边界矩形传感器提供了关于传感器可检测物体的边界矩形的信息,并作为对摄像机输入的边界矩形算法的参考。一个例子是行人识别算法,该算法用于检测夜间、雾、雨或雪等恶劣照明条件下的行人。输出的检测到的边界矩形是按距离排序的--最近的在前。

注意:边界矩形传感器不检测(或传感器可检测)线的位置。
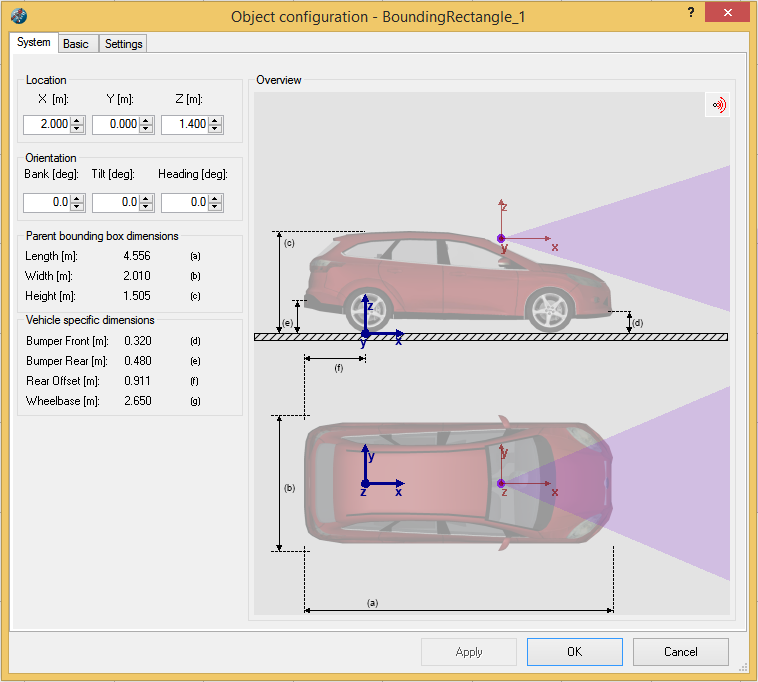
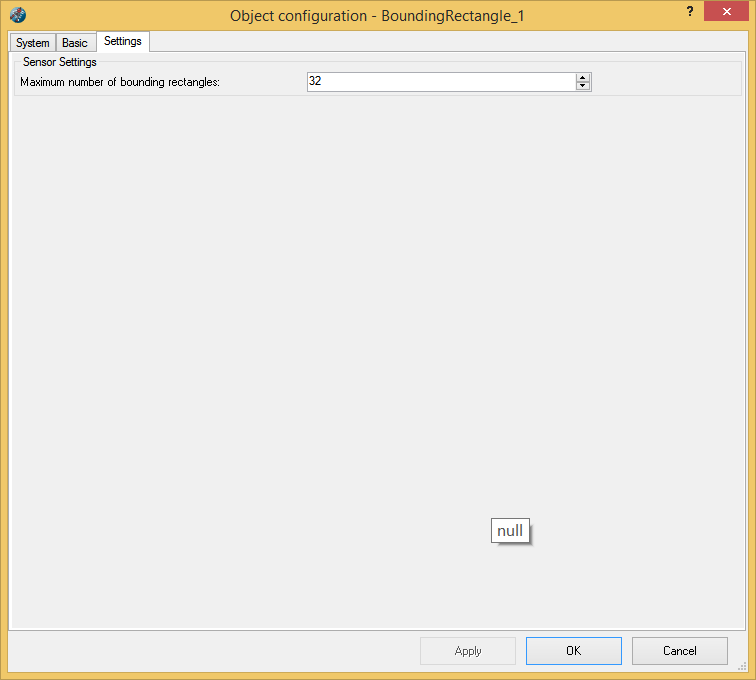
边界矩形传感器与其他传感器一样被处理。它可以被连接到任何物体上(在上面的例子中是一辆汽车)。位置和高度可以在系统标签中设置。分辨率、帧速率和视场(FoV)可以在基本选项卡中设置。设置选项卡提供了对最大边界矩形数的控制。
边界矩形的最大数量:传感器测量的最大边界矩形数
边界矩形将根据 "遮蔽 "来计算。遮挡模式执行一个渲染步骤,允许它确定物体是否(部分)被遮挡,要么是被其他物体遮挡,要么是被摄像机外壳的边缘所遮挡。

![[前端面试题]flex上下布局](https://img-blog.csdnimg.cn/f4fe46cee4b941029b169a853ea7531d.png)

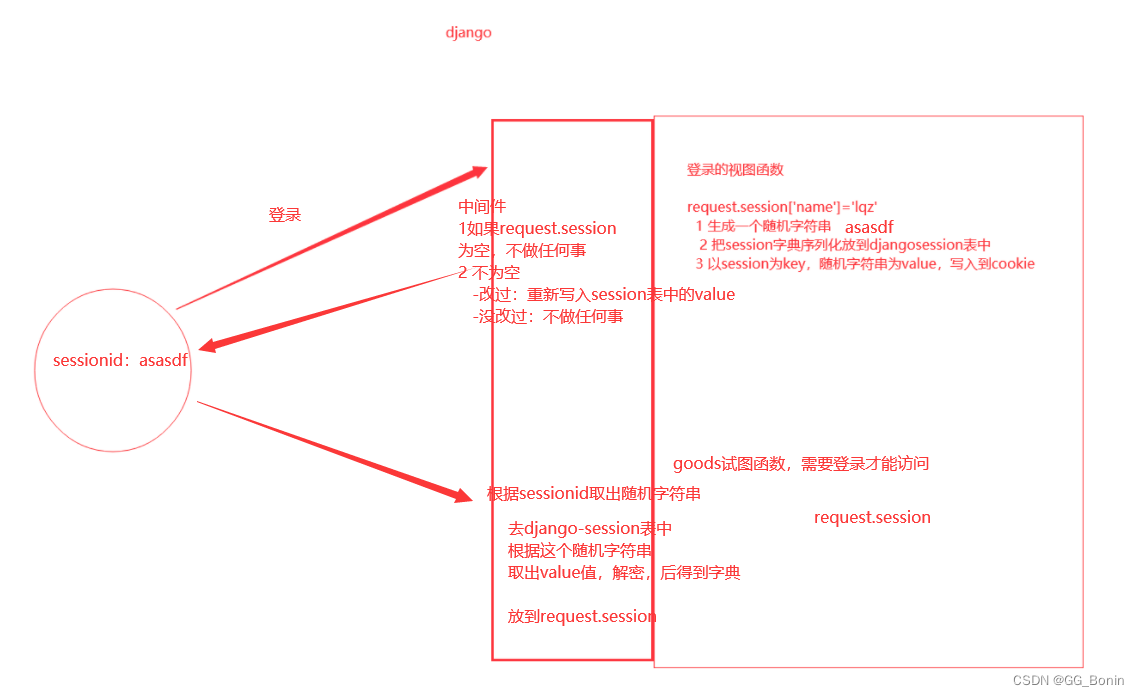
![[附源码]Python计算机毕业设计电子投票系统Django(程序+LW)](https://img-blog.csdnimg.cn/072078423d334d24bd823369ba020b84.png)