原文连接:知乎《使用Python调用Gurobi求解PDPTW问题(Li & Lim’s benchmark)》
分析文章:
文章目录
- 修改
- utlis.py
- test.py
- 运行DataPath="lc101.txt"
修改
以及修改公示约束(8)与代码不符合的问题。
约束(8)
添加depot的时间窗口约束,添加节点的时间窗口约束.这里的V包含depot和节点.depot的id为0.
∀
i
∈
V
,
∀
k
∈
K
\forall i \in V, \forall k \in K
∀i∈V,∀k∈K,
e
i
≤
B
i
q
≤
l
i
e_i \leq B_i^q \leq l_i
ei≤Biq≤li
# 约束(8)depot和customer的时间窗约束
for k in Pro.Vehicles.keys():
# 两个depot的时间窗约束
model.addConstr(b[0, k] >= Pro.TimeWindow[0][0])
model.addConstr(b[0, k] <= Pro.TimeWindow[0][1])
model.addConstr(b[node_num - 1, k] >= Pro.TimeWindow[node_num - 1][0])
model.addConstr(b[node_num - 1, k] <= Pro.TimeWindow[node_num - 1][1])
model.addConstr(b[1, k] >= Pro.TimeWindow[1][0])
#节点的时间窗口约束
for i in range(node_num):
model.addConstr(b[i,k] >= Pro.TimeWindow[i][0])
model.addConstr(b[i,k] <= Pro.TimeWindow[i][1])
当depot不分为depot_start和depot_end的时候,修改为:
for k in Pro.Vehicles.keys():
for i in range(node_num):
model.addConstr(b[i,k] >= Pro.TimeWindow[i][0])
model.addConstr(b[i,k] <= Pro.TimeWindow[i][1])
现在代码可以分为两篇:utlis.py和test.py
utlis.py
- class Pro():用于存储本问题的相关信息
- def read_txt_data(DataPath,Pro):读取车辆信息,并将结果放入Pro
- def calculate_euclid_distance(x1, y1, x2, y2):定义了两个节点的距离公示
- def Construct_DisTime_Matrix(Pro):计算任意两个节点的距离矩阵(与车辆无关)和时间矩阵(含车辆)
- def build_model(Pro):建立PDPTW的问题模型
from gurobipy import *
import numpy as np
import pandas as pd
import math
import random
import time
class Pro():
def __init__(self):
self.Vehicles={} #用于存放车辆,适用于单depot的情况
#self.Depots={}#用于存放depot,使用于多depot的情况。{d1:{车辆集1},d2:{车辆集2},...}
self.Locations={}
self.Demand={}
self.TimeWindow={}
self.ServiceTime={}
self.Request={}
self.node_num=None
self.veh_num=None
self.pair_num=None #成对约束的数量
self.EarliestTime=None##depot的服务的最早时间
self.LatestTime=None #depot的服务的最晚时间
self.DistanceMatrix={}#用于存放节点(包括depot和需求节点)彼此之间的距离
self.LongestDistance=None #最大节点间的距离
self.TimeMatrix={}
def read_txt_data(DataPath,Pro):
# 读取车辆信息u
VehiclesInfo = pd.read_table(DataPath, nrows=1, names=['K', 'C', 'S'])
for i in range(int(VehiclesInfo.iloc[0, 0])):
Pro.Vehicles[i] = [VehiclesInfo.iloc[0, 1], VehiclesInfo.iloc[0, 2]] # 键i=车辆的序号,值为[车辆容量、速度]
Pro.veh_num=len(Pro.Vehicles)
# 读取Depot和任务信息
ColumnNames = ['TaskNo', 'X', 'Y', 'Demand', 'ET', 'LT', 'ST', 'PI', 'DI']
# [任务标号,x坐标,y坐标,需求任务]
TaskData = pd.read_table(DataPath, skiprows=[0], names=ColumnNames, index_col='TaskNo')
# 提取Depot和取送货点(Customer)的位置坐标 Locations
Pro.node_num = TaskData.shape[0]
for i in range(Pro.node_num):
if i not in Pro.Locations.keys():
Pro.Locations[i] = [TaskData.iloc[i, 0], TaskData.iloc[i, 1]] # 键为depot或客户编号,值为相应的坐标(x,y)
# 提取Depot和取送货点的Demand
for i in range(Pro.node_num):
if i not in Pro.Demand.keys():
Pro.Demand[i] = TaskData.iloc[i, 2]
# 提取Depot和取送货点的最早和最晚取送货时间及时间窗
Pro.EarliestTime = TaskData.sort_values(by='ET').iloc[0, 3]
Pro.LatestTime = TaskData.sort_values(by='LT', ascending=False).iloc[0, 4]
for i in range(Pro.node_num):
if i not in Pro.TimeWindow.keys():
Pro.TimeWindow[i] = [TaskData.iloc[i, 3], TaskData.iloc[i, 4]]
# 提取Depot和取送货点的服务时间ServiceTime
for i in range(Pro.node_num):
if i not in Pro.ServiceTime.keys():
Pro.ServiceTime[i] = TaskData.iloc[i, 5]
# 提取运输Request
# 对于取货任务,PICKUP索引为0,而同一行的DELIVERY索引给出相应送货任务的索引
count = 0 # 记录运输需求的数量
for i in range(1, Pro.node_num - 1):
if TaskData.iloc[i, 6] == 0:
Pro.Request[count] = [i, TaskData.iloc[i, 7]] # 将取送货点组合在一起,键为count,值为[取货点,送货点]
count += 1
Pro.pair_num=count
def calculate_euclid_distance(x1, y1, x2, y2):
""" 计算Euclid距离.
