【Proteus仿真】51单片机+步进电机驱动
🔖Proteus仿真基础实验-步进电机驱动 🌿Proteus8.12平台
控制脉冲量来控制角位移量,从而达到精确定位的目的,同时还可以通过控制脉冲频率来控制电机的转速和加速度,从而达到速度控制的目的。
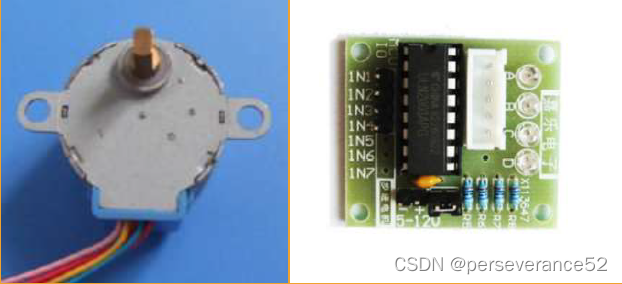
永磁体(PM):一般为两相,扭矩和体积均较低,步进角为 7.5 度或 15 度. 反应式(VR):一般为三相,可实现大扭矩输出,步进角度一般为 1.5 度,但噪音和振动相当大. 混合式(HB) : 它结合了永磁体和反应的优点,分为两相和五相:两相步进角为 1.8 度,五相步进角一般为 0.72 度。 这种步进电机使用更广泛。 步距角: 相数: 拍数:AB-BC-CD-DA-AB,四相和八拍运行模式为: A - AB - B - BC - C - CD - D - DA - A。 步进脚精度 失步 失调角
参数 📚四相步进电机模块资料 链接: https:
提取码: aiwc
步进电机的驱动模式也称为激励模式,分为全步激励和半步激励。 前者也可分为单相(单拍驱动)和两相激励(全步驱动); 后者也指一相二相激励(一步驱动)
驱动模式 步距角 功率 优点和缺点 单步 5.625 1P 控制简单,耗电量低,但输出扭矩最小,振动较大,步进时易疏离 全步 5.625 2P 功耗最大,输出扭矩大,振动小,步进稳定 半步 2.8125 1.5P 在单驱动和驱动步骤之间采取的性能,只有步进角的一半,运行平稳,应用最为广泛
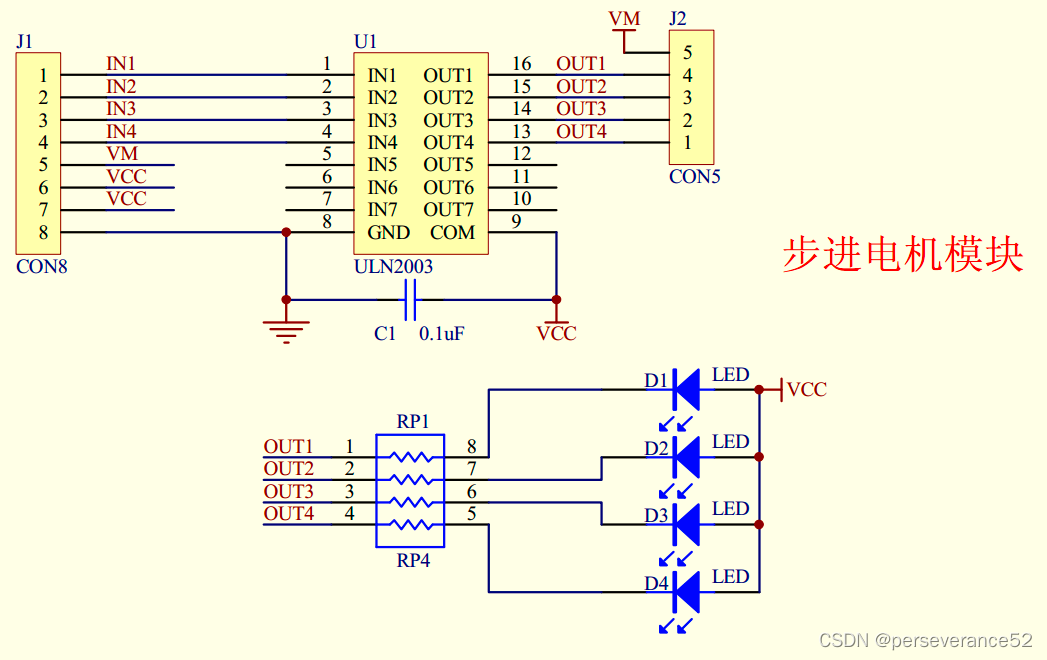
线序/步距 Step1 Step2 Step3 Step4 Step5 Step6 Step7 Step8 蓝色/A 1 1 0 0 0 0 0 1 粉色/B 0 1 1 1 0 1 0 0 黄色/C 0 0 0 1 1 1 0 0 橙色/D 0 0 0 0 0 1 1 1
线序/步距 Step1 Step2 Step3 Step4 蓝色/A 1 0 0 0 粉色/B 0 1 0 0 黄色/C 0 0 1 0 橙色/D 0 0 0 1
线序/步距 Step1 Step2 Step3 Step4 蓝色/A 1 0 0 1 粉色/B 1 1 0 0 黄色/C 0 1 1 0 橙色/D 0 0 1 1
# include <STC89C5xRC.H> # include "intrins.h" # define MAIN_Fosc 11059200L # define uint32 unsigned long # define uint16 unsigned int # define uint8 unsigned char # define MOTOR_CLOCKWISE 1 # define MOTOR_ANTICLOCKWISE 0 # define MOTOR_SPEED 3 = P2^ 3 ;
sbit CC= P2^ 2 ;
sbit BB= P2^ 1 ;
sbit AA= P2^ 0 ;
void delay_ms ( uint16 x)
{
uint16 j, i;
for ( j= 0 ; j< x; j++ )
{
for ( i= 0 ; i< 112 ; i++ ) ;
}
}
void MotorStep ( uint8 X, uint16 Speed)
{
if ( X== 1 )
{
DD= 0 ; CC= 0 ; BB= 0 ; AA= 1 ;
delay_ms ( Speed) ;
DD= 0 ; CC= 0 ; BB= 1 ; AA= 0 ;
delay_ms ( Speed) ;
DD= 0 ; CC= 1 ; BB= 0 ; AA= 0 ;
delay_ms ( Speed) ;
DD= 1 ; CC= 0 ; BB= 0 ; AA= 0 ;
delay_ms ( Speed) ;
}
else
{
DD= 1 ; CC= 0 ; BB= 0 ; AA= 0 ;
delay_ms ( Speed) ;
DD= 0 ; CC= 1 ; BB= 0 ; AA= 0 ;
delay_ms ( Speed) ;
DD= 0 ; CC= 0 ; BB= 1 ; AA= 0 ;
delay_ms ( Speed) ;
DD= 0 ; CC= 0 ; BB= 0 ; AA= 1 ;
delay_ms ( Speed) ;
}
}
int main ( )
{
while ( 1 )
{
MotorStep ( MOTOR_ANTICLOCKWISE, MOTOR_SPEED) ;
}
}
# include <STC89C5xRC.H> # include "intrins.h" # define MAIN_Fosc 11059200L # define uint32 unsigned long # define uint16 unsigned int # define uint8 unsigned char # define MOTOR_CLOCKWISE 1 # define MOTOR_ANTICLOCKWISE 0 # define MOTOR_SPEED 3 = P2^ 3 ;
sbit CC= P2^ 2 ;
sbit BB= P2^ 1 ;
sbit AA= P2^ 0 ;
void delay_ms ( uint16 x)
{
uint16 j, i;
for ( j= 0 ; j< x; j++ )
{
for ( i= 0 ; i< 112 ; i++ ) ;
}
}
void MotorStep ( uint8 X, uint16 Speed)
{
if ( X== 1 )
{
DD= 0 ; CC= 0 ; BB= 1 ; AA= 1 ;
delay_ms ( Speed) ;
DD= 0 ; CC= 1 ; BB= 1 ; AA= 0 ;
delay_ms ( Speed) ;
DD= 1 ; CC= 1 ; BB= 0 ; AA= 0 ;
delay_ms ( Speed) ;
DD= 1 ; CC= 0 ; BB= 0 ; AA= 1 ;
delay_ms ( Speed) ;
}
else
{
DD= 1 ; CC= 0 ; BB= 0 ; AA= 1 ;
delay_ms ( Speed) ;
DD= 1 ; CC= 1 ; BB= 0 ; AA= 0 ;
delay_ms ( Speed) ;
DD= 0 ; CC= 1 ; BB= 1 ; AA= 0 ;
delay_ms ( Speed) ;
DD= 0 ; CC= 0 ; BB= 1 ; AA= 1 ;
delay_ms ( Speed) ;
}
}
int main ( )
{
while ( 1 )
{
