文章目录
- 前言
- 1 使用STM32CubeMX初始化代码
- 1.1 时钟配置
- 1.2 设置定时器
- 1.3 触发引脚
- 1.4 串口配置
- 2 代码编写
- 2.1 添加驱动文件
- 2.2 修改main.c
- 3 实现效果
- 参考
前言
硬件选择
- stm32f103c8t6(最小板)
- hc-sr04超声波模块
软件环境
- stm32cubeIDE 1.12.1
hc-sr04模块超声波测距的原理,在上一篇博客已经提到,这里不在解释说明,详见:https://blog.csdn.net/apple_52030329/article/details/131021811
1 使用STM32CubeMX初始化代码
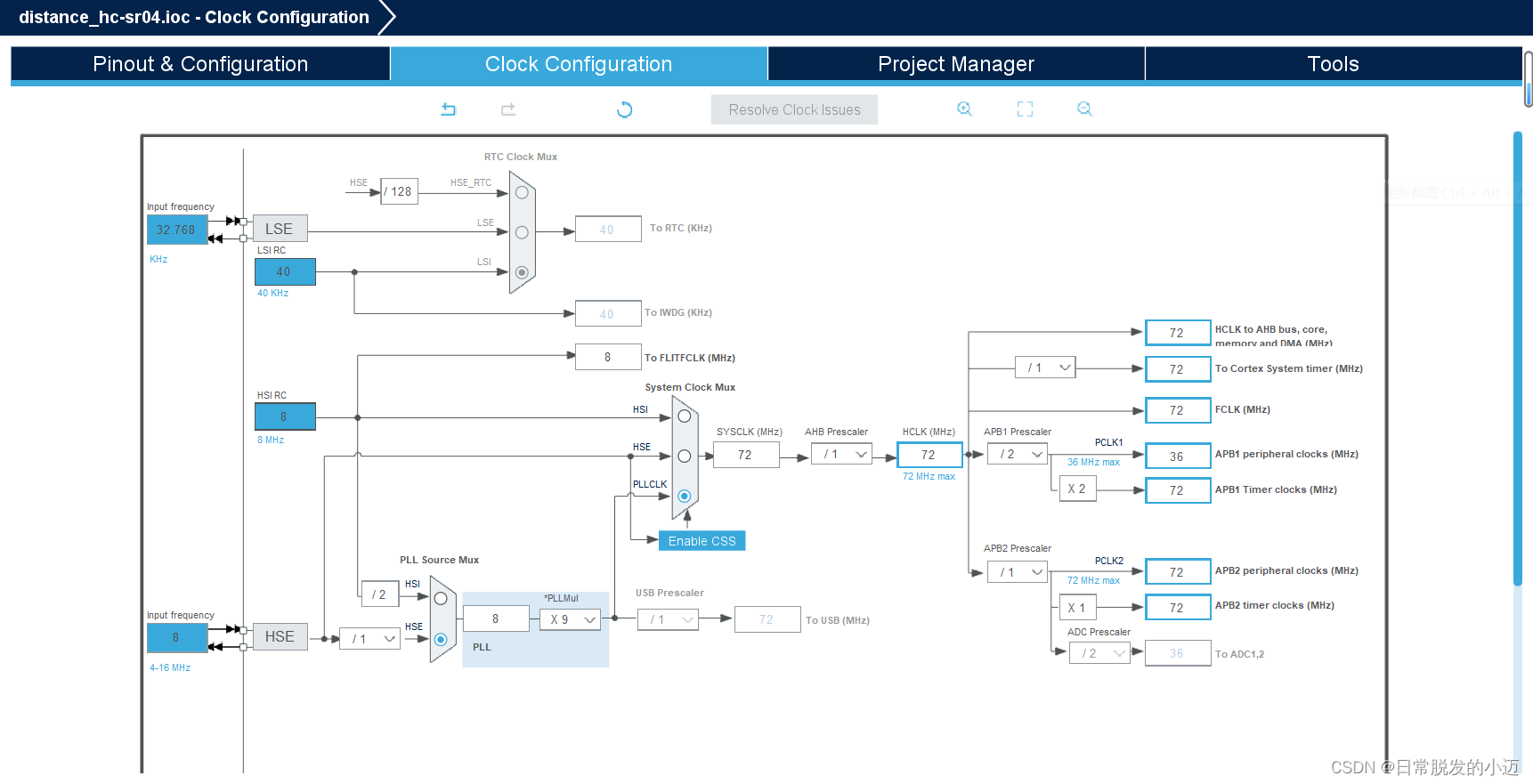
1.1 时钟配置
时钟配置如下图,我用了8MHz的HSE,HCLK调到了最大值72MHz
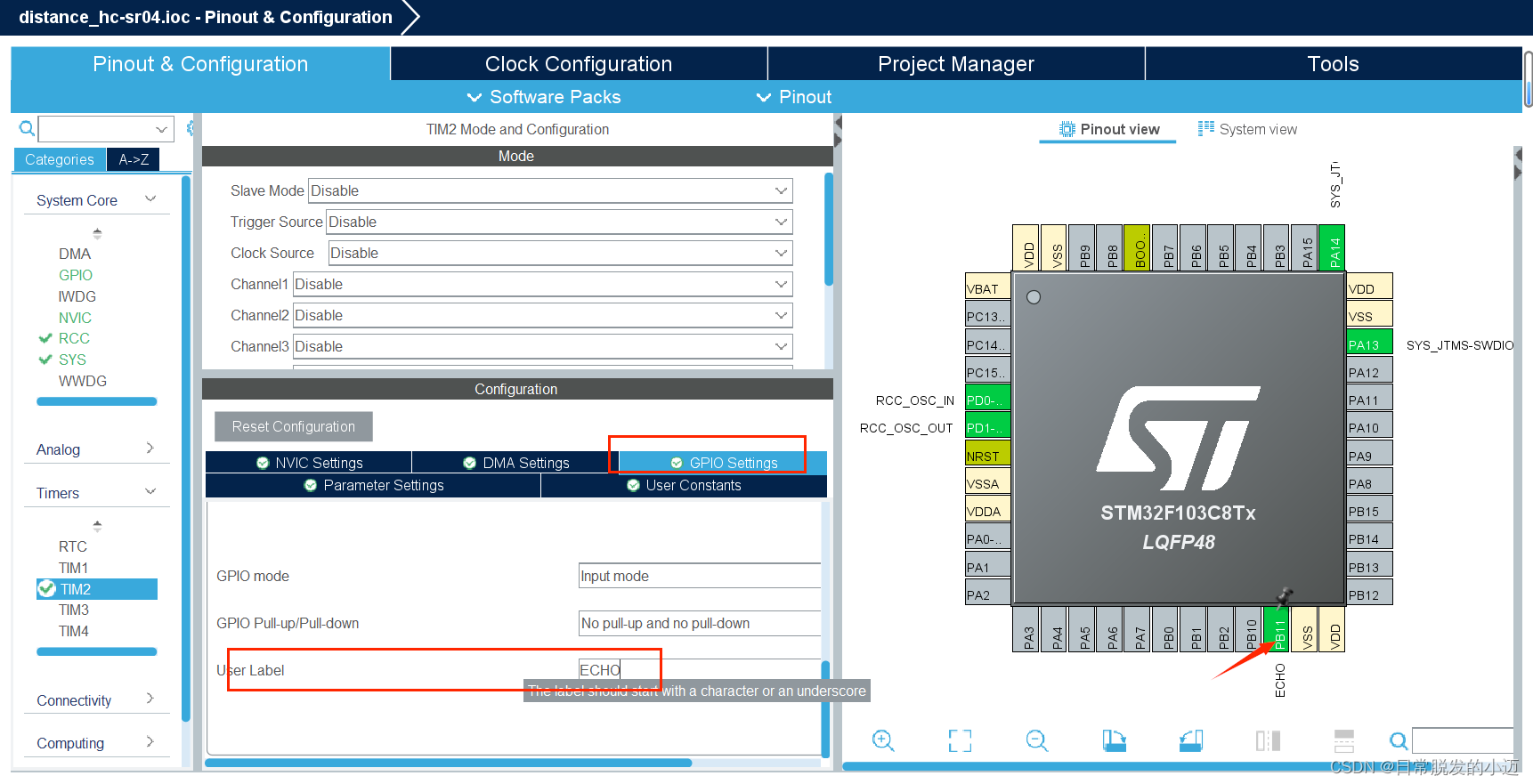
1.2 设置定时器
设置定时器TIM2每1us向上计数一次,通道4为上升沿捕获并连接到超声波模块的ECHO引脚,记得开启定时器中断(涉及到捕获中断+定时器溢出中断)。
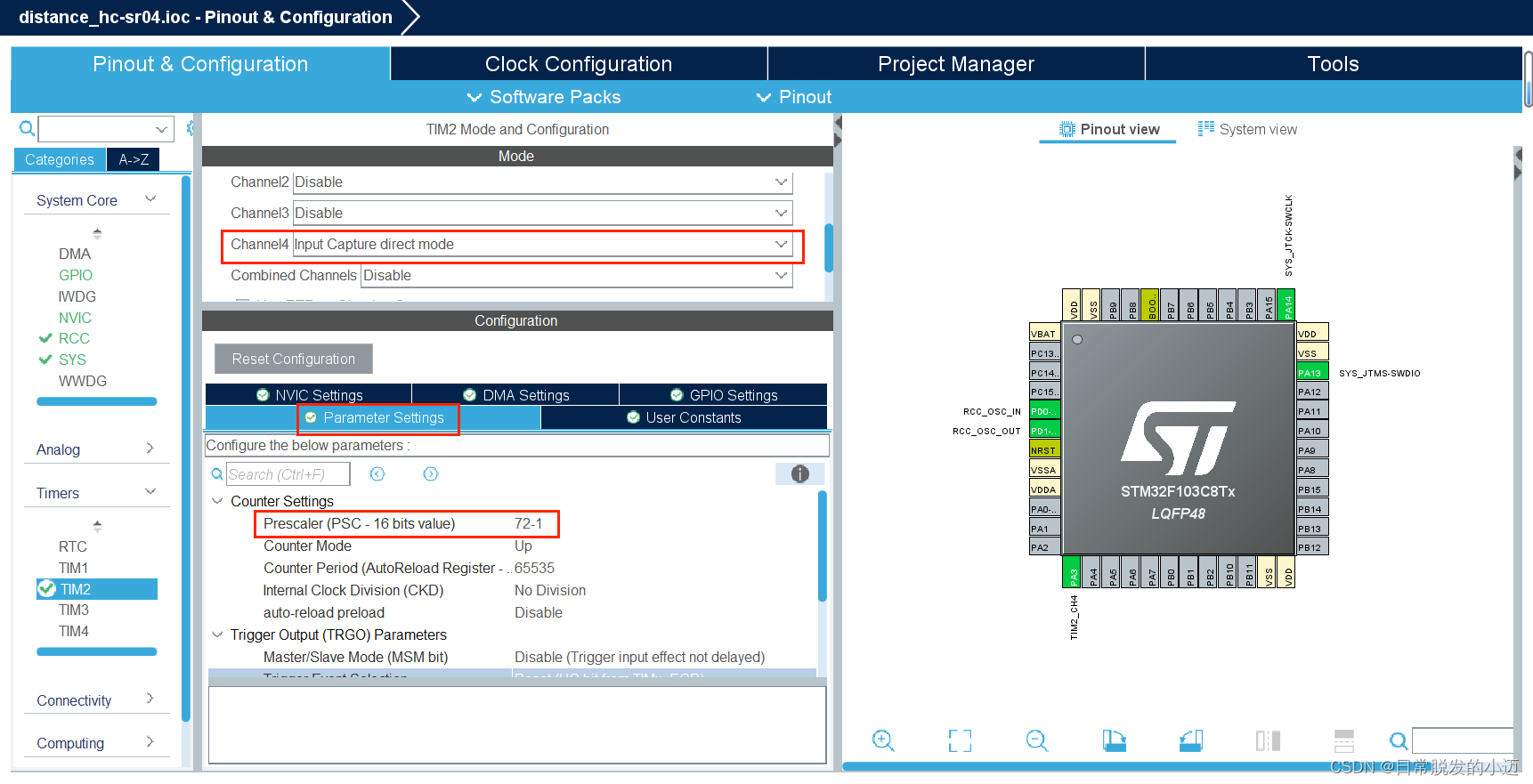
连接ECHO引脚
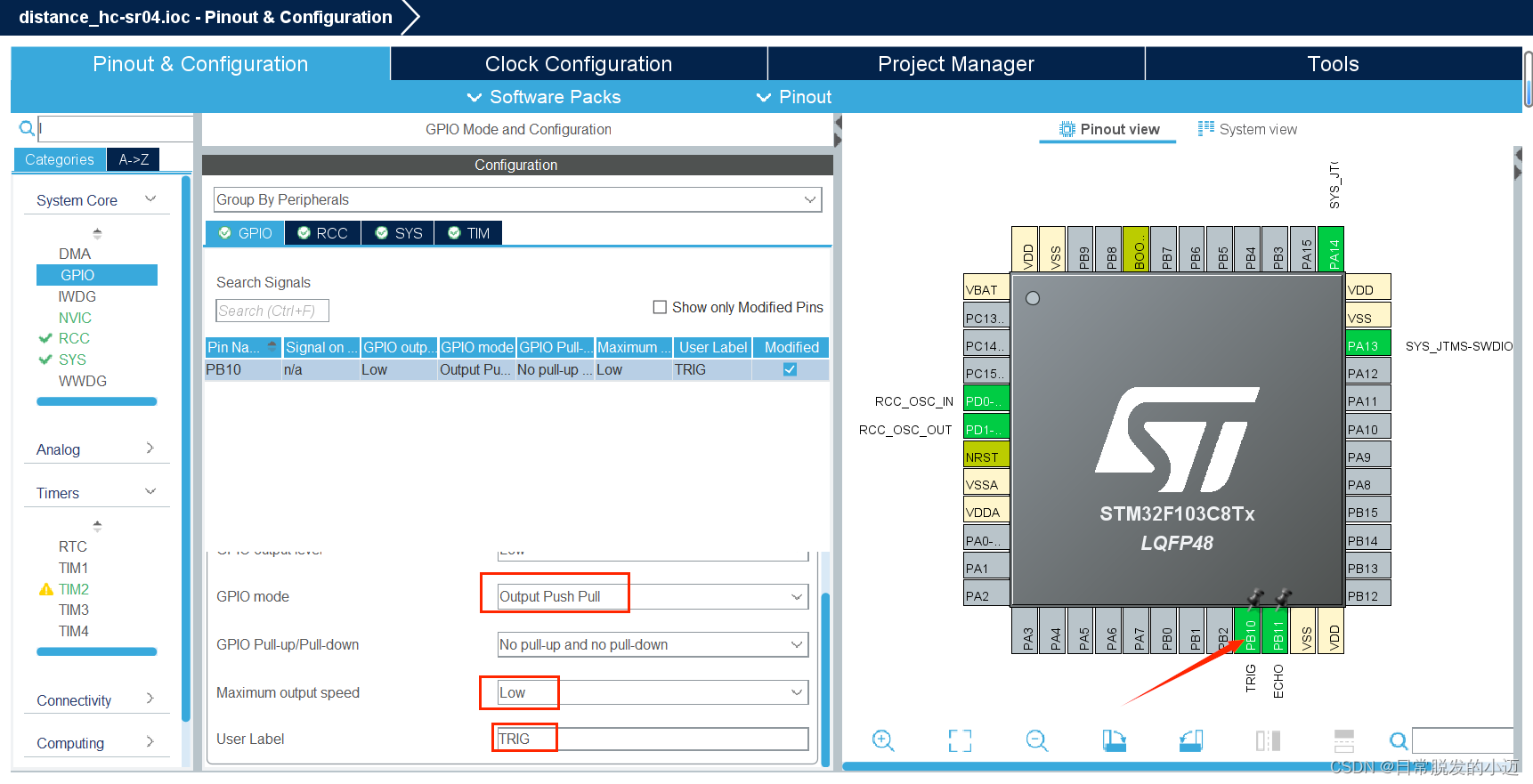
1.3 触发引脚
PB10接到了HC-SR04的TIRG触发引脚,默认输出低电平
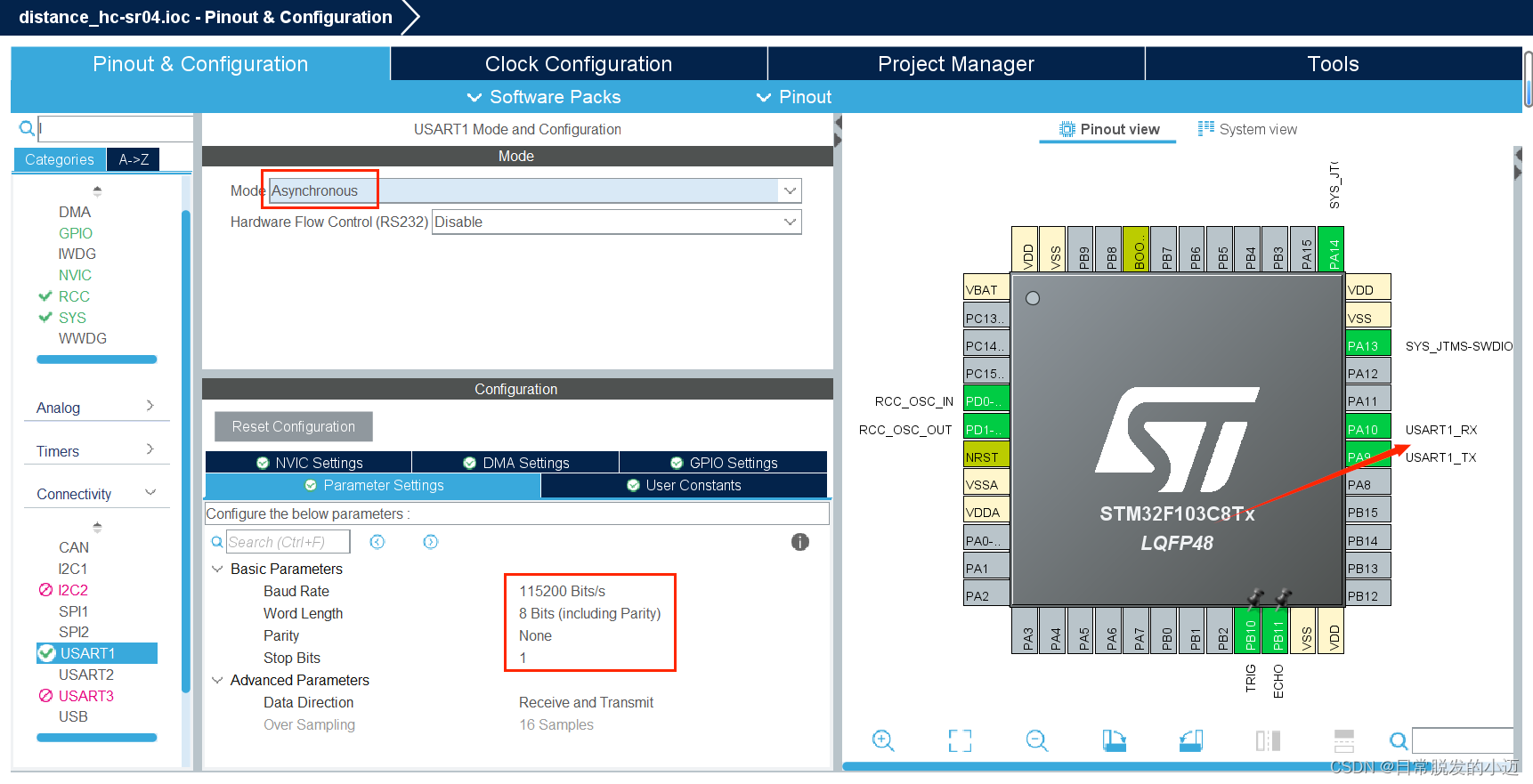
1.4 串口配置
配置usart1
2 代码编写
2.1 添加驱动文件
hc-sr04.h
#ifndef HCSR04_H_
#define HCSR04_H_
#include "main.h"
typedef struct
{
uint8_t edge_state;
uint16_t tim_overflow_counter;
uint32_t prescaler;
uint32_t period;
uint32_t t1; // 上升沿时间
uint32_t t2; // 下降沿时间
uint32_t high_level_us; // 高电平持续时间
float distance;
TIM_TypeDef* instance;
uint32_t ic_tim_ch;
HAL_TIM_ActiveChannel active_channel;
}Hcsr04InfoTypeDef;
extern Hcsr04InfoTypeDef Hcsr04Info;
/**
* @description: 超声波模块的输入捕获定时器通道初始化
* @param {TIM_HandleTypeDef} *htim
* @param {uint32_t} Channel
* @return {*}
*/
void Hcsr04Init(TIM_HandleTypeDef *htim, uint32_t Channel);
/**
* @description: HC-SR04触发
* @param {*}
* @return {*}
*/
void Hcsr04Start(void);
/**
* @description: 定时器计数溢出中断处理函数
* @param {*} main.c中重定义void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef* htim)
* @return {*}
*/
void Hcsr04TimOverflowIsr(TIM_HandleTypeDef *htim);
/**
* @description: 输入捕获计算高电平时间->距离
* @param {*} main.c中重定义void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
* @return {*}
*/
void Hcsr04TimIcIsr(TIM_HandleTypeDef* htim);
/**
* @description: 读取距离
* @param {*}
* @return {*}
*/
float Hcsr04Read(void);
#endif /* HCSR04_H_ */
hc-sr04.c
#include "hc-sr04.h"
Hcsr04InfoTypeDef Hcsr04Info;
/**
* @description: 超声波模块的输入捕获定时器通道初始化
* @param {TIM_HandleTypeDef} *htim
* @param {uint32_t} Channel
* @return {*}
*/
void Hcsr04Init(TIM_HandleTypeDef *htim, uint32_t Channel)
{
/*--------[ Configure The HCSR04 IC Timer Channel ] */
// MX_TIM2_Init(); // cubemx中配置
Hcsr04Info.prescaler = htim->Init.Prescaler; // 72-1
Hcsr04Info.period = htim->Init.Period; // 65535
Hcsr04Info.instance = htim->Instance;
if(Hcsr04Info.ic_tim_ch == TIM_CHANNEL_1)
{
Hcsr04Info.active_channel = HAL_TIM_ACTIVE_CHANNEL_1; // TIM_CHANNEL_1
}
else if(Hcsr04Info.ic_tim_ch == TIM_CHANNEL_2)
{
