Introduction to Multi-Armed Bandits——04 Thompson Sampling[2]
参考资料
-
Russo D J, Van Roy B, Kazerouni A, et al. A tutorial on thompson sampling[J]. Foundations and Trends® in Machine Learning, 2018, 11(1): 1-96.
-
ts_tutorial
项目代码地址: https://github.com/yijunquan-afk/bandit-learning.git
一、General Thompson Sampling
Thompson Sampling 可以有效应用于 Bernoulli bandit 以外的一系列在线决策问题,我们现在考虑一个更普适的设置。
-
假设智能体(
agent) 从集合 X \mathcal{X} X 选取一连串的动作(action) x 1 , x 2 , x 3 , ⋯ , x_1, x_2, x_3,\cdots, x1,x2,x3,⋯, 并应用于一个系统。 -
行动集可以是有限的,如
Bernoulli bandit,也可以是无限的。 -
在应用动作 x t x_t xt 之后,智能体观察到一个结果 y t y_t yt,这是由系统根据条件概率 q θ ( ⋅ ∣ x t ) q_\theta(\cdot | x_t) qθ(⋅∣xt) 随机生成的。
-
智能体获得奖励 r t = r ( y t ) r_t=r(y_t) rt=r(yt),其中 r r r 是一个已知的函数。 智能体最初不知道 θ \theta θ 的值,并使用先验分布 p p p 表示他的不确定性。
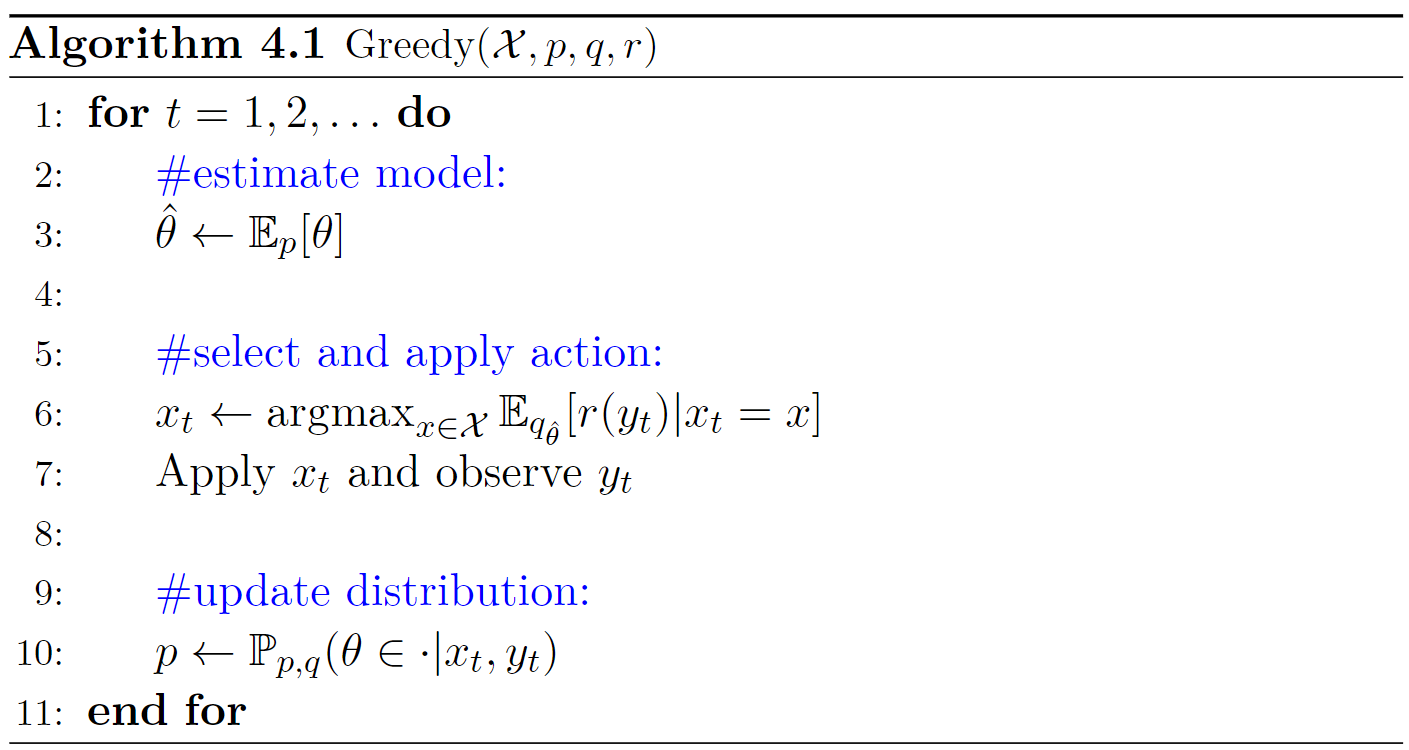
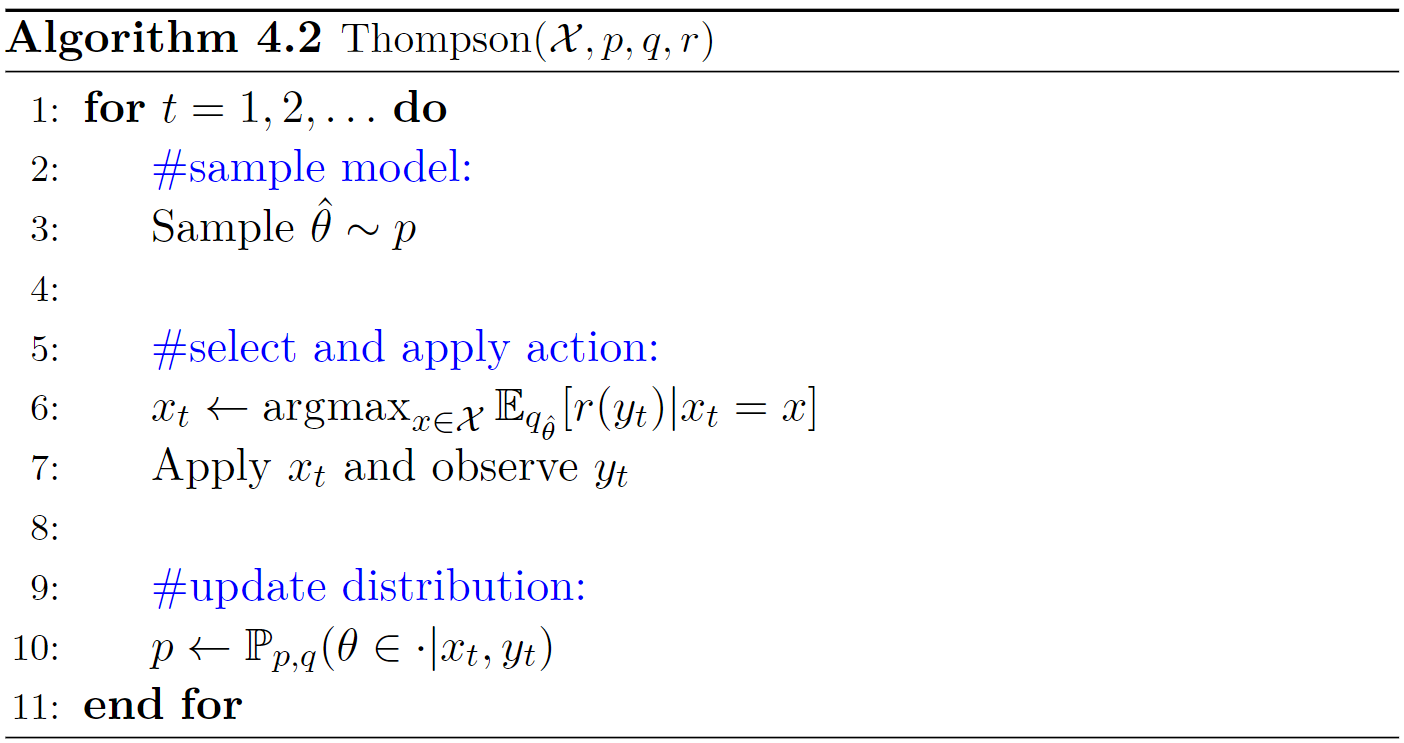
算法 4.1 和 4.2 以一种抽象的形式提出了贪心和TS方法,以适应这个更普适的设置。两者的区别在于它们生成模型参数 θ ^ \hat{\theta} θ^ 的方式。贪婪算法将 θ ^ \hat{\theta} θ^ 作为 θ \theta θ 相对于分布 p p p 的期望值,而TS从 p p p 中抽取一个随机样本。 然后,这两种算法都采取了使各自模型的预期奖励最大化的动作。
如果有一组有限的可能观测值
y
t
y_t
yt,这个期望值由以下公式给出
E
q
θ
^
[
r
(
y
t
)
∣
x
t
=
x
]
=
∑
o
q
θ
^
(
o
∣
x
)
r
(
o
)
(4.1)
\mathbb{E}_{q_{\hat{\theta}}}[r(y_t) | x_t = x] = \sum_o q_{\hat{\theta}}(o|x) r(o) \tag{4.1}
Eqθ^[r(yt)∣xt=x]=o∑qθ^(o∣x)r(o)(4.1)
分布
p
p
p 根据已实现的观测值
y
^
t
\hat{y}_t
y^t 的条件进行更新。 如果
θ
\theta
θ 被限制在一个有限的集合中,这个条件分布可以被贝叶斯规则写成
P
p
,
q
(
θ
=
u
∣
x
t
,
y
t
)
=
p
(
u
)
q
u
(
y
t
∣
x
t
)
∑
v
p
(
v
)
q
v
(
y
t
∣
x
t
)
(4.2)
\mathbb{P}_{p, q}(\theta = u | x_t, y_t) = \frac{p(u) q_u(y_t | x_t)}{\sum_v p(v) q_v(y_t | x_t)}\tag{4.2}
Pp,q(θ=u∣xt,yt)=∑vp(v)qv(yt∣xt)p(u)qu(yt∣xt)(4.2)
带有β先验的Bernoulli bandit是上述表述的一个特例。 在这种特殊情况下,动作的集合是
X
=
{
1
,
…
,
K
}
\mathcal{X} = \{1,\ldots,K\}
X={1,…,K},只有奖励被观察到,所以
y
t
=
r
t
y_t = r_t
yt=rt 。 观察和奖励是由条件概率
q
θ
(
1
∣
k
)
=
θ
k
q_\theta(1|k) = \theta_k
qθ(1∣k)=θk and
q
θ
(
0
∣
k
)
=
1
−
θ
k
q_\theta(0|k) = 1-\theta_k