具体描述:计算两点(x1, y1), (x2, y2)之间的Euclid距离.
"""
EuclidDistance = math.sqrt((x2-x1)**2 + (y2-y1)**2)
return EuclidDistance
def Construct_DisTime_Matrix(Pro):
#获得两个节点之间距离和时间距离
Locations=Pro.Locations
for i in Locations.keys():
for j in Locations.keys():
if i != j:
Pro.DistanceMatrix[i, j] = calculate_euclid_distance(Locations[i][0], Locations[i][1],
Locations[j][0], Locations[j][1])
key = max(Pro.DistanceMatrix, key=Pro.DistanceMatrix.get)
Pro.LongestDistance = Pro.DistanceMatrix[key]
for k in range(Pro.veh_num):
for i in Locations.keys():
for j in Locations.keys():
if i != j:
Pro.TimeMatrix[i, j, k] = Pro.DistanceMatrix[i, j] / Pro.Vehicles[k][1]
def build_model(Pro):
# 建立pdptw问题的模型.
# 创建模型
model = Model() # gurobipy中的Model()
# 变量下标存放列表
node_num=Pro.node_num
ijk=[(i,j,k) for i in range(node_num) for j in range(node_num) if i!=j for k in range(Pro.veh_num)]
ik=[(i,k) for i in range(node_num) for k in range(Pro.veh_num)]
# 添加决策变量x_ijk,意为车辆k经过弧(i,j)
# 添加状态变量q_ik,意为车辆k离开节点i的存储量
# 添加状态变量b_ik,意为车辆k到达节点i的时间
x = model.addVars(ijk, vtype=GRB.BINARY, name='x') # 变量x_{ijk},GRB.BINARY表示{0,1}变量
q = model.addVars(ik, vtype=GRB.INTEGER, name='q') # 变量q_{ik},GRB.INTEGER为整数变量
b = model.addVars(ik, vtype=GRB.CONTINUOUS, name='b') # 变量b_{ik},GRB.CONTINUOUS为连续变量
model.update()#将变量跟新加入,不添加该行的话,查看model的变量为空
## ================== VRPTW===================
# 约束(1)every vertex has to be served exactly once,除了depot外,每个节点只被服务一次
for i in range(1, node_num - 1):
model.addConstr(x.sum(i, '*', '*') == 1,name="eq1-i%s"%i) # 星号*的用法
# 约束(2-3) guarantee that every vehicle starts at the depot and returns to the depot
# at the end of its route. 每辆车必须从depot出发,最后回到depot
# 约束(4) Flow conservation 流平衡约束
for k in Pro.Vehicles.keys():
model.addConstr(x.sum(0, '*', k) == 1,name="eq2-k%s"%k) # 车辆k从depot出发
model.addConstr(x.sum('*', node_num - 1, k) == 1,name="eq3-k%s"%k) # 车辆k回到depot
for i in range(1, node_num - 1): # 车辆k在P和D的流平衡约束
model.addConstr(x.sum(i, '*', k) == x.sum('*', i, k),name="eq4-k%s-i%s"%(k,i))
# 约束 (5) Time variables are used to eliminate subtours,用时间变量来消除子回路约束
# 需要用大M法来线性化该约束,M定义为 2*(LatestTime+LongestDistance)
vars=model.getVars()
for i,j,k in ijk:
if i !=j:
model.addConstr(b[j,k]+2*(1-x[i,j,k])*(Pro.LatestTime+Pro.LongestDistance) >=
b[i,k]+Pro.ServiceTime[i]+Pro.TimeMatrix[i,j,k],name="eq5-k%s-i%s-j%s"%(k,i,j))
