文章目录
- 运行环境:
- 1.1 原理
- 1)A板原理图
- 2)PA8引脚配置
- 3)定时器Timers配置
- 2.1代码解释
- 1)定时器1初始化函数
- 2)启动定时器中断
- 3)启动PWM/设置占空比
- 4)launch设置
- 5) 编译调试
- 3.1实验效果
运行环境:
ubuntu18.04.melodic
宏基暗影骑士笔记本
stm32f427IIH6
stlink
9-24v可调电源
1.1 原理
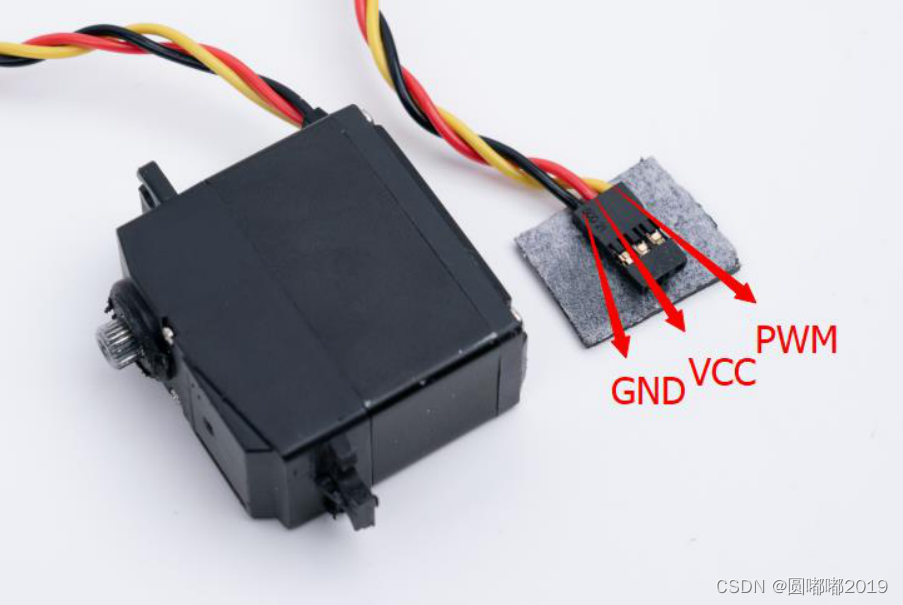
调节占空比来调节舵机的角度
