文章目录
前言
1 概述
2 调优值
3 用任务规划器设置
前言
你可以在飞行中使用你的遥控发射器进行广泛的参数调优。这是为那些无法使用自动调优功能的高级用户准备的,或者希望通过对每个参数的完全手动调优控制来进行微调。
1 概述
基于发射机的调优允许你在飞行中调优单个参数或一组参数。其基本思想是将一个参数的调优值与发射机上的旋钮或滑块联系起来,然后在飞行中通过移动旋钮来调整该参数。
通过基于发射机的调优,你可以在飞行中使用发射机的通道6 调优单个或多个参数。
TUNE 参数决定了哪个参数被调优。
TUNE_MAX 参数决定了通道处于 RC6_MAX 时的参数最大值,而 TUNE_MIN 参数决定了 RC 通道 6 处于 RC6_MIN 时的数值。
2 调优值
| Value | Meaning | Parameter |
| 0 | None | |
| 1 | Stab Roll/Pitch kP | ATC_ANG_RLL_P, ATC_ANG_PIT_P |
| 4 | Rate Roll/Pitch kP | ATC_RAT_RLL_P, ATC_RAT_PIT_P |
| 5 | Rate Roll/Pitch kI | ATC_RAT_RLL_I, ATC_RAT_PIT_I |
| 21 | Rate Roll/Pitch kD | ATC_RAT_RLL_D, ATC_RAT_PIT_D |
| 3 | Stab Yaw kP | ATC_ANG_YAW_P |
| 6 | Rate Yaw kP | ATC_RAT_YAW_P |
| 26 | Rate Yaw kD | ATC_RAT_YAW_D |
| 56 | Rate Yaw Filter | ATC_RAT_YAW_FLTE |
| 55 | Motor Yaw Headroom | MOT_YAW_HEADROOM |
| 14 | AltHold kP | PSC_POSZ_P |
| 7 | Throttle Rate kP | PSC_VELZ_P |
| 34 | Throttle Accel kP | PSC_ACCZ_P |
| 35 | Throttle Accel kI | PSC_ACCZ_I |
| 36 | Throttle Accel kD | PSC_ACCZ_D |
| 12 | Loiter Pos kP | PSC_POSXY_P |
| 22 | Velocity XY kP | PSC_VELXY_P |
| 28 | Velocity XY kI | PSC_VELXY_I |
| 10 | WP Speed | WPNAV_SPEED |
| 25 | Acro RollPitch kP | ACRO_RP_RATE |
| 40 | Acro Yaw kP | ACRO_Y_RATE |
| 45 | RC Feel | ATC_INPUT_TC |
| 13 | Heli Ext Gyro | H_GYR_GAIN |
| 38 | Declination | COMPASS_DEC |
| 39 | Circle Rate | CIRCLE_RATE |
