目录
异步通知简介
驱动中的信号处理
应用程序对异步通知的处理
驱动程序编写
编写测试APP
运行测试
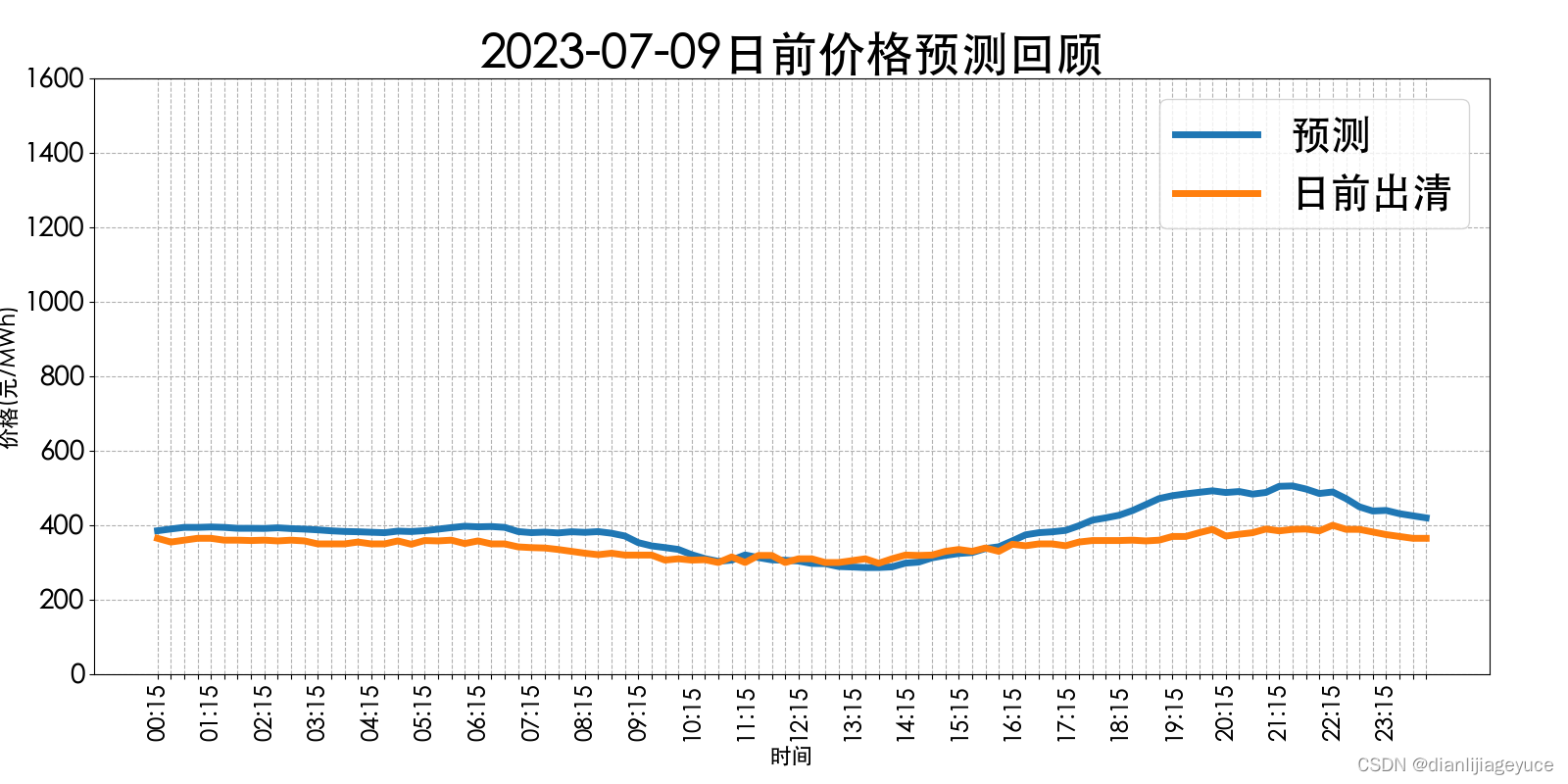
异步通知简介
在使用阻塞或者非阻塞的方式来读取驱动中按键值都是应用程序主动读取的,对于非阻塞方式来说还需要应用程序通过poll函数不断的轮询。最好的方式就是驱动程序能主动向应用程序发出通知,报告自己可以访问,然后应用程序在从驱动程序中读取或写入数据,类似于我们在裸机例程中讲解的中断。Linux提供了异步通知这个机制来完成此功能。
首先来回顾一下“中断”,中断是处理器提供的一种异步机制,配置好中断以后就可以让处理器去处理其他的事情了,当中断发生以后会触发事先设置好的中断服务函数,在中断服务函数中做具体的处理。比如在裸机篇里面编写的GPIO按键中断实验,通过按键去开关蜂鸣器,采用中断以后处理器就不需要时刻的去查看按键有没有被按下,因为按键按下以后会自动触发中断。同样的, Linux应用程序可以通过阻塞或者非阻塞这两种方式来访问驱动设备,通过阻塞方式访问的话应用程序会处于休眠态,等待驱动设备可以使用,非阻塞方式的话会通过poll函数来不断的轮询,查看驱动设备文件是否可以使用。这两种方式都需要应用程序主动的去查询设备的使用情况,如果能提供一种类似中断的机制,当驱动程序可以访问的时候主动告诉应用程序那就最好了。
“信号”为此应运而生,信号类似于硬件上使用的“中断”,只不过信号是软件层次上的。算是在软件层次上对中断的一种模拟,驱动可以通过主动向应用程序发送信号的方式来报告自己可以访问了,应用程序获取到信号以后就可以从驱动设备中读取或者写入数据了。整个过程就相当于应用程序收到了驱动发送过来了的一个中断,然后应用程序去响应这个中断,在整个处理过程中应用程序并没有去查询驱动设备是否可以访问,一切都是由驱动设备自己告诉给应用程序的。
