链接:人体关键点检测与MMPose_哔哩哔哩_bilibili
赶了个进度,实际上没听到,一个方向被浓缩成50分钟是有点难度。后续有需要再回顾吧
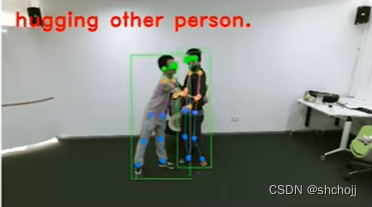
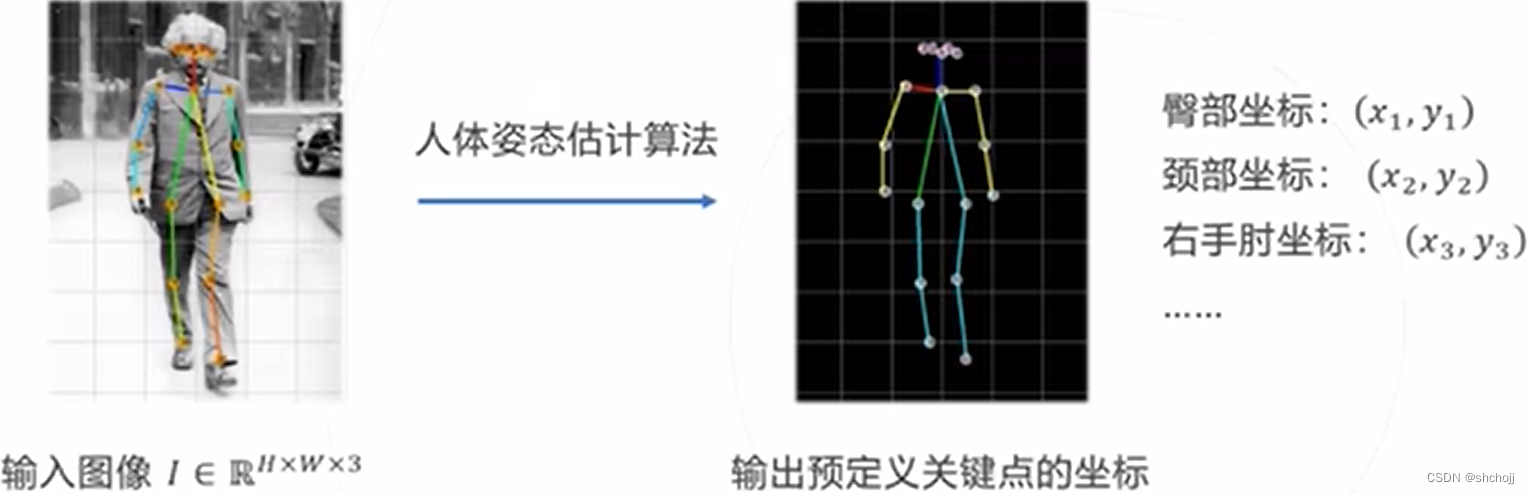
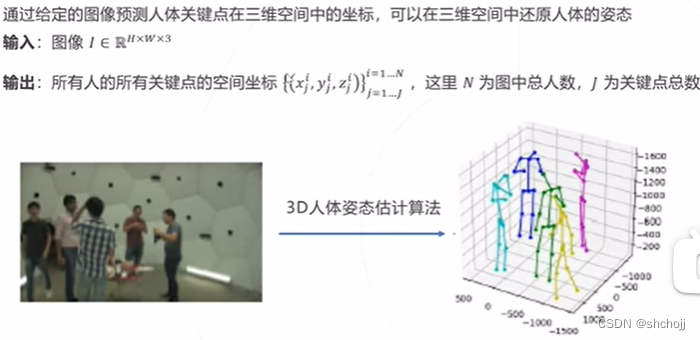
人体姿态估计:识别人体关键点坐标。模式识别任务,难点是始终在变化。以关键点连线,2/3D中还原人体姿态。PoseC3D:基于人体姿态识别行为动作。CG动画追踪表情、手势姿态等。
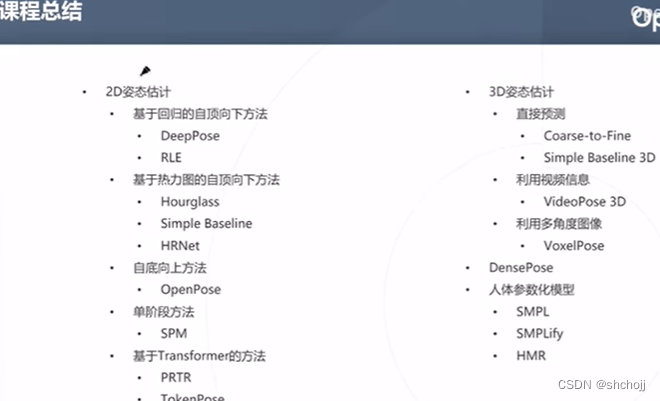
- 人体姿态估计的介绍与运用
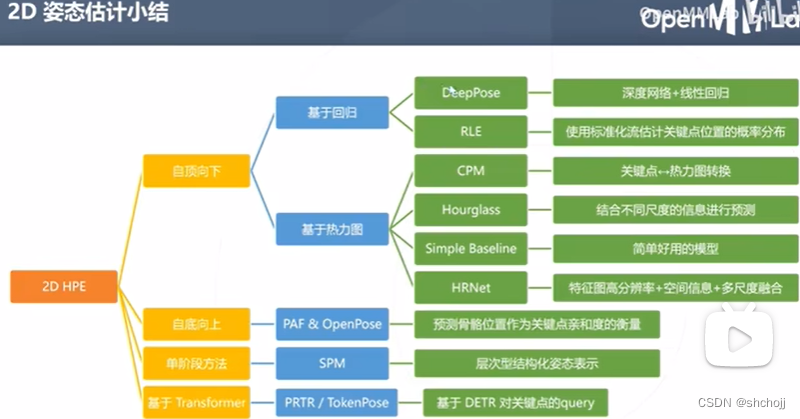
- 2D姿态估计
- 自顶向下
- 自底向上
- 单阶段