MotorStep ( MOTOR_ANTICLOCKWISE, MOTOR_SPEED) ;
}
}
# include <STC89C5xRC.H> # include "intrins.h" # define MAIN_Fosc 11059200L # define uint32 unsigned long # define uint16 unsigned int # define uint8 unsigned char # define MOTOR_CLOCKWISE 1 # define MOTOR_ANTICLOCKWISE 0 # define MOTOR_SPEED 3 = P2^ 3 ;
sbit CC= P2^ 2 ;
sbit BB= P2^ 1 ;
sbit AA= P2^ 0 ;
void delay_ms ( uint16 x)
{
uint16 j, i;
for ( j= 0 ; j< x; j++ )
{
for ( i= 0 ; i< 112 ; i++ ) ;
}
}
void MotorStep ( uint8 X, uint16 Speed)
{
if ( X== 1 )
{
DD= 0 ; CC= 0 ; BB= 0 ; AA= 1 ;
delay_ms ( Speed) ;
DD= 0 ; CC= 0 ; BB= 1 ; AA= 1 ;
delay_ms ( Speed) ;
DD= 0 ; CC= 0 ; BB= 1 ; AA= 0 ;
delay_ms ( Speed) ;
DD= 0 ; CC= 1 ; BB= 1 ; AA= 0 ;
delay_ms ( Speed) ;
DD= 0 ; CC= 1 ; BB= 0 ; AA= 0 ;
delay_ms ( Speed) ;
DD= 1 ; CC= 1 ; BB= 0 ; AA= 0 ;
delay_ms ( Speed) ;
DD= 1 ; CC= 0 ; BB= 0 ; AA= 0 ;
delay_ms ( Speed) ;
DD= 1 ; CC= 0 ; BB= 0 ; AA= 1 ;
delay_ms ( Speed) ;
}
else
{
DD= 1 ; CC= 0 ; BB= 0 ; AA= 1 ;
delay_ms ( Speed) ;
DD= 1 ; CC= 0 ; BB= 0 ; AA= 0 ;
delay_ms ( Speed) ;
DD= 1 ; CC= 1 ; BB= 0 ; AA= 0 ;
delay_ms ( Speed) ;
DD= 0 ; CC= 1 ; BB= 0 ; AA= 0 ;
delay_ms ( Speed) ;
DD= 0 ; CC= 1 ; BB= 1 ; AA= 0 ;
delay_ms ( Speed) ;
DD= 0 ; CC= 0 ; BB= 1 ; AA= 0 ;
delay_ms ( Speed) ;
DD= 0 ; CC= 0 ; BB= 1 ; AA= 1 ;
delay_ms ( Speed) ;
DD= 0 ; CC= 0 ; BB= 0 ; AA= 1 ;
delay_ms ( Speed) ;
}
}
int main ( )
{
while ( 1 )
{
MotorStep ( MOTOR_ANTICLOCKWISE, MOTOR_SPEED) ;
}
}
✨不包含代码工程,自行将上面的代码拷贝到新建工程中编译即可。
链接: https:
提取码: vj47