阻塞、非阻塞、异步通知,这三种是针对不同的场合提出来的不同的解决方法,没有优劣之分,在实际的工作和学习中,根据自己的实际需求选择合适的处理方法即可。
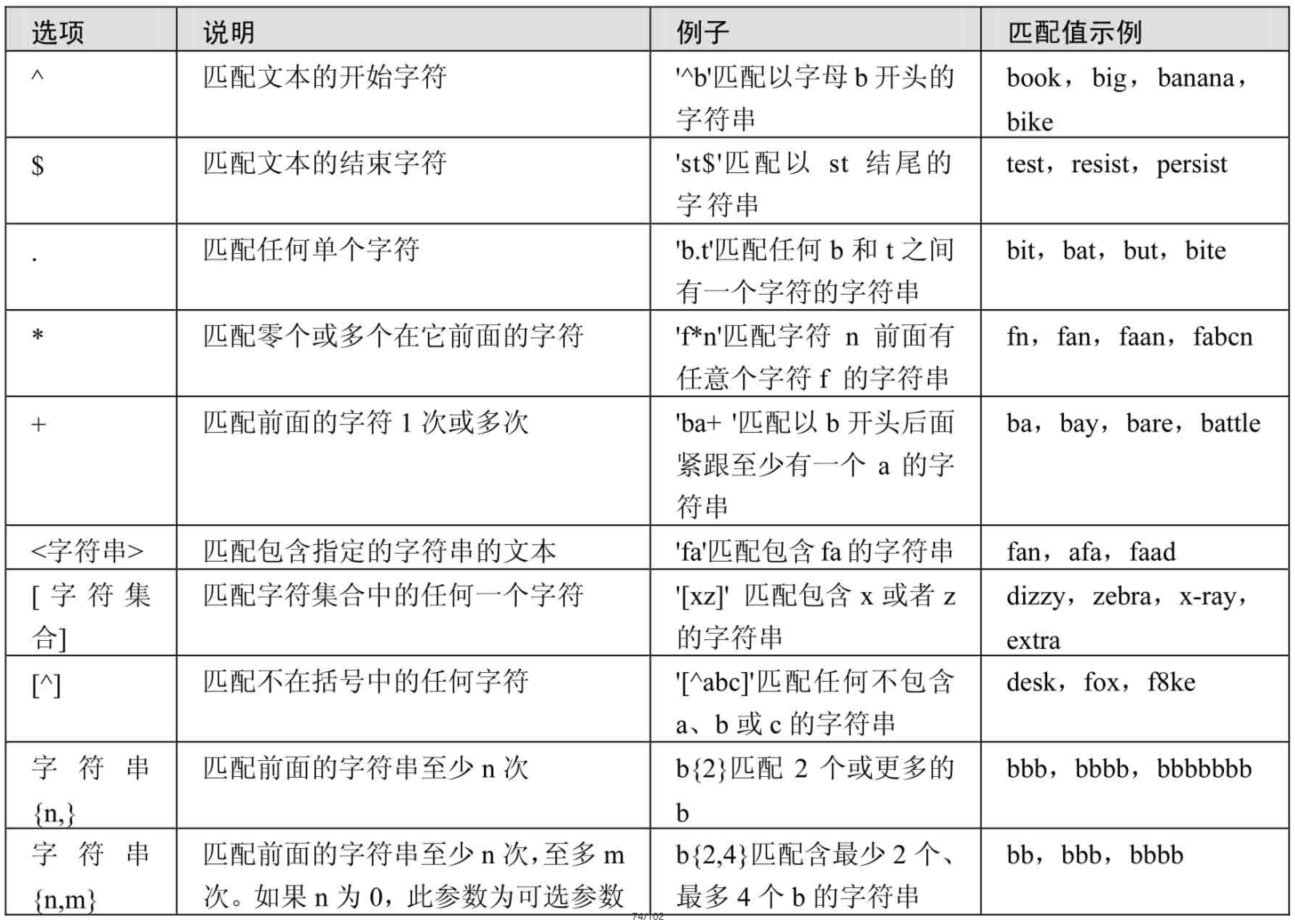
异步通知的核心就是信号,在arch/xtensa/include/uapi/asm/signal.h文件中定义了Linux所支持的所有信号,这些信号如下所示:
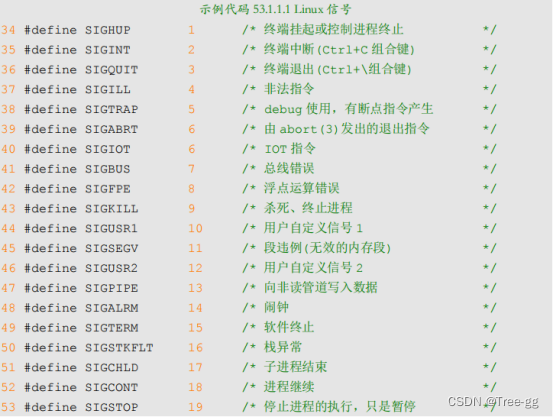
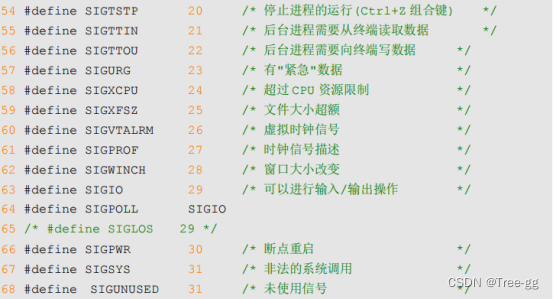
在示例代码中的这些信号中,除了SIGKILL(9)和SIGSTOP(19)这两个信号不能被忽略外,其他的信号都可以忽略。这些信号就相当于中断号,不同的中断号代表了不同的中断,不同的中断所做的处理不同,因此,驱动程序可以通过向应用程序发送不同的信号来实现不同的功能。
我们使用中断的时候需要设置中断处理函数,同样的,如果要在应用程序中使用信号,那么就必须设置信号所使用的信号处理函数,在应用程序中使用signal函数来设置指定信号的处理函数,signal 函数原型如下所示:
![]()
signum:要设置处理函数的信号。
handler:信号的处理函数。
返回值:设置成功的话返回信号的前一个处理函数,设置失败的话返回SIG-ERR。
信号处理函数原型如下所示:
![]()
