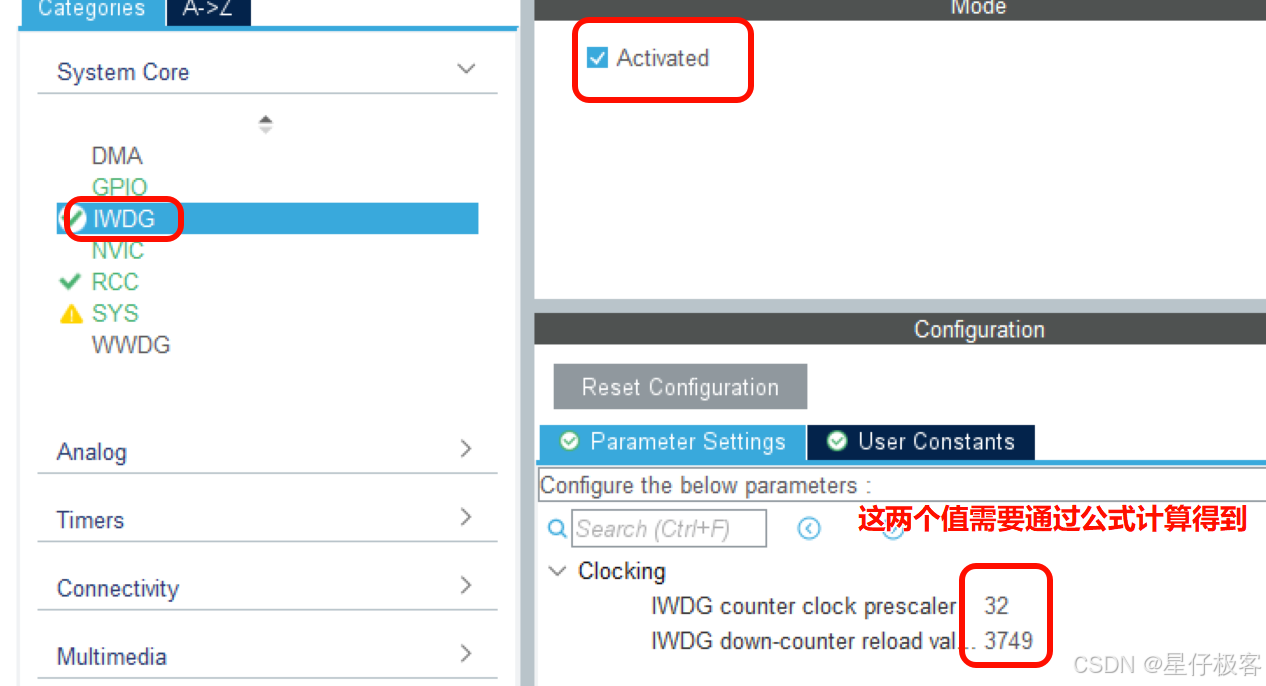
独立看门狗(IWDG)
初始化独立看门狗,在main.c中的 MX_IWDG_Init();,也就是iwdg.c中的初始化代码
void MX_IWDG_Init(void)
{
/* USER CODE BEGIN IWDG_Init 0 */
/* USER CODE END IWDG_Init 0 */
/* USER CODE BEGIN IWDG_Init 1 */
/* USER CODE END IWDG_Init 1 */
hiwdg.Instance = IWDG;
hiwdg.Init.Prescaler = IWDG_PRESCALER_32;
hiwdg.Init.Reload = 3749;
if (HAL_IWDG_Init(&hiwdg) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN IWDG_Init 2 */
/* USER CODE END IWDG_Init 2 */
}检查是否设置RCC标志,获取看门狗是否复位标志,在 stm32f1xx_hal_rcc.h 文件中
/** @brief Check RCC flag is set or not.
* @param __FLAG__ specifies the flag to check.
* This parameter can be one of the following values:
* @arg @ref RCC_FLAG_HSIRDY HSI oscillator clock ready.
* @arg @ref RCC_FLAG_HSERDY HSE oscillator clock ready.
* @arg @ref RCC_FLAG_PLLRDY Main PLL clock ready.
@if STM32F105xx
* @arg @ref RCC_FLAG_PLL2RDY Main PLL2 clock ready.
* @arg @ref RCC_FLAG_PLLI2SRDY Main PLLI2S clock ready.
