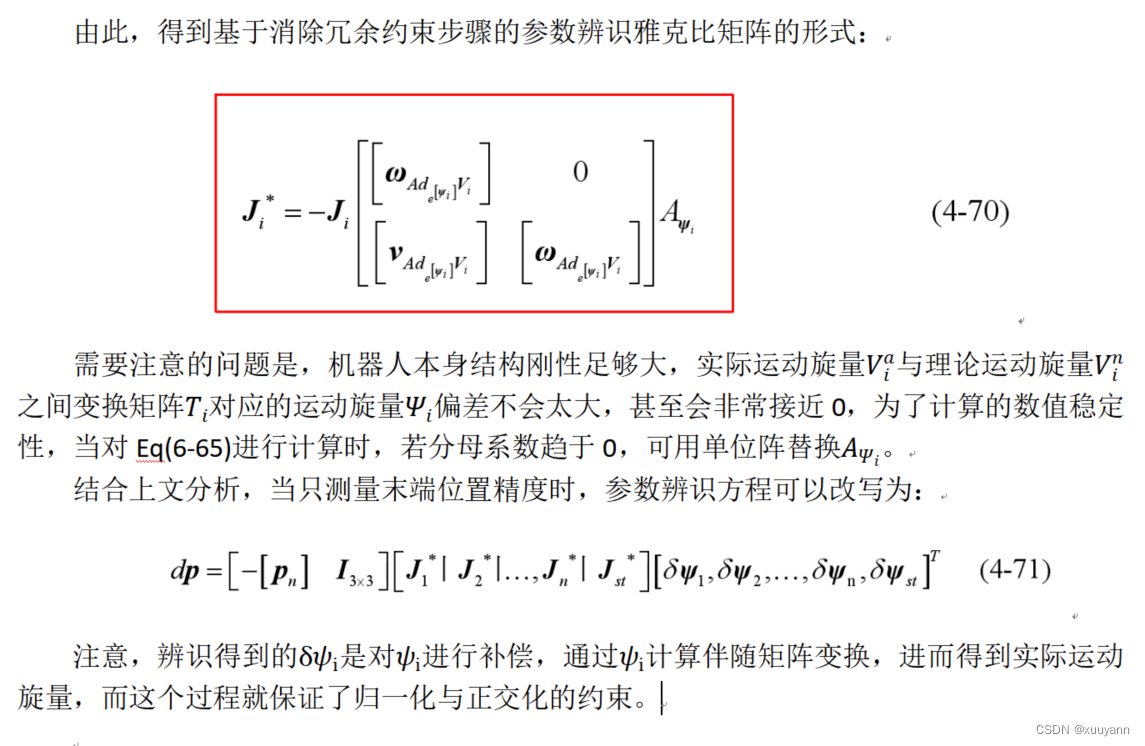
基于消除冗余约束步骤的参数辨识模型分析

参考文献
[1] 刘瑞超. 磁编码器设计与协作机器人运动学参数辨识研究[D].上海交通大学,2020.DOI:10.27307/d.cnki.gsjtu.2020.001024.
[2] 何锐波. 基于指数积公式的串联机构运动学标定方法研究[D].华中科技大学,2010.
[3] Yang X, Wu L, Li J, et al. A minimal kinematic model for serial robot calibration using POE formula[J]. Robotics and Computer-Integrated Manufacturing, 2014, 30(3): 326-334.

![19.[Python GUI] PyQt5中的模型与视图框架-基本原理](https://img-blog.csdnimg.cn/img_convert/0b43def892892ebae81ce7855ce1a6b9.png)