1)A板原理图
A板 的PWM由定时器1的1,2,3,4通道
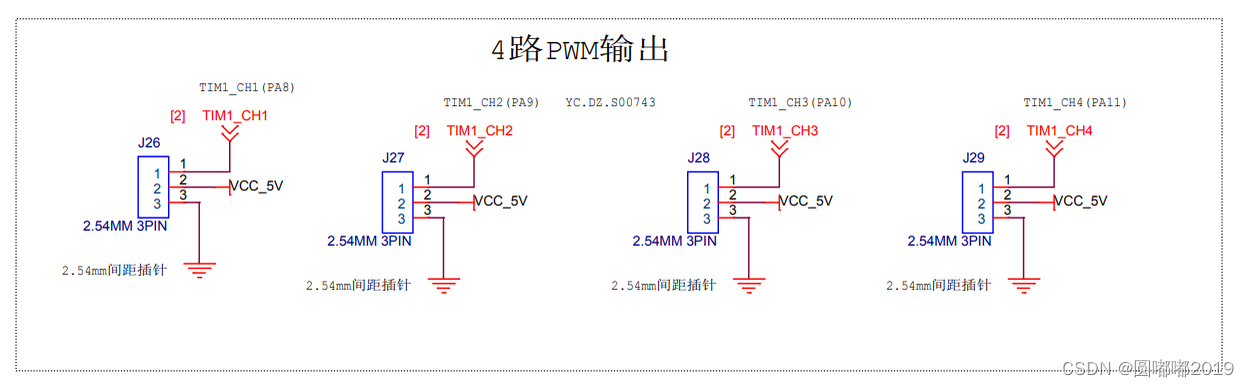 TIM1_CH1对应PA8
TIM1_CH1对应PA8
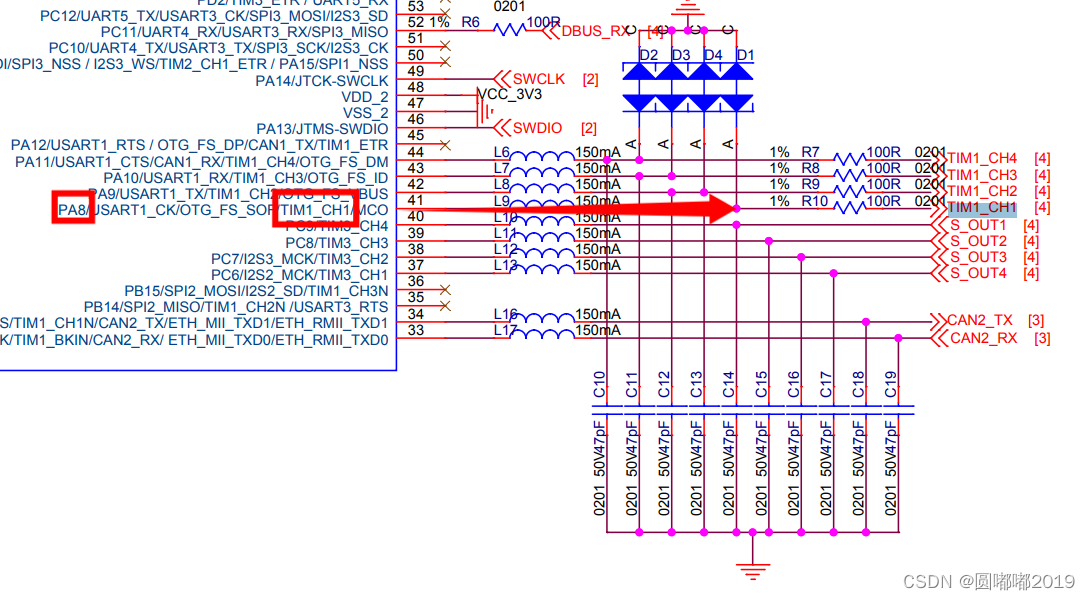
2)PA8引脚配置
配置为定时器1的第1通道:TIM1_CH1

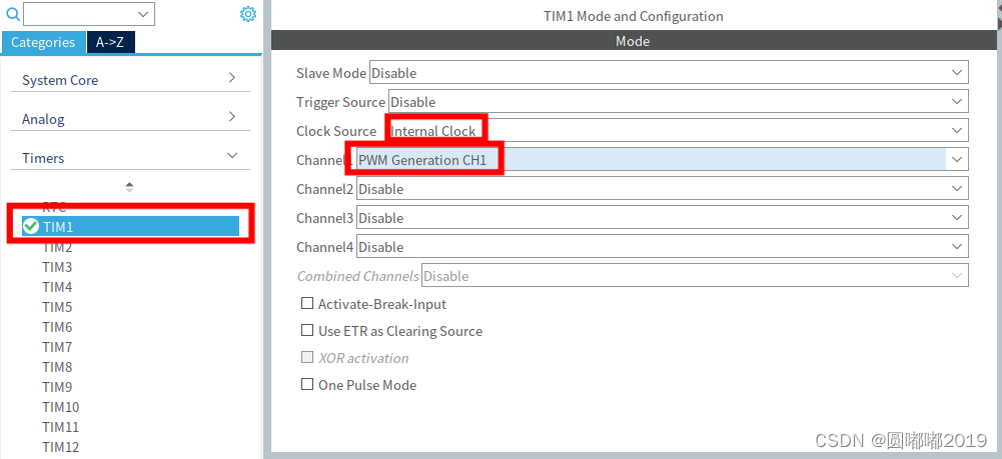
3)定时器Timers配置
内部时钟
通道1:PWM模式