| 46 | Rate Pitch kP | ATC_RAT_PIT_P |
| 47 | Rate Pitch kI | ATC_RAT_PIT_I |
| 48 | Rate Pitch kD | ATC_RAT_PIT_D |
| 49 | Rate Roll kP | ATC_RAT_RLL_P |
| 50 | Rate Roll kI | ATC_RAT_RLL_I |
| 51 | Rate Roll kD | ATC_RAT_RLL_D |
| 52 | Rate Pitch FF | ATC_RAT_PIT_FF ** |
| 53 | Rate Roll FF | ATC_RAT_RLL_FF ** |
| 54 | Rate Yaw FF | ATC_RAT_YAW_FF ** |
| 57 | Winch | WINCH_RATE_MAX |
| 58 | SysID Magnitude | SIDS_MAGNITUDE |
** 仅限传统直升飞机。
这些值既可以手动设置,也可以使用任务规划器设置。
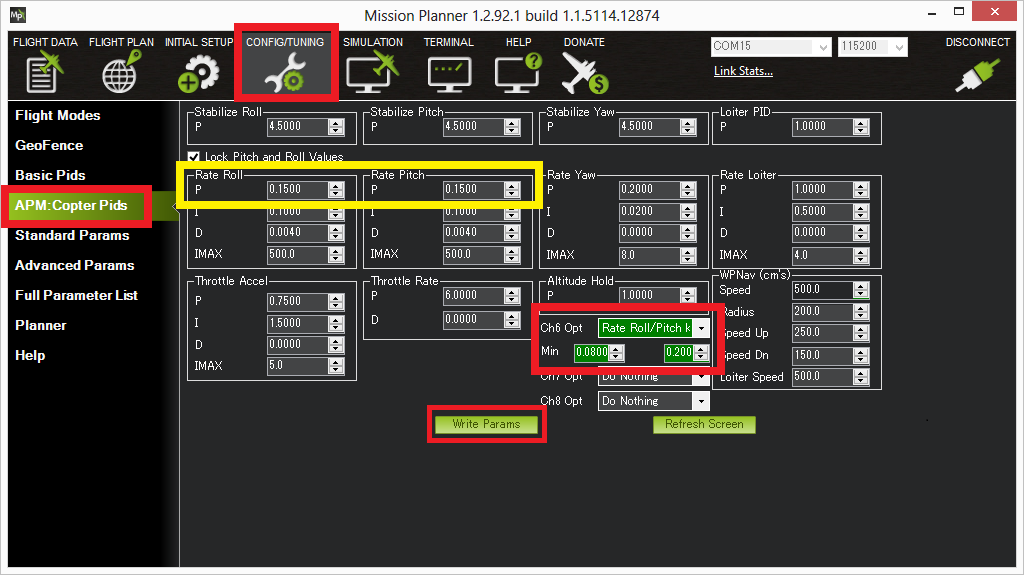
3 用任务规划器设置
横滚速率P 和俯仰速率P 将在以下的例子程序中使用。
1. 将你的自动驾驶仪连接到任务规划器。
2. 在任务规划器上,选择 CONFIG>>Extended Tuning。
3. 将 TUNE 下拉框选项设为"Rate Roll/Pitch kP"。
4. 设置最小值为 0.08,最大值为 0.20(大多数旋翼飞机的理想增益都在这个范围内,尽管从少数旋翼飞机来看,最大值可以高达 0.25)。
5. 按下"写参数"按钮。
6. 把发射机的 CH6 调优旋钮转到最小位置,按"刷新参数"按钮,确保 Rate Roll P 和 Rate Pitch P 值变成 0.08(或非常接近)。
7. 将 CH6 旋钮转到最大位置,按"刷新参数",并确保 Rate Roll P 移动到 0.20。
8. 将 CH6 旋钮移回中间位置。
9. 在稳定模式下解锁和飞行旋翼飞机,调整 CH6 旋钮,直到你得到一个反应灵敏但不摇晃的飞行器。
10. 飞行结束后,断开锂聚合物电池的连接,并将自动驾驶仪重新连接到任务计划器上。
11. 当 CH6 旋钮处于最佳性能的位置时,返回到 Copter Pids 屏幕,按下"Refresh Params"按钮。
12. 在"Rate Roll P"和"Rate Pitch P"字段中,重新输入你看到的数值,但只是稍作修改,以便任务规划器识别它的变化,并重新发送给自动驾驶仪(注意:如果你重新输入与 Rate Roll P 中出现的数字完全相同,则不会被更新)。因此,例如,如果"Rate Roll P"显示为"0.1213",则将其改为"0.1200"。
13. 将 CH6 选项设置为"无",然后按"写参数"。
14. 按下右上角的断开按钮,然后按下连接按钮。
15. 确保 Rate Roll P 值是你在步骤 #12 中重新输入的值。
!Note
当你移动调优旋钮时,数值以每秒 3 次的速度更新。在上述步骤 #6 和 #7 中需要按下任务规划器中的刷新按钮,只是因为 Copter 没有实时向任务规划器发送更新。