专栏有好几篇倒立摆相关的文章,大家可以自行参考阅读,包括编码器角度测量以及一些模型介绍,这篇博客我们记录、介绍S7-200 SMART PLC进行倒立摆控制采用串级PID的调试过程。
1、倒立摆的串级PID控制
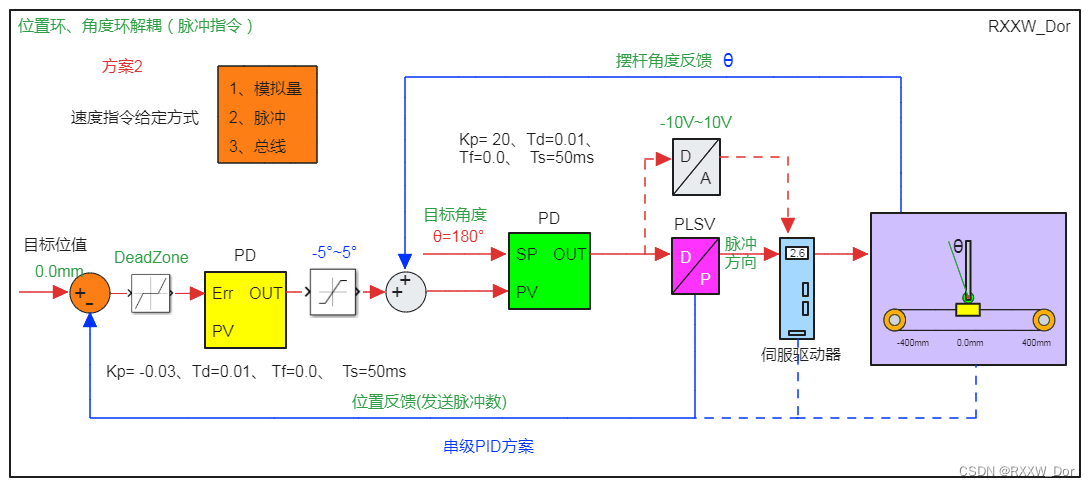
2、设置摆杆PID作用区域
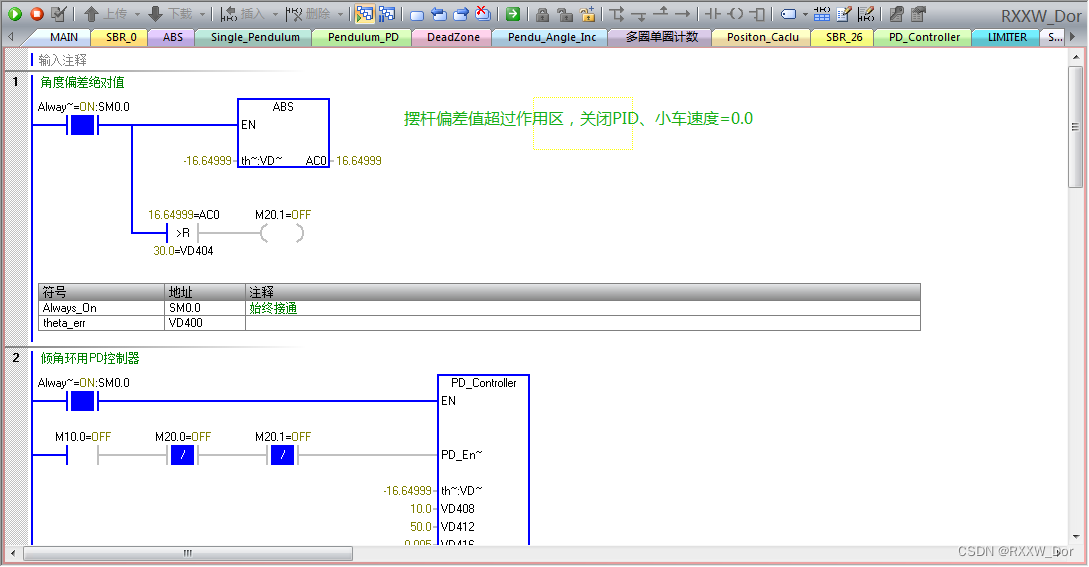
角度作用区域,在其它文章有详细图示,大家可以自行查看,链接如下:
倒立摆摆杆角度、角速度和角加速度(梯形图+SCL源代码)_RXXW_Dor的博客-CSDN博客通过编码器可以测量线速度、米数还可以测量物体转动角度等,计米轮应用可以参看下面文章:博途1200/1500PLC计米轮模块(SCL完整源代码)_RXXW_Dor的博客-CSDN博客计米轮测量线速度和米数的详细原理和算法解读,请参看下面的文章链接,这篇博客直接给出博途SCL的计米轮功能块完整源代码。SMART PLC计米轮模块PLC高速脉冲输入计米轮模块(编码器测速/计米详细讲解)_RXXW_Dor的博客-CSD