@elsif STM32F107xx
* @arg @ref RCC_FLAG_PLL2RDY Main PLL2 clock ready.
* @arg @ref RCC_FLAG_PLLI2SRDY Main PLLI2S clock ready.
@endif
* @arg @ref RCC_FLAG_LSERDY LSE oscillator clock ready.
* @arg @ref RCC_FLAG_LSIRDY LSI oscillator clock ready.
* @arg @ref RCC_FLAG_PINRST Pin reset.
* @arg @ref RCC_FLAG_PORRST POR/PDR reset.
* @arg @ref RCC_FLAG_SFTRST Software reset.
* @arg @ref RCC_FLAG_IWDGRST Independent Watchdog reset.
* @arg @ref RCC_FLAG_WWDGRST Window Watchdog reset.
* @arg @ref RCC_FLAG_LPWRRST Low Power reset.
* @retval The new state of __FLAG__ (TRUE or FALSE).
*/
#define __HAL_RCC_GET_FLAG(__FLAG__) (((((__FLAG__) >> 5U) == CR_REG_INDEX)? RCC->CR : \
((((__FLAG__) >> 5U) == BDCR_REG_INDEX)? RCC->BDCR : \
RCC->CSR)) & (1U << ((__FLAG__) & RCC_FLAG_MASK)))stm32f1xx_hal.h中,获取系统时间戳
uint32_t HAL_GetTick(void);喂狗函数在 stm32f1xx_hal_iwdg.h 中
/* I/O operation functions ****************************************************/
HAL_StatusTypeDef HAL_IWDG_Refresh(IWDG_HandleTypeDef *hiwdg);业务逻辑代码,按键触发中断,中断中喂狗,喂狗关闭LED灯,看门狗触发复位打开LED灯
Kye_EXTI.c
#include "stm32f1xx_hal.h"
extern IWDG_HandleTypeDef hiwdg;
static uint32_t lastInterruptTime = 0;
#define DEBOUNCE_DELAY 10 // 消抖时间(ms)
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if (GPIO_Pin == GPIO_PIN_4)
{
uint32_t currentTime = HAL_GetTick();
// 检查是否在消抖时间内
if ((currentTime - lastInterruptTime) >= DEBOUNCE_DELAY)
{
if (HAL_GPIO_ReadPin(GPIOE,GPIO_PIN_4) == GPIO_PIN_RESET)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_5, GPIO_PIN_SET);
HAL_IWDG_Refresh(&hiwdg);
}
lastInterruptTime = currentTime;
}
}
}
main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "iwdg.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_IWDG_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
if (__HAL_RCC_GET_FLAG(RCC_FLAG_IWDGRST))
{
// 如果是看门狗复位,则翻转LED
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_5, GPIO_PIN_RESET);
// 清除复位标志
__HAL_RCC_CLEAR_RESET_FLAGS();
}
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_LSI | RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.LSIState = RCC_LSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