qθ(0∣k)=1−θk 来模拟的。先验分布由向量
α
\alpha
α 和
β
\beta
β 决定。其概率密度函数为:
p
(
θ
)
=
∏
k
=
1
K
Γ
(
α
+
β
)
Γ
(
α
k
)
Γ
(
β
k
)
θ
k
α
k
−
1
(
1
−
θ
k
)
β
k
−
1
p(\theta) = \prod_{k=1}^K \frac{\Gamma(\alpha+\beta)}{\Gamma(\alpha_k)\Gamma(\beta_k)} \theta_k^{\alpha_k-1} (1-\theta_k)^{\beta_k-1}
p(θ)=k=1∏KΓ(αk)Γ(βk)Γ(α+β)θkαk−1(1−θk)βk−1
换句话说,在先验分布下, θ \theta θ 的组成部分是独立的,并且是β分布的,参数为 α \alpha α 和 β \beta β。
对于这个问题,贪心算法(算法4.1)和TS算法(算法4.2})在每个 t t t 的迭代中,对于 k ∈ { 1 , ⋯ , K } k \in \{1,\cdots,K\} k∈{1,⋯,K} 的后验参数以 ( α k , β k ) (\alpha_k,\beta_k) (αk,βk) 开始。 贪心算法将 θ ^ k \hat{\theta}_k θ^k 设定为期望, E p [ θ k ] = α k / ( α k + β k ) \mathbb{E}_p[\theta_k] = \alpha_k/(\alpha_k+\beta_k) Ep[θk]=αk/(αk+βk),而TS从参数为 ( α k , β k ) (\alpha_k,\beta_k) (αk,βk) 的beta分布中随机抽取 θ ^ k \hat{\theta}_k θ^k 。然后,每个算法都会选择使 E q θ ^ [ r ( y t ) ∣ x t = x ] = θ ^ x \mathbb{E}_{q_{\hat{\theta}}}[r(y_t) | x_t = x] = \hat{\theta}_x Eqθ^[r(yt)∣xt=x]=θ^x 达到最大的动作 x x x。在应用选定的动作后,观察到奖励 r t = y t r_t = y_t rt=yt ,并根据以下原则更新分布参数
( α , β ) ← ( α + r t 1 x t , β + ( 1 − r t ) 1 x t ) (\alpha, \beta) \leftarrow (\alpha + r_t {\bf 1}_{x_t}, \beta + (1-r_t) {\bf 1}_{x_t}) (α,β)←(α+rt1xt,β+(1−rt)1xt)
其中 1 x t {\bf 1}_{x_t} 1xt是一个分量 x t x_t xt 等于 1 1 1,所有其他分量等于 0 0 0 的向量。
算法4.1和算法4.2还可以应用在更复杂的场景,让我们来看看最短路问题。
二、在线最短路问题
2.1 问题描述
一个人每天早上往返于家与单位之间。她想沿着平均遍历时间最少的路通勤,但她不确定不同路线的遍历时间。她该如何有效地学习,并在大量的遍历中尽量减少总遍历时间?
对于最短路问题,模型构建如下:
-
一个图 G = ( V , E ) G = (V, E) G=(V,E) , N N N 个点 V = { 1 , … , N } V = \{1,\ldots, N\} V={1,…,N},边 E E E 以及平均遍历时间(
mean travel times) θ ∈ R N \theta \in \mathbb{R}^{N} θ∈RN。 -
点 1 1 1 是起点,点 N N N 是终点。
-
一个动作是一连串从起点到终点的不同边。
-
采取一个动作 x t x_t xt 以后,对于每一个经过的边 e ∈ x t e \in x_t e∈xt,智能体观察到一个遍历时间 y t , e y_{t,e} yt,e,该遍历时间是从具有平均值 θ e \theta_e θe 的分布中独立抽样得到的。
-
遍历过程中,智能体产生消耗 ∑ e ∈ x t y t , e \sum_{e \in x_t} y_{t,e} ∑e∈xtyt,e,于是奖励可以量化为 r t = − ∑ e ∈ x t y t , e r_t = -\sum_{e \in x_t} y_{t,e} rt=−∑e∈xtyt,e。