使用“kill -9 PID”杀死指定进程的方法就是向指定的进程(PID)发送SIGKILL这个信号。当按下键盘上的CTRL+C组合键以后会向当前正在占用终端的应用程序发出SIGINT信号, SIGINT信号默认的动作是关闭当前应用程序。这里我们修改一下SIGINT信号的默认处理函数,当按下CTRL+C组合键以后先在终端上打印出"SIGINT signal!"这行字符串,然后再关闭当前应用程序。新建signaltest.c文件,然后输入如下所示内容:
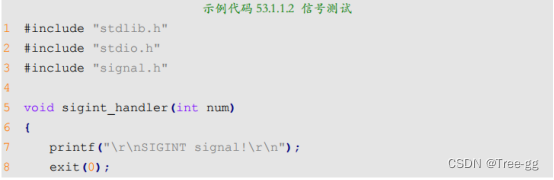
在示例代码中设置SIGINT信号的处理函数为sigint_handler,当按下CTRL+C向signaltest发送SIGINT信号以后sigint_handler函数就会执行,此函数先输出一行"SIGINT signal!”字符串,然后调用exit函数关闭signaltest应用程序。
使用如下命令编译signaltest.c:
![]()
然后输入"./signaltest"命令打开signaltest这个应用程序,然后按下键盘上的CTRL+C组合键,结果如图所示:

从图可以看出,当按下CTRL+C组合键以后sigint_handler这个SIGINT信号处理函数执行了,并且输出了"SIGINT signal!”这行字符串。
驱动中的信号处理
fasync_struct结构体
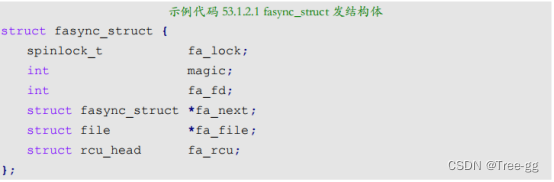
首先我们需要在驱动程序中定义一个fasyne_struct结构体指针变量, fasyne_struct结构体内容如下:
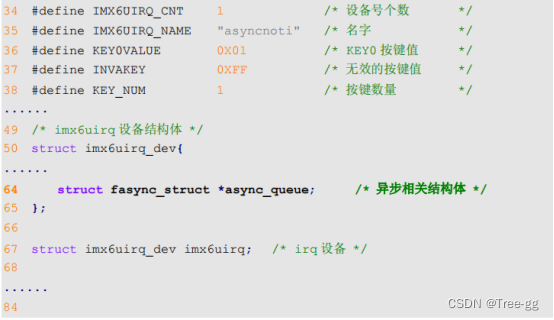
一般将fasync_struct结构体指针变量定义到设备结构体中,比如在imx6uirq_dev结构体中添加一个fasyne_struct结构体指针变量,结果如下所示:


第14行就是在imx6uirq_dev中添加了一个fasync_struct结构体指针变量。
fasync函数
如果要使用异步通知,需要在设备驱动中实现file_operations操作集中的fasync函数,此函数格式如下所示:
![]()
fasyne函数里面一般通过调用fasyne_helper函数来初始化前面定义的fasyne_struct结构体指针,fasync_helper函数原型如下:
![]()
fasync_helper函数的前三个参数就是fasync函数的那三个参数,第四个参数就是要初始化的fasync_struct结构体指针变量。当应用程序通过"fentl(fd, F_SETFL, flags | FASYNC)"改变fasync标记的时候,驱动程序file_operations操作集中的fasync函数就会执行。
驱动程序中的fasyne函数参考示例如下:
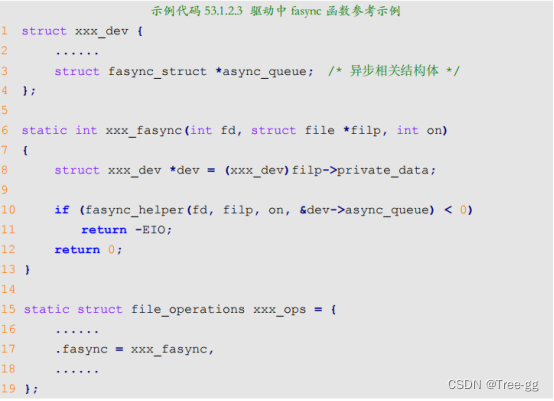
在关闭驱动文件的时候需要在file_operations操作集中的release函数中释放fasync_struct,fasync-struct的释放函数同样为fasync_helper, release函数参数参考实例如下:


第3行通过调用示例代码53.1.2.3中的xxx_fasync函数来完成fasyne_struct的释放工作,但是,其最终还是通过fasync_helper函数完成释放工作。
kill_fasync函数
当设备可以访问的时候,驱动程序需要向应用程序发出信号,相当于产生“中断”。kill-fasync函数负责发送指定的信号, kill_fasync函数原型如下所示:
![]()
fp:要操作的fasync_struct。
sig:要发送的信号。
band:可读时设置为POLL_IN,可写时设置为POLL_OUT。
返回值:无。
应用程序对异步通知的处理
1.注册信号处理函数
应用程序根据驱动程序所使用的信号来设置信号的处理函数,应用程序使用signal函数来设置信号的处理函数。
2.将本应用程序的进程号告诉给内核
使用fentl(fd, F_SETOWN, getpid())将本应用程序的进程号告诉给内核。
3.开启异步通知
使用如下两行程序开启异步通知:
![]()
重点就是通过fentl函数设置进程状态为FASYNC,经过这一步,驱动程序中的fasyne函数就会执行。
驱动程序编写

第20行,添加 fentl.h 头文件,因为要用到相关的API 函数。
第64行,在设备结构体imx6uirq_dev中添加fasync_struct指针变量。
第109-112行,如果是一次完整的按键过程,那么就通过kill_fasync函数发送SIGIO信号。第114~120行,屏蔽掉以前的唤醒进程相关程序。
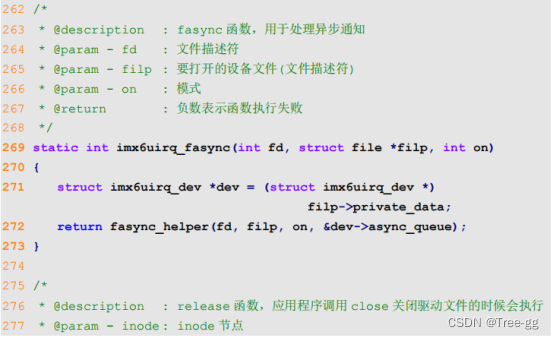
