目前已完成
前期已经安装了libfreenect2
使用的系统为ubuntu 18.04
使用的相机为kinect v2
已经安装好了orb_slam3,已经完成使用stereo在euroc数据集和使用RGB-D在tum数据集上的测试
目的
想要完成使用深度相机进行在线测试
步骤
step1
经过查阅资料发现目前仅仅安装了libfreenect2,无法使用ros进行在线测试,于是接着安装iai_kinect2,命令如下:
cd ~/research_subject/test_ws/src
git clone https://github.com/code-iai/iai_kinect2.git
cd iai_kinect2
rosdep install -r --from-paths .
cd ~/research_subject/test_ws
catkin_make -DCMAKE_BUILD_TYPE="Release"
我的安装地址是
主文件夹/catkin_ws/src
结果如下:
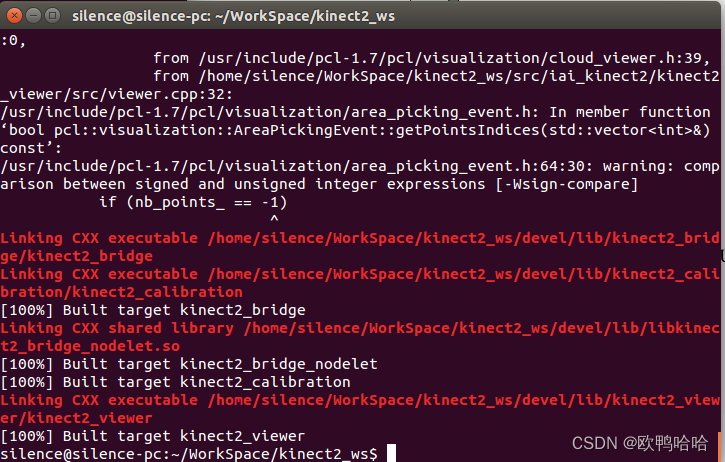 出现100%基本证明安装正常,到这里我没有遇到什么问题。
出现100%基本证明安装正常,到这里我没有遇到什么问题。
step2
使用命令显示图片信息,命令如下:
roslaunch kinect2_bridge kinect2_bridge.launch
我在这个地方出现的报错,查阅信息后发现是没有 source对应的目录,新打开一个命令窗口,输入以下代码可以解决:
source ~/catkin_ws/devel/setup.bash
如果一切顺利,该命令窗口会出现以下信息:
[Info] [Freenect2DeviceImpl] stopping...
[Info] [Freenect2DeviceImpl] canceling rgb transfers...
[Info] [Freenect2DeviceImpl] canceling depth transfers...
[Info] [Freenect2DeviceImpl] stopped
[ WARN] [1670639276.511795720]: [Kinect2Bridge::initCalibration] using sensor defaults for color intrinsic parameters.
[ WARN] [1670639276.511932721]: [Kinect2Bridge::initCalibration] using sensor defaults for ir intrinsic parameters.
[ WARN] [1670639276.512291430]: [Kinect2Bridge::initCalibration] using defaults for rotation and translation.
[ WARN] [1670639276.512459212]: [Kinect2Bridge::initCalibration] using defaults for depth shift.
[ INFO] [1670639276.633469354]: [DepthRegistration::New] Using CPU registration method!
[ INFO] [1670639276.633580950]: [DepthRegistration::New] Using CPU registration method!
[ INFO] [1670639276.740004786]: [Kinect2Bridge::main] waiting for clients to connect
rosrun kinect2_viewer kinect2_viewer
[ INFO] [1670639676.695478026]: [Kinect2Bridge::callbackStatus] client connected. starting device...
此时表明代码运行正常,只是在等待连接,需要另外打开一个窗口发布数据。
另一个窗口中进入catkin_ws文件中,输入以下命令:
source devel/setup.bash
rosrun kinect2_viewer kinect2_viewer
到这里,我的电脑已经出现图像了,如下所示: 在线测试方面内容请参考我的其他博客。
在线测试方面内容请参考我的其他博客。



![[机缘参悟-93]:时间、空间、多维度、动态、全局、系统思考模型汇总](https://img-blog.csdnimg.cn/img_convert/cd93f048ded67ceca8e3c1bb707f9a06.png)