Hcsr04Info.active_channel = HAL_TIM_ACTIVE_CHANNEL_2; // TIM_CHANNEL_2
}
else if(Hcsr04Info.ic_tim_ch == TIM_CHANNEL_3)
{
Hcsr04Info.active_channel = HAL_TIM_ACTIVE_CHANNEL_3; // TIM_CHANNEL_3
}
else if(Hcsr04Info.ic_tim_ch == TIM_CHANNEL_4)
{
Hcsr04Info.active_channel = HAL_TIM_ACTIVE_CHANNEL_4; // TIM_CHANNEL_4
}
/*--------[ Start The ICU Channel ]-------*/
HAL_TIM_Base_Start_IT(htim);
HAL_TIM_IC_Start_IT(htim, Channel);
}
/**
* @description: HC-SR04触发
* @param {*}
* @return {*}
*/
void Hcsr04Start(void)
{
HAL_GPIO_WritePin(TRIG_GPIO_Port, TRIG_Pin, GPIO_PIN_SET);
HAL_Delay(1); // 10us以上
HAL_GPIO_WritePin(TRIG_GPIO_Port, TRIG_Pin, GPIO_PIN_RESET);
}
/**
* @description: 定时器计数溢出中断处理函数
* @param {*} main.c中重定义void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef* htim)
* @return {*}
*/
void Hcsr04TimOverflowIsr(TIM_HandleTypeDef *htim)
{