2.2 Independent Travel Times
考虑先验分布:
θ
e
\theta_e
θe 是独立的与log-Gaussian-distributed(参数为
μ
e
\mu_e
μe 和
σ
e
2
\sigma_e^2
σe2)。也就是说,
ln
(
θ
e
)
∼
N
(
μ
e
,
σ
e
2
)
\ln(\theta_e) \sim N(\mu_e, \sigma_e^2)
ln(θe)∼N(μe,σe2) 是高斯分布。因此,
E
[
θ
e
]
=
e
μ
e
+
σ
e
2
/
2
\mathbb{E}[\theta_e] = e^{\mu_e + \sigma_e^2/2}
E[θe]=eμe+σe2/2。此外,我们认为
y
t
,
e
∣
θ
y_{t,e}|\theta
yt,e∣θ 在各个边
e
∈
E
e \in E
e∈E 上是独立的,并且是对数高斯分布,参数为
ln
(
θ
e
)
−
σ
~
2
/
2
\ln(\theta_e) - \tilde{\sigma}^2/2
ln(θe)−σ~2/2 和
σ
~
2
\tilde{\sigma}^2
σ~2,因此
E
[
y
t
,
e
∣
θ
e
]
=
θ
e
\mathbb{E}[y_{t,e}|\theta_e] = \theta_e
E[yt,e∣θe]=θe。 共轭特性适应于在观察
y
t
,
e
y_{t,e}
yt,e 时更新
θ
e
\theta_e
θe 分布:
( μ e , σ e 2 ) ← ( 1 σ e 2 μ e + 1 σ ~ 2 ( ln ( y t , e ) + σ ~ 2 2 ) 1 σ e 2 + 1 σ ~ 2 , 1 1 σ e 2 + 1 σ ~ 2 ) (4.3) (\mu_e, \sigma_e^2) \leftarrow \left(\frac{\frac{1}{\sigma_e^2} \mu_e + \frac{1}{\tilde{\sigma}^2} \left(\ln(y_{t,e}) +\frac{\tilde{\sigma}^2}{2}\right)}{\frac{1}{\sigma_e^2} + \frac{1}{\tilde{\sigma}^2}}, \frac{1}{\frac{1}{\sigma_e^2} + \frac{1}{\tilde{\sigma}^2}}\right) \tag{4.3} (μe,σe2)← σe21+σ~21σe21μe+σ~21(ln(yt,e)+2σ~2),σe21+σ~211 (4.3)
对于先验分布和后验分布属于同类别的分布,则先验与后验称为共轭分布,而先验分布被称为似然函数的共轭先验。
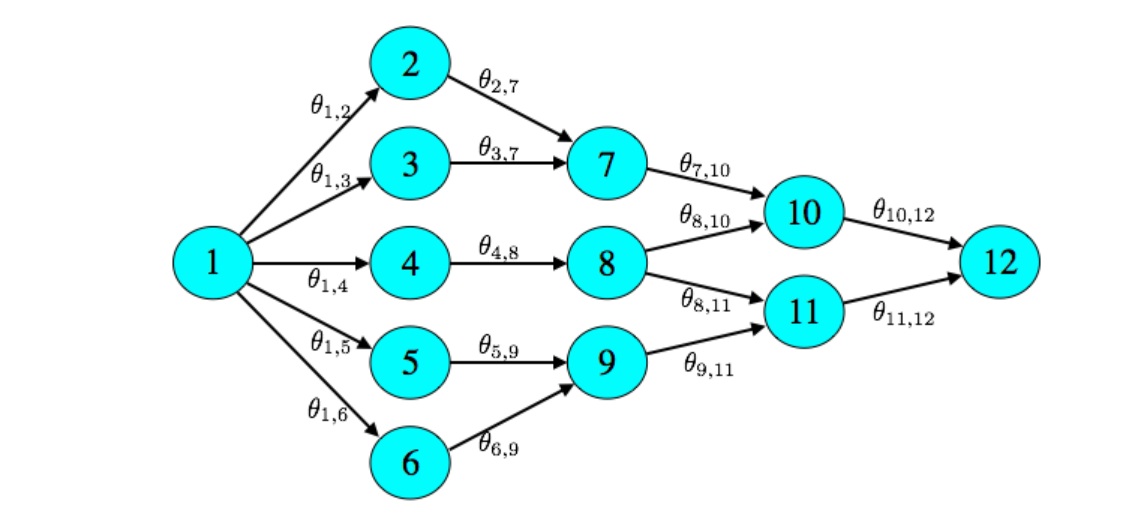
让我们用一个例子进行具体的说明:考虑到一个人每天从家到公司。假设可能的路径用图 G = ( V , E ) G = (V, E) G=(V,E) 表示,同时假设这个人知道每个边 e ∈ E e \in E e∈E 边的遍历距离 d e d_e de,但是对平均遍历时间不确定。对他来说,构建一个期望等于遍历距离的先验是很自然的。对于对数高斯先验,可以通过设置 μ e = ln ( d e ) − σ e 2 / 2 \mu_e = \ln(d_e) -\sigma_e^2/2 μe=ln(de)−σe2/2来实现。此时, E [ θ e ] = d e \mathbb{E}[\theta_e] = d_e E[θe]=de。参数 μ e \mu_e μe 和 σ e 2 \sigma_e^2 σe2 也表达了不确定性的程度;一条边的平均遍历时间的先验方差是 ( e σ e 2 − 1 ) d e 2 (e^{\sigma_e^2}-1) d_e^2 (eσe2−1)de2。对数正态分布。
