文章目录
- 一、DL-22简介
- 二、模块配置
- 三、串口通信(透明传输)
一、DL-22简介
DL-22无线串口模块为串口转2.4G无线模块,可以通过无线将两个或者多个串口连接起来。串口发入模块的数据会被模块使用无线发出,收到无线数据的模块会将这个数据使用串口发出,在两个设备上使用模块就像将这两个设备用串口连接起来一样。
1. 主要特点
- 点对点传输带有确认,数据丢失率为0.00%。
- 支持串口不间断发送。
- 支持串口双向同时收发。
- 最高可达3300字节每秒的传输速率。
- 适应2.8V~3.5V。
- 使用单个按键进行设置,可以修改模块的信道、波特率。
- 按键可配置为多对多模式。
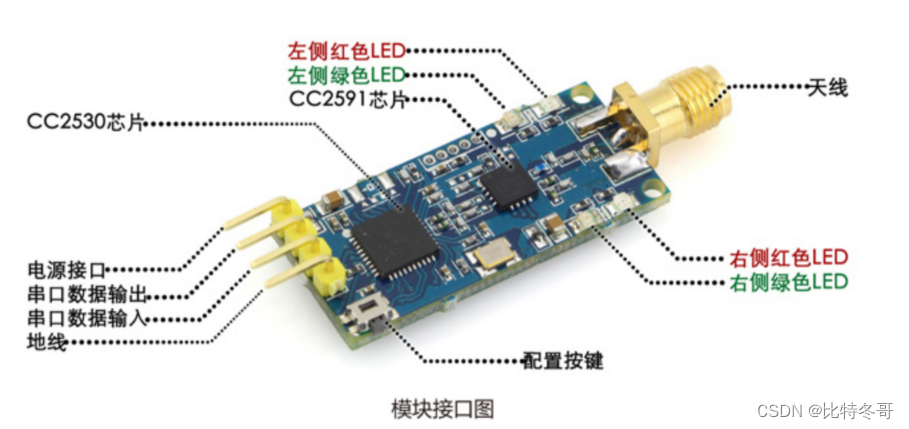
2. 模块实图
3. 模式说明
- DL-22模块可以配置为点对点模式和广播模式使用。
- 点对点模式分为A端和B端,A端串口收到的数据会被B端串口发出,反之亦然。此模式下同一频道只准许两个节点互相通信,通信可保证数据丢失率为0.00%。
- 广播模式下,一个节点的串口收到的数据会从所有距离可及,且频道相同的节点收到,并从串口发出。
- 在对模块进行配置时,可以将同一个信道的两个模块配置为点对点A端和点对点B端,以获得О数据丢失的功能;或者将多个模块全部配置为广播模式,以获得多对多通信的功能。除此之外的通信模式都是不可用的。
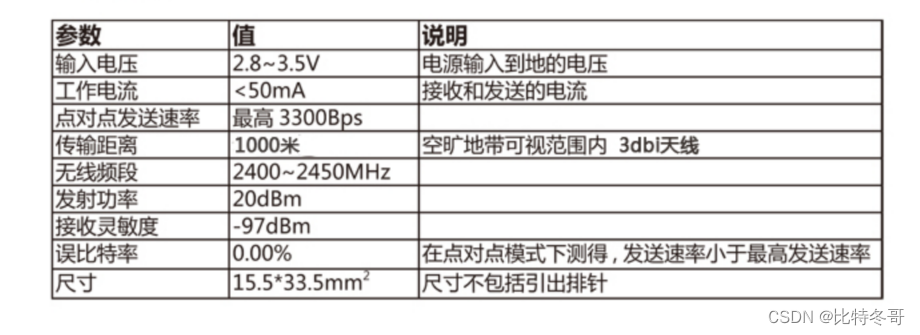
4. 产品参数
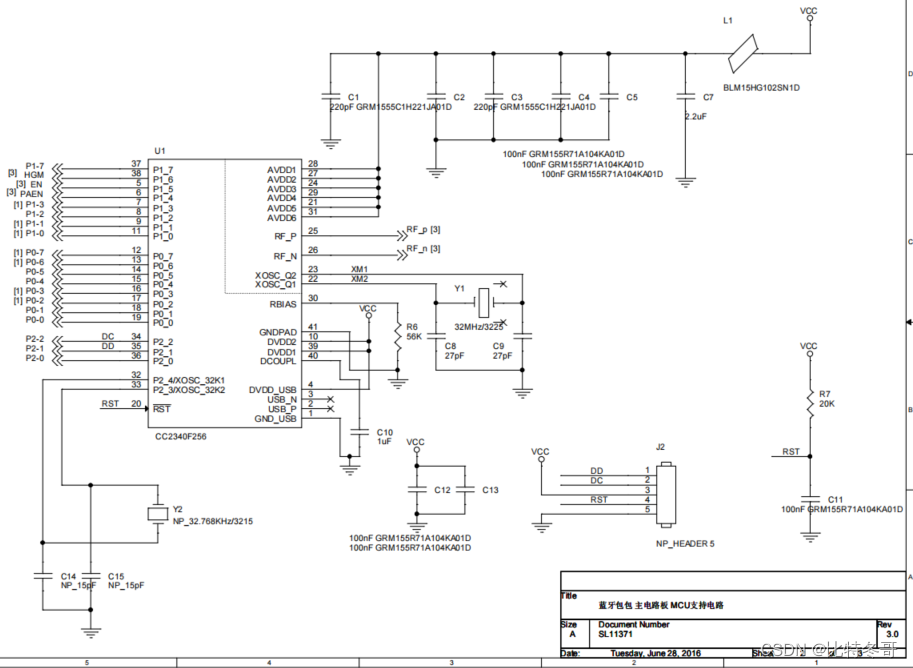
5. 原理图
二、模块配置
DL-22模块配置分5个步骤︰
-
- 进入设置模式
-
- 设置波特率
-
- 设置频道
-
- 设置主/从机
-
- 确认设置
第一步-进入设置模式
在模块断电的情况下按下按键不松手,然后给模块供电,模块的四个LED会不断循环闪烁,此时释放按键,LED循环闪烁会停止,即进入设置模式。
第二步-设置波特率
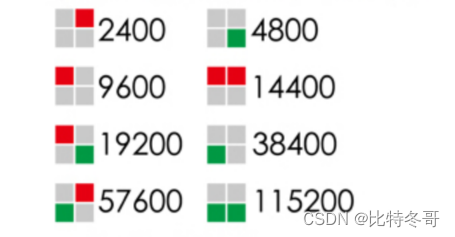
完成第一步后,模块会使用LED指示当前的波特率,短按按键可以切换波特率。点亮的LED和波特率的对应关系如下表:
第三步–设置频道
在设置波特率完成后,长按按键直到LED循环闪烁,释放按键后可进入频道设置阶段。
在此阶段,点亮的LED会快速闪烁,代表选中一个频道。短按按键可以切换到下一个频道。本模块提供16个频道,分别对应四个LED的16种状态(包括全部LED熄灭)。如果您只有两个模块,可以先将第-个模块的频道设置为任意状态,然后记下闪烁LED的位置,在设置第二个模块时将LED设置成和上一个相同即可。只要频道相同,波特率不同的两个模块也可以互相通信。
第四步–设置模式
在设置频道完成后,长按按键直到LED循环闪烁,可进入模式设置阶段。
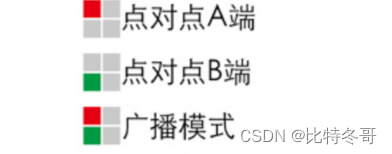
在此阶段,点亮的LED会缓慢的闪烁。短按按键,LED会在三种模式之间切换。
第五步–确认设置
在模式设置完成后,长按按键直到LED循环闪烁,释放按键后所有LED常亮2秒钟,之后会进入正常工作模式,刚刚配置的内容即可保存并生效。如果不希望刚刚的设置生效,则可给模块断电。在确认设置前的任何阶段给模块断电,设置的信息都不会被保存。
三、串口通信(透明传输)
1. 串口初始化