- 基于transformer
- 3D姿态估计
- 人体姿态估计的评估方法
- DensePose
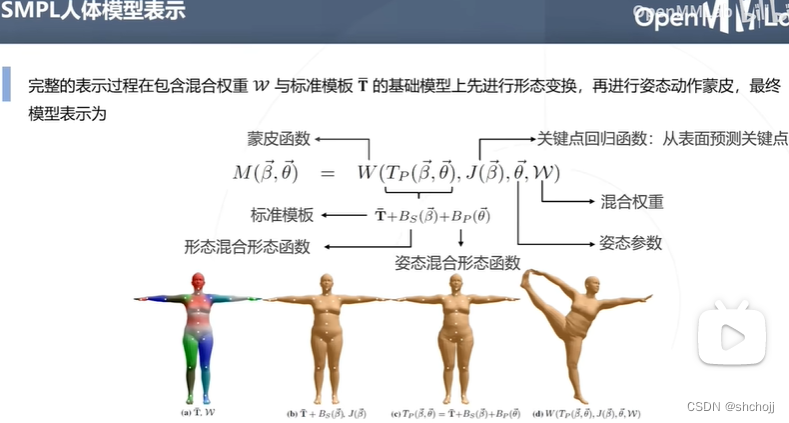
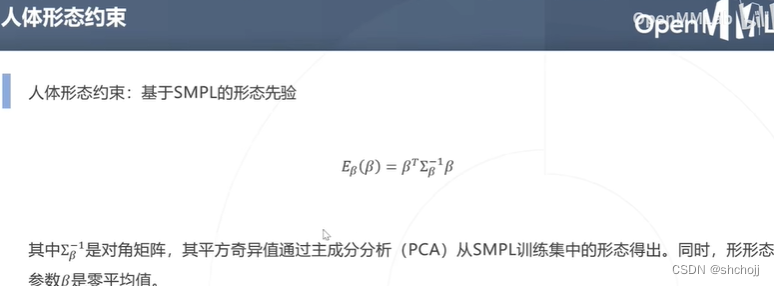
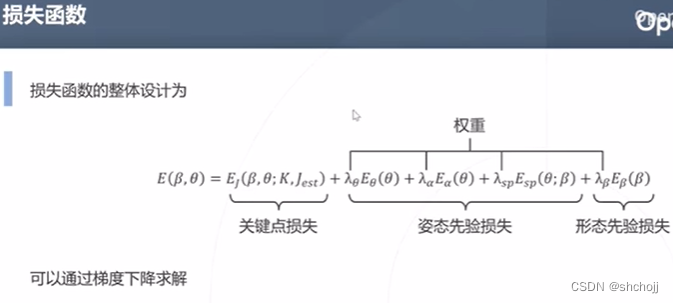
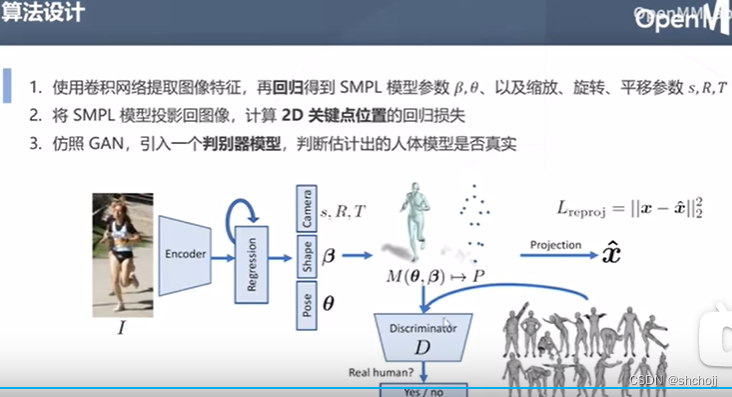
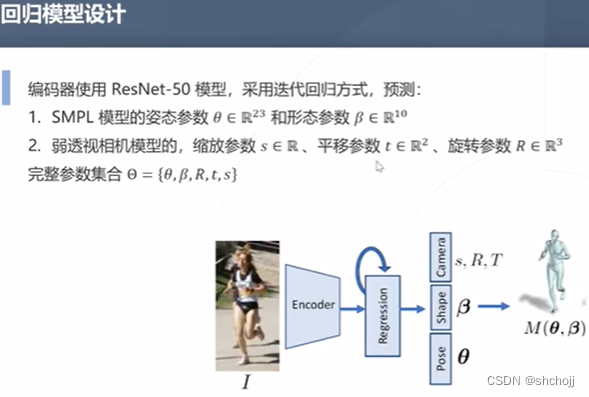
- 人体参数化模型
一、2D姿态估计
1.1基于regression based
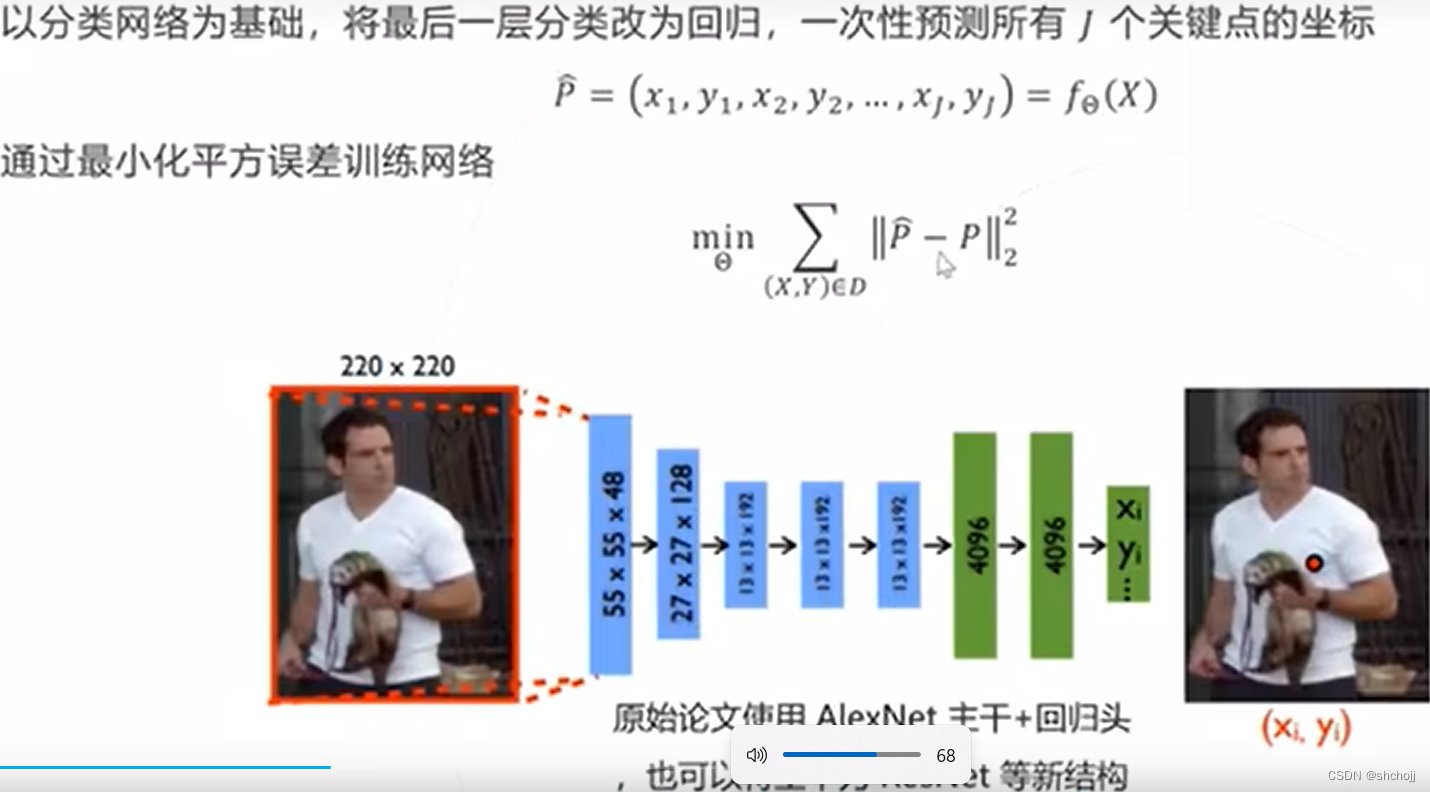
将关键点的检测变成一个回归问题
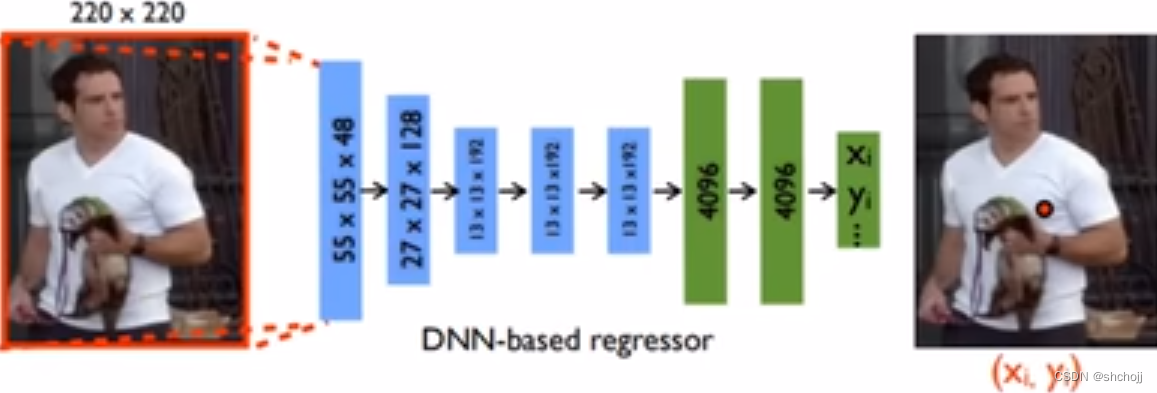