第269-273行, imx6uirq_fasync函数,为file_operations操作集中的fasync函数,此函数内容很简单,就是调用一下fasync_helper。
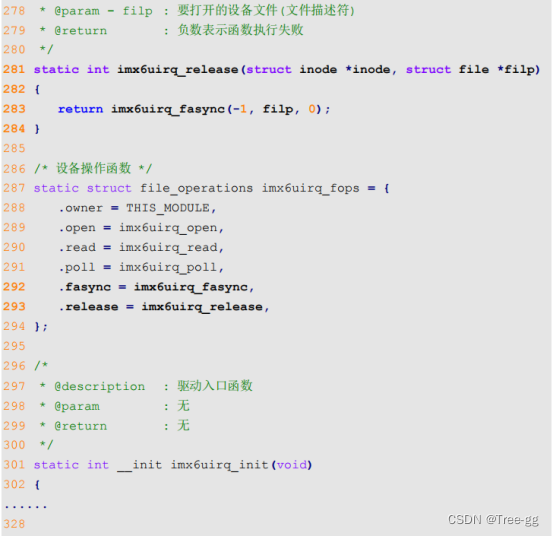
第281-284行, release函数,应用程序调用close函数关闭驱动设备文件的时候此函数就会执行,在此函数中释放掉 fasync_struct 指针变量。
第292-293行,设置file_operations操作集中的fasync和release这两个成员变量。
编写测试APP
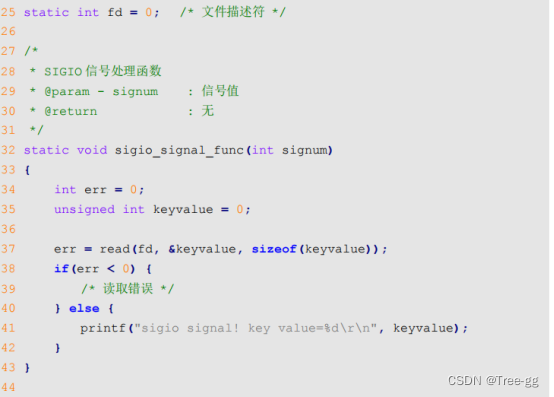
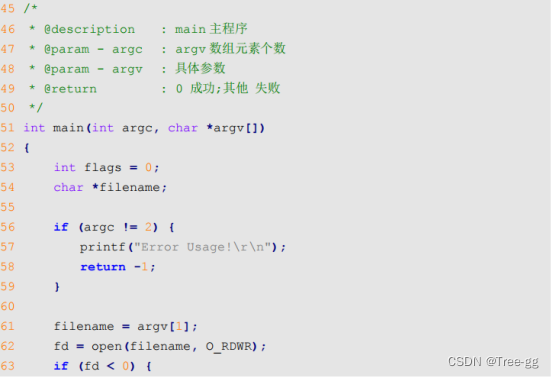
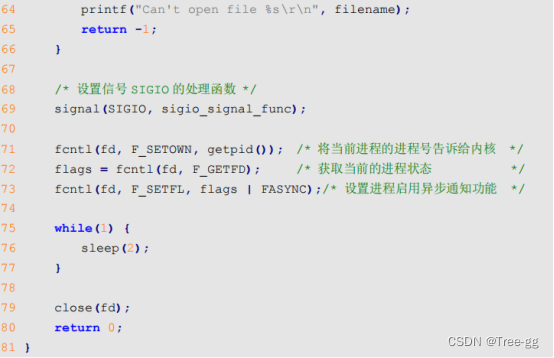
第32~43行,sigio_signal_func 函数,SIGIO信号的处理函数,当驱动程序有效按键按下以后就会发送SIGIO信号,此函数就会执行。此函数通过read函数读取按键值,然后通过printf 函数打印在终端上。
第69行,通过signal函数设置SIGIO信号的处理函数为sigio_signal_func。
第71~73行,设置当前进程的状态,开启异步通知的功能。
第75~77行,while循环,等待信号产生。
运行测试
![]()
![]()
按下开发板上的KEY0键,终端就会输出按键值,如图所示:

从图可以看出,捕获到SIGIO信号,并且按键值获取成功,大家可以自行以后台模式运行asynenotiApp,查看一下这个应用程序的CPU使用率。如果要卸载驱动的话输入如下命令即可:
![]()