# 约束(6-7) guarantee that a vehicle’s capacity is not exceeded throughout its tour,载货量平衡与车辆载量约束
# 约束(6) 载货量平衡约束,需要用大M法来线性化该约束,M定义为 100*车辆最大载量
for i,j,k in ijk:
if i!=j:
model.addConstr(q[j,k]+(1-x[i,j,k])*(100*Pro.Vehicles[k][0])>=q[i,k]+Pro.Demand[j],name="eq6-k%s-i%s-j%s"%(k,i,j))
# 约束(7)车辆载量约束
for i,k in ik:
model.addConstr(q[i,k] >=0, name="eq7.1-k%s-i%s"%(k,i))
model.addConstr(q[i,k] >=Pro.Demand[i],name="eq7.2-k%s-i%s"%(k,i))
model.addConstr(q[i,k] <= Pro.Vehicles[k][0],name="eq7.3-k%s-i%s"%(k,i))
model.addConstr(q[i,k] <=Pro.Vehicles[k][0]+Pro.Demand[i],name="eq7.4-k%s-i%s"%(k,i))
# 约束(8)depot和customer的时间窗约束
for k in Pro.Vehicles.keys():
# 两个depot的时间窗约束
model.addConstr(b[0, k] >= Pro.TimeWindow[0][0])
model.addConstr(b[0, k] <= Pro.TimeWindow[0][1])
model.addConstr(b[node_num - 1, k] >= Pro.TimeWindow[node_num - 1][0])
model.addConstr(b[node_num - 1, k] <= Pro.TimeWindow[node_num - 1][1])
#节点的时间窗口约束
for i in range(node_num):
model.addConstr(b[i,k] >= Pro.TimeWindow[i][0])
model.addConstr(b[i,k] <= Pro.TimeWindow[i][1])
# 旧代码的写法
# for k in Pro.Vehicles.keys():
# # 两个depot的时间窗约束
#
# model.addConstr(b[0, k] >= Pro.TimeWindow[0][0])
# model.addConstr(b[0, k] <= Pro.TimeWindow[0][1])
# model.addConstr(b[node_num - 1, k] >= Pro.TimeWindow[node_num - 1][0])
# model.addConstr(b[node_num - 1, k] <= Pro.TimeWindow[node_num - 1][1])
# Request=Pro.Request
# for r in range(Pro.pair_num):
# # 运输请求i两个节点的左时间窗
# model.addConstr(b[Request[r][0], k] >= Pro.TimeWindow[Request[r][0]][0])
# model.addConstr(b[Request[r][1], k] >= Pro.TimeWindow[Request[r][1]][0])
# # 运输请求i两个节点的右时间窗
# model.addConstr(b[Request[r][0], k] <= Pro.TimeWindow[Request[r][0]][1])
# model.addConstr(b[Request[r][1], k] <= Pro.TimeWindow[Request[r][1]][1])
## ================== PDPTW===================
# 约束(9)both origin and destination of a request must be served by the same vehicle
# 保证取货后要有对应的送货,取货和送货由同一辆车完成
for p in range(Pro.pair_num):
for k in Pro.Vehicles.keys():
model.addConstr(x.sum(Pro.Request[p][0], '*', k) == x.sum('*', Pro.Request[p][1], k),name="eq9-p%s"%p)
# 约束 (10) delivery can only occur after pickup,先取后送货约束
for p in range(Pro.pair_num):
for k in Pro.Vehicles.keys():
model.addConstr(b[Pro.Request[p][0], k] <= b[Pro.Request[p][1], k],name="eq10-p%s-k%s"%(p,k))
## 设置目标函数
# 目标函数(3):最小化车辆总的行驶距离
DistanceCost = 0
for k in Pro.Vehicles.keys():
for i in range(node_num):
for j in range(node_num):
if i != j:
DistanceCost += (Pro.DistanceMatrix[i, j] * x[i, j, k])