输入一张图像,输出一个回归的坐标,类似于boundingbox回归的感觉。但是精度不高。是监督学习。
1.2 Heatmap Based
不直接回归关键点坐标,量预测关键点任务变成每个位置的概率
表示关键点
位于
的概率为1,
是热力图,尺寸与原图像
相同或者按比例缩小,概率图啊。
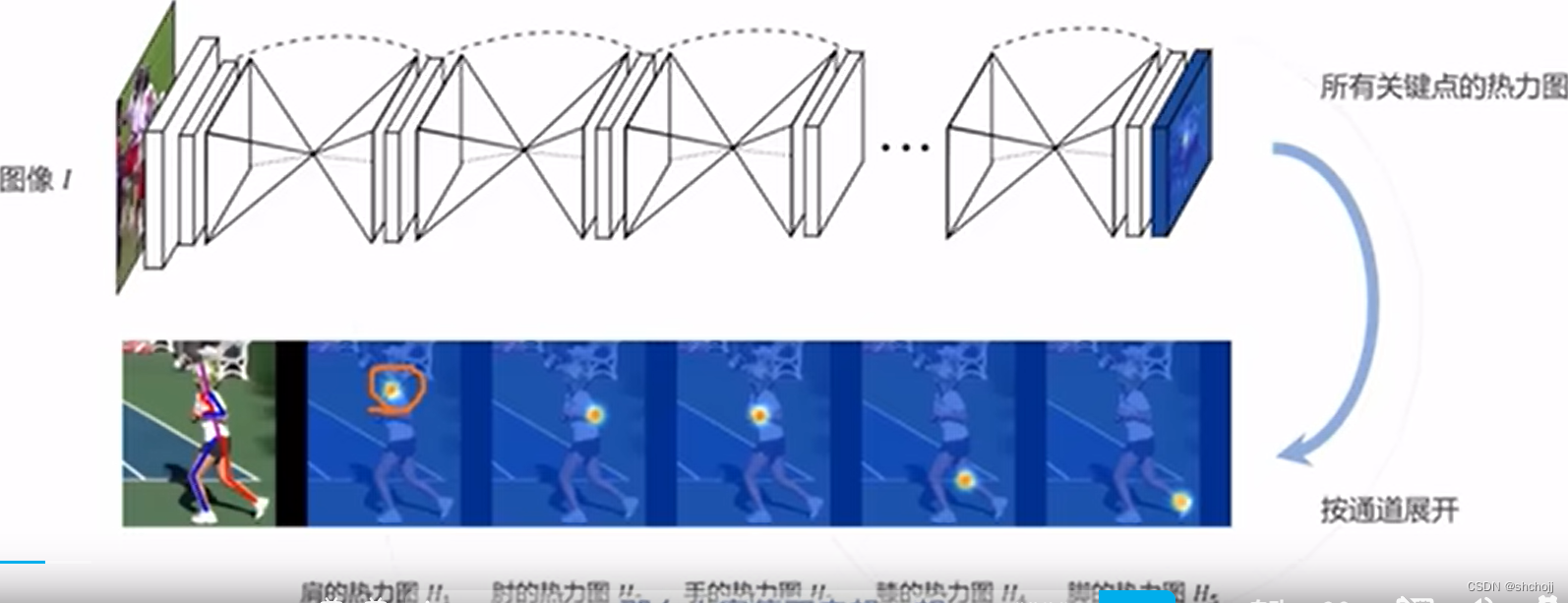
类似于分类概率了吧。可以通过求极大值的方法得到关键点的坐标。
热力图相对回归坐标容易一些,模型精度也更高(讲着认为热力图识别关键点符合神经网络特性),但是热力图计算量也比较大。
1.3关键点热力图的标注
搜索
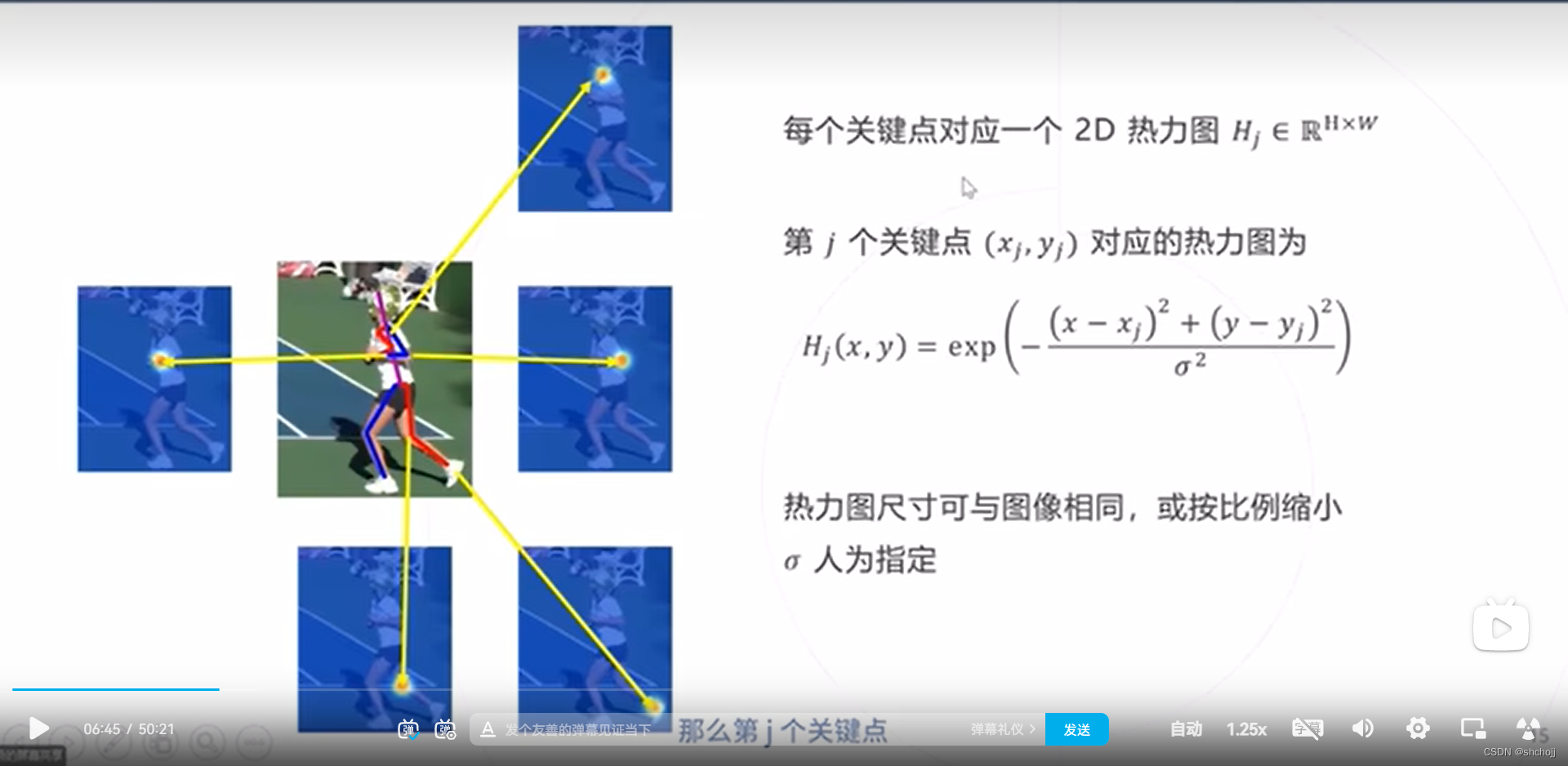
将每个点的概率,通过高斯核变成一个热力的概率图。
1.4使用热力图训练模型
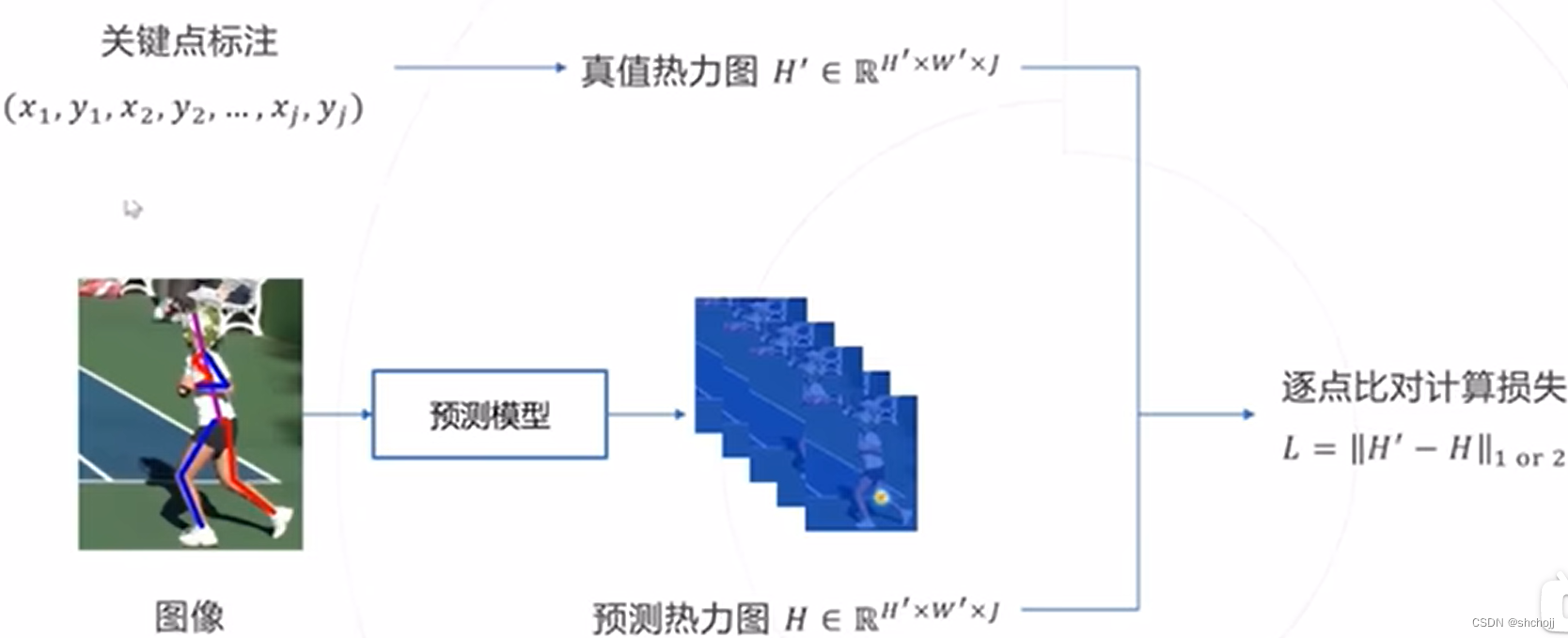
输入图像->预测热力图
关键点->高斯模糊后的热力图