if(htim->Instance == Hcsr04Info.instance) //
{
Hcsr04Info.tim_overflow_counter++;
}
}
/**
* @description: 输入捕获计算高电平时间->距离
* @param {*} main.c中重定义void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
* @return {*}
*/
void Hcsr04TimIcIsr(TIM_HandleTypeDef* htim)
{
if((htim->Instance == Hcsr04Info.instance) && (htim->Channel == Hcsr04Info.active_channel))
{
if(Hcsr04Info.edge_state == 0) // 捕获上升沿
{
// 得到上升沿开始时间T1,并更改输入捕获为下降沿
Hcsr04Info.t1 = HAL_TIM_ReadCapturedValue(htim, Hcsr04Info.ic_tim_ch);
__HAL_TIM_SET_CAPTUREPOLARITY(htim, Hcsr04Info.ic_tim_ch, TIM_INPUTCHANNELPOLARITY_FALLING);
Hcsr04Info.tim_overflow_counter = 0; // 定时器溢出计数器清零
Hcsr04Info.edge_state = 1; // 上升沿、下降沿捕获标志位
}
else if(Hcsr04Info.edge_state == 1) // 捕获下降沿
{
// 捕获下降沿时间T2,并计算高电平时间
Hcsr04Info.t2 = HAL_TIM_ReadCapturedValue(htim, Hcsr04Info.ic_tim_ch);
Hcsr04Info.t2 += Hcsr04Info.tim_overflow_counter * Hcsr04Info.period; // 需要考虑定时器溢出中断
Hcsr04Info.high_level_us = Hcsr04Info.t2 - Hcsr04Info.t1; // 高电平持续时间 = 下降沿时间点 - 上升沿时间点
// 计算距离
Hcsr04Info.distance = (Hcsr04Info.high_level_us / 1000000.0) * 340.0 / 2.0 * 100.0;
// 重新开启上升沿捕获
Hcsr04Info.edge_state = 0; // 一次采集完毕,清零
__HAL_TIM_SET_CAPTUREPOLARITY(htim, Hcsr04Info.ic_tim_ch, TIM_INPUTCHANNELPOLARITY_RISING);
}
}
}
/**
* @description: 读取距离
* @param {*}
* @return {*}
*/
float Hcsr04Read(void)
{
// 测距结果限幅
if(Hcsr04Info.distance >= 450)
{
Hcsr04Info.distance = 450;
}
return Hcsr04Info.distance;
}
2.2 修改main.c
- 引用对应的头文件
/* USER CODE BEGIN Includes */
#include "hc-sr04.h"
/* USER CODE END Includes */
- 200ms测距一次
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
Hcsr04Init(&htim2, TIM_CHANNEL_4); // 超声波模块初始化
Hcsr04Start(); // 开启超声波模块测距
printf("hc-sr04 start!\r\n");
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
// 打印测距结果
printf("distance:%.1f cm\r\n", Hcsr04Read());
Hcsr04Start();
HAL_Delay(200); // 测距周期200ms
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
- 重定义定时器的中断服务函数
/* USER CODE BEGIN 4 */
/**
* @description: 定时器输出捕获中断
* @param {TIM_HandleTypeDef} *htim
* @return {*}
*/
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
Hcsr04TimIcIsr(htim);
}
/**
* @description: 定时器溢出中断
* @param {*}
* @return {*}
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef* htim)
{
Hcsr04TimOverflowIsr(htim);
}
/* USER CODE END 4 */
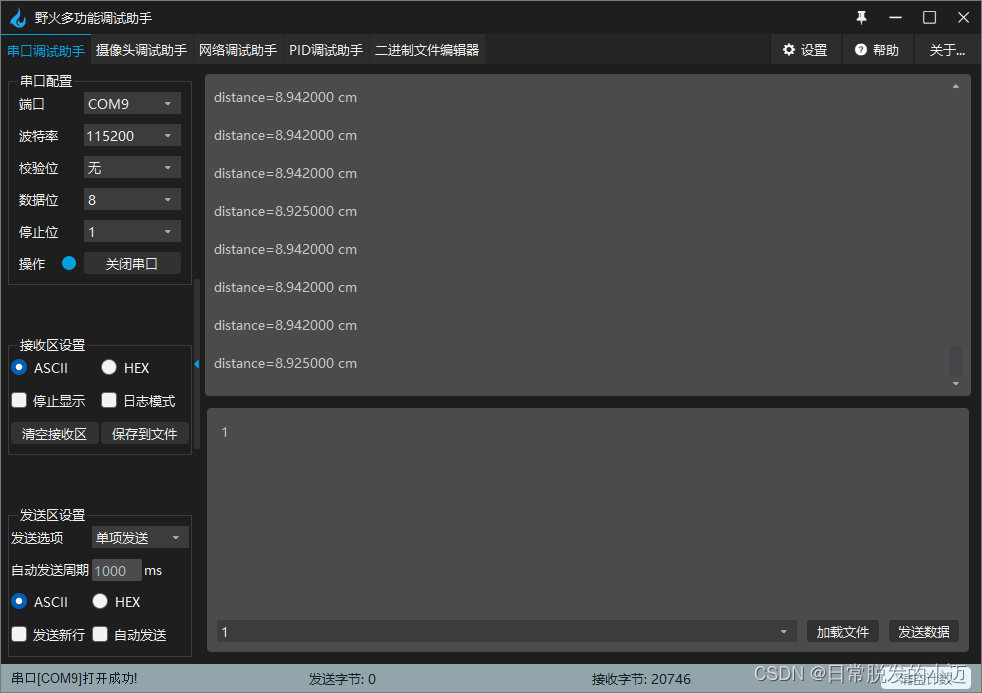
3 实现效果
串口打印结果如下:
实际效果:
参考
https://blog.csdn.net/qq_57709749/article/details/127163487
https://www.bilibili.com/video/av466707130/?vd_source=c1eec1c601c91b92514190b3c15a337b
http://www.taodudu.cc/news/show-5933197.html?action=onClick