数据集:【文末】

数据集预处理
定义读取数据辅助类(继承torch.utils.data.Dataset)
import osimport PILimport torchimport torchvisionimport matplotlib.pyplot as pltimport torch.utils.dataimport PIL.Image # 数据集路径train_path = './train'test_path = './test'device = torch.device("cuda" if torch.cuda.is_available() else "cpu")class MyDataset(torch.utils.data.Dataset):def __init__(self, data_path: str, train=True, transform=None):self.data_path = data_pathself.train_flag = trainif transform is None:self.transform = torchvision.transforms.Compose([torchvision.transforms.Resize(size=(224, 224)), # 尺寸规范torchvision.transforms.ToTensor(), # 转化为tensortorchvision.transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)), # 归一化])else:self.transform = transformself.path_list = os.listdir(data_path) # 列出所有图片命名def __getitem__(self, idx: int):img_path = self.path_list[idx]if self.train_flag is True:# 例如 img_path 值 cat.10844.jpg -> label = 0if img_path.split('.')[0] == 'dog':label = 1else:label = 0else:label = int(img_path.split('.')[0]) # 获取test数据的编号label = torch.tensor(label, dtype=torch.int64) # 把标签转换成int64img_path = os.path.join(self.data_path, img_path) # 合成图片路径img = PIL.Image.open(img_path) # 读取图片img = self.transform(img) # 把图片转换成tensorreturn img, labeldef __len__(self) -> int:return len(self.path_list) # 返回图片数量train_datas = MyDataset(train_path)test_datas = MyDataset(test_path, train=False)
(原本数据有25000张,由于设备的原因,训练完之后我删掉了很多图片,训练集+测试集只有2000张)
查看读取的数据
# 展示读取的图片数据,因为做了归一化,所有图片显示不正常。Img_PIL_Tensor = train_datas[20][0]new_img_PIL = torchvision.transforms.ToPILImage()(Img_PIL_Tensor).convert('RGB')plt.imshow(new_img_PIL)plt.show(block=True)
训练集和测试集分组,数据分batch