算法4.1和4.2可以应用在最短路问题上。在每个 t t t 的迭代中,对于 e ∈ E e \in E e∈E 的后验参数以 ( μ e , σ e ) (\mu_e,\sigma_e) (μe,σe) 开始。 贪心算法将 θ ^ e \hat{\theta}_e θ^e 设定为期望, E p [ θ e ] = e μ e + σ e 2 / 2 \mathbb{E}_p[\theta_e] = e^{\mu_e + \sigma_e^2/2} Ep[θe]=eμe+σe2/2,而TS从参数为 μ e \mu_e μe 和 σ e 2 \sigma_e^2 σe2 的对数高斯分布中随机抽取 θ ^ e \hat{\theta}_e θ^e 。然后,每个算法都会选择使 E q θ ^ [ r ( y t ) ∣ x t = x ] = − ∑ e ∈ x t θ ^ e \mathbb{E}_{q_{\hat{\theta}}}[r(y_t) | x_t = x] = -\sum_{e \in x_t} \hat{\theta}_e Eqθ^[r(yt)∣xt=x]=−∑e∈xtθ^e 达到最大的动作 x x x。在应用选定的动作后,观察到输出 y t y_t yt ,并根据公式4.3更新分布参数 ( μ e , σ e 2 ) (\mu_e, \sigma_e^2) (μe,σe2) 。
代码实现与分析
图使用binomial bridge的形式。有20层,所以从源头到目的地有184,756条路径。先验参数设置为
μ
e
=
−
1
2
\mu_e = -\frac{1}{2}
μe=−21 和
σ
e
2
=
1
\sigma_e^2 = 1
σe2=1 ,于是
E
[
θ
e
]
=
1
\mathbb{E}[\theta_e] = 1
E[θe]=1 ,
e
∈
E
e \in E
e∈E,以及条件分布参数为
σ
~
2
=
1
\tilde{\sigma}^2 = 1
σ~2=1。每个数据点代表了一万次独立模拟的平均值。
实现Dijkstra单源最短路算法:
from __future__ import generators
class priorityDictionary(dict):
def __init__(self):
'''Initialize priorityDictionary by creating binary heap of
pairs (value,key). Note that changing or removing a dict entry
will not remove the old pair from the heap until it is found by
smallest() or until the heap is rebuilt.'''
self.__heap = []
dict.__init__(self)
def smallest(self):
'''Find smallest item after removing deleted items from front of
heap.'''
if len(self) == 0:
raise IndexError("smallest of empty priorityDictionary")
heap = self.__heap
while heap[0][1] not in self or self[heap[0][1]] != heap[0][0]:
lastItem = heap.pop()
insertionPoint = 0
while 1:
smallChild = 2 * insertionPoint + 1
if smallChild + 1 < len(heap) and \
heap[smallChild] > heap[smallChild + 1]:
smallChild += 1
if smallChild >= len(heap) or lastItem <= heap[smallChild]:
heap[insertionPoint] = lastItem
break
heap[insertionPoint] = heap[smallChild]
insertionPoint = smallChild
return heap[0][1]
def __iter__(self):
'''Create destructive sorted iterator of priorityDictionary.'''
def iterfn():
while len(self) > 0:
x = self.smallest()
yield x
del self[x]
return iterfn()
def __setitem__(self, key, val):
