文章目录
- 一、什么是noise?
- 二、什么是error?
- 三、常用error
一、什么是noise?
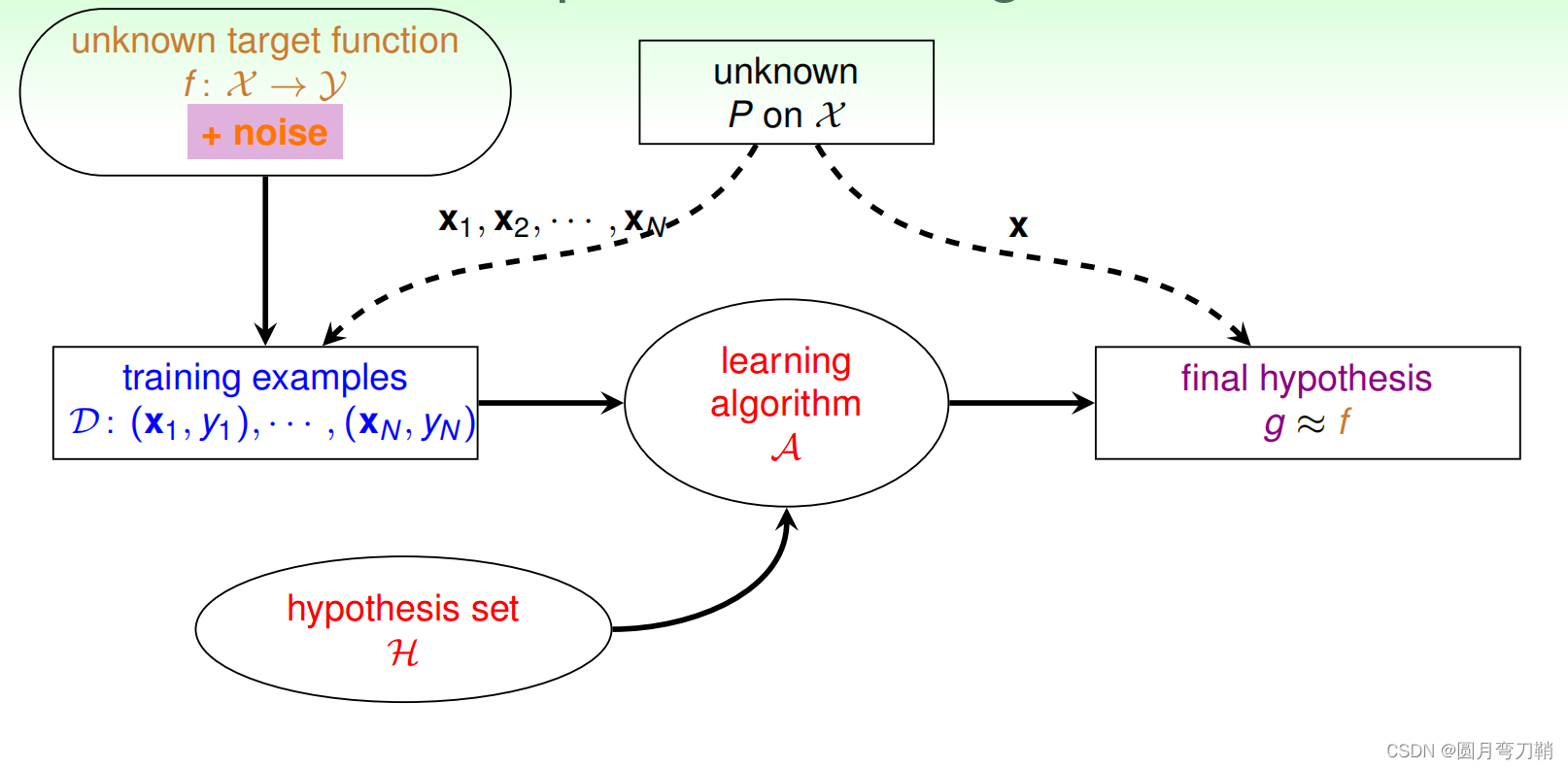
我们之前的讨论都是一种理想化的说明,比如数据来源于目标函数
f
f
f,似乎我们手里拿到的数据是这样得来的,随机取一个输入,放入f中,获得一个输出,这样一个(输入,输出)pair就组成了一个样本。
但是实际过程不可能是这样的,误差存在于方方面面,
- 首先对于输入,可能存在测量误差,比如我们手里拿到的一个数值10.5,有可能这个真实的数值是10。
- 其次对于输出,也存在和输入一样的情况(对于连续值),当然对于分类任务,输出可能是错误的类别, 这也是noise。
在有噪音的情况下,机器学习流程如下:
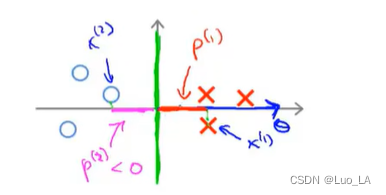
现在换一种说法,在理想情况下,给定某个输入
x
x
x,输出是确定的
y
=
f
(
x
)
y=f(x)
y=f(x),但是加上noise,输出就不是一个确定的值,而是一个分布
p
(
y
∣
x
)
p(y|x)
p(y∣x),机器学习流程图可以表述成如下形式:
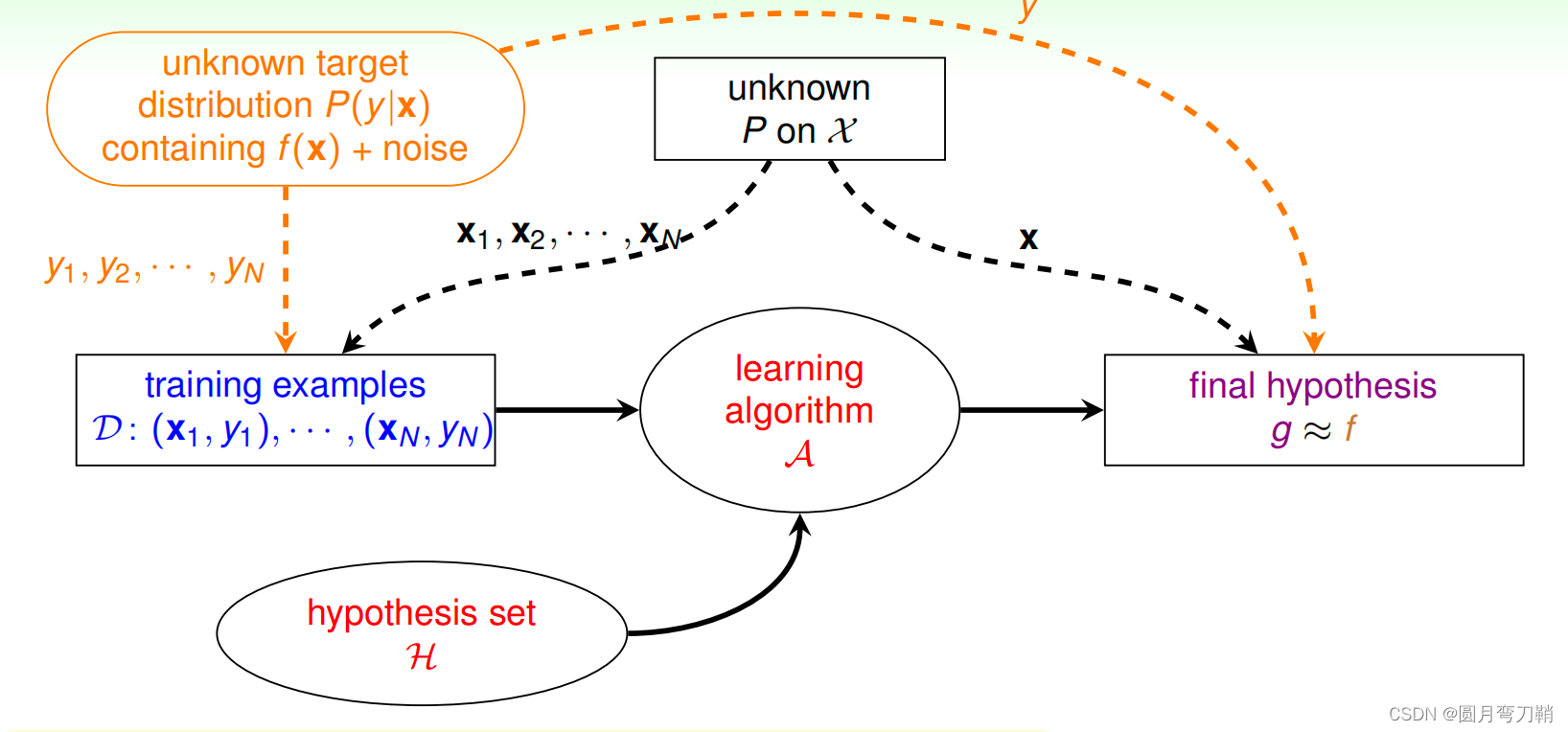
可喜可贺的是,PAC机器学习框架和上一篇内容介绍的vc理论在有noise的情况下也是成立的,也就是说,即使有噪声,机器学习仍然是可行的。
二、什么是error?
和noise不同,noise是无法避免的,但是error是我们自定义用来衡量机器学习结果和期望结果之间的差别的。针对不同的任务,不同的算法设计,error也不同:
- 对于分类问题,常见的error就是误分类点的个数;
- 当然,我们最常用的error还是用距离来度量的error,这种error在分类问题和回归问题上都可以用得到。常见的距离度量见此文章距离的度量。
error的设计不仅要考虑针对具体任务的合理性,也要考虑该error是否对于算法是易于优化的,通常我们希望error是可导的,所以距离度量型的error更常用。
三、常用error
- 0/1损失
e r r o r = c o u n t ( y ^ ≠ y ) error=count(\hat{y} \neq y) error=count(y^=y)
- 均方差损失MSE,
N
N
N个样本误差
e r r o r = 1 N ∑ i = 0 N − 1 ( y i ^ − y i ) 2 error=\frac{1}{N} \sum_{i=0}^{N-1}(\hat{y_i}-y_i)^2 error=N1i=0∑N−1(yi^−yi)2
3. 交叉熵损失cross entropy,针对
k
k
k分类问题,单个样本误差
e
r
r
o
r
=
−
∑
i
=
1
k
y
i
l
o
g
(
p
i
)
error=-\sum_{i=1}^{k}y_ilog(p_i)
error=−i=1∑kyilog(pi)
其中
p
i
p_i
pi表示模型将样本预测为类别
i
i
i的概率,如果样本真实类别为
i
i
i,则
y
i
=
1
y_i=1
yi=1,否则
y
i
=
0
y_i=0
yi=0。
所有样本的误差是取平均。








![DonkeyCar [02] - 软件配置 - 上位机(windows)](https://img-blog.csdnimg.cn/d4f2b13881f242dfb47d6b616075c574.png)