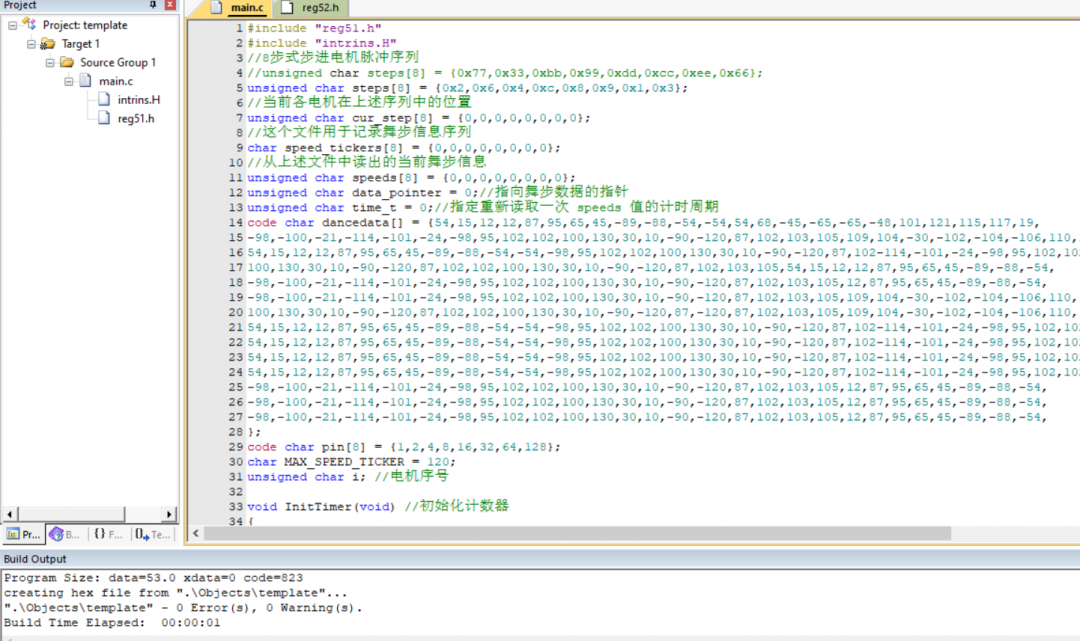
程序运行图:
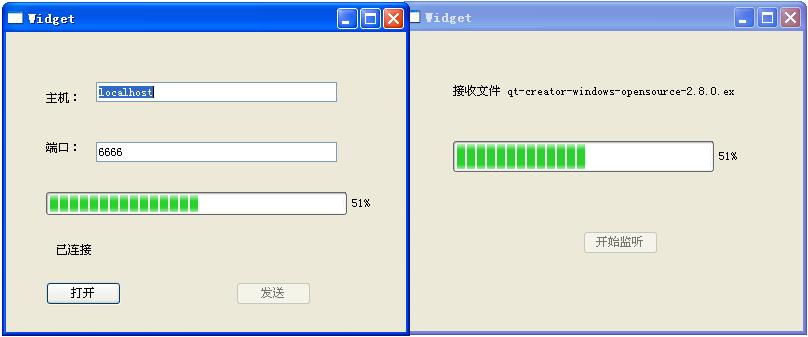
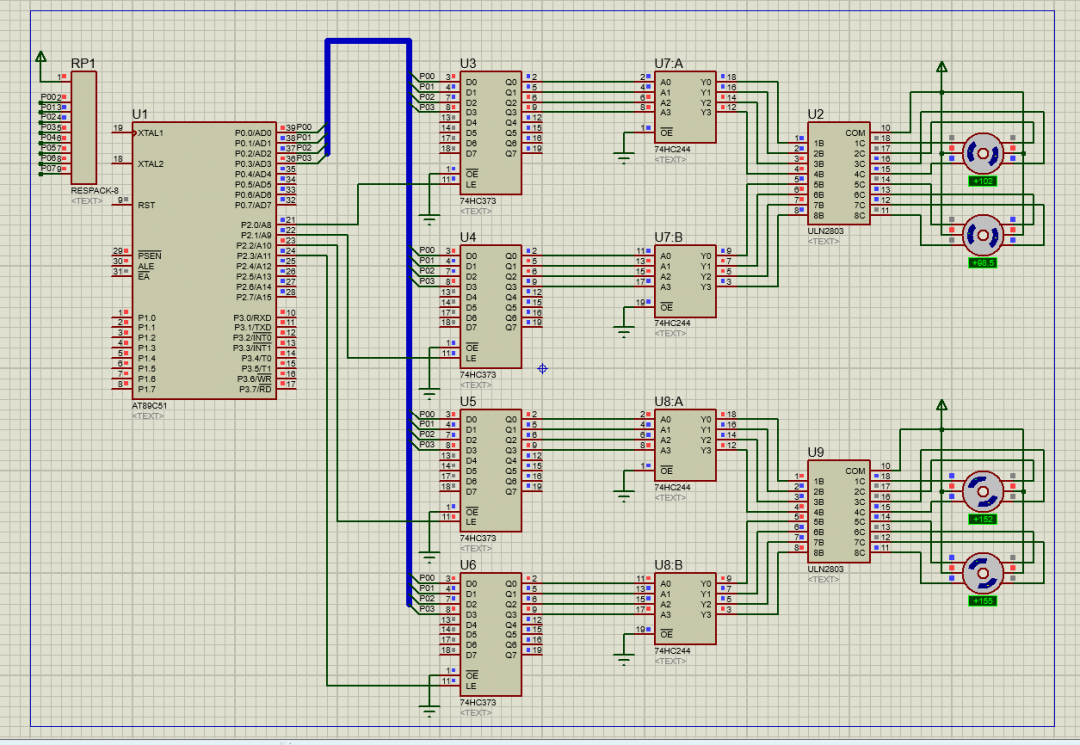
仿真原理图:
部分程序:
#include "reg51.h"
#include "intrins.H"
//8步式步进电机脉冲序列
//unsigned char steps[8] = {0x77,0x33,0xbb,0x99,0xdd,0xcc,0xee,0x66};
unsigned char steps[8] = {0x2,0x6,0x4,0xc,0x8,0x9,0x1,0x3};
//当前各电机在上述序列中的位置
unsigned char cur_step[8] = {0,0,0,0,0,0,0,0};
//这个文件用于记录舞步信息序列
char speed_tickers[8] = {0,0,0,0,0,0,0,0};
//从上述文件中读出的当前舞步信息
unsigned char speeds[8] = {0,0,0,0,0,0,0,0};
unsigned char data_pointer = 0;//指向舞步数据的指针
unsigned char time_t = 0;//指定重新读取一次 speeds 值的计时周期
code char dancedata[] = {54,15,12,12,87,95,65,45,-89,-88,-54,-54,54,68,-45,-65,-65,-48,101,121,115,117,19,
-98,-100,-21,-114,-101,-24,-98,95,102,102,100,130,30,10,-90,-120,87,102,103,105,109,104,-30,-102,-104,-106,110,100,
54,15,12,12,87,95,65,45,-89,-88,-54,-54,-98,95,102,102,100,130,30,10,-90,-120,87,102-114,-101,-24,-98,95,102,102,
100,130,30,10,-90,-120,87,102,102,100,130,30,10,-90,-120,87,102,103,105,54,15,12,12,87,95,65,45,-89,-88,-54,
-98,-100,-21,-114,-101,-24,-98,95,102,102,100,130,30,10,-90,-120,87,102,103,105,12,87,95,65,45,-89,-88,-54,
-98,-100,-21,-114,-101,-24,-98,95,102,102,100,130,30,10,-90,-120,87,102,103,105,109,104,-30,-102,-104,-106,110,
100,130,30,10,-90,-120,87,102,102,100,130,30,10,-90,-120,87,-120,87,102,103,105,109,104,-30,-102,-104,-106,110,