'''Change value stored in dictionary and add corresponding pair
to heap. Rebuilds the heap if the number of deleted items gets
large, to avoid memory leakage.'''
dict.__setitem__(self, key, val)
heap = self.__heap
if len(heap) > 2 * len(self):
self.__heap = [(v, k) for k, v in self.items()]
self.__heap.sort()
# builtin sort probably faster than O(n)-time heapify
else:
newPair = (val, key)
insertionPoint = len(heap)
heap.append(None)
while insertionPoint > 0 and \
newPair < heap[(insertionPoint - 1) // 2]:
heap[insertionPoint] = heap[(insertionPoint - 1) // 2]
insertionPoint = (insertionPoint - 1) // 2
heap[insertionPoint] = newPair
def setdefault(self, key, val):
'''Reimplement setdefault to pass through our customized __setitem__.'''
if key not in self:
self[key] = val
return self[key]
def Dijkstra(G,start,end=None):
D = {} # dictionary of final distances
P = {} # dictionary of predecessors
Q = priorityDictionary() # est.dist. of non-final vert.
Q[start] = 0
for v in Q:
D[v] = Q[v]
if v == end: break
for w in G[v]:
vwLength = D[v] + G[v][w]
if w in D:
if vwLength < D[w]:
raise ValueError("Dijkstra: found better path to already-final vertex")
elif w not in Q or vwLength < Q[w]:
Q[w] = vwLength
P[w] = v
return (D,P)
def shortestPath(G,start,end):
D,P = Dijkstra(G,start,end)
Path = []
while 1:
Path.append(end)
if end == start: break
end = P[end]
Path.reverse()
return Path
再来看环境(environment):
import numpy as np
from base.environment import Environment
from collections import defaultdict
from graph.dijkstra import Dijkstra
class IndependentBinomialBridge(Environment):
"""Graph shortest path on a binomial bridge.
The agent proceeds up/down for n_stages, but must end with equal ups/downs.
e.g. (0, 0) - (1, 0) - (2, 0) for n_stages = 2
\ /
(1, 1)
We label nodes (x, y) for x=0, 1, .., n_stages and y=0, .., y_lim
y_lim = x + 1 if x < n_stages / 2 and then decreases again appropriately.
