文章目录
- Diffusion过程解析
- 前向过程
- 公式详解
- 每一步增加噪声的求解
- 从起始状态到最终状态的公式
- 反向过程
- 损失函数
- 总结公式
Diffusion过程解析
前向和后向相互独立,前向过程使用马尔科夫链实现,反向过程采用神经网络进行预测。
前向过程
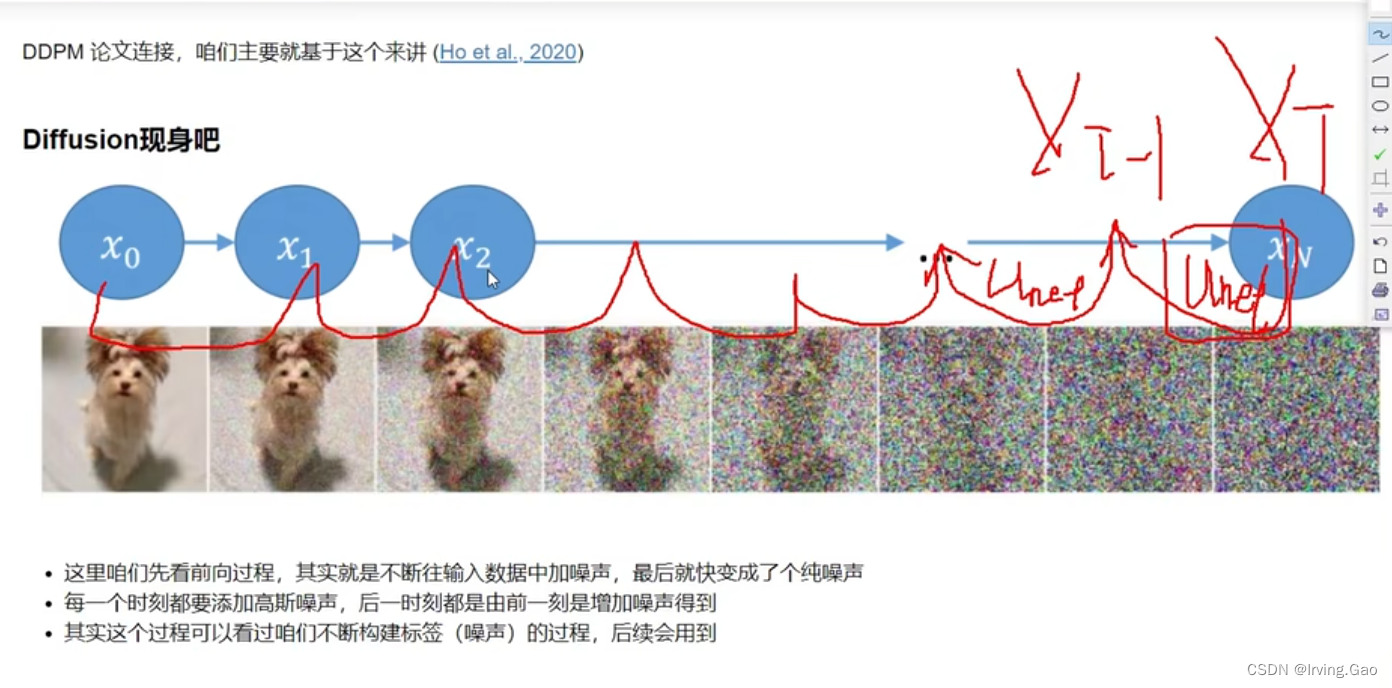
- 输入一个原始图片;
- 每一步添加噪声,噪声服从高斯分布(均值为0,方差为1,记作 N ( 0 , 1 ) N(0,1) N(0,1),服从正态分布);
- 最终得到一个只含有噪声的图像;
公式详解
每一步增加噪声的求解
X t = a t X t − 1 + 1 − a t ε t X_t = \sqrt{a_t} X_{t-1} + \sqrt{1-a_t} \varepsilon_t Xt=atXt−1+1−atεt
- X t X_t Xt是当前时刻的图像; X t − 1 X_{t-1} Xt−1是前一时刻的图像;
- a t a_t at是噪声权重,随着 t t t 的增加不断变化(论文中是从0.0001到0.02);
- ε t \varepsilon_t εt是指每个时刻添加的独立的高斯噪声。
从起始状态到最终状态的公式
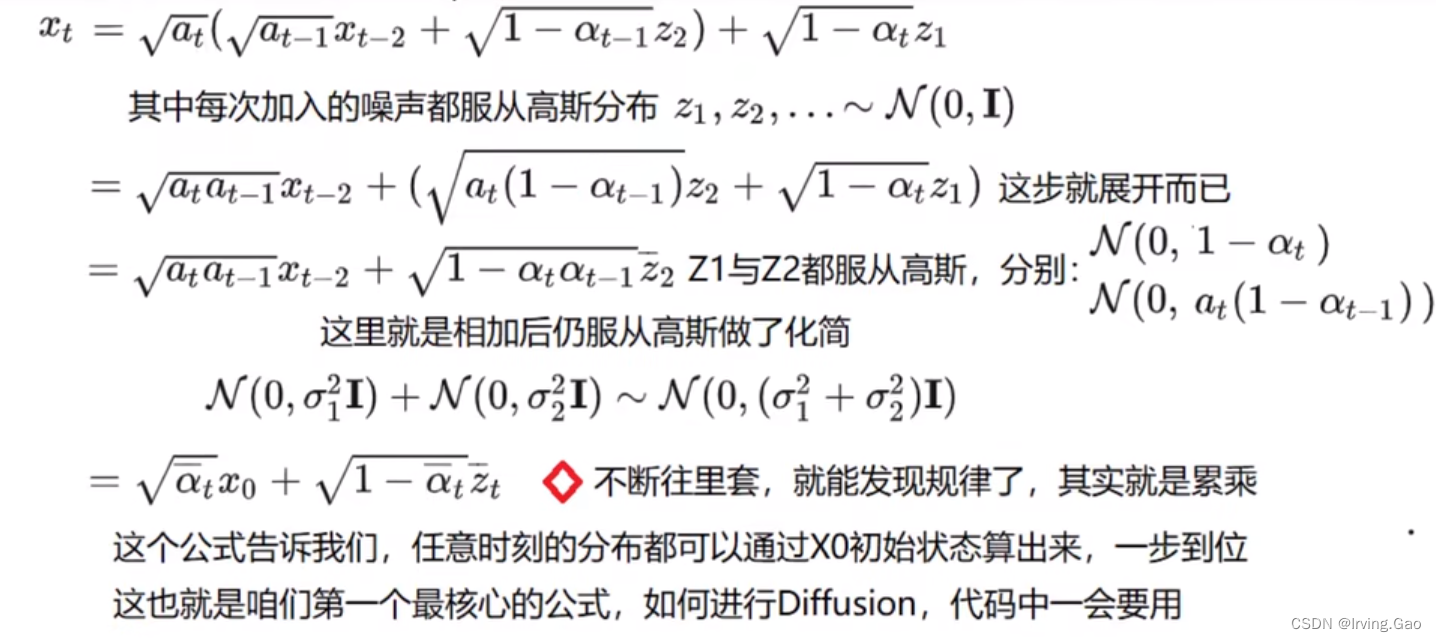
反向过程