54,15,12,12,87,95,65,45,-89,-88,-54,-54,-98,95,102,102,100,130,30,10,-90,-120,87,102-114,-101,-24,-98,95,102,102,
54,15,12,12,87,95,65,45,-89,-88,-54,-54,-98,95,102,102,100,130,30,10,-90,-120,87,102-114,-101,-24,-98,95,102,102,
54,15,12,12,87,95,65,45,-89,-88,-54,-54,-98,95,102,102,100,130,30,10,-90,-120,87,102-114,-101,-24,-98,95,102,102,
54,15,12,12,87,95,65,45,-89,-88,-54,-54,-98,95,102,102,100,130,30,10,-90,-120,87,102-114,-101,-24,-98,95,102,102,
-98,-100,-21,-114,-101,-24,-98,95,102,102,100,130,30,10,-90,-120,87,102,103,105,12,87,95,65,45,-89,-88,-54,
-98,-100,-21,-114,-101,-24,-98,95,102,102,100,130,30,10,-90,-120,87,102,103,105,12,87,95,65,45,-89,-88,-54,
-98,-100,-21,-114,-101,-24,-98,95,102,102,100,130,30,10,-90,-120,87,102,103,105,12,87,95,65,45,-89,-88,-54,
};
code char pin[8] = {1,2,4,8,16,32,64,128};
char MAX_SPEED_TICKER = 120;
unsigned char i; //电机序号
void SetAllSpeeds(void) //设置各电机的速度,并让它运动起来
{
char delta; //旋转方向 1:正 -1:反 0:停
for(i=0;i<8;i++)
{
P2=pin[i]; //发送锁存信号
speed_tickers[i] += speeds[i]; //计数值增加 speed[i]越高,增加得越多
if(speed_tickers[i] >= MAX_SPEED_TICKER) //如果计数值超过预定最大值,就发送脉冲
{
speed_tickers[i] = 0;
delta = 1;
}
{
speed_tickers[i] = 0;
delta = -1;
}
else delta = 0;
cur_step[i] += delta;
cur_step[i] &= 0x07; //计算当前应发脉冲
P0 = steps[cur_step[i]];
P2 = 0;
}
}
void main() //程序的入口
{
InitTimer(); //初始化后等中断
while(1);
}
资料包括:
需要完整的资料可在我的资源里下载,也可以加入我的纷传圈子,里面有资源压缩包的百度网盘下载地址及提取码。
纷传点击用微信打开即可,过程有点繁琐请见谅。