"""
def __init__(self, n_stages, mu0, sigma0, sigma_tilde=1.):
"""
graph[node1][node2] 表示node1 和 node2之间的边距
Args:
n_stages: 阶段数必须为偶数
mu0: 独立分布的边的先验均值
sigma0: 独立分布的边的先验标准差
sigma_tilde: 标准差的观察噪声
"""
assert (n_stages % 2 == 0)
self.n_stages = n_stages
self.mu0 = mu0
self.sigma0 = sigma0
self.sigma_tilde = sigma_tilde
self.nodes = set()
self.graph = defaultdict(dict)
self.optimal_reward = None # 当我们计算最短路径时填充
self._create_graph()
_ = self.get_shortest_path()
def get_observation(self):
"""这里的观察值是阶段数"""
return self.n_stages
def _get_width_bridge(self, x):
"""在阶段x时计算bridge的宽度
Args:
x: 阶段数
"""
depth = x - 2 * np.maximum(x - self.n_stages / 2, 0) + 1
return int(depth)
def _create_graph(self):
"""随机初始化图"""
# 初始化结点
for x in range(self.n_stages + 1):
for y in range(self._get_width_bridge(x)):
node = (x, y)
self.nodes.add(node)
# 添加边
for x in range(self.n_stages + 1):
for y in range(self._get_width_bridge(x)):
node = (x, y)
# 右上的结点
right_up = (x + 1, y - 1)
# 正右的结点
right_equal = (x + 1, y)
# 右下的结点
right_down = (x + 1, y + 1)
if right_down in self.nodes:
distance = np.exp(
# np.random.randn: 返回一个或一组服从标准正态分布的随机样本值。
self.mu0 + self.sigma0 * np.random.randn())
self.graph[node][right_down] = distance
if right_equal in self.nodes:
distance = np.exp(
self.mu0 + self.sigma0 * np.random.randn())
self.graph[node][right_equal] = distance
if right_up in self.nodes and right_equal not in self.nodes:
# 向上走
distance = np.exp(
self.mu0 + self.sigma0 * np.random.randn())
self.graph[node][right_up] = distance
def overwrite_edge_length(self, edge_length):
"""用确切的值覆盖原先的边长
Args:
edge_length: edge_length[start_node][end_node] = distance
"""
for start_node in edge_length:
for end_node in edge_length[start_node]:
self.graph[start_node][end_node] = edge_length[start_node][end_node]
def get_shortest_path(self):
"""找到最短路
Returns:
path: 遍历的结点列表
"""
start = (0, 0)
end = (self.n_stages, 0)
# 使用Dijkstra方法找到最短路
final_distance, predecessor = Dijkstra(self.graph, start, end)
path = []
iter_node = end
while True:
path.append(iter_node)
if iter_node == start:
break
iter_node = predecessor[iter_node]
path.reverse()
# 更新最优奖励
self.optimal_reward = -final_distance[end]
return path
def get_optimal_reward(self):
return self.optimal_reward
def get_expected_reward(self, path):
"""给定一个路径,获取奖励
Args:
path: 结点列表
Returns:
expected_reward: -路长
"""
expected_distance = 0
# zip()是Python的一个内建函数,它接受一系列可迭代的对象作为参数,
# 将对象中对应的元素打包成一个个tuple(元组),
# 然后返回由这些tuples组成的list(列表)。
for start_node, end_node in zip(path, path[1:]):
expected_distance += self.graph[start_node][end_node]
return -expected_distance
def get_stochastic_reward(self, path):
time_elapsed = defaultdict(dict)
for start_node, end_node in zip(path, path[1:]):
mean_time = self.graph[start_node][end_node]
lognormal_mean = np.log(mean_time) - 0.5 * self.sigma_tilde**2
stoch_time = np.exp(
lognormal_mean + self.sigma_tilde * np.random.randn())
time_elapsed[start_node][end_node] = stoch_time
return time_elapsed
接下来设计智能体。
import copy
import random
class IndependentBBEpsilonGreedy():
"""Independent Binomial Bridge Epsilon Greedy"""
def __init__(self, n_stages, mu0, sigma0, sigma_tilde, epsilon=0.0):
"""An agent for graph bandits.
Args:
n_stages: binomial bridge的阶段数 (必须是偶数)
mu0: 先验的平均值
sigma0: 先验的标准差
sigma_tilde: 观察值的噪声
epsilon: 用于选择的参数
"""
assert (n_stages % 2 == 0)
self.n_stages = n_stages
self.mu0 = mu0
self.sigma0 = sigma0
self.sigma_tilde = sigma_tilde
self.epsilon = epsilon
# 使用任意初始值设置内部环境
self.internal_env = IndependentBinomialBridge(n_stages, mu0, sigma0)
# 将边的后验保存为后验belief的元组(mean, std)
self.posterior = copy.deepcopy(self.internal_env.graph)
for start_node in self.posterior:
for end_node in self.posterior[start_node]:
self.posterior[start_node][end_node] = (mu0, sigma0)
def get_posterior_mean(self):
"""获得每条边的后验均值
Returns:
edge_length: edge_length[start_node][end_node] = distance
"""
edge_length = copy.deepcopy(self.posterior)
for start_node in self.posterior:
for end_node in self.posterior[start_node]:
mean, std = self.posterior[start_node][end_node]
edge_length[start_node][end_node] = np.exp(mean + 0.5 * std**2)
return edge_length
def get_posterior_sample(self):
"""获得每条边的后验抽样
Return:
edge_length: edge_length[start_node][end_node] = distance
"""
edge_length = copy.deepcopy(self.posterior)
for start_node in self.posterior:
for end_node in self.posterior[start_node]:
mean, std = self.posterior[start_node][end_node]
edge_length[start_node][end_node] = np.exp(mean + std * np.random.randn())
return edge_length
def update_observation(self, observation, action, reward):
"""为binomial bridge更新观察值.