损失函数是1范式或者2范式
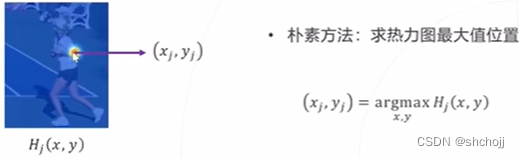
1.5 从热力图中还原关键点
- 朴素方法:求最大概率点。多个点不够鲁棒,另外讲着提到结果不是高斯的?
- 归一化概率,取其期望,即高斯重心
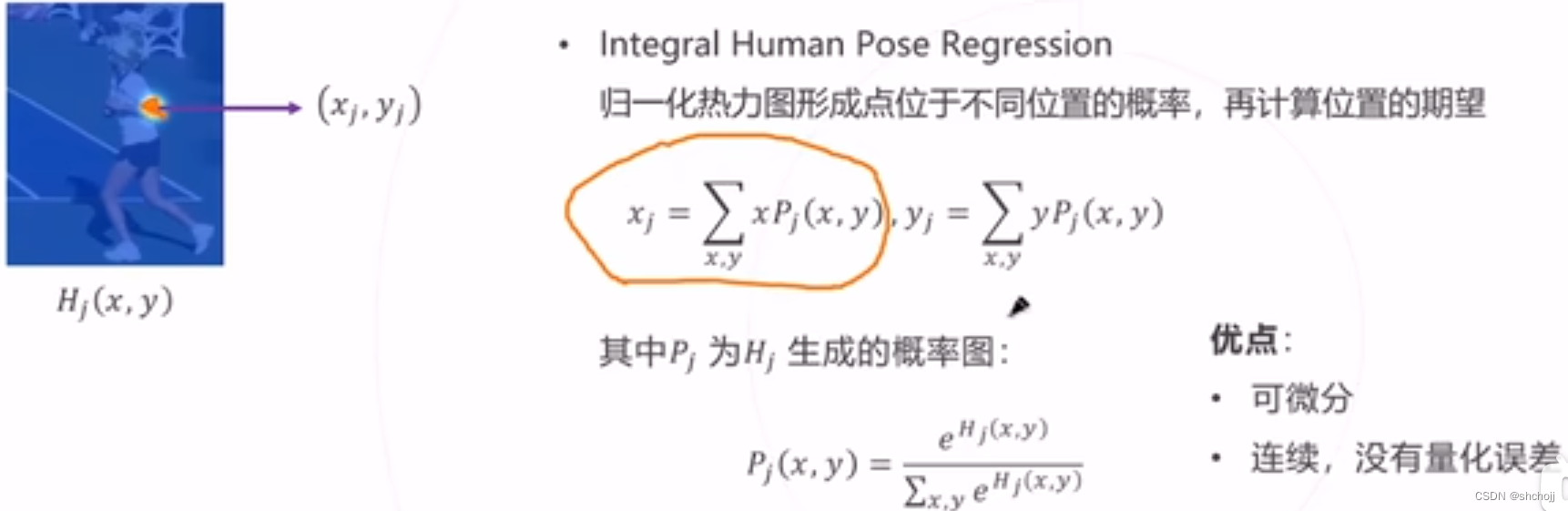 因为是网络是反向传播,模型可以求导,热力图是可以求导的,坐标也可以求导,从而指引热力图
因为是网络是反向传播,模型可以求导,热力图是可以求导的,坐标也可以求导,从而指引热力图
1.6 自顶向下的方法(多人估计)
先检测人,然后做单肢体的估计
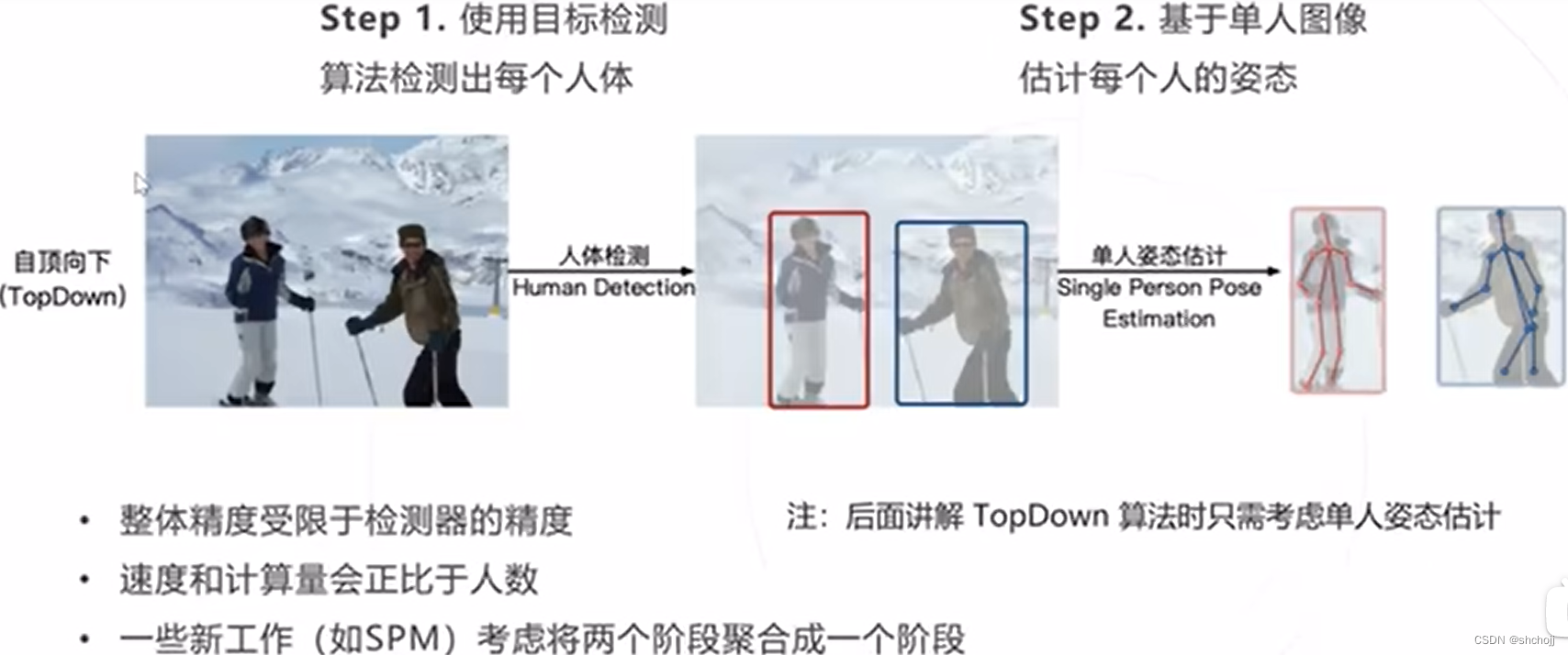
- 整体精度受限于检测器的精度,也就是第一环节的行人识别者确度影响随后的环节。也就是精度
- 速度和计算量与人数成正比。也就是速度。
- 多阶段模型