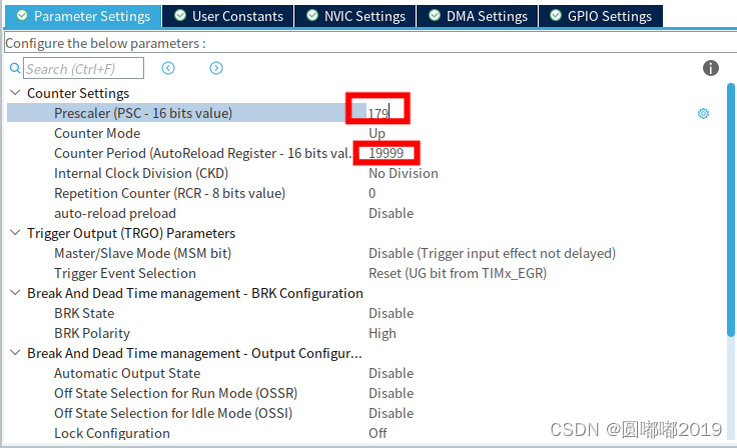 180 000 000 /180分频 = 1000 000 (180-1=179)
180 000 000 /180分频 = 1000 000 (180-1=179)
1000 000 / 50Hz = 20000 (20000-1=19999)
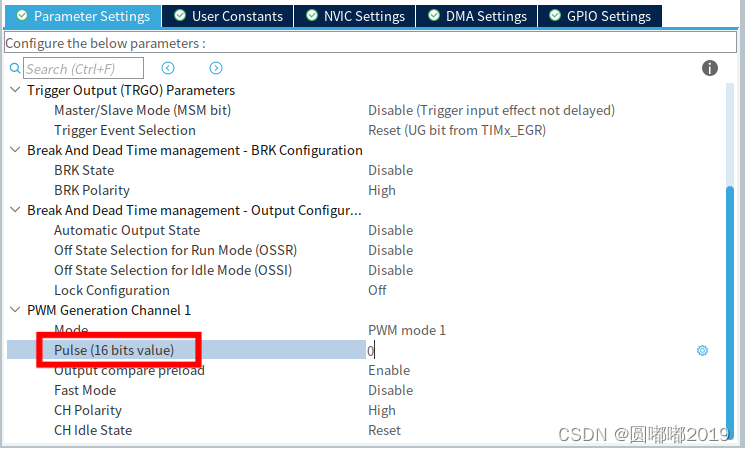
脉冲设置为1000
0-1000 输出高电平
1000-65535 输出低电平
平常脉冲设置为0,代码中可以设置
2.1代码解释
1)定时器1初始化函数