Args:
observation: 阶段数
action: 智能体选择的路(未使用)
reward: reward[start_node][end_node] = stochastic_time
"""
assert observation == self.n_stages
for start_node in reward:
for end_node in reward[start_node]:
y = reward[start_node][end_node]
old_mean, old_std = self.posterior[start_node][end_node]
# 转换精度,便于计算
old_precision = 1. / (old_std**2)
noise_precision = 1. / (self.sigma_tilde**2)
new_precision = old_precision + noise_precision
new_mean = (noise_precision * (np.log(y) + 0.5 /
noise_precision) + old_precision * old_mean) / new_precision
new_std = np.sqrt(1. / new_precision)
# 更新后验值
self.posterior[start_node][end_node] = (new_mean, new_std)
def _pick_random_path(self):
"""在bridge中完全随机地选择一条路径"""
path = []
start_node = (0, 0)
while True:
path += [start_node]
if start_node == (self.n_stages, 0):
break
start_node = random.choice(list(self.posterior[start_node].keys()))
return path
def pick_action(self, observation):
"""贪心地选择后验均值的最短路径"""
if np.random.rand() < self.epsilon:
path = self._pick_random_path()
else:
posterior_means = self.get_posterior_mean()
self.internal_env.overwrite_edge_length(posterior_means)
path = self.internal_env.get_shortest_path()
return path
class IndependentBBTS(IndependentBBEpsilonGreedy):
"""Independent Binomial Bridge Thompson Sampling"""
def pick_action(self, observation):
"""从后验中抽样"""
posterior_sample = self.get_posterior_sample()
self.internal_env.overwrite_edge_length(posterior_sample)
path = self.internal_env.get_shortest_path()
return path
设置实验,不需要管action。
from base.experiment import BaseExperiment
class ExperimentNoAction(BaseExperiment):
def run_step_maybe_log(self, t):
# 观察环境,选择臂
observation = self.environment.get_observation()
action = self.agent.pick_action(observation)
# 计算有用的值
optimal_reward = self.environment.get_optimal_reward()
expected_reward = self.environment.get_expected_reward(action)
reward = self.environment.get_stochastic_reward(action)
# 使用获得的奖励和选择的臂更新智能体
self.agent.update_observation(observation, action, reward)
# 记录需要的值
instant_regret = optimal_reward - expected_reward
self.cum_optimal += optimal_reward
self.cum_regret += instant_regret
# 环境进化(非平稳实验中才会用到)
self.environment.advance(action, reward)
self.data_dict = {'t': (t + 1),
'instant_regret': instant_regret,
'cum_regret': self.cum_regret,
'cum_optimal': self.cum_optimal,
'unique_id': self.unique_id}
self.results.append(self.data_dict)
跑一下书上的例图。这里的试验次数设置为200次,书中的是跑了5000次的结果。
import pandas as pd
import plotnine as gg
def generateTSAgent(n_steps, n_stages, mu0, sigma0, sigma_tilde, jobs):
results = []
for job_id in range(jobs):
agent = IndependentBBTS(n_stages, mu0, sigma0, sigma_tilde)
# 初始化环境,产生图
env = IndependentBinomialBridge(n_stages, mu0, sigma0, sigma_tilde)
experiment = ExperimentNoAction(agent, env, n_steps=n_steps, seed=job_id, unique_id=str(job_id))
experiment.run_experiment()
results.append(experiment.results)
df_agent = (pd.concat(results)).assign(agent='TS')
