✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
智能优化算法 神经网络预测 雷达通信 无线传感器
信号处理 图像处理 路径规划 元胞自动机 无人机 电力系统
⛄ 内容介绍
传统的单隐层神经网络由三部分组成,分别是输入层、隐含层和输出层,输入层神经元节点个数即输入变量的个数,隐含层节点个数则需要人为给定,输出层节点个数也就是输出变量的个数。在2006年,新加坡南洋理工大学的Huang等[16]在传统的单隐层神经网络的基础上提出了一种新的前馈神经网络学习算法,命名为极限学习机(extremelearningmachine,ELM),不同于传统的基于梯度的前馈神经网络算法,该方法随机产生隐含层与输入层之间的连接权值及隐含层神经元的阈值,训练过程中只需要设置隐含神经元的个数便可获得唯一最优解,极限学习机网络结构如图1所示。

非洲秃鹫优化算法(AVOA)是AbdollahzadehB等[12]于2021年受非洲秃鹫觅食和导航行为启发而提出的一种新型元启发式优化算法,具有寻优能力强、收敛速度快等优点。AVOA是受非洲秃鹫觅食和导航行为启发提出的一种元启发式优化算法。AVOA数学描述如下。
a avoa通过通过所有适应度适应度适应度适应度炙鹤移动。
式中Ri(t) —除最优、次优蒸鹇外的其他蒸鹱位置; BestV1 、 BestV2 —最优蒸鹛和次优蒸鹛位置; L1 、 L2 —于0和1之间待测量为1 ; pi —选择最佳蒸鹇的概率; fi —其他蒸鹛合适度; t —当前代次数;其他参数含义相同。
b)秃鹫秃鹫觅食,若经常觅食状态状态状态状态状态状态状态状态状态状态能量能量能量能量能量能量能量能量能量能量能量能量能量能量能量能量能量更强壮的猎鹰附近察觉食物。食物率数据描述为:
式中F —秭兔饲料食用率; T —最大延迟次数; z — 1和1之间的随机数; h — 2和2之间的随机数; rand1 — 0和1之间的随机数; w —控制探索过程序参数,随着w值增加,计算进入研究阶段的概率增加大,反知概率减少。
c)探索阶段。炙鹤工具具有很高的视觉能力和很好的嗅觉能力。在AVOA中,炙鹤通式(5)随机搜索不同域。
式中Pi(t+1)—第t+1次迭代秃鹫位置;Pi(t)—第t次迭代秃鹫位置;X—秃鹫随机移动的地方,以保护食物免受其他秃鹫夺取,X=2×rand,rand表示0和1之间的随机数;P1—探索阶段选择参数;rand2、rand3、randP1—0和1之间的随机数;ub、lb—搜索空间上、下限值;其他参数意义同上。
d)开发阶段。AVOA中,开发阶段分为开发一阶段和开发二阶段2种策略,并通过开发阶段选择参数P2、P3决定采用何种策略进行位置更新。开发第一阶段秃鹫位置更新描述如下:
式中rand4、rand5、rand6、randP2—0和1之间的随机数;P2—开发第一阶段更新策略选择参数;其他参数意义同上。
开发第二阶段秃鹫位置更新描述如下:
式中BestV1(t)、BestV2(t)—第t次迭代最优、次优秃鹫位置;randP3—0和1之间的随机数;P3—开发第二阶段更新策略选择参数;Levy(d)—随即游走,其每一步方向完全随机而各向同性,步长为重尾分布;其他参数意义同上。
⛄ 部分代码
function [current_vulture_X] = exploration(current_vulture_X, random_vulture_X, F, p1, upper_bound, lower_bound)
if rand<p1
current_vulture_X=random_vulture_X-(abs((2*rand)*random_vulture_X-current_vulture_X))*F;
else
current_vulture_X=(random_vulture_X-(F)+rand()*((upper_bound-lower_bound)*rand+lower_bound));
end
end
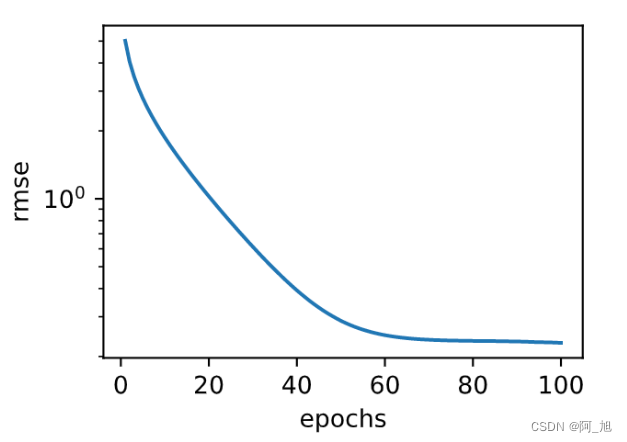
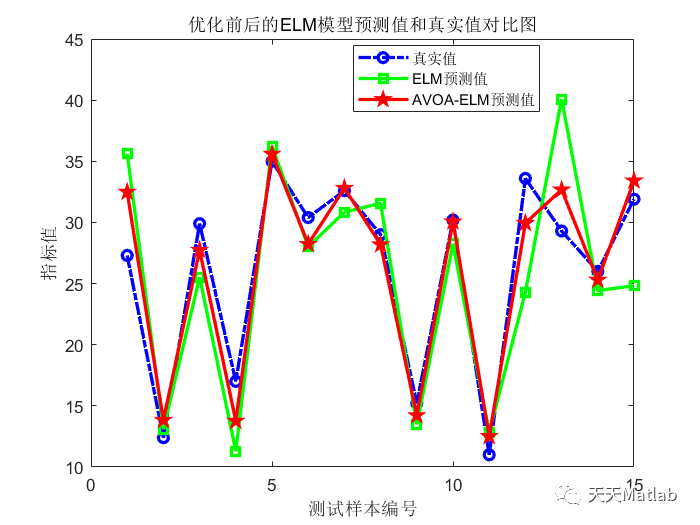
⛄ 运行结果


⛄ 参考文献
⛄ Matlab代码关注
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料