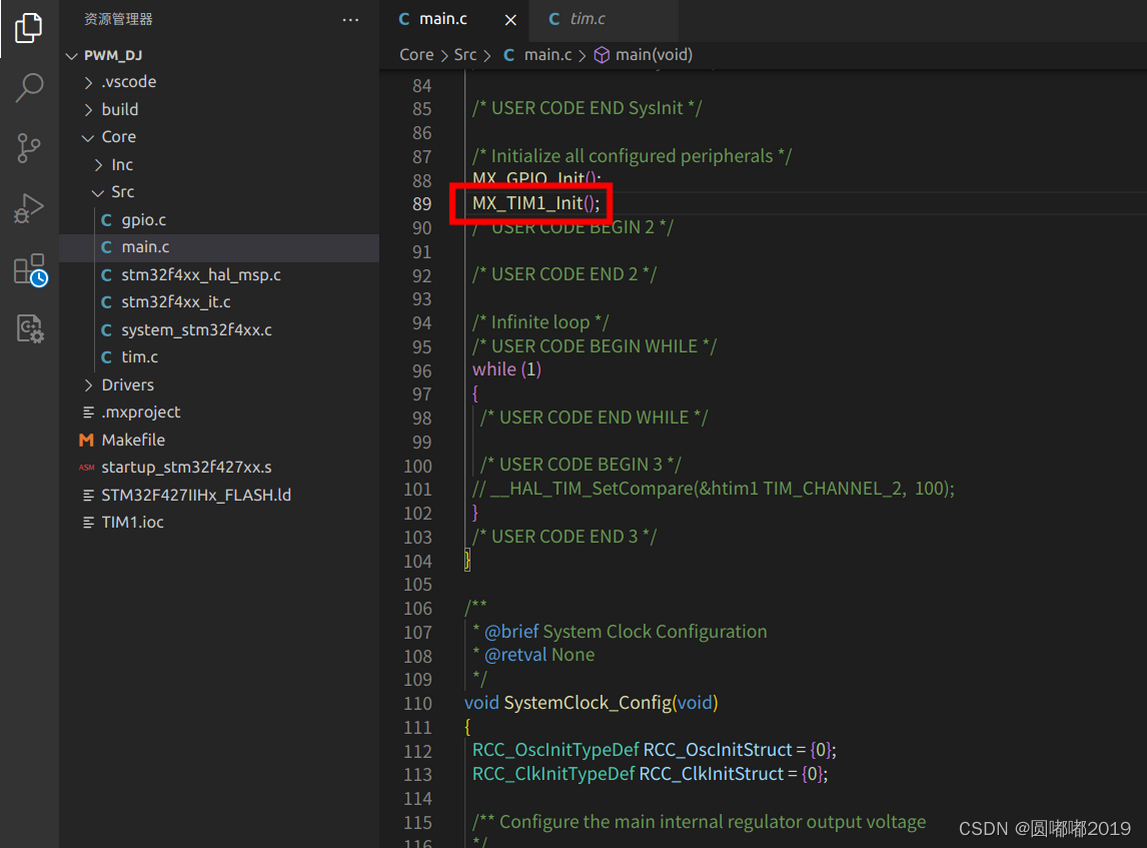
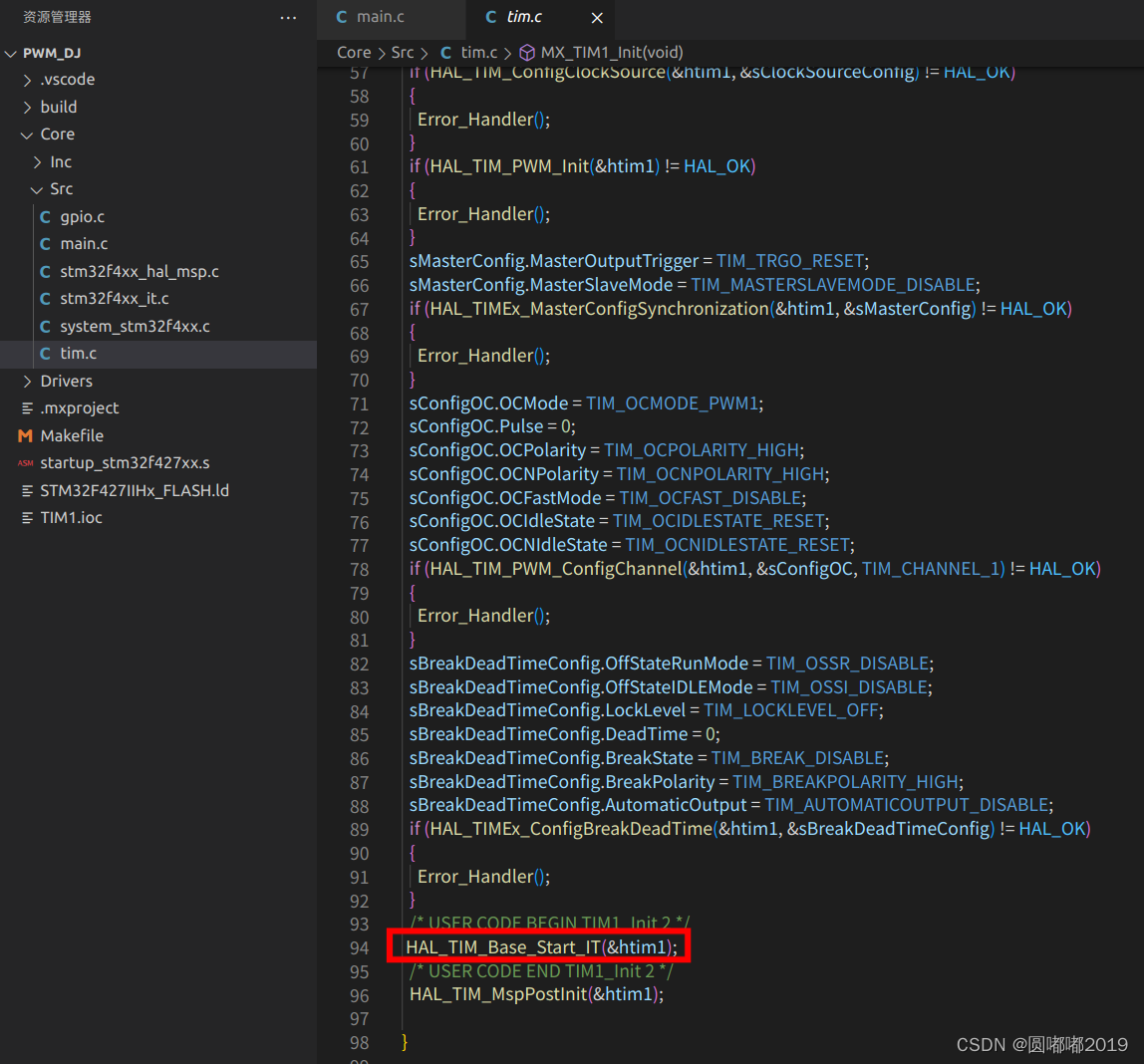
2)启动定时器中断
进入定时器1的初始化函数,启动定时器1中断
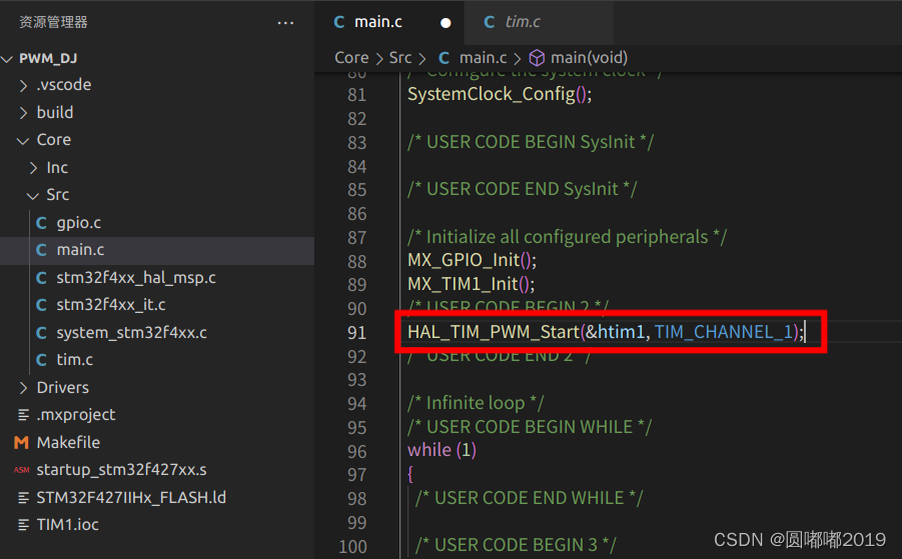
3)启动PWM/设置占空比
启动PWM(定时器1的第1通道)
设置占空比
2000–180度
1000–0度
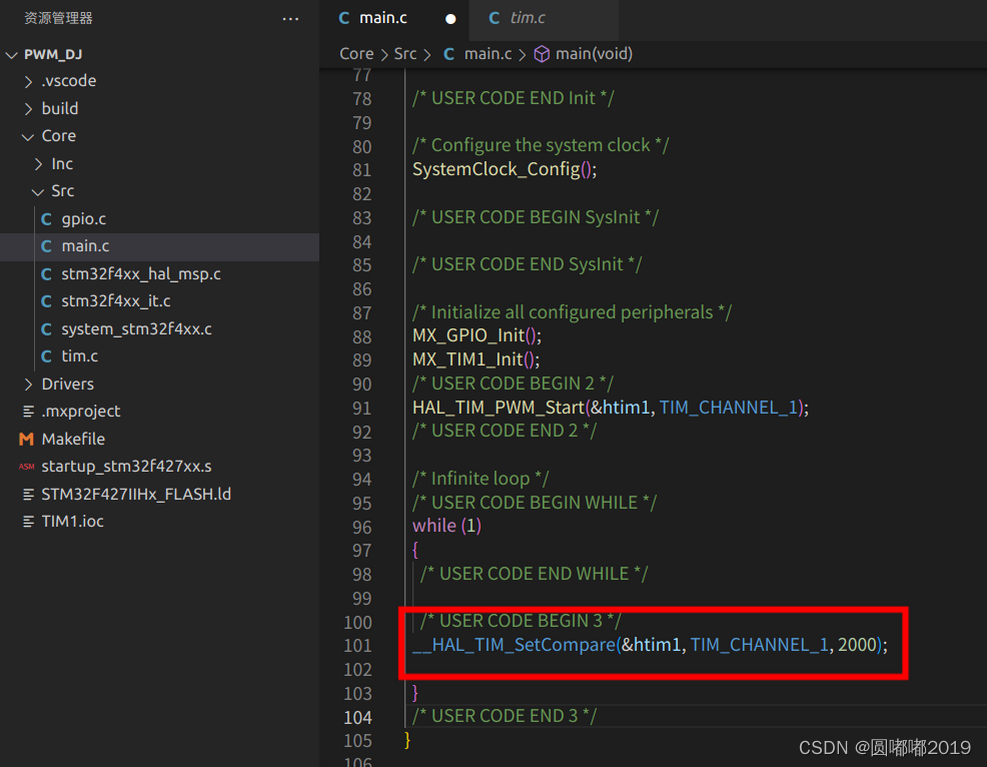
__HAL_TIM_SetCompare(&htim1, TIM_CHANNEL_1, 2000);
4)launch设置
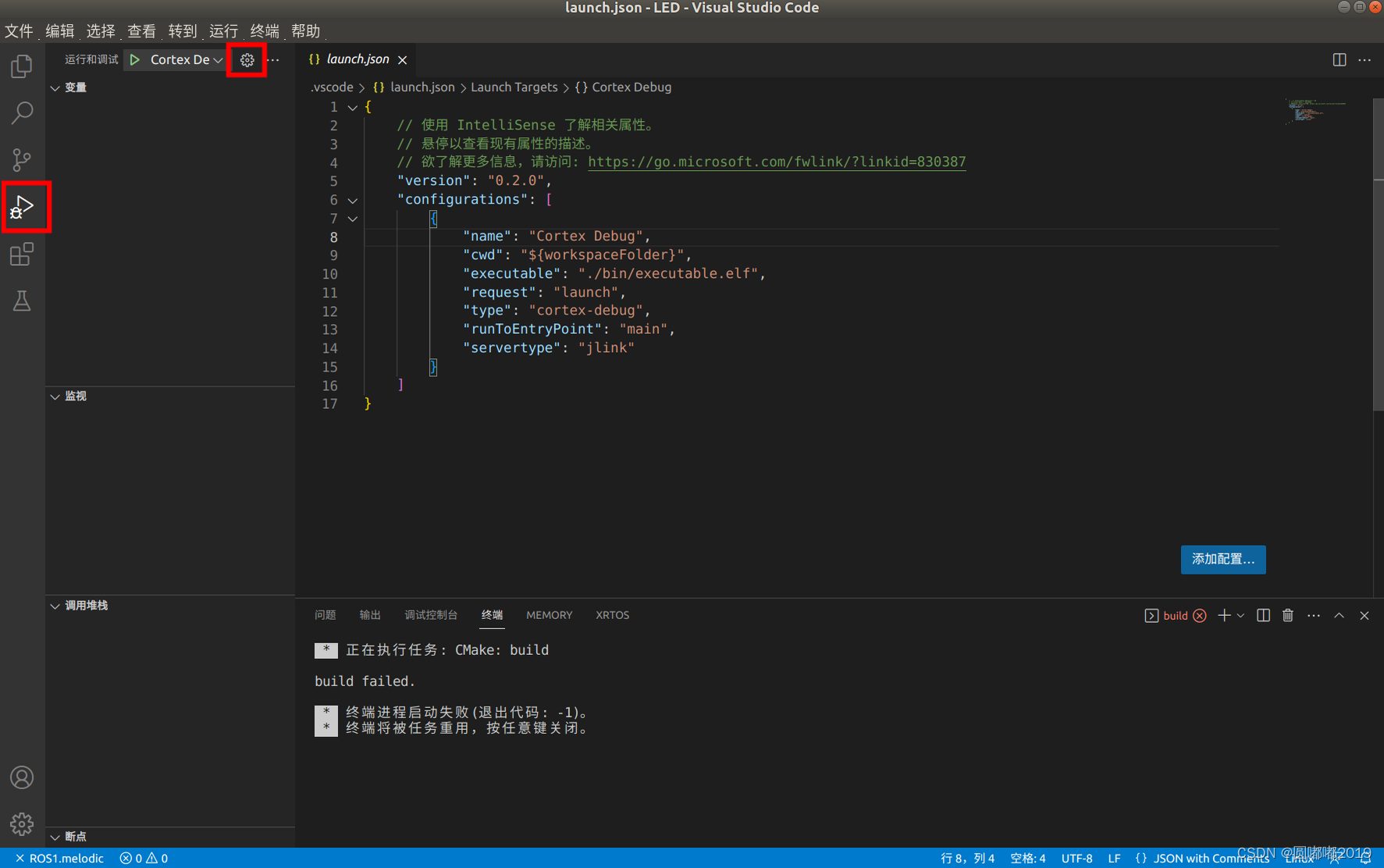
修改成以下内容:可执行文件名是TIM1.elf
{
"configurations": [
{
"showDevDebugOutput": "parsed",
"cwd": "${workspaceRoot}",
"executable": "./build/TIM1.elf",
"name": "Debug STM32",
"request": "launch",
"type": "cortex-debug",
"servertype": "openocd",
"device": "stm32f427",
"configFiles": [
"interface/stlink-v2-1.cfg",
"target/stm32f4x.cfg"
]
}
]
}
5) 编译调试
ctrl +s 保存
make
F5 编译调试
3.1实验效果
通过调节占空比调节舵机角度

![[Java] 中的具体集合](https://img-blog.csdnimg.cn/63e9a4a287f34001b07b95c0caed0027.png#pic_center)