(根据自己的设备来,好的就设32,不好就4吧)
# 70%训练集 30%测试集train_size = int(0.7 * len(train_datas))validate_size = len(train_datas) - train_sizetrain_datas,validate_datas = torch.utils.data.random_split(train_datas,[train_size, validate_size])# 数据分批# batch_size=32 每一个batch大小为32# shuffle=True 打乱分组# pin_memory=True 锁页内存,数据不会因内存不足,交换到虚拟内存中,能加快数据读入到GPU显存中.# num_workers 线程数。num_worker设置越大,加载batch就会很快,训练迭代结束可能下一轮batch已经加载好# win10 设置会多线程可能会出现问题,一般设置0.train_loader = torch.utils.data.DataLoader(train_datas, batch_size=4,shuffle=True, pin_memory=True, num_workers=0)validate_loader = torch.utils.data.DataLoader(validate_datas, batch_size=4,shuffle=True, pin_memory=True, num_workers=0)test_loader = torch.utils.data.DataLoader(test_datas, batch_size=4,shuffle=False, pin_memory=True, num_workers=0)
VGG网络:
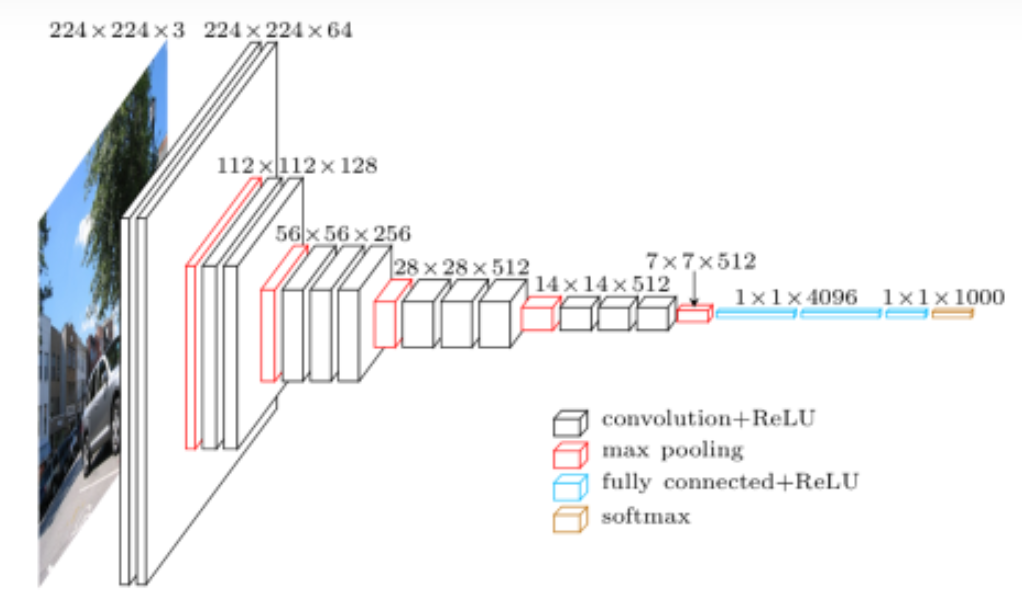
def vgg_block(num_convs, in_channels, out_channels):layers = []for _ in range(num_convs):layers.append(torch.nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1))layers.append(torch.nn.ReLU())in_channels = out_channels# ceil_mode=False 输入的形状不是kernel_size的倍数,直接不要。# ceil_mode=True 输入的形状不是kernel_size的倍数,单独计算。layers.append(torch.nn.MaxPool2d(kernel_size=2, stride=2, ceil_mode=False))return torch.nn.Sequential(*layers)def vgg(conv_arch):conv_blks = []# 数据输入是几个通道in_channels = 3# 卷积层部分for (num_convs, out_channels) in conv_arch:conv_blks.append(vgg_block(num_convs, in_channels, out_channels))in_channels = out_channelsreturn