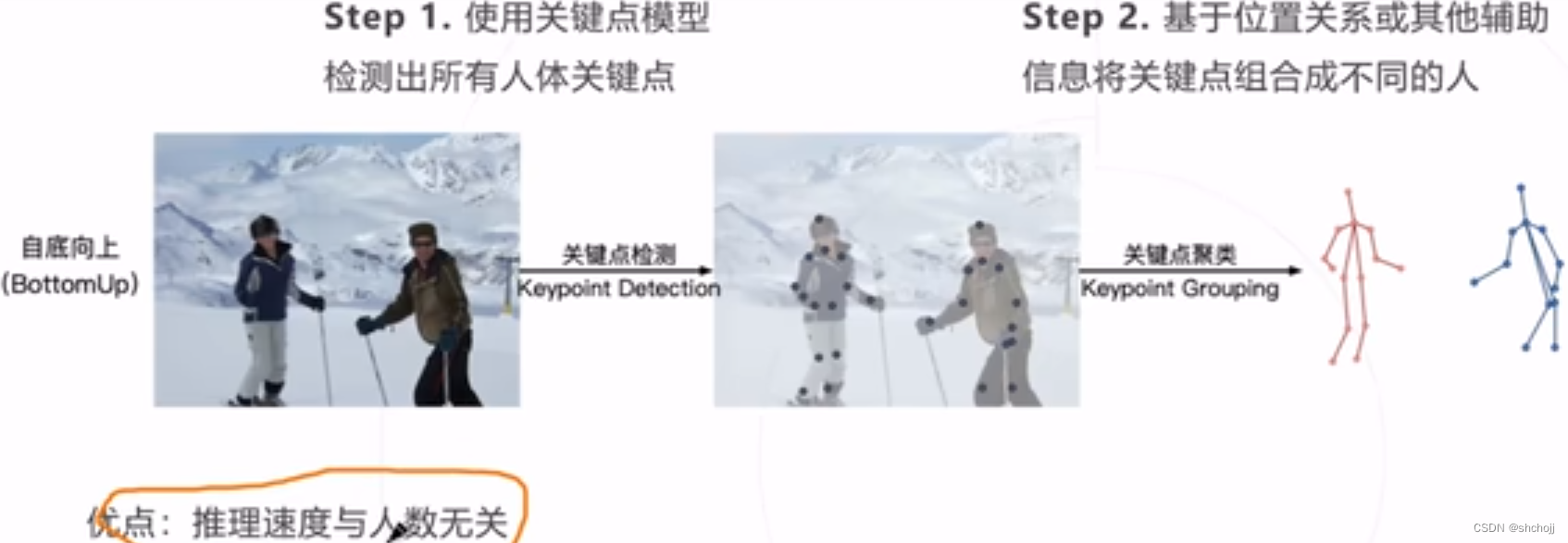
1.7 自底向上(多人估计)
先检测关键点,然后在组合成单个任务形态
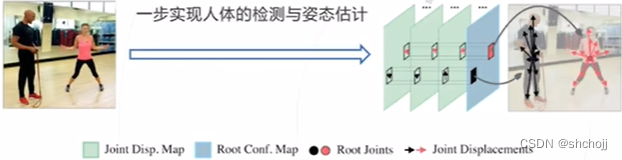
1.8 单阶段(多人估计)
1.9 基于回归的自顶向下方法
DeepPose(2014)
通过级联提升精度 
所有预测类的网络都里能发现这种思路,多阶段变成单阶段,然后单网络变成级联网络。
回归方法的优势与劣势
优势:
- 回归精度无上限,但热力图受限特征图空间分辨率。
- 热力图计算需要在高分辨率特征图上,因此计算成本高。
劣势:
- 图像到关键点坐标映射是高度非线性的,更难收敛,精度也比热力图差。2D关键点预测大部分集中于基于热力图。
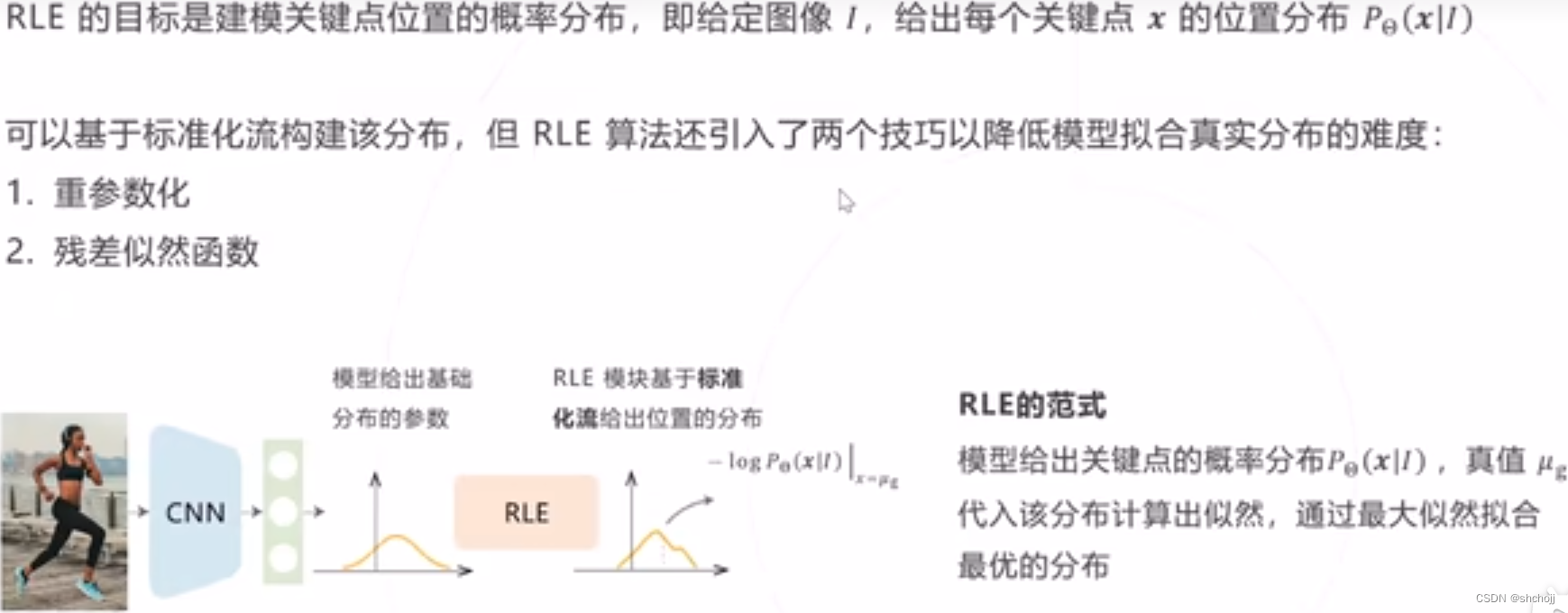
Residual Log-likelihood Estimation(RLE) (2021)
对关键点位置进行更准确的概率建模,从而提高位置预测的精度
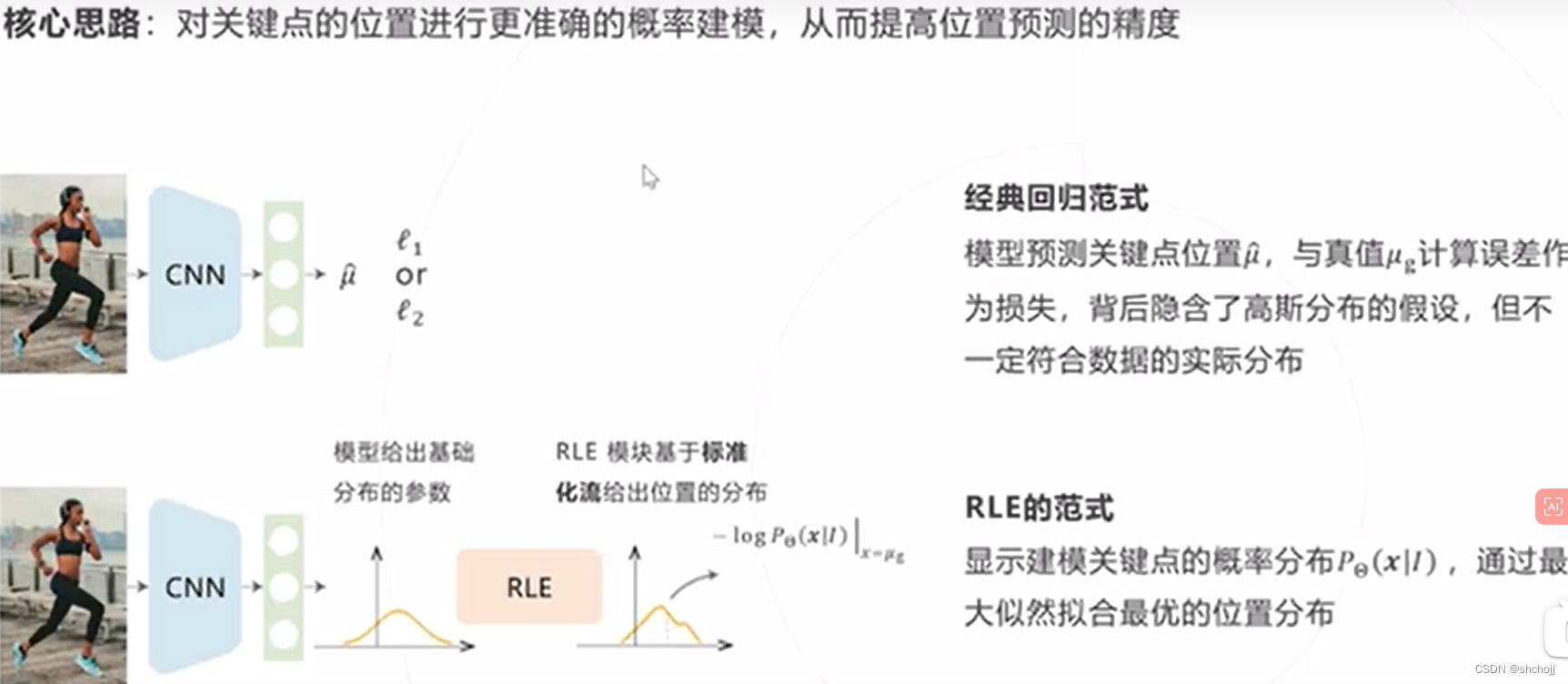
高斯分布不一定符合数据的真实分布???使用均值比较,就是默认服从高斯分布,如果均值一致,服从的分布一致???这里的高斯核刚才讲到的热力图,通过高斯模糊是一个意思,点位置的高斯。
RLE主要是构建概率分布,然后通过最大似然。
回归和最大似然估计的联系。
这里揭示了为啥基于均值比较的二范数回归问题暗含高斯分布。固定方程和各向同性???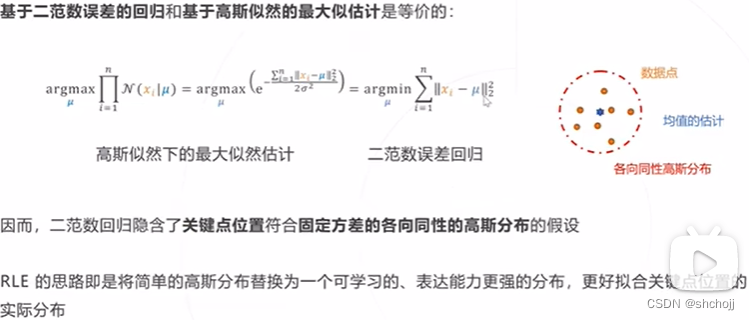
RLE是一个可学习的分布???
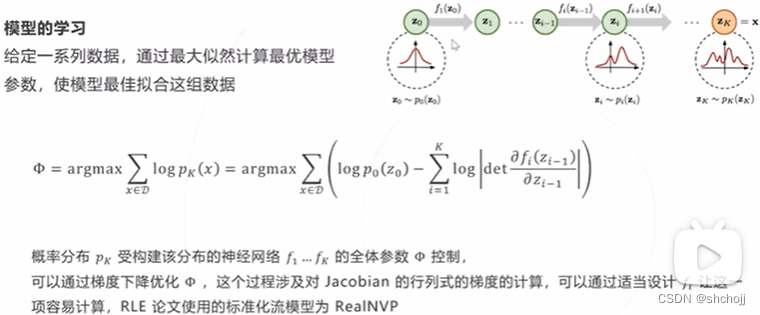
标准化流 Normalizing Flow

这个是什么意思呢?神经网络学习一个映射?将最初的概率分部映射成复杂的概率密度函数 ?
