目录
FreeRTOS内存管理
FreeRTOS内存管理算法
内存管理相关API函数介绍
实验源码
FreeRTOS内存管理
在使用FreeRTOS创建任务、队列、信号量等对象的时,一般都提供了两种方法:
动态方法创建
自动地从 FreeRTOS 管理的内存堆中申请创建对象所需的内存,并且在对象删除后可将这块内存释放回FreeRTOS管理的内存堆。
静态方法创建
需用户提供各种内存空间,并且使用静态方式占用的内存空间一般固定下来了,即使任务、队列等被删除后,这些被占用的内存空间一般没有其他用途。
总结:动态方式管理内存相比与静态方式,更加灵活。
除了FreeRTOS提供的动态内存管理方法,标准的C库也提供了函数malloc()和函数free()来实现动态地申请和释放内存。
不用标准的C库自带的内存管理算法,因为标准C库的动态内存管理方法有如下几个缺点:
1.占用大量的代码空间不适合用在资源紧缺的嵌入式系统中
2.没有线程安全的相关机制
3.运行有不确定性,每次调用这些函数时花费的时间可能都不相同
4.内存碎片化
因此,FreeRTOS提供了多种动态内存管理的算法,可针对不同的嵌入式系统!
FreeRTOS内存管理算法
FreeRTOS提供了5种动态内存管理算法,分别为:heap_1、heap_2、heap_3、heap_4、heap_5。
如下所示:
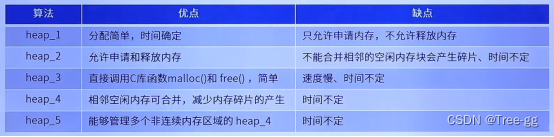
heap_1内存管理算法
heap_1只实现pvPortMalloc,没有实现vPortFree;也就是说,它只能申请内存,无法释放内存!
如果你的工程,创建好的任务、队列、信号量等都不需要被删除,那么可以使用heap_1内存管理算法。
heap_1的实现最为简单,管理的内存堆是一个数组,在申请内存的时候,heap_1 内存管理算法只是简单地从数组中分出合适大小的内存,内存堆数组的定义如下所示:

heap_1内存管理算法的分配过程如下图所示:
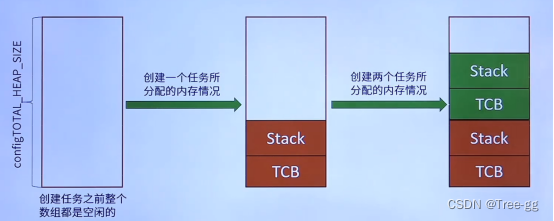
注意:heap_1内存管理算法,只能申请无法释放!
heap_2内存管理算法
相比于 heap_1 内存管理算法,heap_2内存管理算法使用最适应算法,并且支持释放内存;
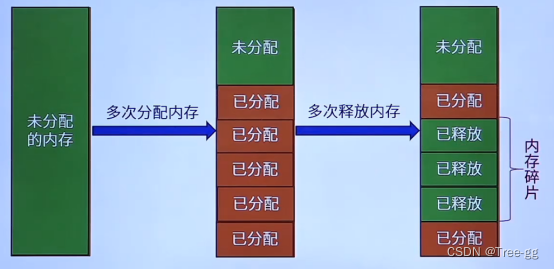
heap_2内存管理算法并不能将相邻的空闲内存块合并成一个大的空闲内存块;因此heap_2内存管理算法不可避免地会产生内存碎片;
最适应算法:
假设heap有3块空闲内存(按内存块大小由小到大排序):5字节、25字节、50字节
现在新创建一个任务需要申请20字节的内存。
第一步:找出最小的能满足pvPortMalloc的内存: 25字节
第二步:把它划分为20字节、5字节;返回这20字节的地址,剩下的5字节仍然是空闲状态,留给后续的pvPortMalloc使用
内存碎片是由于多次申请和释放内存,但释放的内存无法与相邻的空闲内存合并而产生的
适用场景:频繁的创建和删除任务,且所创建的任务堆栈都相同,这类场景下Heap_2没有碎片化的问题
heap_4内存管理算法
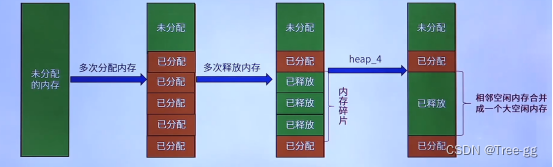
heap_4 内存管理算法使用了首次适应算法,也支持内存的申请与释放,并且能够将空闲且相邻的内存进行合并,从而减少内存碎片的现象。
首次适应算法:
假设heap有3块空闲内存(按内存块地址由低到高排序)5字节、50字节、25字节
现在新创建一个任务需要申请20字节的内存。
第一步:找出第一个能满足pvPortMalloc的内存:50字节
第二步:把它划分为20字节、30字节;返回这20字节的地址,剩下30字节仍然是空闲状态,留给后续的pvPortMalloc使用
heap_4内存管理算法会把相邻的空闲内存合并为一个更大的空闲内存,这有助于减少内存的碎片问题。
heap_5内存管理算法
heap_5内存管理算法是在heap_4 内存管理算法的基础上实现的,但是 heap_5 内存管理算法在heap_4内存管理算法的基础上实现了管理多个非连续内存区域的能力。