return df_agent
def generateEpsilonAgent(n_steps, n_stages, mu0, sigma0, sigma_tilde, jobs, epsilon=0):
results = []
for job_id in range(jobs):
agent = IndependentBBEpsilonGreedy(
n_stages, mu0, sigma0, sigma_tilde, epsilon)
env = IndependentBinomialBridge(n_stages, mu0, sigma0, sigma_tilde)
experiment = ExperimentNoAction(
agent, env, n_steps=n_steps, seed=job_id, unique_id=str(job_id))
experiment.run_experiment()
results.append(experiment.results)
df_agent = (pd.concat(results)).assign(agent='greedy-'+str(epsilon))
return df_agent
def generateAgents():
n_stages = 20
n_steps = 500
mu0 = -0.5
sigma0 = 1
sigma_tilde = 1
N_JOBS = 200
agents = []
agents.append(generateEpsilonAgent(
n_steps, n_stages, mu0, sigma0, sigma_tilde, N_JOBS))
agents.append(generateEpsilonAgent(n_steps, n_stages, mu0,
sigma0, sigma_tilde, N_JOBS, epsilon=0.01))
agents.append(generateEpsilonAgent(n_steps, n_stages, mu0,
sigma0, sigma_tilde, N_JOBS, epsilon=0.05))
agents.append(generateEpsilonAgent(n_steps, n_stages, mu0,
sigma0, sigma_tilde, N_JOBS, epsilon=0.1))
agents.append(generateTSAgent(n_steps, n_stages,
mu0, sigma0, sigma_tilde, N_JOBS))
df_agents = pd.concat(agents)
return df_agents
def plotCompare1():
df_agents = generateAgents()
plt_df = (df_agents.groupby(['t', 'agent'])
.agg({'instant_regret': np.mean})
.reset_index())
p = (gg.ggplot(plt_df)
+ gg.aes('t', 'instant_regret', colour='agent')
+ gg.geom_line(size=1.25, alpha=0.75)
+ gg.xlab('time period (t)')
+ gg.ylab('per-period regret')
+ gg.scale_colour_brewer(name='agent', type='qual', palette='Set1'))
print(p)
def plotCompare2():
df_agents = generateAgents()
df_agents['cum_ratio'] = (df_agents.cum_optimal - df_agents.cum_regret) / df_agents.cum_optimal
plt_df = (df_agents.groupby(['t', 'agent'])
.agg({'cum_ratio': np.mean})
.reset_index())
p = (gg.ggplot(plt_df)
+ gg.aes('t', 'cum_ratio', colour='agent')
+ gg.geom_line(size=1.25, alpha=0.75)
+ gg.xlab('time period (t)')
+ gg.ylab('Total distance / optimal')
+ gg.scale_colour_brewer(name='agent', type='qual', palette='Set1')
+ gg.aes(ymin=1)
+ gg.geom_hline(yintercept=1, linetype='dashed', size=2, alpha=0.5))
print(p)
plotCompare1()
plotCompare2()
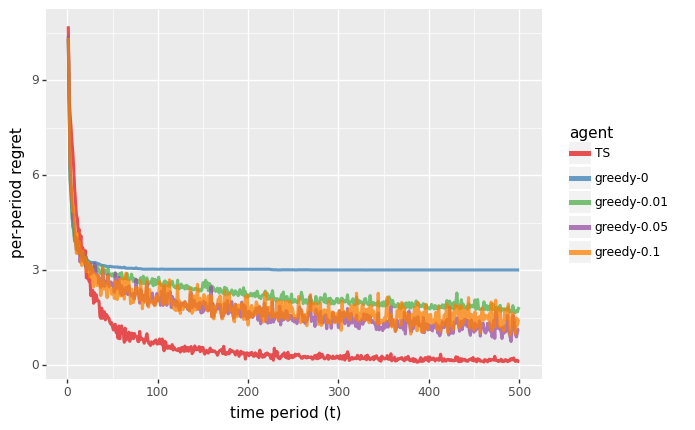
上图展示了应用贪心和TS算法处理最短路问题的结果。
悔值图表明,TS的性能很快就会收敛到最佳状态,而贪心算法却远非如此。我们通过改变 ϵ \epsilon ϵ,来查看 e p s i l o n − G r e e d y epsilon-Greedy epsilon−Greedy 算法的实验结果。对于每一次遍历。该算法会以 1 − ϵ 1-\epsilon 1−ϵ 的概率选择一条由贪心算法产生的路径(exploit),剩下则随机选择一条路径(explore)。虽然这种形式的探索是有帮助的,但图中显示,学习的速度远比TS慢。 这是因为 e p s i l o n − G r e e d y epsilon-Greedy epsilon−Greedy 在选择探索路径方面并不明智。TS会将探索努力引向信息丰富的路径,而不是完全随机的路径。
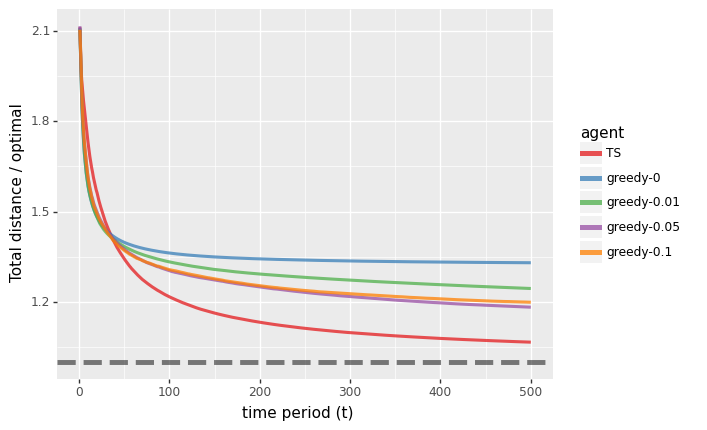
第二幅图表明,TS会以较快时间收敛到最优路径。 对于 e p s i l o n − G r e e d y epsilon-Greedy epsilon−Greedy 方法来说,情况就不是这样了。





![[基础]qml基础控件](https://img-blog.csdnimg.cn/img_convert/6b47376f6bbc4d91ab9e5fcd754009b0.png)
![流批一体计算引擎-6-[Flink]的Python DataStream API程序](https://img-blog.csdnimg.cn/09f7fe17a88b4fd598e88b2eb3b9b9cb.png)