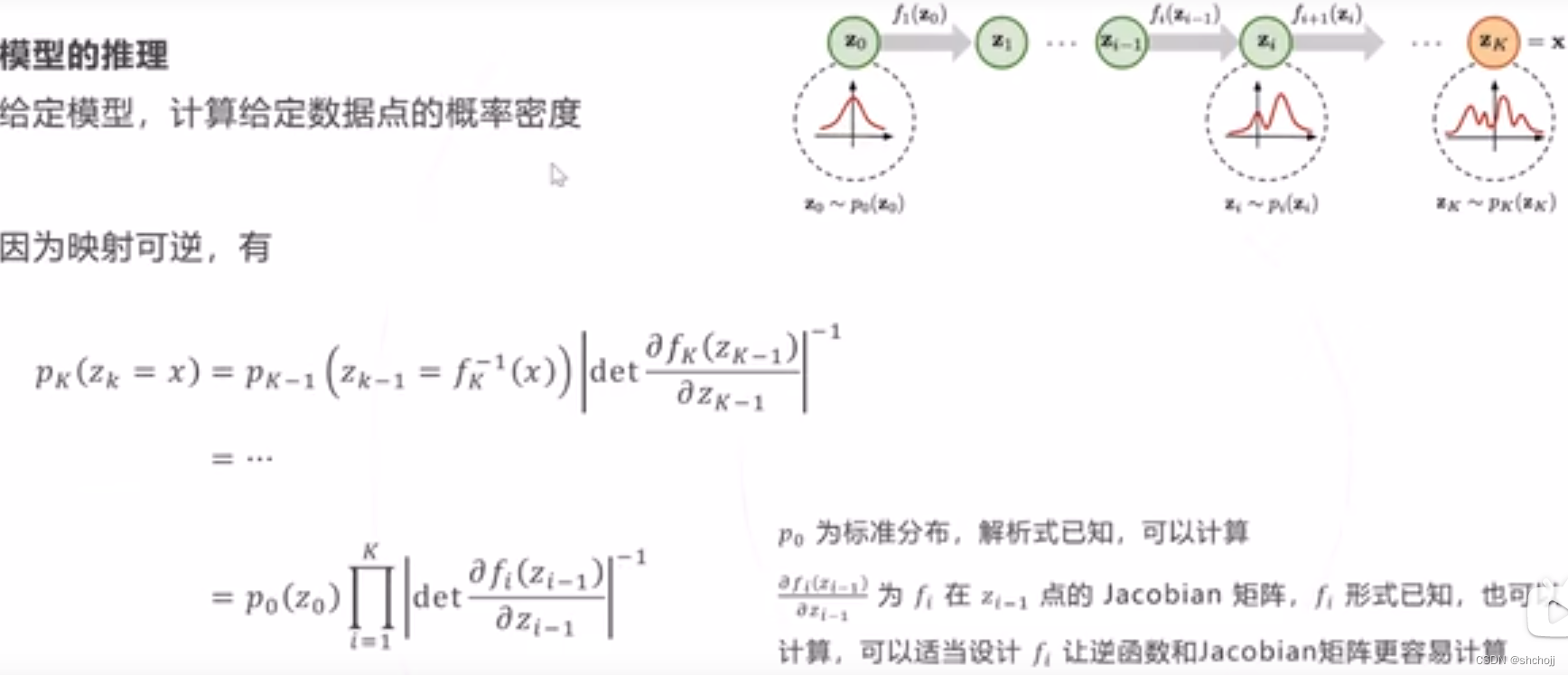
正向变换是求解映射函数?逆向映射就可以将复杂概率函数恢复成原始的概率分部。
实际上应该是复杂、都类型的分布以通用形式组合而来,类似于小波变换什么的。。。
重参数化设计
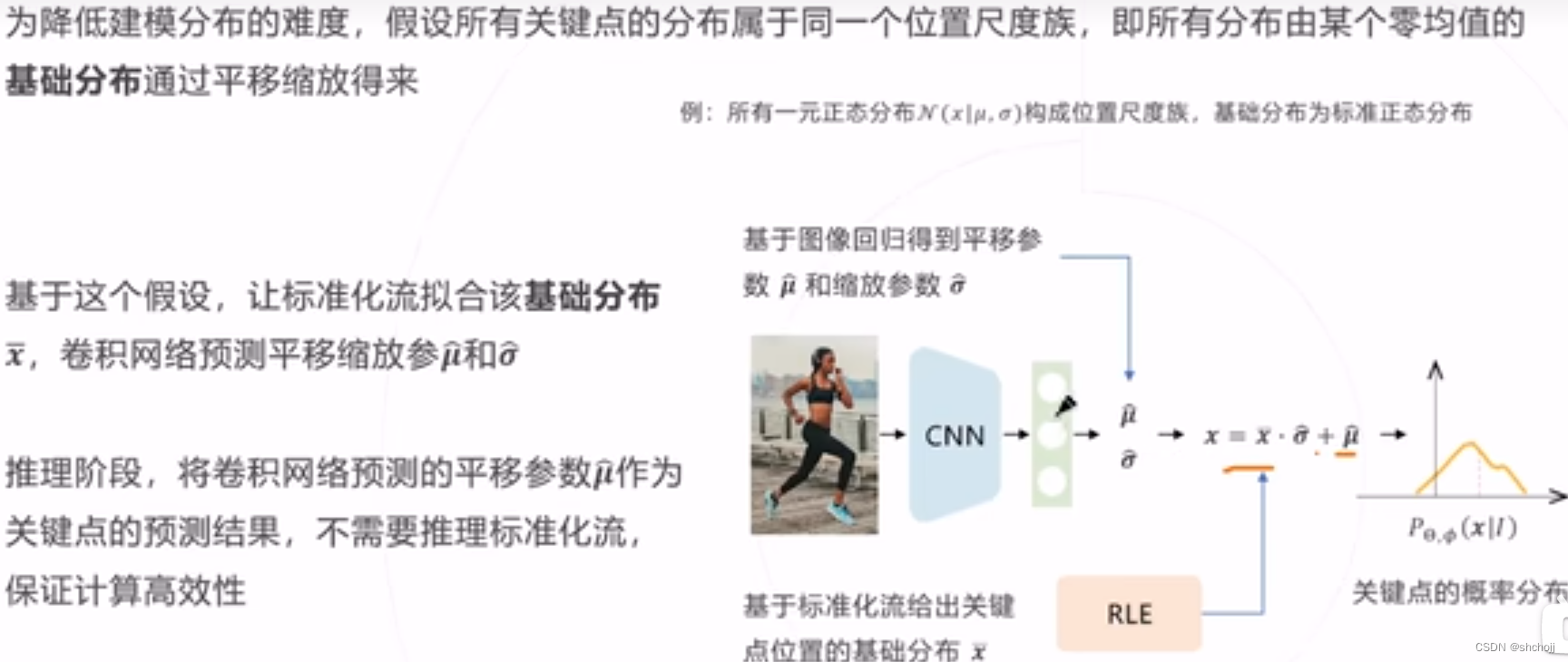
也就是将复杂的概率分部通过使用高斯分布去表示,这个是网络模型中常用的方案,在VAE等模型中也提到过。
残差似然函数
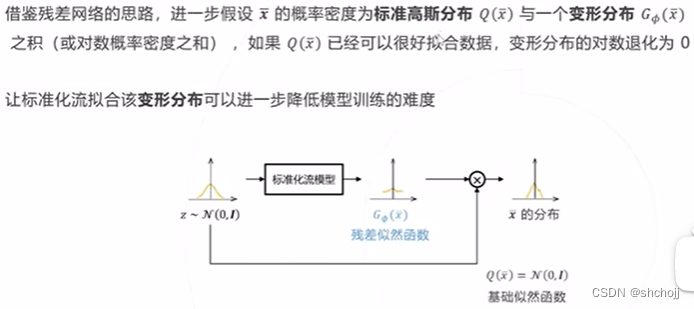
也就是在高斯分布x的基础上有一个x_0的概念,这个x_0就是残差似然
