本教程基于韦东山百问网出的 DShanMCU-RA6M5开发板 进行编写,需要的同学可以在这里获取: https://item.taobao.com/item.htm?id=728461040949
配套资料获取:https://renesas-docs.100ask.net
瑞萨MCU零基础入门系列教程汇总: https://blog.csdn.net/qq_35181236/article/details/132779862
第6章 串行通信接口(SCI)
本章目标
- 了解串行通信协议
- 了解SCI模块内部原理
6.1 协议介绍
6.1.1 通信的基本概念
一个嵌入式产品由许多元器件组成的,它们之间要互相协作,相互之间要进行通信。不同的元器件支持的通信方式是不同的,有的是串行的,有的是并行的;有的是同步的,有的是异步的。
本小节介绍一些常见的通信概念。
- 单工、半双工和全双工通信
- 按照数据传输的方向,通信可以分为全双工、半双工和单工;
- 全双工:双方之间、两个方向的数据都可以同时发送;
- 半双工:双方之间、两个方向的数据都可以发送,但是同一时刻只能一方发送信息;
- 单工:只能一方发信息,一方接受信息,通信是单向的。
全双工就像电话通信,双方任意时刻都可以同时说话、听到声音;半双工就像对讲机通信,两边不能同时说话;单工就像收音机,只能由广播站发送给收音机,是单向的。如图所示:

- 串行通信和并行通信
照数据传输的方式,通信可以分为串行通信和并行通信。串行通信简单的说就是数据依次传输,比如要传输0b11111111,一位一位的发送,需要发送8次。并行通信则是几个数据一起传输,同样是0b11111111,如果8位一起发送,只需要发送1次,如图所示:

由此可见,串行传输占用的通信线更少,成本低,通信速度相对较慢;并行传输占用的通信线多,成本高,通信速度相对更快。但随着对传输速度要求越来越高,并行传输开始出现信号之间的干扰,串行通信反而受干扰影响较小,之后又发展出差分传输等技术,极大地提高了串行传输速率,使得串行通信速度可能比并行通信速度更快。
串行通信就像单车道,行驶的车辆需要依次行驶。并行通信就像多车道,同时多辆汽车并排行驶。但当车速很快的时候,多车道上并列行驶的汽车之间会形成“气流”相互干扰,单车道则受影响较小,速度能够进一步提升。
- 同步通信和异步通信
按每一位数据的传输方式,可以分为同步通信和异步通信。数据在双方之间传输时,需要制定规则约定怎样传输一位数据,在这个基础上再约定怎样传输一个数据包。
同步通信的做法是加一个时钟信号,发送方和接收方在这个时钟的节拍下传输数据,比如常见的SPI、I2C。数据发起方会发出时钟信号,用来通知对方:你要接收数据了。对方可以在时钟信号的上升沿或下降沿采样数据。如下图所示:

对于异步通信,无需时钟信号,但是双方要遵守相同的约定:怎么表示起始信号、停止信号,怎么表示一位数据。如下图所示:

有多种异步通信协议,以红外遥控器的信号为例:
① 起始信号:遥控器发出一个9ms的低电平、4.5ms的高电平。接收器检测到这样的信号后,就知道要准备接收数据了

② 接下来就可以传输若干位的数据了,怎么表示每一位的数据呢?每一位数据都以0.56ms的低脉冲开始,随后是高脉冲:高脉冲为0.56ms时表示这位数据为0,高脉冲为1.69ms时表示这位数据为1。如下图所示:

因此,可以通过这样简单判断:有时钟信号的是同步通信,否则是异步通信。
- 通信的速率
对于同步通信,通信速率由时钟信号决定,时钟信号越快,传输速度就越快。
对于异步通信,需要收发双方提前约定速率,这也就是我们串口调试时,波特率不对显示乱码的原因。
通常使用比特率来描述通信速率的快慢,与之容易混淆的是波特率。
-
比特率(Bitrate):系统在单位时间内传输的比特位(二进制0或1)个数,通常用Rb表示,单位是比特/秒(bit/s),缩写为bps;
-
波特率(Baudrate):系统在单位时间内传输的码元个数,通常用RB表示,单位是波特(Bd);
100bit/s即是一秒钟传输100个0或1,100Bd即是一秒钟传输100个码元。
码元就是“承载信息量的基本信号单位”,以一条电线上传输的信号为例,码元就是电线上的电平值。
如果电线上电平只有0和3.3V两种选择,传输的信号是这2种电平之一,码元的状态只有2种。接收方可以把0V认为是二进制的0,把3.3V认为是二进制1。即:传输1个码元时,能用来表示1位数据。
如果电线上电平有0V、3.3V、5V、12V四种选择,传输的信号是这4种电平之一,码元的状态有4种。接收方可以把这4个电平认为是二级制的4个值:00、01、10、11。即:传输1个码元时,能用来表示2位数据。
因此码元状态为2时,比特率等于波特率,码元状态越多,每次传输的码元能携带的信息越多,自然速率也越高。
码元有N个状态时,比特率与波特率的关系式:

- 常见通信协议
在嵌入式中,有众多通信协议,往往从性能、成本、稳定性、易用性等角度考虑选择合适的协议。常见的通信协议如下所示:

6.1.2 UART协议
通用异步收发器简称UART,即“Universal Asynchronous Receiver Transmitter”,它用来传输串行数据:发送数据时,CPU将并行数据写入UART,UART按照一定的格式在一根电线上串行发出;接收数据时,UART检测另一根电线上的信号,将串行数据收集放在缓冲区中,CPU即可读取UART获得这些数据。UART之间以全双工方式传输数据,最精简的连线方法只有三根电线:TxD用于发送数据,RxD用于接收数据,GND用于给双方提供参考电平,连线如图所示:

UART使用标准的TTL/CMOS逻辑电平(0~5V、0~3.3V、0~2.5V或0~1.8V四种)来表示数据,高电平表示1,低电平表示0。进行长距离传输时,为了增强数据的抗干扰能力、提高传输长度,通常将TTL/CMOS逻辑电平转换为RS-232逻辑电平,3~12V表示0,-3~-12V表示1。
TxD、RxD数据线以“位”为最小单位传输数据。帧(frame)由具有完整意义的、不可分割的若干位组成,它包含开始位、数据位、较验位(需要的话)和停止位。发送数据之前,UART之间要约定好数据的传输速率(即每位所占据的时间,其倒数称为波特率)、数据的传输格式(即有多少个数据位、是否使用较验位、是奇较验还是偶较验、有多少个停止位)。
数据传输流程如下:
- 平时数据线处于“空闭”状态(1状态)。
- 当要发送数据时,UART改变TxD数据线的状态(变为0状态)并维持1位的时间──这样接收方检测到开始位后,再等待1.5位的时间就开始一位一位地检测数据线的状态得到所传输的数据。
- UART一帧中可以有5、6、7或8位的数据,发送方一位一位地改变数据线的状态将它们发送出去,首先发送最低位。
- 如果使用较验功能,UART在发送完数据位后,还要发送1个较验位。有两种较验方法:奇较验、偶较验──数据位连同较验位中,“1”的数目等于奇数或偶数。
- 最后,发送停止位,数据线恢复到“空闭”状态(1状态)。停止位的长度有3种:1位、1.5位、2位。
下图演示了UART使用7个数据位、偶较验、2个停止位的格式传输字符“A”(二进制值为0b1000001)时,TTL/CMOS逻辑电平、RS-232逻辑电平对应的波形。

6.1.3 I2C协议
- I2C总线的概念
I2C(Inter-Integrated Circuit,又称IIC)总线是一种由PHILIPS公司开发的串行总线,用于连接微控制器及其外围设备,它具有如下特点:
- 只有两条总线线路:一条串行数据线(SDA),一条串行时钟线(SCL)。
- 每个连接到总线的器件都可以使用软件根据它的惟一的地址来识别。
- 传输数据的设备间是简单的主/从关系。
- 主机可以用作主机发送器或主机接收器。
- 它是一个真正的多主机总线,两个或多个主机同时发起数据传输时,可以通过冲突检测和仲裁来防止数据被破坏。
- 串行的8 位双向数据传输,位速率在标准模式下可达100kbit/s,在快速模式下可达400kbit/s,在高速模式下可达3.4Mbit/s。
- 片上的滤波器可以增加抗干扰功能,保证数据的完整。
- 连接到同一总线上的IC 数量只受到总线的最大电容400pF的限制。
下图是一条I2C总线上多个设备相连的例子。

先说明一些术语,如下表所示。
- 发送器:发送数据到总线的器件
- 接收器:从总线接收数据的器件
- 主机:发起/停止数据传输、提供时钟信号的器件
- 从机:被主机寻址的器件
- 多主机:可以有多个主机试图去控制总线,但是不会破坏数据
- 仲裁:当多个主机试图去控制总线时,通过仲裁可以使得只有一个主机获得总线控制权,并且它传输的信息不被破坏
- 同步:多个器件同步时钟信号的过程
- I2C总线的形象类比
在讲解协议细节前,先使用生活示例形象理解I2C协议:

体育老师:可以把球发给学生,也可以把球从学生中接过来。
- 老师想发球时,步骤如下:

- 老师想接球时,步骤如下:

依照这个简单的例子,可以引入IIC的传输协议:
① 老师说开始了,表示开始信号(start)
② 老师提醒某个学生要发球,表示发送地址和方向(address/read/write)
③ 老师发球/接球,表示数据的传输
④ 到球要回应:回应信号(ACK)
⑤ 老师说结束,表示IIC传输结束§
- I2C总线的信号类型
I2C总线在传送数据过程中共有三种类型信号:开始信号、结束信号和响应信号。
- 开始信号(S):SCL为高电平时,SDA由高电平向低电平跳变,开始传送数据。
- 结束信号§:SCL为低电平时,SDA由低电平向高电平跳变,结束传送数据。
- 响应信号(ACK):接收器在接收到8位数据后,在第9个时钟周期,拉低SDA电平。
它们的波形如图所示:

SDA上传输的数据必须在SCL为高电平期间保持稳定,SDA上的数据只能在SCL为低电平期间变化,如图所示。

- I2C总线的数据传输格式:
发送到SDA线上的每个字节必须是8位的,每次传输可以发送的字节数量不受限制。每个字节后必须跟一个响应位。首先传输的是数据的最高位(MSB)。如果从机要完成一些其他功能后(例如一个内部中断服务程序)才能继续接收或发送下一个字节,从机可以拉低SCL迫使主机进入等待状态。当从机准备好接收下一个数据并释放SCL后,数据传输继续。如果主机在传输数据期间也需要完成一些其他功能(例如一个内部中断服务程序)也可以拉低SCL以占住总线。
启动一个传输时,主机先发出S信号,然后发出8位数据。这8位数据中前7位为从机的地址,第8位表示传输的方向(0表示写操作,1表示读操作)。被选中的从机发出响应信号。紧接着传输一系列字节及其响应位。最后,主机发出P信号结束本次传输。
下图是几种I2C总线上数据传输的格式。

并非每传输8位数据之后,都会有ACK信号。有以下3种例外:
a) 当从机不能响应从机地址时(例如它正忙于其他事而无法响应I2C总线的操作,或者这个地址没有对应的从机),在第9个SCL周期内SDA线没有被拉低,即没有ACK信号。这时,主机发出一个P信号终止传输或者重新发出一个S信号开始新的传输。
b) 如果从机接收器在传输过程中,不能接收更多的数据时,它也不会发出ACK信号。这样,主机就可以意识到这点,从而发出一个P信号终止传输或者重新发出一个S信号开始新的传输。
主机接收器在接收到最后一个字节后,也不会发出ACK信号。于是,从机发送器释放SDA线,以允许主机发出P信号结束传输。
6.1.4 SPI协议
SPI(Serial Peripheral Interface,串行外设接口)是由摩托罗拉(Motorola)在1980前后提出的一种全双工同步串行通信接口,它用于MCU与各种外围设备以串行方式进行通信以交换信息,通信速度最高可达25MHz以上。
SPI接口主要应用在EEPROM、FLASH、实时时钟、网络控制器、OLED显示驱动器、AD转换器,数字信号处理器、数字信号解码器等设备之间。
SPI通常由四条线组成,一条主设备输出与从设备输入(Master Output Slave Input,MOSI),一条主设备输入与从设备输出(Master Input Slave Output,MISO),一条时钟信号(Serial Clock,SCLK),一条从设备使能选择(Chip Select,CS)。假设现在主控芯片要传输一个0x56数据给SPI Flash,时序如下:

首先拉低CS0选中SPI Flash,0x56的二进制就是0b0101 0110,因此在每个SCK时钟周期,DO输出对应的电平。SPI Flash会在每个时钟周期的上升沿读取D0上的电平.
SPI和I²C对比如下表所示。SPI可以同时发出和接收数据,因此SPI的理论传输速度比I²C更快。SPI通过片选引脚选择从机,一个片选一个从机,因此在多从机结构中,需要占用较多引脚,而I²C通过设备地址选择从机,只要设备地址不冲突,始终只需要两个引脚。
| 功能说明 | SPI总线 | I2C总线 |
|---|---|---|
| 通信方式 | 同步 串行 全双工 | 同步 串行 半双工 |
| 通信速度 | 一般50MHz以下 | 100KHz、400KHz、3.4MHz |
| 从设备选择 | 引脚片选 | 设备地址片选 |
| 总线接口 | MOSI、MISO、SCK、CS | SDA、SCL |
- SPI的物理拓扑结构
SPI可以一个主机连接单个或多个从机,每个从机都使用一个引脚进行片选,物理连接示意图如图所示:

- SPI的数据交换
在SCK时钟周期的驱动下,主机把数据驱动到MOSI上传给从机,从机把数据驱动到MISO上传给主机,如下图所示。

主机发送N字节给从机时,必定能接收到N字节,至于接收到的N字节是否有意义由从机决定。如果主机只想对从机进行写操作,主机只需忽略接收的从机数据即可。如果主机只想读取从机数据,它也要发送数据给从机(发送的数据可以是空数据)。
- SPI的传输模式
SPI有四种传输模式,如下表所示,主要差别在于CPOL和CPHA的不同。
- CPOL(Clock Polarity,时钟极性)表示SCK在空闲时为高电平还是低电平。当CPOL=0,SCK空闲时为低电平,当CPOL=1,SCK空闲时为高电平。
- CPHA(Clock Phase,时钟相位)表示SCK在第几个时钟边缘采样数据。当CPHA=0,在SCK第一个边沿采样数据,当CPHA=1,在SCK第二个边沿采样数据。
| SPI模式 | CPOL | CPHA | 说明 |
|---|---|---|---|
| 0 | 0 | 0 | 时钟空闲状态为低电平;在时钟第一个边沿(上升沿)采样数据 |
| 1 | 0 | 1 | 时钟空闲状态为低电平;在时钟第二个边沿(下降沿)采样数据 |
| 2 | 1 | 0 | 时钟空闲状态为高电平;在时钟第一个边沿(下降沿)采样数据 |
| 3 | 1 | 1 | 时钟空闲状态为高电平;在时钟第二个边沿(上升沿)采样数据 |
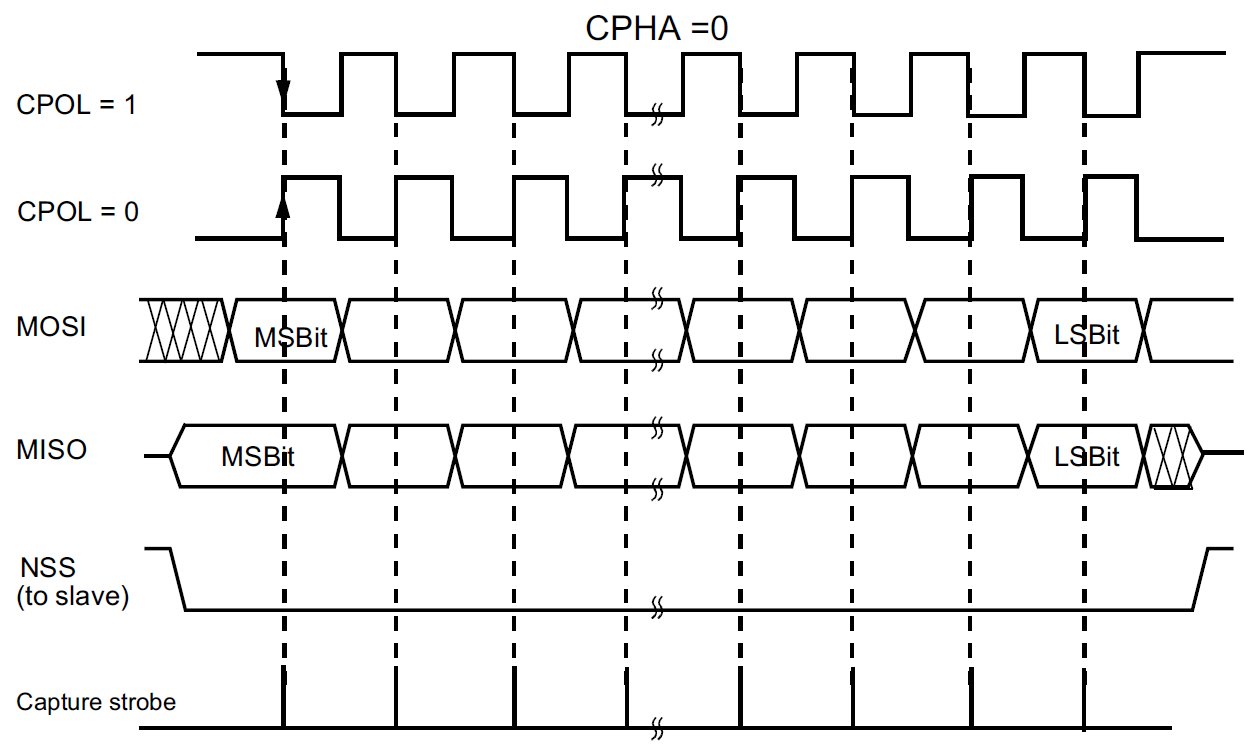
如下图所示,CPHA=0时,表示在时钟第一个时钟边沿采样数据。当CPOL=1,即空闲时为高电平,从高电平变为低电平,第一个时钟边沿(下降沿)即进行采样。当CPOL=0,即空闲时为低电平,从低电平变为高电平,第一个时钟边沿(上升沿)即进行采样。
- CPHA=1时,表示在时钟第二个时钟边沿采样数据。
- 当CPOL=1,即空闲时为高电平,从高电平变为低电平再变为高电平,第二个时钟边沿(上升沿)即进行采样。
- 当CPOL=0,即空闲时为低电平,从低电平变为高电平再变为低电平,第二个时钟边沿(下降沿)即进行采样,如图所示:

6.2 SCI模块
6.2.1 概述
SCI的含义是“Serial Communications Interface”,即串行通信接口,它的结构图如下:
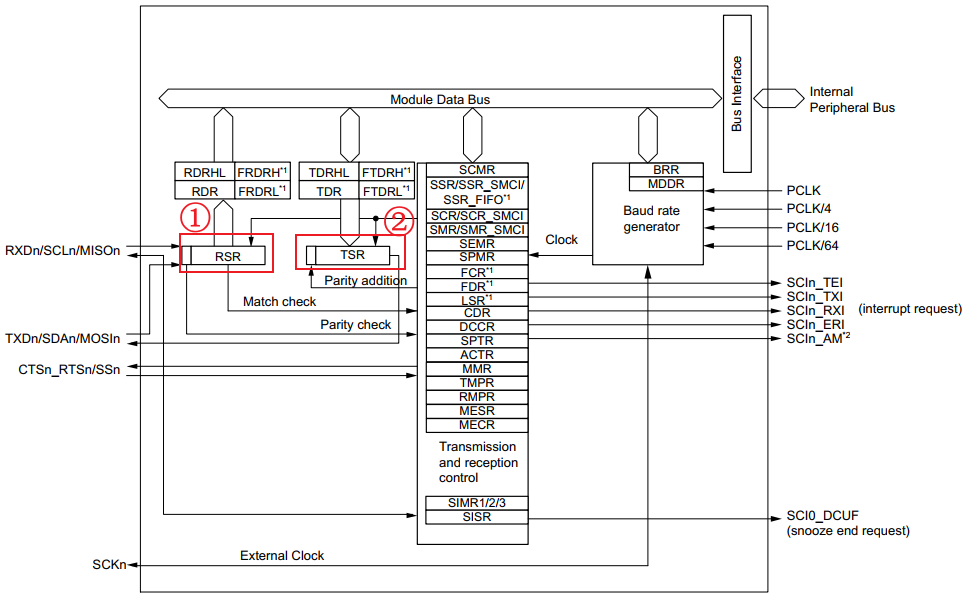
上图的“PSR”含义为“Receive Shift Register”,即“接收移位寄存器”,它可以接收一位一位的数据,组合好后保存在上面的RDR寄存器里供程序读取。“RDR”含义为“Receive Data Register”,即接收数据寄存器。
“TSR”含义为“Transmit Shift Register”,即“发送移位寄存器”。程序把数据写到TDR寄存器后,里面的数据就经过TSR一位一位地发送出去。“TDR”含义为“Transmit Data Register,”即发送数据寄存器。
正因为SCI模块里有PSR、TSR移位寄存器,再结合其他控制单元(比如引脚、时钟、波特率产生器),就可以支持多种串行协议,比如UART、I2C、SPI、Smart Card等。
以UART、I2C、SPI为例,它们的硬件实现里都用到了“移位寄存器”,对比如下:
| UART | I2C | SPI | |
|---|---|---|---|
| 时钟信号 | 无 | 有 | 有 |
| 数据信号 | TXD、RXD两条 | SDA一条 | MOSI、MISO两条 |
| 片选信号 | 无 | 无 | 有 |
| 速率 | 双方事先约定 | 由时钟信号决定 | 由时钟信号决定 |
| 通过移位寄存器发送 | 是 | 是 | 是 |
| 通过移位寄存器接收 | 是 | 是 | 是 |
6.2.2 使用方法
RA6M5芯片的SCI模块有10个SCI通道,每个通道能支持的协议(也被称为模式)如下表所示:
| 模式 | SCI0、SCI5~SCI9 | SCI3、SCI4 | SCI1、SCI2 |
|---|---|---|---|
| Asynchronous 异步模式 | 支持 | 支持 | 支持 |
| Clock synchronous 时钟同步模式 | 支持 | 支持 | 支持 |
| Smart cardinterface | 支持 | 支持 | 支持 |
| Simple I2C 简化版本的I2C | 支持 | 支持 | 支持 |
| Simple SPI 简化版本的SPI | 支持 | 支持 | 支持 |
| FIFO 模式 | 支持 | 支持 | 不支持 |
| Address match 地址匹配 | 支持 | 支持 | 不支持 |
| Manchester mode | 不支持 | 支持 | 不支持 |
| Extended serial | 不支持 | 不支持 | 支持 |
| GPT clock input | 不支持 | 不支持 | 支持 |
使用SCI模块时,步骤如下:
① 查看原理图,确定引脚
根据引脚编号在芯片手册里找到引脚名,如果引脚名里有“TXDn”、“RXDn”字样更好。比如对于下面的原理图,使用P100作为SPI的MISO引脚:

在芯片手册的《1.7 Pin Lists》中查找P100,得到它的引脚名“RXD0/SCK1/MISOB_A/QSPCLK/OM_SCLK”,如下所示:

② 根据引脚名确定使用哪个SCI通道
SCIn通道使用TXDn、RXDn引脚,所以可以根据TXDn或RXDn的编号确定SCI通道。
以P100引脚为例,它的引脚名里含有“RXD0”,就表示这个引脚可以连接到SCI模块的通道0;再根据表6.5可以知道SCI0支持“Simple SPI”,以后就可以使用RASC配置SCI0工作于“Simple SPI”模式,并选择P100这些引脚。
怎么使用RASC进行配置、怎么编写程序,在后续章节讲解。
6.2.3 与其他模块的关系
以I2C、SPI为例,可以使用SCI模块实现这些功能,也可以使用单独的I2C模块、SPI模块实现这些功能。SCI模块和I2C、SPI模块是并列的关系,如下图所示:
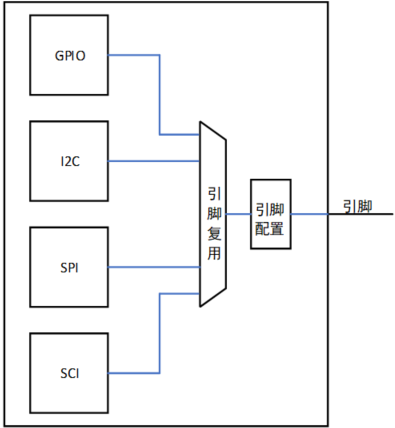
当引脚连接到SCI模块时,SCI可以工作于“Simple I2C”、“Simple SPI”模式。如果想使用更完善的I2C、SPI功能,需要配置这些引脚连接到专门的I2C模块、SPI模块。
以P100为例,它的引脚名为“RXD0/SCK1/MISOB_A/QSPCLK/OM_SCLK”,解析如下:
- RXD0:可以连接到SCI0通道,用作RXD0信号,SCI0可被配置为UART、I2C、SPI等模式
- SCK1:可以连接到SCI1通道,用作SCK1信号,SCI1被配置为SPI模式时用到SCK1
- MISOB_A:可以连接到SPIB通道,用作MISO引脚
- QSPCLK:可以连接到QSPI模块(有4条数据线的、类似SPI的协议)
- OM_SCLK:可以连接到OSPI模块(有8条数据线的、类似SPI的协议)
需要注意的是,引脚被连接到I2C模块,或者被连接到SCI模块并工作于“Simple I2C”模式时,这些引脚的功能是相反的。比如I2C1模块使用P511作为SDA引脚,使用P512作为SCL引脚;但是SCI4通道工作于“Simple I2C”模式时刚好反过来,它使用P511作为SCL引脚,使用P512作为SDA引脚。

![[XSCTF]easyxor](https://img-blog.csdnimg.cn/5ae276a2b4f741629aa1354e7cf4a914.png)