heap_5内存管理算法默认并没有定义内存堆,需要用户手动指定内存区域的信息,对其进行初始化。使用如下结构体:
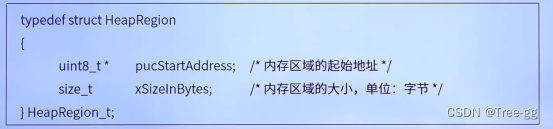
适用场景:在嵌入式系统中,那些内存的地址并不连续的场景。
内存管理相关API函数介绍
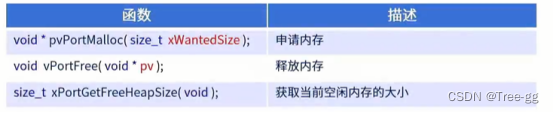
申请内存函数
void* pvPortMalloc( size_t xWantedSize);xWantedSize:申请的内存大小,以字节为单位;
返回值:返回一个指针,指向已分配大小的内存。如果申请内存失败,则返回NULL。
释放内存函数
Void (void *pv)*pv:指针指向一个要释放内存的内存块;
获取当前空闲内存大小函数
size_t xPortGetFreeHeapSize(void);返回值:返回当前剩余的空闲内存大小
实验源码
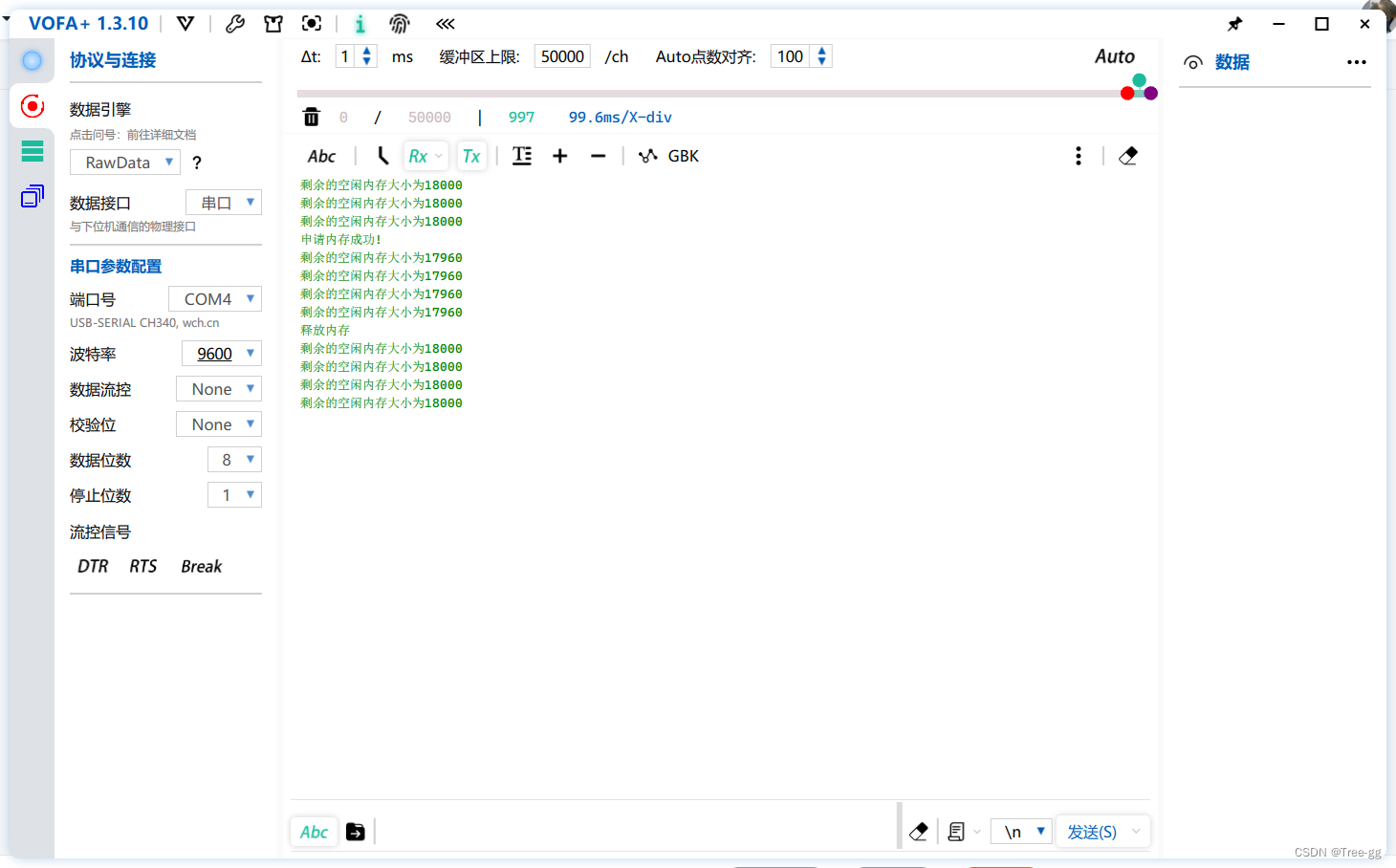
使用FreeRTOS内存管理,并观察内存在申请和释放过程中内存大小的变化情况。
将设计两个任务:start_task、task1
start_task:用来创建task1任务
task1:用于按键扫描,当KEY0按下则申请内存,当KEY1按下则释放内存,并打印剩余内存信息
/**
******************************************************************************
* @file : user_mian.h
* @brief : V1.00
******************************************************************************
* @attention
*
******************************************************************************
*/
/* Include 包含---------------------------------------------------------------*/
#include "stm32f10x.h"
#include <stdbool.h>
#include "user_gpio.h"
#include "user_delay.h"
#include "user_rcc_config.h"
#include "user_uart.h"
#include "FreeRTOS.h"
#include "task.h"
#include "semphr.h"
#include "user_key.h"
/* Typedef 类型----------------------------------------------------------------*/
/* Define 定义----------------------------------------------------------------*/
/* Macro 宏------------------------------------------------------------------*/
/*二值信号量句柄*/
QueueHandle_t semphore_handle;
/* Variables 变量--------------------------------------------------------------*/
/* Constants 常量--------------------------------------------------------------*/
/* Function 函数--------------------------------------------------------------*/
//任务优先级
#define START_TASK_PRIO 1
//任务堆栈大小
#define START_STK_SIZE 128
//任务句柄
TaskHandle_t StartTask_Handler;
//任务函数
void start_task(void *pvParameters);
//任务优先级
#define TASK1_PRIO 2
//任务堆栈大小
#define TASK1_STK_SIZE 100
//任务句柄
TaskHandle_t Task1_Handler;
//任务函数
void task1(void *pvParameters);
int main(void)
{
/*配置系统中断分组为4位抢占*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);
/*延时函数初始化*/
delay_init();
/*RCC配置*/
Rcc_config();
/*GPIO初始化*/
Gpio_Init();
/*USART1初始化*/
Uart1_Init(9600);
/*创建开始任务*/
xTaskCreate((TaskFunction_t )start_task, //任务函数
(const char* )"start_task", //任务名称
(uint16_t )START_STK_SIZE, //任务堆栈大小
(void* )NULL, //传递给任务函数的参数
(UBaseType_t )START_TASK_PRIO, //任务优先级
(TaskHandle_t* )&StartTask_Handler); //任务句柄
vTaskStartScheduler(); //开启任务调度
}
/*!
\brief 开始任务函数
\param[in] 传递形参,创建任务时用户自己传入
\param[out] none
\retval none
*/
void start_task(void *pvParameters)
{
taskENTER_CRITICAL(); //进入临界区
//创建任务1
xTaskCreate((TaskFunction_t )task1,
(const char* )"task1",
(uint16_t )TASK1_STK_SIZE,
(void* )NULL,
(UBaseType_t )TASK1_PRIO,
(TaskHandle_t* )&Task1_Handler);
vTaskDelete(StartTask_Handler); //删除开始任务
taskEXIT_CRITICAL(); //退出临界区
}
/*!
\brief task1申请内存以及释放内存,并显示空闲内存大小
\param[in] 传递形参,创建任务时用户自己传入
\param[out] none
\retval none
*/
void task1(void *pvParameters)
{
uint8_t key = 0,t = 0;
uint8_t * buf =NULL;
while(1)
{
/*获取按键值*/
key = Key_Scan(0);
if(key == KEY0_PRES)
{
/*申请内存 */
buf = pvPortMalloc(30);
if(buf !=NULL)
{
printf("申请内存成功!\r\n");
}else
{
printf("申请内存失败!\r\n");
}
}else if(key == KEY1_PRES)
{
/*释放内存*/
if(buf != NULL)
{
vPortFree(buf);
printf("释放内存\r\n");
}
}
if(t++ > 5)
{
t = 0;
printf("剩余的空闲内存大小为%d\r\n",xPortGetFreeHeapSize());
}
vTaskDelay(100);
}
}
/************************************************************** END OF FILE ****/