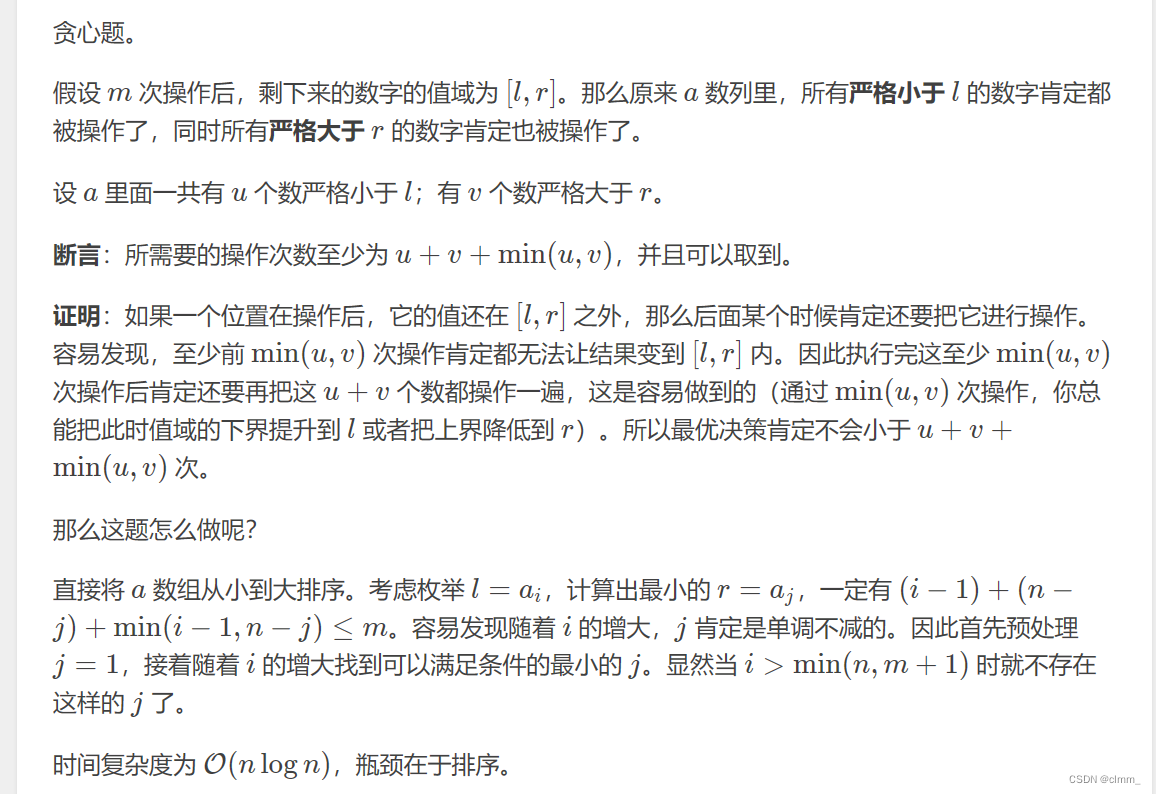
基于模型的控制方法:
把外部作用信号的动力学模型植入控制器来构成高精度反馈控制系统的设计原理。
内模原理(IMP)指的是,想要实现对R(s)的无差跟踪,系统的反馈回路中需要包含一个与外部输入R(s)相同的动力学模型。通常是在系统中植入一个外部输入及扰动信号的不稳定模型。

那么,控制器可以写成: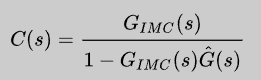
![]()
此时,系统的输出就等于系统的参考输入。

积分控制: 基于IMP的简单控制设计

积分控制之所以能够reject阶跃和常值扰动,保证阶跃追踪无静差,是因为控制器包含了外扰动的内模1/s
参考文献:
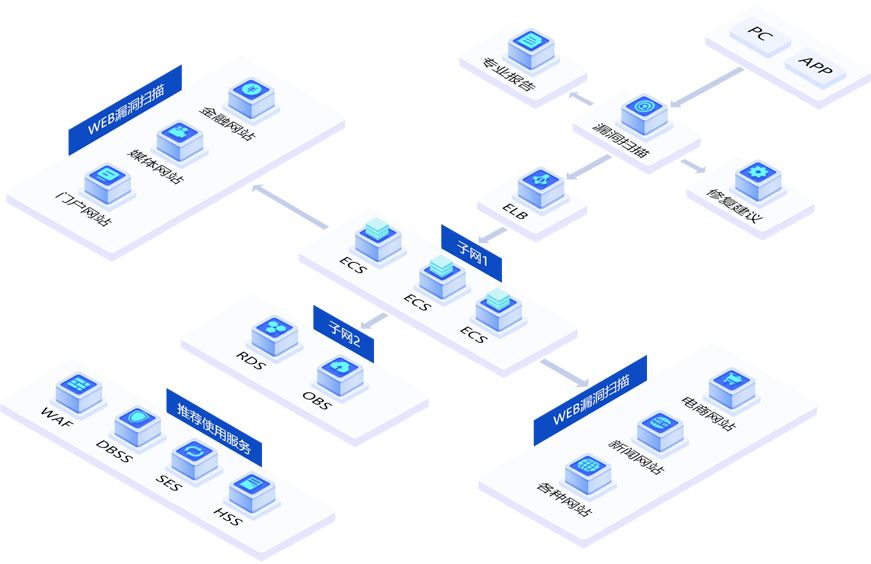
内模控制(Internal Model Control, IMC)的基本原理 - 哔哩哔哩内模控制(Internal Model Control, IMC)最早是由控制工程学者弗朗西斯(B. A. Francis)及翁汉(W. M. Wonham)所提出的,它是一种针对基于过程数学模型进行控制器设计的新型控制策略,由于它具有设计简单,控制性能好和在系统分析方面的优越性,因此它在工业过程控制中具有重要的研究意义。 目前应用最为广泛的是1982 年Garcia和Morari提出的具有模型、控制、反馈环节的内模控制结构,它的基本结构如下所示。其中虚线框里面的内容就是我们要设计的控制器,它可以通过硬件![]() https://www.bilibili.com/read/cv24581856/
https://www.bilibili.com/read/cv24581856/
17. 内模原理 Internal Model Principle - 知乎内模原理(Internal Model Principle,IMP)的阐述版本有很多,但是大致意思都差不多,即:当系统受到外部扰动作用时,调节控制器应当包含外扰的模型以实现零稳态误差。在上一篇文章中:三脚猫Frank:17. SISO反馈控…![]() https://zhuanlan.zhihu.com/p/131348966?utm_id=0
https://zhuanlan.zhihu.com/p/131348966?utm_id=0



![用最少数量的箭引爆气球[中等]](https://img-blog.csdnimg.cn/direct/7b1313d956dc4aa1a66c61bb7585b4f0.png)