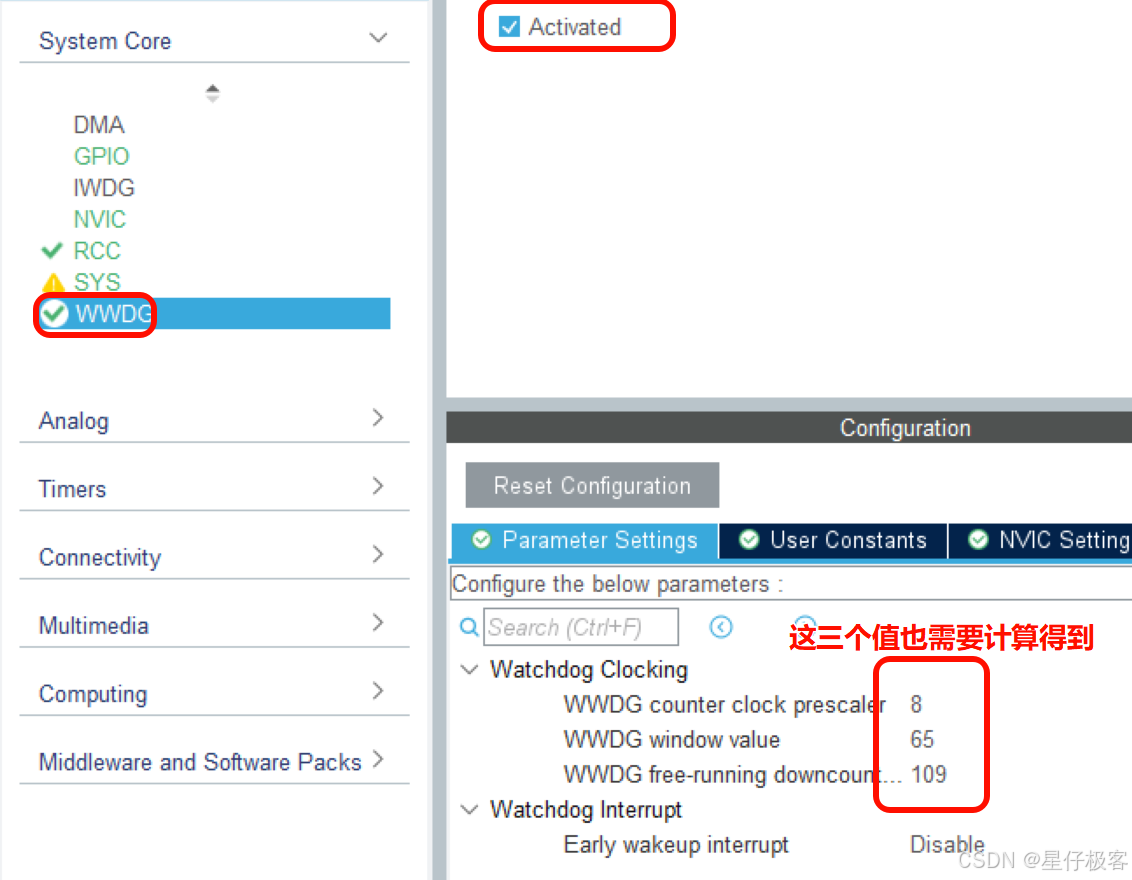
窗口看门狗(WWDG)
初始化窗口看门狗,在main.c中 MX_WWDG_Init();,也就是wwdg.c中的初始化代码
/* WWDG init function */
void MX_WWDG_Init(void)
{
/* USER CODE BEGIN WWDG_Init 0 */
/* USER CODE END WWDG_Init 0 */
/* USER CODE BEGIN WWDG_Init 1 */
/* USER CODE END WWDG_Init 1 */
hwwdg.Instance = WWDG;
hwwdg.Init.Prescaler = WWDG_PRESCALER_8;
hwwdg.Init.Window = 65;
hwwdg.Init.Counter = 109;
hwwdg.Init.EWIMode = WWDG_EWI_DISABLE;
if (HAL_WWDG_Init(&hwwdg) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN WWDG_Init 2 */
/* USER CODE END WWDG_Init 2 */
}
void HAL_WWDG_MspInit(WWDG_HandleTypeDef* wwdgHandle)
{
if(wwdgHandle->Instance==WWDG)
{
/* USER CODE BEGIN WWDG_MspInit 0 */
/* USER CODE END WWDG_MspInit 0 */
/* WWDG clock enable */
__HAL_RCC_WWDG_CLK_ENABLE();
/* USER CODE BEGIN WWDG_MspInit 1 */
/* USER CODE END WWDG_MspInit 1 */
}
}喂狗函数在 stm32f1xx_hal_wwdg.h 中
/* I/O operation functions ******************************************************/
HAL_StatusTypeDef HAL_WWDG_Refresh(WWDG_HandleTypeDef *hwwdg);业务逻辑代码,按键触发中断,中断中喂狗,喂狗关闭LED灯,看门狗触发复位打开LED灯,
Key.c
#include "stm32f1xx_hal.h"
extern WWDG_HandleTypeDef hwwdg;
static uint32_t time_temp = 0;
#define time_ois 10
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if (GPIO_Pin == GPIO_PIN_4) {
uint32_t currentTime = HAL_GetTick();
if ((currentTime-time_temp) > time_ois)
{
if(HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_4) == GPIO_PIN_RESET)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_5, GPIO_PIN_SET);
HAL_WWDG_Refresh(&hwwdg);
}
}
time_temp = currentTime;
}
}
main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "wwdg.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_WWDG_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
if (__HAL_RCC_GET_FLAG(RCC_FLAG_WWDGRST))
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_5, GPIO_PIN_RESET);
// 清除复位标志
__HAL_RCC_CLEAR_RESET_FLAGS();
}
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */