1. 本文测试环境:
ubuntu:20.04,虚拟机
ROS1:noetic
ROS2:foxy
2. 先说结论
ROS1 与 ROS2 共存,需要考虑三个问题:
1) 不同Ubuntu版本,有不同版本的ROS1和ROS2推荐,尽量不要任性地乱装;
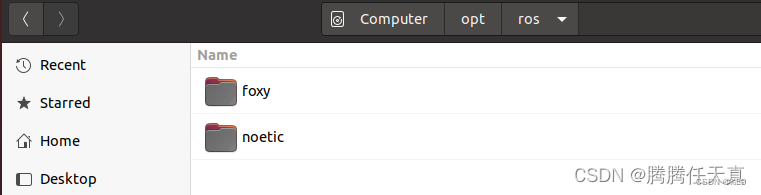
2)ROS1和ROS2安装过程中,是否会出现文件“删改”的问题?目前使用下来,并没有。找一找两者的安装路径,会发现有各自独立的地盘。如下图RO1(noetic)和ROS2(foxy)独立存放。
参考链接:
如何将ROS1和ROS2安装到同一个ubuntu系统中
3,ros1 instal
jetson zoo
catkin_make -DPYTHON_EXECUTABLE=/usr/bin/python3
echo $ROS_DOMAIN_ID
export ROS_DOMAIN_ID=0
echo $ROS_DOMAIN_ID
4,ros2 install
**colcon build --cmake-args -DPYTHON_EXECUTABLE&#