void uart_init2(u32 bound)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能USART2,GPIOA时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE); //使能USART2,GPIOA时钟
//USART2_TX GPIOA.2
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //PA.2
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.2
//USART2_RX GPIOA.3初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.3
//USART2 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART2, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART2, ENABLE); //使能串口1
}
2. 接受中断
将接收到的数据存入缓冲区
void USART2_IRQHandler(void) //串口1中断服务程序
{
u8 Res;
if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART2); //读取接收到的数据
if((USART2_RX_STA&0x8000)==0)//接收未完成
{
if(USART2_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART2_RX_STA=0;//接收错误,重新开始
else USART2_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART2_RX_STA|=0x4000;
else
{
USART2_RX_BUF[USART2_RX_STA&0X3FFF]=Res ;
USART2_RX_STA++;
if(USART2_RX_STA>(USART2_REC_LEN-1))USART2_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
}
3. 逻辑判断
如果接收到指定数据,led闪烁
if(USART2_RX_STA&0x8000)
{
if(USART2_RX_BUF[0]=='1')
{
for(j=0;j<=10;j++)
{
LED1=~LED1;
delay_ms(100);
}
}
else if(USART2_RX_BUF[0]=='2')
{
for(j=0;j<=10;j++)
{
LED0=~LED0;
delay_ms(100);
}
}
memset(USART2_RX_BUF,0,sizeof(USART2_RX_BUF));
USART2_RX_STA=0;
}





![[Gitops--8]微服务前置中间件部署](https://img-blog.csdnimg.cn/220eea8fc1e7435195cd43c13744c0ff.png)



![[Java] 中的具体集合](https://img-blog.csdnimg.cn/63e9a4a287f34001b07b95c0caed0027.png#pic_center)