反向过程是通过参数化的U-Net+Attention神经网络实现从噪声图像到原始图像的denoise。

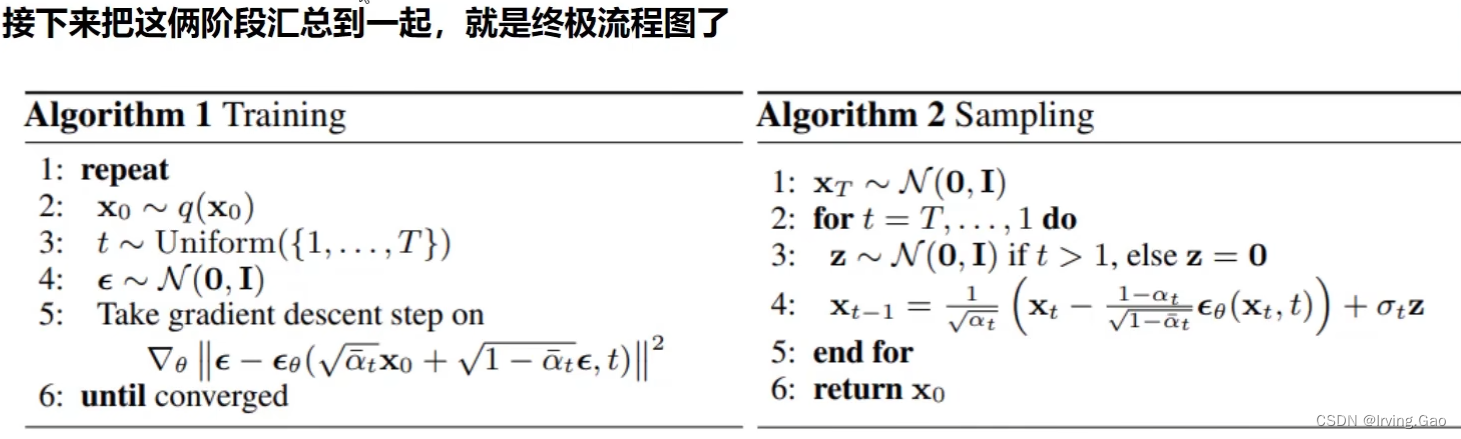
损失函数
最小化该公式:
∥ z ˉ t − z θ ( α ˉ t x 0 + 1 − α ˉ t z ˉ t , t ) ∥ \left\|\bar{z}_t-z_\theta\left(\sqrt{\bar{\alpha}_t} x_0+\sqrt{1-\bar{\alpha}_t} \bar{z}_t, t\right)\right\| zˉt−zθ(αˉtx0+1−αˉtzˉt,t)
- z ˉ t \bar{z}_t zˉt为 t t t 时刻的噪声真值;
- z θ z_\theta zθ为噪声预测值;
- α ˉ t \bar{\alpha}_t αˉt为噪声参数,和 t t t 有关;
总结公式
参考资料:
- 视频讲解:Diffusion Model:比“GAN"还要牛逼的图像生成模型!公式推导+论文精读,迪哥打你从零详解扩散模型!
代码资料
链接:https://pan.baidu.com/s/1P1WTZtr5UBLu9FVDXCk3nA?pwd=tuh4
提取码:tuh4
- 文字原理详解:由浅入深了解Diffusion Model
- 代码:https://github.com/zoubohao/DenoisingDiffusionProbabilityModel-ddpm-