本教程基于韦东山百问网出的 DShanMCU-RA6M5开发板 进行编写,需要的同学可以在这里获取: https://item.taobao.com/item.htm?id=728461040949
配套资料获取:https://renesas-docs.100ask.net
瑞萨MCU零基础入门系列教程汇总: https://blog.csdn.net/qq_35181236/article/details/132779862
第8章 SCI SPI
本章目标
- 使用RASC快速配置SCI的SPI模式
- 学会使用SCI-SPI的API进行数据收发
8.1 sci spi模块的使用
8.1.1 配置sci spi模块
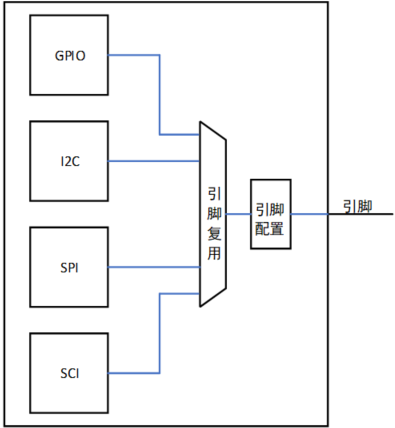
本章配置的SPI是RA芯片里SCI模块中的一种模式,因而其配置方法和上一章的SCI中的UART模式配置十分的类似。
本节实验没有和其它外设相连,因而可以选择任意SCI通道:把它设置为“Simple SPI”模式,并使用其默认引脚即可。在RASC中创建了工程后,在“Pins”里面的“Peripherals”中展开“Connectivity:SCI”,选择其中一个SCI通道,例如SCI5,在“Pin Configuration”配置界面里的“Operation Mode”中将操作模式选为“Simple SPI”,如图所示:

随后根据硬件设计来选择时钟和数据收发的引脚。
接着在“Stacks”中添加SCI SPI的堆栈模块,点击进入“Stacks”配置界面后,点击“New Stack”,展开里面的“Connectivity”,选择“SPI(r_sci_spi)”,如下图所示:
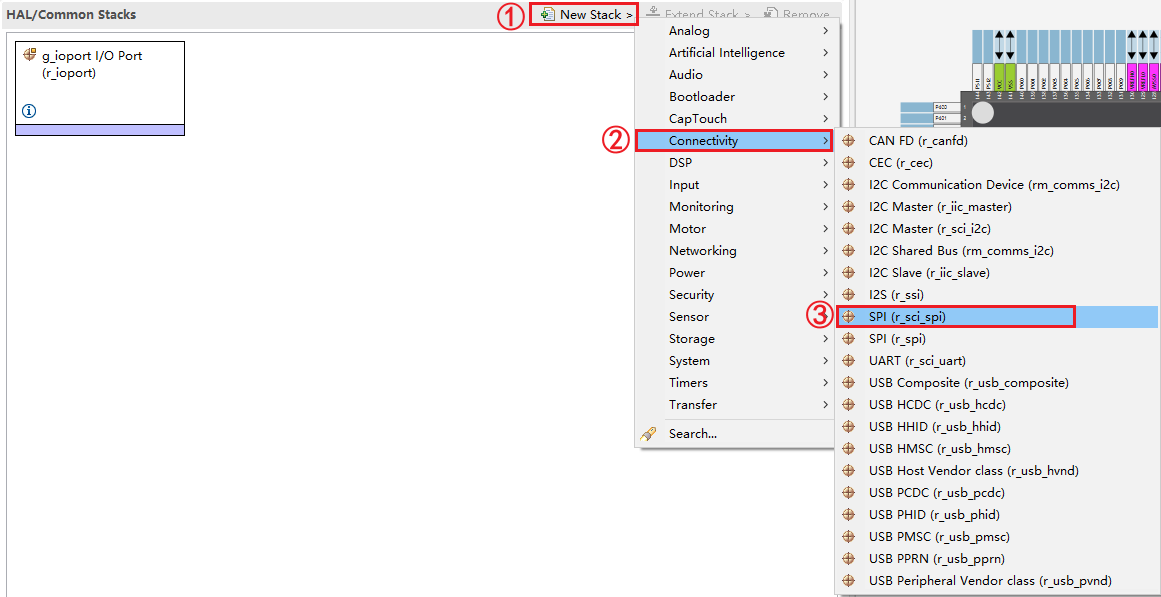
这里一定要注意,RA的SPI分为“Simple SPI”和“SPI”,“Simple SPI”是SCI的模式之一,而“SPI”是一个实际存在的SPI硬件控制器。本章的实验是基于SCI的SPI,因而选择的是“SPI(r_sci_spi)”。
完成这些操作后,会在“Stacks”配置界面的“HAL/Common Stacks”中新增一个“g_spi0 SPI(r_sci_spi)”模块,接下来就要根据实际情况配置这个模块的属性。比如在前面选择的是SCI的SPI5,而此处新增的模块默认名称是“g_spi0”且默认的通道是0,为了和实际通道匹配,就要去这个模块的属性中更改名称及其通道,如下图所示:

当这里选定好“Channel”后,下方的“Pins”里面的内容就会自动更新为前面操作的引脚。
对于属性中的“Callback”,它中断回调函数,函数的命名有两种方法:
- 不同的外设使用不同的回调函数;
- 同一类的外设使用相同的回调函数,根据参数内容做不同的处理;
对于初学者,建议使用第一种方法;而对于有经验的工程师,为了减小程序代码开销,建议使用第二种方法。本书使用第一种方法,将此SCI SPI的中断回调函数名称和它的通道相匹配,改为“sci_spi5_callback”,如图所示:

而对于SCI SPI的其它参数,需要根据实际通信的外设来设置,看一下在RASC中这些参数的信息:
-
Operating Mode:SPI的操作模式,SPI有两种模式分别是主机模式和从机模式,对应于此处的“Master”和“Slave”;
-
Clock Phase:时钟相位设置,决定SPI的数据是在时钟的上升沿还是下降沿采样,在上升沿还是下降沿保持,根据SPI通信的外设要求决定;
-
Clock Polarity:时钟优先状态,即在SPI通信空闲时,时钟保持高电平还是低电平;
-
Bit Order:数据传输方向,有两种选择分别是高位在前和低位在前,同样根据SPI通信的外设要求决定;
-
Bitrate:通信速率,这个速率要根据主机支持的SCI SPI最大通信速率和从机支持的SPI最大通信速率来共同决定,取两者的较小值;
将模块属性中的参数设置好之后点击“Generate Project Content”生成代码,可以在RASC的“Summary”界面的“Location”处快速打开工程所在目录来打开工程,如图所示:

8.1.2 配置信息解读
使用RASC配置SCI SPI后,生成了引脚配置信息和SCI SPI本身的配置信息。以本章的第一个实验“0801_sci_spi_loopback”回环收发实验为例。
- 引脚配置信息
该信息会在0801_sci_spi_loopback\ra_gen\pin_data.c文件里生成。在RASC里配置的每一个引脚,都会在pin_data.c生成一个ioport_pin_cfg_t数组项,里面的内容跟配置时选择的参数一致。代码如下:
const ioport_pin_cfg_t g_bsp_pin_cfg_data[] = {
{.pin = BSP_IO_PORT_01_PIN_08,
.pin_cfg = ((uint32_t) IOPORT_CFG_PERIPHERAL_PIN +
| (uint32_t) IOPORT_PERIPHERAL_DEBUG)
},
{.pin = BSP_IO_PORT_03_PIN_00,
.pin_cfg = ((uint32_t) IOPORT_CFG_PERIPHERAL_PIN
| (uint32_t) IOPORT_PERIPHERAL_DEBUG)
},
{.pin = BSP_IO_PORT_05_PIN_01,
.pin_cfg = ((uint32_t) IOPORT_CFG_PERIPHERAL_PIN
| (uint32_t) IOPORT_PERIPHERAL_SCI1_3_5_7_9)
},
{.pin = BSP_IO_PORT_05_PIN_02,
.pin_cfg = ((uint32_t) IOPORT_CFG_PERIPHERAL_PIN
| (uint32_t) IOPORT_PERIPHERAL_SCI1_3_5_7_9)
},
{.pin = BSP_IO_PORT_05_PIN_03,
.pin_cfg = ((uint32_t) IOPORT_CFG_PERIPHERAL_PIN
| (uint32_t) IOPORT_PERIPHERAL_SCI1_3_5_7_9)
},
};
- 第10~21行就是配置SCI的SPI5的引脚P501/P502/P503,将他们配置为SCI通道1、3、5、7、9的外设引脚。
- SCI SPI配置信息
该信息会在0801_sci_spi_loopback\ra_gen\hal_data.c文件里生成。在RASC里指定了SPI使用哪个SCI通道、指定了它的通道、时钟特性、数据传输方向和中断回调函数注册等信息,这些配置信息都被放入一个spi_cfg_t结构体,部分代码摘录如下:
const spi_cfg_t g_spi5_cfg =
{
.channel = 5,
.operating_mode = SPI_MODE_MASTER,
.clk_phase = SPI_CLK_PHASE_EDGE_ODD,
.clk_polarity = SPI_CLK_POLARITY_LOW,
.mode_fault = SPI_MODE_FAULT_ERROR_DISABLE,
.bit_order = SPI_BIT_ORDER_MSB_FIRST,
......(省略内容)
.p_callback = sci_spi5_callback,
......(省略内容)
};
- 第3行:指定使用的sci通道;
- 第4~8行:设置SPI的通信参数;
- 第10行:注册SPI的中断回调函数;
8.1.3 中断回调函数
中断回调函数的原型已经在hal_data.h中进行了声明,需要用户在自己的程序中实现,其原型代码如下:
/** Called by the driver when a transfer has completed or an error has occurred (Must be implemented by the user). */
#ifndef sci_spi5_callback
void sci_spi5_callback(spi_callback_args_t *p_args);
#endif
它的参数类型是一个spi_callback_args_t结构体指针,这个结构体的原型如下:
/** Common callback parameter definition */
typedef struct st_spi_callback_args
{
uint32_t channel; ///< Device channel number
spi_event_t event; ///< Event code
void const * p_context; ///< Context provided to user during callback
} spi_callback_args_t;
此结构体会表明触发此中断的是哪一个sci通道,是什么事件触发的,而触发的内容在sci中是没有使用到的。
触发中断的事件由枚举类型spi_event_t指明,这个枚举的内容如下:
/** SPI events */
typedef enum e_spi_event
{
SPI_EVENT_TRANSFER_COMPLETE = 1, ///< The data transfer was completed
SPI_EVENT_TRANSFER_ABORTED, ///< The data transfer was aborted
SPI_EVENT_ERR_MODE_FAULT, ///< Mode fault error
SPI_EVENT_ERR_READ_OVERFLOW, ///< Read overflow error
SPI_EVENT_ERR_PARITY, ///< Parity error
SPI_EVENT_ERR_OVERRUN, ///< Overrun error
SPI_EVENT_ERR_FRAMING, ///< Framing error
SPI_EVENT_ERR_MODE_UNDERRUN ///< Underrun error
} spi_event_t;
包括了SPI发送完成中断事件、发送暂停事件和其它错误事件。用户就可以根据传参进来的事件进行对应的处理。例如在spi5的中断回调函数中,可以如下设置“发送完成标志”:
void sci_spi5_callback(spi_callback_args_t *arg)
{
if(SPI_EVENT_TRANSFER_COMPLETE == arg->event)
sci_spi5_tx_cplt = 1;
}
-
第3行:判断事件是否为SPI发送完成事件;
-
第4行:如果是发送完成触发的中断,则将发送完成标志位置1;
8.1.4 API接口及其用法
在0801_sci_spi_loopback\ra\fsp\inc\api\r_spi_api.h中定义了spi模块的接口,它定义了一个结构体类型spi_api_t,内容如下:
/** Shared Interface definition for SPI */
typedef struct st_spi_api
{
fsp_err_t (* open)(spi_ctrl_t * p_ctrl, spi_cfg_t const * const p_cfg);
fsp_err_t (* read)(spi_ctrl_t * const p_ctrl,
void * p_dest,
uint32_t const length,
spi_bit_width_t const bit_width);
fsp_err_t (* write)(spi_ctrl_t * const p_ctrl,
void const * p_src,
uint32_t const length,
spi_bit_width_t const bit_width);
fsp_err_t (* writeRead)(spi_ctrl_t * const p_ctrl,
void const * p_src,
void * p_dest,
uint32_t const length,
spi_bit_width_t const bit_width);
fsp_err_t (* callbackSet)(spi_ctrl_t * const p_api_ctrl,
void (* p_callback)(spi_callback_args_t *),
void const * const p_context,
spi_callback_args_t * const p_callback_memory);
fsp_err_t (* close)(spi_ctrl_t * const p_ctrl);
} spi_api_t;
在具体的C文件中,需要实现一个sci_api_t结构体变量,比如在r_sci_spi.c里实现了如下结构体:
const spi_api_t g_spi_on_sci =
{
.open = R_SCI_SPI_Open,
.read = R_SCI_SPI_Read,
.write = R_SCI_SPI_Write,
.writeRead = R_SCI_SPI_WriteRead,
.close = R_SCI_SPI_Close,
.callbackSet = R_SCI_SPI_CallbackSet
};
要使用SCI SPI收发数据时,可以调用结构体g_spi_on_sci里的各个函数指针,也可以直接调用r_sci_spi.c里实现的各个函数(比如
R_SCI_SPI_Open、R_SCI_SPI_Read)。
- 打开SCI SPI设备
此函数用于配置SCI的SPI,并且标记转态为“已经打开”。函数原型:
fsp_err_t (* open)(spi_ctrl_t * p_ctrl, spi_cfg_t const * const p_cfg);
来看一下这个函数的参数:
a) p_ctrl:此参数是一个spi_ctrl_t结构体指针类型,该结构体本质上void类型,原型如下:
typedef void spi_ctrl_t;
它可以指向任意类型的参数,在r_sci_spi.h里,这个参数实际的类型是sci_spi_instance_ctrl_t结构体,定义如下:
typedef struct st_sci_spi_instance_ctrl
{
uint32_t open;
spi_cfg_t const * p_cfg;
R_SCI0_Type * p_reg;
uint8_t * p_src;
uint8_t * p_dest;
uint32_t tx_count;
uint32_t rx_count;
uint32_t count;
/* Pointer to callback and optional working memory */
void (* p_callback)(spi_callback_args_t *);
spi_callback_args_t * p_callback_memory;
/* Pointer to context to be passed into callback function */
void const * p_context;
} sci_spi_instance_ctrl_t;
- 第3行:open表示SPI设备的状态,是关闭还是打开状态
- 第4行:SPI的配置信息,指定在SPI传输过程中类如发送中断、接受中断等的中断号、中断优先级和时钟特性等;
- 第5行:R_SCI0_Type结构体对应SCI的各个寄存器;
- 第6、7行:指向发送数据的首地址和接收数据保存到内存中的首地址;
- 都8、9行:当发送完一个字节或接收到一个字节的数据后,发送计数将会在中断中减1,而接收计数将会加1,直到发送计数为0或接收计数达到指定接收长度值,就会调用中断回调函数;
- 第13行:指向中断回调函数;
- 第14行:保存中断回调函数信息;
- 第17行:传递给中断回调函数的其他信息;
b) p_cfg:此参数是spi_cfg_t结构体类型,该结构体就是上述第4行的内容,原型如下:
typedef struct st_spi_cfg
{
uint8_t channel; ///< Channel number to be used
IRQn_Type rxi_irq; ///< Receive Buffer Full IRQ number
IRQn_Type txi_irq; ///< Transmit Buffer Empty IRQ number
IRQn_Type tei_irq; ///< Transfer Complete IRQ number
IRQn_Type eri_irq; ///< Error IRQ number
uint8_t rxi_ipl; ///< Receive Interrupt priority
uint8_t txi_ipl; ///< Transmit Interrupt priority
uint8_t tei_ipl; ///< Transfer Complete Interrupt priority
uint8_t eri_ipl; ///< Error Interrupt priority
spi_mode_t operating_mode; ///< Select master or slave operating mode
spi_clk_phase_t clk_phase; ///< Data sampling on odd or even clock edge
spi_clk_polarity_t clk_polarity; ///< Clock level when idle
spi_mode_fault_t mode_fault;///< Mode fault error (master/slave conflict) flag
spi_bit_order_t bit_order; ///< Select to transmit MSB/LSB first
transfer_instance_t const * p_transfer_tx; ///< To use SPI DTC/DMA write transfer, link a DTC/DMA instance here. Set to NULL if unused.
transfer_instance_t const * p_transfer_rx; ///< To use SPI DTC/DMA read transfer, link a DTC/DMA instance here. Set to NULL if unused.
void (* p_callback)(spi_callback_args_t * p_args); ///< Pointer to user callback function
void const * p_context; ///< User defined context passed to callback function
void const * p_extend; ///< Extended SPI hardware dependent configuration
} spi_cfg_t;
这些参数在使用RASC配置后,自动生成对应的配置信息代码。
开发者可以在自己的代码中调用open函数来实现对sci spi设备的初始化,例如:
void drv_sci_spi_init(void)
{
fsp_err_t err = g_spi5.p_api->open(g_spi5.p_ctrl, g_spi5.p_cfg);
if(FSP_SUCCESS == err)
printf("Success to open device: spi5\r\n");
else
printf("Failed to open device: spi5\r\n");
}
- 关闭SCI SPI设备
SCI SPI设备的close函数,会将SPI设备的状态标志open设置为0,原型如下:
fsp_err_t (* close)(spi_ctrl_t * const p_ctrl);
此函数的参数就是一个spi_crl_t结构体类型的参数。开发者可以参考以下代码来关闭指定的spi设备:
void drv_sci_spi_close(void)
{
fsp_err_t err = g_spi5.p_api->close(g_spi5.p_ctrl);
if(FSP_SUCCESS == err)
printf("Success to close device: spi5\r\n");
else
printf("Failed to close device: spi5\r\n");
}
- 使用SCI SPI发送指定长度的数据
SCI SPI的发送函数write适用于半双工或单工通信场景,其原型如下:
fsp_err_t (* write)(spi_ctrl_t * const p_ctrl,
void const * p_src,
uint32_t const length,
spi_bit_width_t const bit_width);
来看一下它的参数:
- p_ctrl:spi_crl_t结构体类型参数,传入使用RASC生成的spi设备的全局结构体变量;
- p_src:源数据(要发送的数据)地址;
- length:要发送的数据个数;
- bit_width:数据宽度,在SCI中一律设置为8Bit即,此位传入SPI_BIT_WIDTH_8_BITS;
开发者可以参考如下代码来发送指定长度的数据:
void drv_sci_spi_write(uint8_t *pbuf, uint16_t size)
{
sci_spi5_tx_cplt = 0;
g_spi5.p_api->write(g_spi5.p_ctrl,
(uint8_t*)pbuf,
(uint32_t)size, SPI_BIT_WIDTH_8_BITS);
while(!sci_spi5_tx_cplt);
}
第3行和第5行是发送标志:发送前清零,如果发送完成会在中断回调函数中被置1。
- 使用SCI SPI接收指定长度的数据
SCI SPI的接收函数read适用于半双工或单工通信场景,其原型如下:
fsp_err_t (* read)(spi_ctrl_t * const p_ctrl,
void * p_dest,
uint32_t const length,
spi_bit_width_t const bit_width);
和发送及其相似,只不过p_dest是接收数据的缓冲区首地址,其数据宽度依然是8Bit。
开发者可以参考如下代码来接收指定长度的数据:
g_spi5.p_api->read(g_spi5.p_ctrl, (uint8_t*)pbuf, (uint32_t)size, SPI_BIT_WIDTH_8_BITS);
- 使用SCI SPI同时收发指定长度的数据
在全双工模式下建议使用SCI SPI的同时收发函数writeRead,其原型如下:
fsp_err_t (* writeRead)(spi_ctrl_t * const p_ctrl,
void const * p_src,
void * p_dest,
uint32_t const length,
spi_bit_width_t const bit_width);
使用此函数可以同时发送和接收相同长度的数据,数据宽度是8bit。开发者可以参考以下代码来实现同时收发:
void drv_sci_spi_writeRead(uint8_t *wbuf, uint8_t *rbuf, uint16_t size)
{
sci_spi5_tx_cplt = 0;
g_spi5.p_api->writeRead(g_spi5.p_ctrl,
(uint8_t*)wbuf,
(uint8_t*)rbuf,
(uint32_t)size,
SPI_BIT_WIDTH_8_BITS);
while(!sci_spi5_tx_cplt);
}
8.2 sci spi回环收发实验
本节实验会用到UART的printf功能,请参考前文《7.3 stdio实验》配置实现printf功能。
8.2.1 硬件连接
所谓回环收发就是自发自收,数据从MCU的MOSI直接发送给自身的MISO,因而在硬件上只需要将MOSI和MISO短接即可。例如本节实验0801_sci_spi_loopback使用到的SCI5,其发送引脚是P501,接收引脚是P502,做本实验将这两个脚短接即可,不用管SCK和CS引脚。

8.2.2 应用程序
本实验工程将spi的驱动代码模块化,分为初始化函数、收发函数、中断回调函数和测试函数,spi的驱动函数都在drv_sci_spi.c中实现,在drv_sci_spi.h中声明,测试函数在app_spi.c中实现,在app.h中声明,以便后续移植使用。

- 设备初始化
函数:void SPIDrvInit(void),实现如下:
void SPIDrvInit(void)
{
/* 打开设备 */
fsp_err_t err = g_spi5.p_api->open(g_spi5.p_ctrl, g_spi5.p_cfg);
/* 发送调试信息 */
if(FSP_SUCCESS == err)
printf("Success to open device: spi5\r\n");
else
printf("Failed to open device: spi5\r\n");
}
- 中断回调函数
中断回调函数已经在前文讲过许多次,这里直接展示其实现:
static volatile bool gSPITxCplt = false;
void sci_spi5_callback(spi_callback_args_t *arg)
{
/* 判断是否是发送完成触发的中断 */
/* 如果是的话就将发送完成标志位置1 */
if(SPI_EVENT_TRANSFER_COMPLETE == arg->event)
gSPITxCplt = true;
}
发送完成标志是一个静态的全局变量:
static volatile bool gSPITxCplt = false;
它会在中断回调函数中被修改,使用了关键字volatile修饰。
- 收发完成等待函数
每次收发通信的时候,需要根据收发状态标志来判断是否通信完成,因而将这一个判断动作封装成一个超时等待函数:void SPIDrvWaitTxCplt(void),代码如下:
static void SPIDrvWaitTxCplt(void)
{
uint16_t wTimeout = 50;
while(!gSPITxCplt && wTimeout)
{
R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_MILLISECONDS);
wTimeout--;
}
gSPITxCplt = false;
}
- 收发数据驱动函数
对于此函数的调用者而言,实际上只需要关心存有发送数据的缓冲区、用于接收数据的缓冲区、要收发的数据个数,并不关心数据传输的宽度,因而将收发函数封装为以下这样的函数:
void SPIDrvWriteReadBuf(uint8_t *wbuf, uint8_t *rbuf, uint16_t wSize)
{
/* 调用writeRead函数收发数据 */
g_spi5.p_api->writeRead(g_spi5.p_ctrl,
(uint8_t*)wbuf,
(uint8_t*)rbuf,
(uint32_t)wSize,
SPI_BIT_WIDTH_8_BITS);
/* 等待size长度的数据发送和接收完成 */
SPIDrvWaitTxCplt();
}
- 测试代码
测试代码比较简单,就是每次收发相同长度的数据然后进行注意比较,出错则将错误数据打印出来,代码实现如下:
void SPIAppTest(void)
{
SPIDrvInit();
/* 测试计数,测试count次后退出测试 */
uint32_t dwCount = 5;
/* 收发数据保存的数组,长度为256字节 */
uint8_t wBuf[256] = {0};
uint8_t rBuf[256] = {0};
while(dwCount)
{
/* 每次发送数据前给发送数组赋值随机数,增加测试可靠性 */
for(uint16_t i=0; i<256; i++)
{
wBuf[i] = (uint8_t)rand();
}
/* 同时收发256字节数据 */
SPIDrvWriteReadBuf(wBuf, rBuf, 256);
uint16_t err = 0;
/* 逐一比较收发数组中的数据是否一致,如果出现不一致就将其打印出来观察并且计数错误个数 */
for(uint16_t i=0; i<256; i++)
{
if(wBuf[i] != rBuf[i])
{
err++;
printf("Error:\r\n\twBuf:0x%.2x\trBuf:0x%.2x\r\n", wBuf[i], rBuf[i]);
}
}
if(0 == err)
printf("Success to write and read data by sci spi:\t%d!\r\n", (int)dwCount);
dwCount--
/* 每隔1秒测试一次 */
R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_SECONDS);
}
}
8.2.3 上机实验
在hal_entry.c中调用void drv_sci_spi_init(void)初始化函数,将编译成功后生成的可执行二进制文件烧写到芯片中,可以观察到如下现象:

8.3 sci spi驱动显示屏实验
本节实验会用到UART的printf功能,请参考前文《7.3 stdio实验》配置实现printf功能,并将0801_sci_spi_loopback/drivers中的drv_uart.c和drv_uart.h移植到本节实验的工程中。
8.3.1 硬件连接
本节实验是使用RA的SCI SPI模式驱动一块SPI接口的显示屏,这块显示屏的驱动芯片是ST7796s,实验板和显示屏的连接原理图如图所示:

本节实验只涉及SPI通信,因而只需要关心原理图中13~19号引脚,各引脚的意思如下表:
| 显示屏接口号 | 接口含义 | MCU引脚号 | MCU引脚模式 |
|---|---|---|---|
| 13-MISO | SPI从机的输出引脚,主机的输入引脚 | P100 | SCI0 SPI的RXD0 |
| 14-CS | SPI片选脚,低电平有效 | P103 | GPIO Out |
| 15-RS | ST7796s的数据/命令切换引脚,高电平表示接收数据,低电平表示接收命令 | P104 | GPIO Out |
| 16-SCK | SPI的时钟输出引脚 | P102 | SCI0 SPI的SCK0 |
| 17-MOSI | SPI主机的输出引脚,从机的输入引脚 | P101 | SCI0 SPI的TXD0 |
| 18-RESET | ST7796s的硬件复位引脚 | P105 | GPIO Out |
| 19-PWM | 显示屏的背光控制引脚,高电平点亮 | P608 | GPIO Out/GPT5的GTIOC5A |
对于背光控制引脚,既可以直接使用IO输出高电平全功率点亮屏幕,也可以使用GPT功能输出PWM调节,由于还没有讲到GPT外设,本节将P608配置为GPIO的输出模式。
8.3.2 配置SCI SPI和Ports
配置SCI的SPI和GPIO在前面的章节已经讲过,本节就不再赘述。与本章第一个实验不同的是,本节使用的引脚是SCI0的SPI引脚,因而在选择SCI通道的时候要选择为SCI0,且配置其Stack的时候要将控制块名称和通道都和通道0相匹配,中断回调函数那里也取名为sci_spi0_callback。
8.3.3 显示屏驱动解析
要驱动一块显示屏,必须要先了解这块显示屏内部的驱动芯片,弄清楚这块芯片支持什么接口,用什么协议通信,支持那种颜色格式,有哪些配置命令等等。这些都需要去仔细阅读显示屏驱动芯片的手册。
一块显示屏的驱动是比较复杂的,要想将其显示性能尽可能的发挥是需要花很长时间去钻研手册的,这不是本书的重点,本书将演示如何点亮ST7796s驱动的屏幕,并把屏幕设置为指定颜色。
- 屏幕分辨率
ST7796s能够驱动分辨率最大为320480的屏幕,每个像素使用16tbit表示其颜色。全屏显示需要显存320480*2字节,约300K字节。
- 支持的接口协议
ST7796s支持的接口协议有许多种,例如:
- 8bit/9bit/16bit/18bit的8080并行接口;
- 16/18 RGB接口;
- 3线制/4线制串行接口;
- MIPI接口;
本书使用的是4线制串行接口,也就是SPI接口,包括CS、SCK、MOSI和MISO。
- 命令/数据切换控制
在串行接口驱动下,通信数据从数据模式到命令模式的相互切换依靠的是ST7796s的DCX引脚,也就是前文原理图中的RS引脚,手册中对此引脚的描述如下图:

此引脚输入的电平为‘1’时,ST7796s认为收到的数据为显示数据;为‘0’时认为收到的数据是命令。也就是书SPI主机,即单片机这边通过RS引脚输出高低电平来切换数据的模式。
- 休眠与唤醒
当ST7796s发生硬件复位或软件复位时,复位结束后芯片是处于休眠模式的,即手册中说的Sleep in模式,在此模式下芯片的内部晶振不会工作,DC转换也会停止,因而显示也会失效。
要想正常的显示就需要将其唤醒,休眠和唤醒都是通过命令来控制的:
- 0x10:Sleep in
- 0x11:Sleep out
这两个命令在休眠模式下都是可以通过SPI传输给ST7796s,因而在低功耗场景下,可以用这两个命令实现屏幕的休眠和唤醒。
- 显示模式设置
ST7796s支持的显示模式有局部显示和普通显示。局部显示,顾名思义,就是在320 RGB*480分辨率下不显示完整,仅在某个区域显示。在局部显示模式下,需要通过命令来设置显示区域。普通显示就是整屏显示。
这两个模式的设置命令如下:
- 0x12:局部显示;
- 0x13:普通显示;
- 显示方向设置
图像在屏幕上的显示方向由两个要素控制:像素显示方向和颜色显示方向。像素显示方向由4个方位组合,即上下左右,可以分为:
- 左->右,上->下;
- 左->右,下->上;
- 右->左,上->下;
- 右->左,下->上;
而颜色方向则只有两种:RGB或BGR。
一般人们习惯的阅读方式是左->右,上->下,而颜色方向常用的是RGB。控制显示方向的命令是0x36,其描述如下:

MY/X/V是像素数据在现存中行列地址读写的方向,细节如下图:

具体的示例在手册中有详细描写,本节仅摘取部分,如图所示:
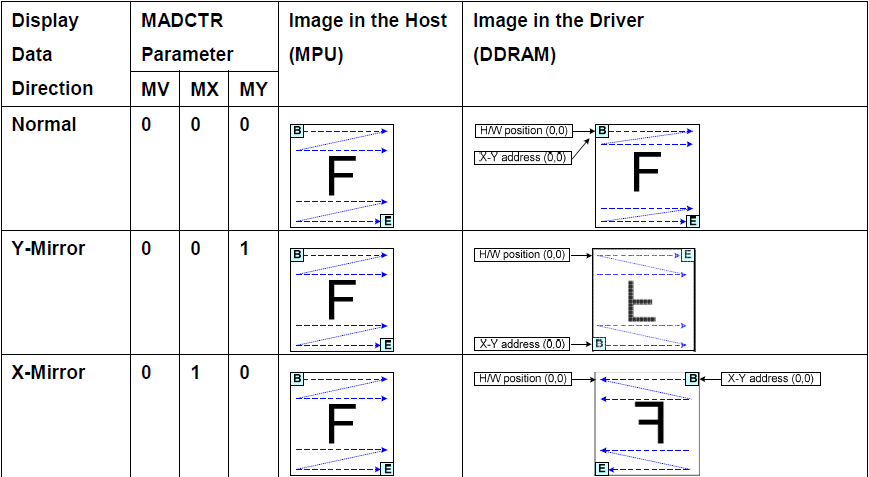
要让数据对应的像素点如何显示取决于具体的应用场景。
- 颜色格式设置
设置颜色格式使用的命令是0x3A,其描述如下图所示:

通常情况下将RGB接口的颜色格式和控制接口的颜色格式都设置为16bit,即写为0x55。
- 显示的开启和关闭
开启和关闭显示使用到的命令分别是0x29和0x28:
- 0x28:Display Off,关闭显示;
- 0x29:Display On,开启显示;
- 显示地址设置
显示地址分为行地址和列地址,设置行列地址有不同的命令,分别是:
- 0x2A:Column Address Set,列地址设置;
- 0x2B:Row Address Set,行地址设置;
观察下手册中对这两个命令的描述:

可以看到,他们均需要设置各自的起始地址和结束地址,且均是先发送始地址的高8位,再发送始地址的低8位,接着发送结束地址的高8位,最后发送结束地址的低8位。
清楚了这个规则后,在之后的设置显示区域的时候就知道该怎么写代码了。
- 将数据写入显存
将数据写入显存使用的命令是0x2C,看下它的描述:

不难理解,当发送了0x2C给芯片后,接着可以发N个字节的像素数据到显存。
8.3.4 显示屏驱动程序
通过前文已经可以理清楚驱动ST7796s的基本流程:

本次实验将显示器的驱动代码在drv_sci_spi_disp.c中实现,显示器设备结构体在drv_config.h中声明。
- 中断回调函数和写等待函数
中断回调函数将发送完成标志写1,而写等待函数则是等待发送完成标志被设置为1之后再将其清零,代码如下:
static volatile bool gFlagWaitTX = false;
void sci_spi0_callback(spi_callback_args_t *arg)
{
/* 判断是否是发送完成触发的中断 */
/* 如果是的话就将发送完成标志位置1 */
if(SPI_EVENT_TRANSFER_COMPLETE == arg->event)
gFlagWaitTX = true;
}
static void LCDDrvWaitTX(void)
{
volatile uint16_t wTimeout = 500;
while(!gFlagWaitTX && wTimeout)
{
R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_MILLISECONDS);
wTimeout--;
}
gFlagWaitTX = false;
}
- 定义引脚状态
根据ST7796s的引脚描述和原理图连接关系,来定义各引脚的状态枚举类型,代码如下:
typedef enum{
notLight,
isLight
}Black; /* 背光引脚控制状态 */
typedef enum{
isReset,
notReset
}Reset; /* 复位引脚控制状态 */
typedef enum{
isSelect,
notSelect
}CS; /* 片选信号控制状态 */
typedef enum{
isCommand,
isData
}DC; /* 数据/命令切换控制状态 */
- 控制引脚操作函数
驱动ST7796s需要控制4个引脚,用来选中设备、切换指令数据、硬件复位、控制背光等,他们的代码如下:
static void LCDDrvWriteCS(CS eState)
{
g_ioport.p_api->pinWrite(g_ioport.p_ctrl,
BSP_IO_PORT_01_PIN_03,
(bsp_io_level_t)eState);
}
static void LCDDrvWriteDCX(DCX eState)
{
g_ioport.p_api->pinWrite(g_ioport.p_ctrl,
BSP_IO_PORT_01_PIN_04,
(bsp_io_level_t)eState);
}
static void LCDDrvWriteReset(Reset eState)
{
g_ioport.p_api->pinWrite(g_ioport.p_ctrl,
BSP_IO_PORT_01_PIN_05,
(bsp_io_level_t)eState);
}
static void LCDDrvWriteBlack(Black eState)
{
g_ioport.p_api->pinWrite(g_ioport.p_ctrl,
BSP_IO_PORT_06_PIN_08,
(bsp_io_level_t)eState);
}
因为这些控制函数仅会在ST7796s的内部驱动函数中用到,因而都是静态函数,在后续的使用中可以这样使用:
LCDDrvWriteReset(isReset);
LCDDrvWriteDCX(isCommand);
LCDDrvWriteDCX(isData);
LCDDrvWriteCS(isSelect);
- 硬件复位
通过RESET引脚硬件复位驱动芯片,低电平复位,复位结束后要将其拉回高电平,以免使芯片一直处于复位状态,代码如下:
static void LCDDrvHWReset(void)
{
LCDDrvWriteReset(isReset);
R_BSP_SoftwareDelay(100, BSP_DELAY_UNITS_MILLISECONDS);
LCDDrvWriteReset(notReset);
R_BSP_SoftwareDelay(50, BSP_DELAY_UNITS_MILLISECONDS);
}
- 写寄存器命令函数
写命令需要将引脚DCX拉低,然后发送一个字节的命令数据,代码如下:
static void LCDDrvWriteReg(uint8_t reg)
{
LCDDrvWriteDCX(isCommand);
g_spi0.p_api->write(&g_spi0_ctrl, (uint8_t*)®, 1, SPI_BIT_WIDTH_8_BITS);
LCDDrvWaitTX();
}
- 写数据函数
写数据则需要将DCX拉高,然后开始发送数据,此处封装的是给寄存器发送数据的函数,每次只发送一个字节,代码如下:
static void LCDDrvWriteDat(uint8_t dat)
{
LCDDrvWriteDCX(isData);
g_spi0.p_api->write(&g_spi0_ctrl, (uint8_t*)&dat, 1, SPI_BIT_WIDTH_8_BITS);
LCDDrvWaitTX();
}
- 写多字节数据函数
在显示器驱动中,通常是把很多数据连续地发送给显示器,本工程将其封装成了如下函数:
static void LCDDrvWriteBuf(uint8_t* buf, uint32_t size)
{
LCDDrvWriteReg(0x3C);
LCDDrvWriteDCX(isData);
unsigned char *pbuf = (unsigned int*)buf;
while(size)
{
uint32_t length = 0;
if(size<65536)
length = (uint16_t)size;
else
{
length = 65535;
}
fsp_err_t err = g_spi0.p_api->write(g_spi0.p_ctrl, pbuf, length, SPI_BIT_WIDTH_8_BITS);
assert(FSP_SUCCESS==err);
LCDDrvWaitTX();
size = size - length;
pbuf = pbuf + length;
}
}
static void LCDDrvWriteBuf(uint8_t* buf, uint32_t size)
{
LCDDrvWriteReg(0x3C);
LCDDrvWriteDCX(isData);
g_spi0.p_api->write(&g_spi0_ctrl, (uint8_t*)buf, size, SPI_BIT_WIDTH_8_BITS);
LCDDrvWaitTX();
}
先发送一个0x3C指令,告诉显示器即将来很多个数据,然后再开始发送数据。
0x3C连续写模式仅在ST7796s的’MX=1’下才可使用。
- 注册显示器控制函数
同样使用面向对象编程思想,将显示器的操作封装到一个结构体中,用函数指针成员来指向具体的操作函数,此结构体在drv_disp.h中定义如下:
typedef struct DisplayDevice {
char *name;
void *FBBase; /* CPU能直接读写的显存 */
unsigned short wXres; /* X方向分辨率 */
unsigned short wYres; /* Y方向分辨率 */
unsigned short wBpp; /* 每个像素使用多少个像素 */
unsigned int dwSize;
void (*Init)(struct DisplayDevice *ptDev); /* 硬件初始化 */
void (*DisplayON)(struct DisplayDevice *ptDev); /* 开启显示 */
void (*DisplayOFF)(struct DisplayDevice *ptDev); /* 关闭显示 */
void (*SetDisplayWindow)(struct DisplayDevice* ptDev, \
unsigned short wXs, unsigned short wYs, \
unsigned short wXe, unsigned short wYe);
void (*Flush)(struct DisplayDevice *ptDev); /* 把FBBase的数据刷到LCD的显存里 */
/* 设置FBBase中的数据, 把(iX,iY)的像素设置为颜色dwColor
* dwColor的格式:0x00RRGGBB
*/
int (*SetPixel)(struct DisplayDevice *ptDev, \
unsigned short wX, unsigned short wY, \
unsigned short wColor);
struct DisplayDevice *pNext;
}DisplayDevice, *PDisplayDevice;
开发者需要在驱动程序中实现此结构体:设置里面的参数(比如分辨率)、函数指针。本工程实现的结构体如下:
static DisplayDevice gLcdDevice = {
.name = "LCD",
.FBBase = gLcdFbuf,
.wXres = 320,
.wYres = 480,
.wBpp = 16,
.dwSize = 320*480*16/8,
.Init = LCDDrvInit,
.DisplayON = LCDDrvSetDisplayOn,
.DisplayOFF = LCDDrvSetDisplayOff,
.SetDisplayWindow = LCDDrvSetDisplayWindow,
.Flush = LCDDrvFlush,
.SetPixel = LCDDrvSetPixel
};
第二个成员FBBase指向的数组,需要根据显示器的特性来确定,比如本实验的ST7796s,它的一个像素由16bit数据组成,全屏有320480个像素,因而就需要320480*16/8个字节的数组来表示显存在处理器内存中的映射,如下所示:
static unsigned short gLcdFbuf[320*480];
本实验已经实现的操作函数将会在后文进行介绍。
- 获取显示设备函数
出于良好的编程习惯,将显示设备结构体定义为了一个静态的全局变量,上层代码需要一个接口来获取这个结构体:
struct DisplayDevice *LCDGetDevice(void)
{
return &gLcdDevice;
}
此函数返回一个DisplayDevice指针,上层应用通过它来操作显示设备。
- 显示器的开启和关闭函数
这两个操作函数比较简单,就是向ST7796s发送0x28/0x29指令即可,代码如下:
void LCDDrvSetDisplayOn(struct DisplayDevice* ptDev)
{
if(NULL == ptDev->name) return;
LCDDrvWriteReg(0x29);
}
void LCDDrvSetDisplayOff(struct DisplayDevice* ptDev)
{
if(NULL == ptDev->name) return;
LCDDrvWriteReg(0x28);
}
- 设置显示区域函数
通过前文已知,设置显示区域就是设置显示行、列的起始地址、结束地址,先发地址高8位再发地址低8位的规则,封装得到了如下代码的函数:
void LCDDrvSetDisplayWindow(struct DisplayDevice* ptDev, \
unsigned short hwXs, unsigned short hwYs, \
unsigned short hwXe, unsigned short hwYe)
{
if(NULL == ptDev->name) return;
/* 设置列地址 */
LCDDrvWriteReg(0x2A);
LCDDrvWriteDat((uint8_t)(hwXs>>8)); // 起始地址先高后低
LCDDrvWriteDat((uint8_t)(0x00FF&hwXs));
LCDDrvWriteDat((uint8_t)(hwXe>>8)); // 结束地址先高后低
LCDDrvWriteDat((uint8_t)(0x00FF&hwXe));
/* 设置行地址 */
LCDDrvWriteReg(0x2B);
LCDDrvWriteDat((uint8_t)(hwYs>>8));
LCDDrvWriteDat((uint8_t)(0x00FF&hwYs));
LCDDrvWriteDat((uint8_t)(hwYe>>8));
LCDDrvWriteDat((uint8_t)(0x00FF&hwYe));
}
- 全屏刷新函数
此函数用于将设备结构体里FBBase的所有数据,一次性发送给屏幕,用来刷新整个屏幕,代码如下:
void LCDDrvFlush(struct DisplayDevice *ptDev)
{
if(NULL == ptDev->name) return;
LCDDrvWriteBuf((uint8_t*)ptDev->FBBase, (uint32_t)ptDev->dwSize);
}
- 设置像素点函数
在有些应用场景下会对某个或者某几个像素点进行单独操作,来显示指定图像,因而需要实现一个单独像素点设置的接口以供使用,代码如下所示:
int LCDDrvSetPixel(struct DisplayDevice *ptDev, \
unsigned short wX, unsigned short wY, \
unsigned short wColor)
{
if(NULL == ptDev->name) return -1;
if (wX >= ptDev->wXres || wY >= ptDev->wYres)
return -1;
unsigned short *buf = (unsigned short*)ptDev->FBBase;
buf[wY * ptDev->wXres + wX] = (unsigned short)wColor;
return 0;
}
像素点位置的偏移根据屏幕的分辨率和显示模式决定,本章的计算公式不一定适合所有的屏幕,读者移植使用的时候需要注意。
- 屏幕初始化函数
本次实验初始化屏幕设置的参数比较简单:打开SPI->硬件复位->唤醒设备->设置颜色格式->开启显示->点亮背光。代码如下:
void LCDDrvInit(struct DisplayDevice* ptDev)
{
if(NULL == ptDev->name) return;
/* 打开SPI设备完成初始化 */
fsp_err_t err = g_spi0.p_api->open(&g_spi0_ctrl, &g_spi0_cfg);
if(FSP_SUCCESS == err)
printf("Success to open device:\tspi0\r\n");
else
printf("Failed to open device:\tspi0\r\n");
/* 初始化屏幕设备 */
LCDDrvHWReset(); //LCD 复位
LCDDrvWriteCS(isSelect);
LCDDrvWriteBlack(isLight);//点亮背光
LCDDrvWriteReg(0x11);
LCDDrvWriteReg(0x20);
LCDDrvWriteReg(0x36);
LCDDrvWriteDat(0x40);
LCDDrvWriteReg(0x3A);
LCDDrvWriteDat(0x55);
LCDDrvWriteReg(0x13);
LCDDrvWriteReg(0x29);
}
8.3.5 显示屏测试程序
本次实验的测试程序有两个功能:清屏和画圆。测试程序在app_disp.c文件中实现,在app.h中声明。测试程序代码如下:
#define FLOYRGB565(r, g, b) ((unsigned short)((((unsigned short)(r>>3)<<11)|(((unsigned short)(g>>2))<<5)|((unsigned short)b>>3))))
void DispAppTest(void)
{
DisplayDevice *ptDispDev = LCDGetDevice();
if(NULL == ptDispDev)
{
printf("Failed to get LCD device!\r\n");
return;
}
/* 初始化显示设备 */
ptDispDev->Init(ptDispDev);
/* 设置屏幕显示区域 */
ptDispDev->SetDisplayWindow(ptDispDev, 0, 0, ptDispDev->wXres - 1, ptDispDev->wYres - 1);
/* 清除屏幕 */
memset((uint8_t*)ptDispDev->FBBase, 0x00, ptDispDev->dwSize);
ptDispDev->Flush(ptDispDev);
/* 画一个实心圆 */
uint16_t x = 0, y = 0, r = 100;
for(x = ((ptDispDev->wXres>>1) - r); x<((ptDispDev->wXres>>1) + r); x++)
{
for(y = ((ptDispDev->wYres>>1) - r); y<((ptDispDev->wYres>>1) + r); y++)
{
if(((x-(ptDispDev->wXres>>1)) * (x-(ptDispDev->wXres>>1))+(y-(ptDispDev->wYres>>1)) * (y-(ptDispDev->wYres>>1))) <= r*r)
{
ptDispDev->SetPixel(ptDispDev, x, y, FLOYRGB565(0, 255, 0));
}
}
}
ptDispDev->Flush(ptDispDev);
}
- 第01行:使用宏函数将RGB颜色转换为16bit的颜色值;
- 第15~16行:清屏;
- 第19~30行:在屏幕中心画一个半径为100像素点的实心圆;
随后在hal_entry.c中的hal_entry()函数调用各设备初始化函数以及这个圆圆函数,即可在屏幕上显示一个填充的黑色圆,代码如下:
#include "drv_uart.h"
#include "app.h"
#include "hal_data.h"
void hal_entry(void)
{
/* TODO: add your own code here */
UARTDrvInit();
DispAppTest();
}
1.3.6 上机实验
将编译生成的可执行二进制文件烧入到芯片中后,通过串口可以得到如下打印信息:
Success to open device: uart7
Success to open device: spi0
观察屏幕可以看到一个填充圆。


![[XSCTF]easyxor](https://img-blog.csdnimg.cn/5ae276a2b4f741629aa1354e7cf4a914.png)