model.setObjective(DistanceCost, GRB.MINIMIZE)
model.update()
model.__data = x, b, q
return model
test.py
from gurobipy import *
import time
from utlis import Pro, read_txt_data, Construct_DisTime_Matrix, build_model
Pro=Pro()
start = time.time()
# DataPath="lc101.txt"
DataPath="smallcase.txt"
read_txt_data(DataPath,Pro)
Construct_DisTime_Matrix(Pro)
model=build_model(Pro)
model.params.TimeLimit = 1000 # 设定模型求解时间
model.write('PDPTW_%s.lp' % DataPath)
model.write('PDPTW_%s.mps' % DataPath)
model.setParam(GRB.Param.LogFile, 'PDPTW_%s.log' % DataPath)
model.optimize()
x,b,q = model.__data
end = time.time()
print('程序运行时间:')
print(end-start)
程序运行时间:
0.13767194747924805
查看结果
Optimize a model with 2588 rows, 1100 columns and 9060 nonzeros
Variable types: 100 continuous, 1000 integer (900 binary)
Coefficient statistics:
Matrix range [1e+00, 1e+04]
Objective range [1e+01, 4e+01]
Bounds range [1e+00, 1e+00]
RHS range [1e+00, 1e+04]
Presolve removed 740 rows and 50 columns
Presolve time: 0.03s
Presolved: 1848 rows, 1050 columns, 11628 nonzeros
Variable types: 100 continuous, 950 integer (850 binary)
Root relaxation: objective 8.000000e+01, 60 iterations, 0.00 seconds (0.00 work units)
Cutting planes:
Learned: 1
Gomory: 1
Implied bound: 39
MIR: 13
StrongCG: 3
RLT: 5
Relax-and-lift: 3
Explored 68 nodes (2136 simplex iterations) in 0.60 seconds (0.36 work units)
Thread count was 8 (of 8 available processors)
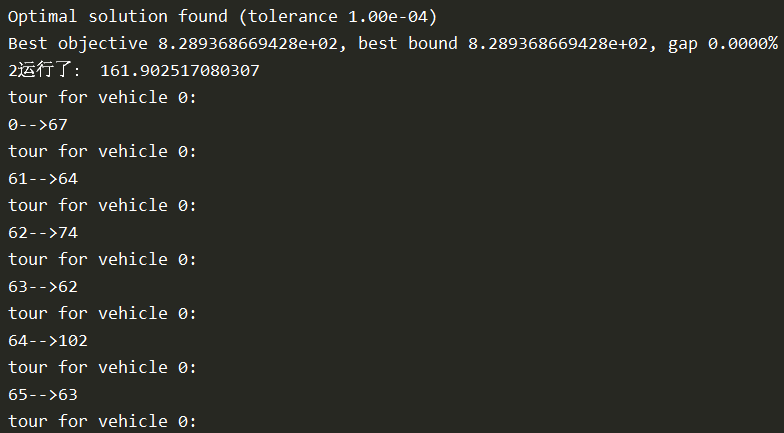
输出结果
# 输出方式2
for k in Pro.Vehicles.keys():
for i in range(Pro.node_num):
for j in range(Pro.node_num):
if i != j:
if (x[i,j,k].X- 0.5 > 0):
print('tour for vehicle %s:' % k)
print('%s-->%s' % (i,j))
out:
tour for vehicle 0:
0–>9
tour for vehicle 1:
0–>9
tour for vehicle 2:
0–>9
tour for vehicle 3:
0–>9
tour for vehicle 4:
0–>9
tour for vehicle 5:
0–>9
tour for vehicle 6:
0–>9
tour for vehicle 7:
0–>9
tour for vehicle 8:
0–>9
tour for vehicle 9:
0–>1
tour for vehicle 9:
1–>2
tour for vehicle 9:
2–>3
tour for vehicle 9:
3–>4
tour for vehicle 9:
4–>5
tour for vehicle 9:
5–>6
tour for vehicle 9:
6–>7
tour for vehicle 9:
7–>8
tour for vehicle 9:
8–>9
运行DataPath=“lc101.txt”
运行该程序,会出现模型不可解的现象。运行下面的代码。检查哪个约束条件出了问题。
if model.status == GRB.Status.INFEASIBLE:
print('Optimization was stopped with status %d' % model.status)
# do IIS, find infeasible constraints
model.computeIIS()
for c in model.getConstrs():
if c.IISConstr:
print('%s' % c.constrName)
out:
eq1-i97
eq3-k9
eq3-k13
eq9-p50-k9
eq9-p50-k13
检查:
公式1
∀
i
∈
P
∪
D
=
{
1
,
2
,
⋯
,
n
,
n
+
1
,
⋯
,
n
+
n
}
\forall i \in P\cup D=\{1,2,\cdots,n,n+1,\cdots,n+n\}
∀i∈P∪D={1,2,⋯,n,n+1,⋯,n+n}
∑
k
∈
K
∑
j
:
(
i
,
j
)
∈
A
x
i
j
k
=
1
(1)
\sum_{k\in K}\sum_{j:(i,j)\in A}x^k_{ij}=1 \tag{1}
k∈K∑j:(i,j)∈A∑xijk=1(1)
对于i=97的时候。
发现,与“smallcase.txt”最后位置少一行depot_end的一行数据.所以,导致在运行过程中,删除了97的对应节</f点。
公式3
∀
k
∈
K
\forall k \in K
∀k∈K
∑
j
:
(
0
,
j
)
∈
A
x
0
,
j
k
=
1
\sum_{j:(0,j)\in A}x_{0,j}^k=1
j:(0,j)∈A∑x0,jk=1
∑
i
:
(
i
,
n
+
n
~
+
1
)
∈
A
x
i
,
n
+
n
~
+
1
k
=
1
\sum_{i:(i,n+\tilde{n}+1)\in A} x^k_{i, n+\tilde{n}+1}=1
i:(i,n+n~+1)∈A∑xi,n+n~+1k=1
for k in Vehicles.keys():
model.addConstr(x.sum(0,'*',k) == 1) # 车辆k从depot出发
model.addConstr(x.sum('*',nrows-1,k) == 1) # 车辆k回到depot
表示:对于车辆k来说,仅有一次从depot出发,并仅有一次返回depot.这里的nrows-1值得使106行。而不是depot行。
约束(9)
弧(i,j)必须由同一辆车经过(先取货再送货).假设这些弧集为特定的集合
A
~
\tilde{A}
A~
∀
k
∈
K
\forall k \in K
∀k∈K,
∀
(
i
,
j
)
∈
A
~
\forall (i,j)\in \tilde{A}
∀(i,j)∈A~
∑
j
:
(
i
,
j
)
∈
A
~
x
i
j
k
=
∑
i
:
(
i
,
j
)
∈
A
~
x
i
j
k
\sum_{j:(i,j)\in \tilde{A}}x_{ij}^k=\sum_{i:(i,j)\in \tilde{A}}x_{ij}^k
j:(i,j)∈A~∑xijk=i:(i,j)∈A~∑xijk
for r in range(len(Request)):
for k in range(len(Vehicles)):
model.addConstr(x.sum(Request[r][0],'*',k)==x.sum('*',Request[r][1],k))
Request = {…, 48: [92, 93], 49: [96, 94], 50: [97, 106], 51: [98, 95], 52: [100, 99]}
检查Request中的key=50的值为:50 : [97, 106]
经查验,就是因为两个文件中depot的数量不同引起的。在”smallcase.txt"中将depot划分为depot_start和depot_end.而在“lc101.txt”中仅仅有一个depot.
要检查的地方有
- 数据读取的方式
#def read_txt_data(DataPath,Pro)
count = 0 # 记录运输需求的数量
for i in range(1, Pro.node_num ):
if TaskData.iloc[i, 6] == 0:
Pro.Request[count] = [i, TaskData.iloc[i, 7]] # 将取送货点组合在一起,键为count,值为[取货点,送货点]
count += 1
Pro.pair_num=count
- 公式3:关于depot的索引修改
# def build_model(Pro):
## 约束3中,返回depot的数字id为0,而不死node_num-1
for k in Pro.Vehicles.keys():
model.addConstr(x.sum(0, '*', k) == 1,name="eq2-k%s"%k) # 车辆k从depot出发
# model.addConstr(x.sum('*', node_num - 1, k) == 1,name="eq3-k%s"%k)
model.addConstr(x.sum('*', 0, k) == 1,name="eq3-k%s"%k)# 车辆k回到depot ###公式3
for i in range(1, node_num - 1): # 车辆k在P和D的流平衡约束
model.addConstr(x.sum(i, '*', k) == x.sum('*', i, k),name="eq4-k%s-i%s"%(k,i))
修正文件
但是最简单的方法,还是在“lc101.txt"最后一行加一个depot_end的信息。如下所示。
输出结果:







![236. 二叉树的最近公共祖先 - 力扣[LeetCode]](https://img-blog.csdnimg.cn/25bcf3890b7d4b5d974d5f927c4e5005.png)