torch.nn.Sequential(*conv_blks, torch.nn.Flatten(),torch.nn.Linear(out_channels * 7 * 7, 4096), torch.nn.ReLU(), torch.nn.Dropout(0.5),torch.nn.Linear(4096, 4096), torch.nn.ReLU(), torch.nn.Dropout(0.5),torch.nn.Linear(4096, 2))
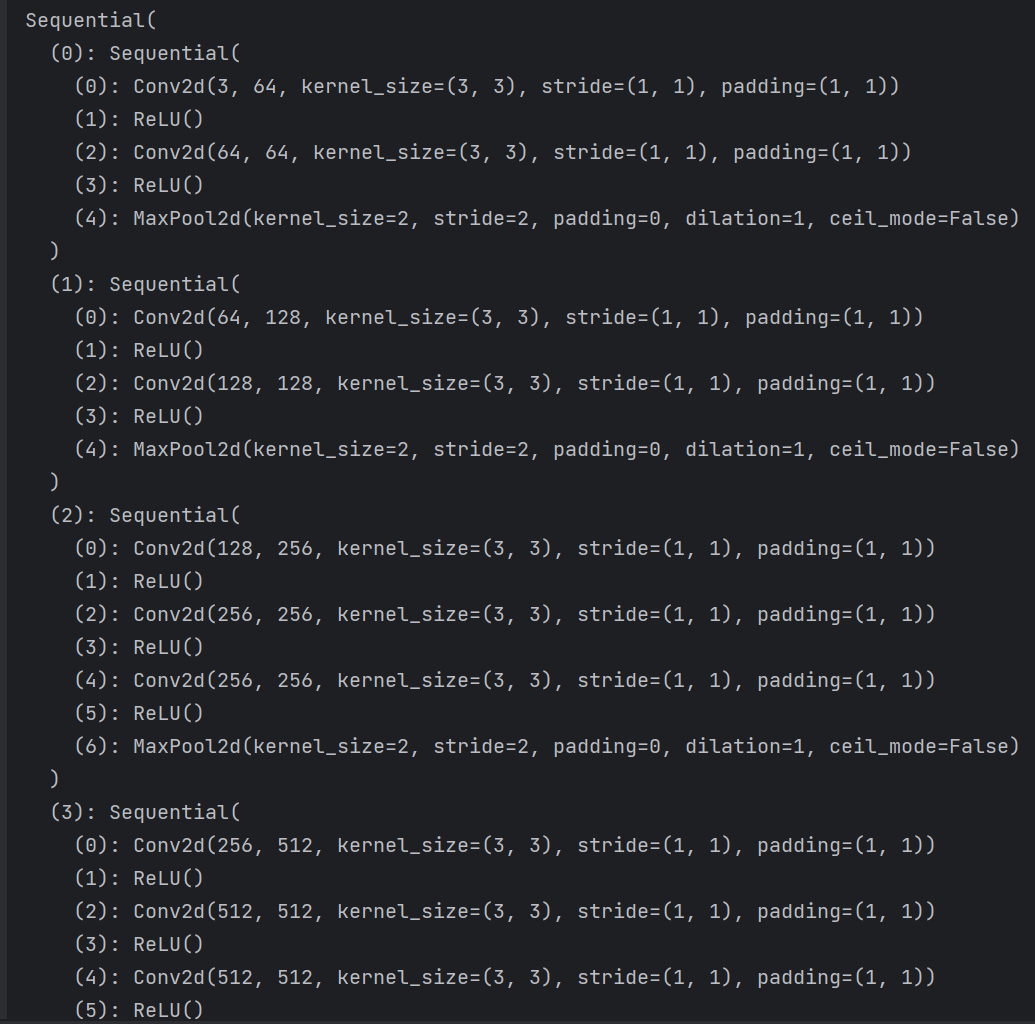
VGG神经网络定义和参数初始化
# VGG11,VGG13,VGG16,VGG19 可自行更换。conv_arch = ((2, 64), (2, 128), (3, 256), (3, 512), (3, 512)) # vgg16#conv_arch = ((1, 64), (1, 128), (2, 256), (2, 512), (2, 512)) # vgg11#conv_arch = ((2, 64), (2, 128), (2 , 256), (2, 512), (2, 512)) # vgg13#conv_arch = ((2, 64), (2, 128), (4, 256), (4, 512), (4, 512)) # vgg19net = vgg(conv_arch) # 定义网络net = net.to(device) # 把网络加载到GPU上# Xavier方法 初始化网络参数,最开始没有初始化一直训练不起来。def init_normal(m):if type(m) == torch.nn.Linear:# Xavier初始化torch.nn.init.xavier_uniform_(m.weight)torch.nn.init.zeros_(m.bias)if type(m) == torch.nn.Conv2d:# Xavier初始化torch.nn.init.xavier_uniform_(m.weight)torch.nn.init.zeros_(m.bias)net.apply(init_normal)learn_rate = 1e-5#momentum = 0.9#optimizer = torch.optim.SGD(net.parameters(), learn_rate, momentum = momentum) #定义梯度优化算法optimizer = torch.optim.Adam(net.parameters(), learn_rate) #开始使用SGD没有训练起来,才更换的Adamcost = torch.nn.CrossEntropyLoss(reduction='sum') # 定义损失函数,返回batch的loss和。print(net) # 打印模型架构

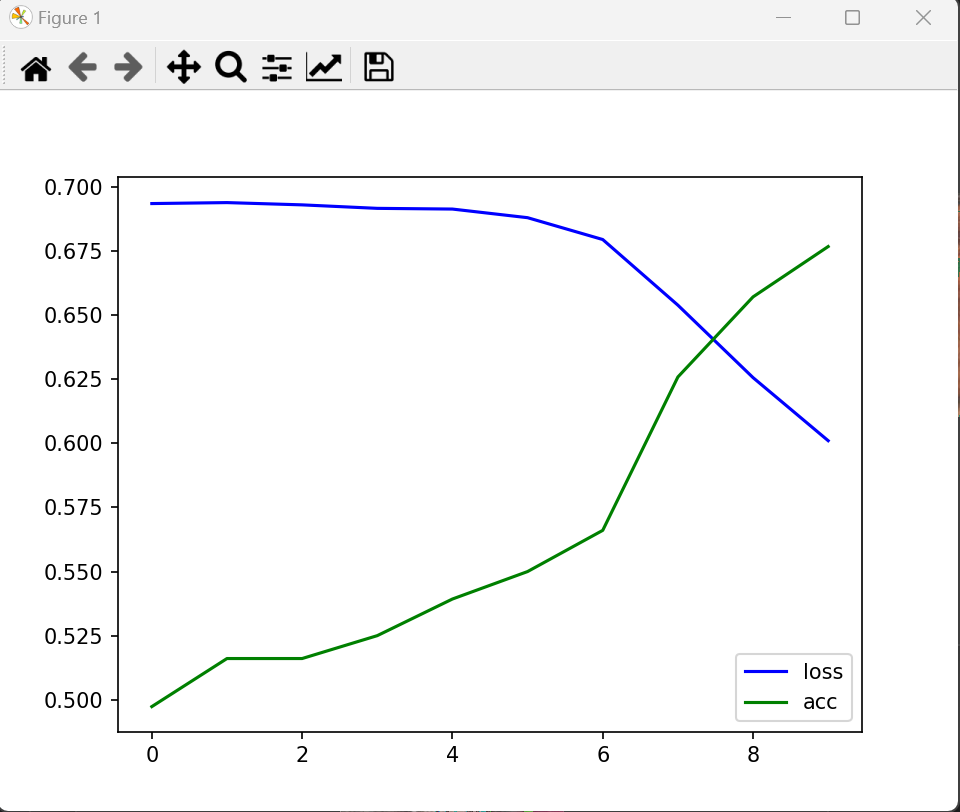
训练VGG神经网络
epoch = 10 # 迭代10次def train_model(net, train_loader, validate_loader, cost, optimezer):net.train() # 训练模式now_loss = 1e9 # flag 计算当前最优losstrain_ls = [] # 记录在训练集上每个epoch的loss的变化情况train_acc = [] # 记录在训练集上每个epoch的准确率的变化情况for i in range(epoch):loss_epoch = 0. # 保存当前epoch的loss和correct_epoch = 0 # 保存当前epoch的正确个数和for j, (data, label) in enumerate(train_loader):data, label = data.to(device), label.to(device)pre = net(data)# 计算当前batch预测正确个数correct_epoch += torch.sum(pre.argmax(dim=1).view(-1) == label.view(-1)).item()loss = cost(pre, label)loss_epoch += loss.item()optimezer.zero_grad()loss.backward()optimezer.step()if j % 100 == 0:print(f'batch_loss:{loss.item()}, batch_acc:{torch.sum(pre.argmax(dim=1).view(-1) == label.view(-1)).item() / len(label)}%')train_ls.append(loss_epoch / train_size)train_acc.append(correct_epoch / train_size)# 每一个epoch结束后,在验证集上验证实验结果。with torch.no_grad():loss_validate = 0.correct_validate = 0for j, (data, label) in enumerate(validate_loader):data, label = data.to(device), label.to(device)pre = net(data)correct_validate += torch.sum(pre.argmax(dim=1).view(-1) == label.view(-1)).item()loss = cost(pre, label)loss_validate += loss.item()# print(f'validate_sum:{loss_validate}, validate_Acc:{correct_validate}')print(f'validate_Loss:{loss_validate / validate_size}, validate_Acc:{correct_validate / validate_size}%')# 保存当前最优模型参数if now_loss > loss_validate:now_loss = loss_validateprint("保存模型参数。。。。。。。。。。。")torch.save(net.state_dict(), 'model.params')# 画图plt.plot(range(epoch), train_ls, color='b', label='loss')plt.plot(range(epoch), train_acc, color='g', label='acc')plt.legend()plt.show(block=True) # 显示 labletrain_model(net, train_loader, validate_loader, cost, optimizer)

资料分享栏目
数据集之猫狗系列(VGG16)
链接:https://pan.baidu.com/s/1MoJPs-BQ6GP1PrXjo-wKsQ
提取码:dgna