完整的RLE模型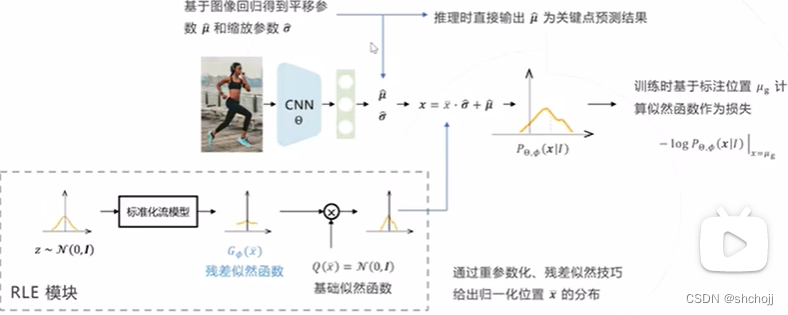
残差似然 x 基础似然,通过均值和方差进行平移拉伸,得到最终的似然函数P
基于热力图的自顶向下的方法
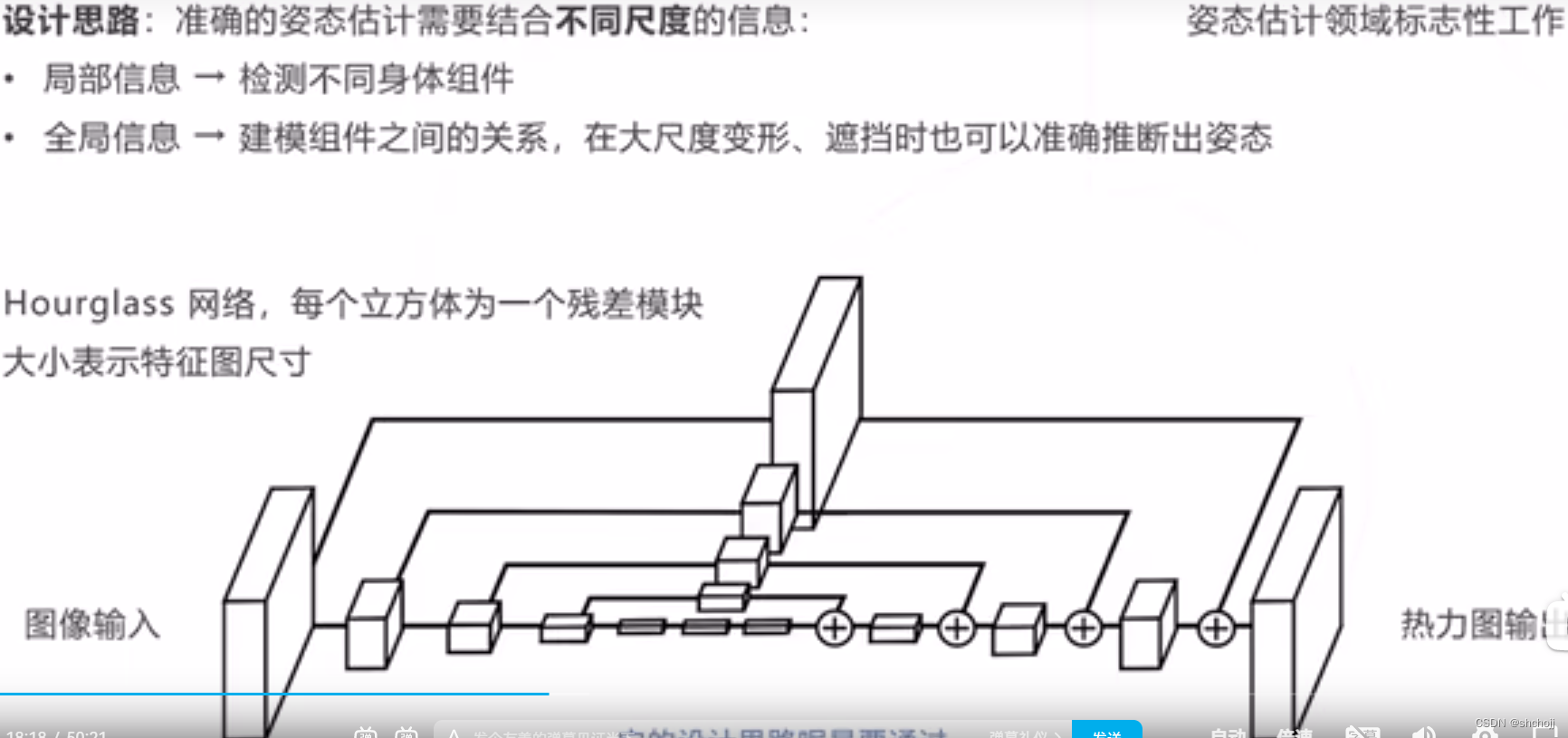
网络模型少不了的几大内容都提到了,局部信息、全局信息、残差链接,最终的目的生成热力图
级联的hourglass模块
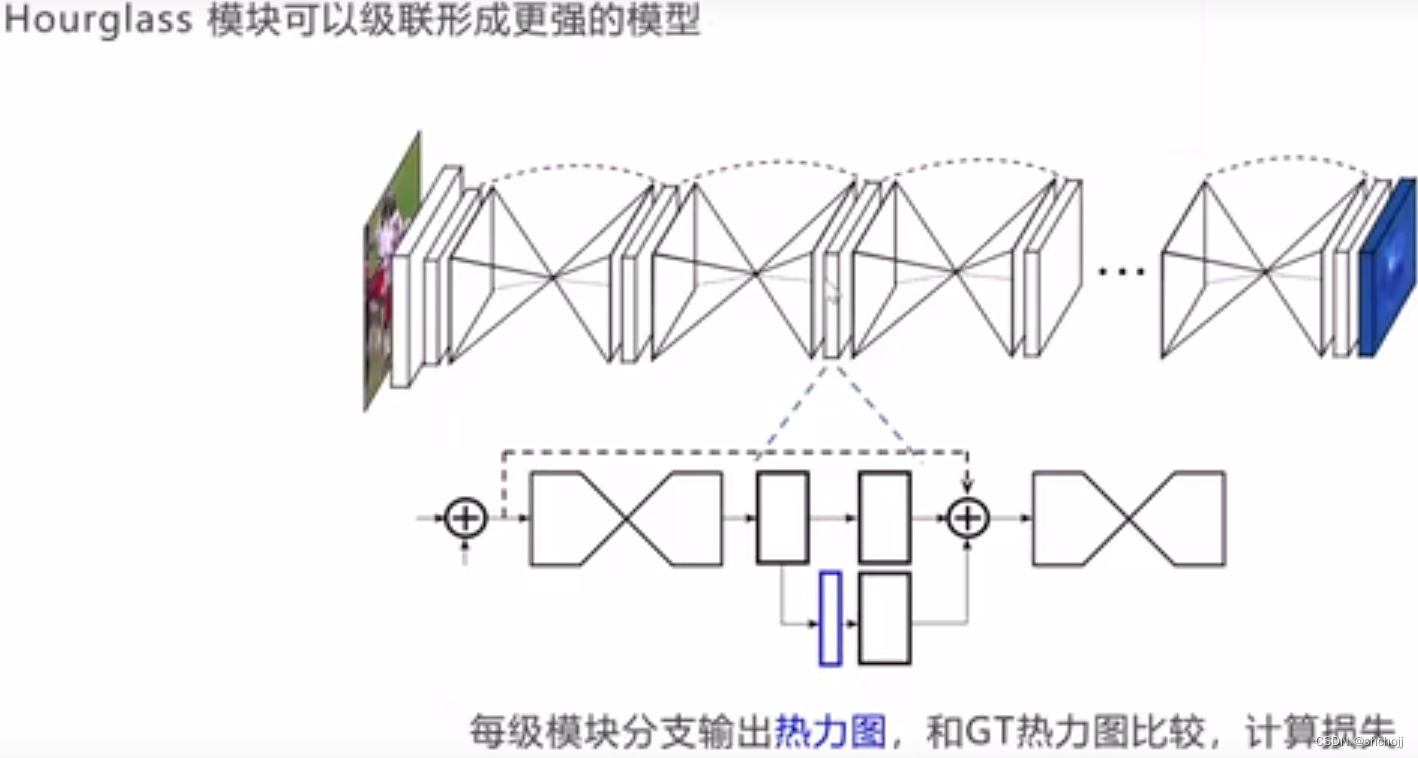
常规的级联套路,就是一级一级的裁剪、细化

simple Baseline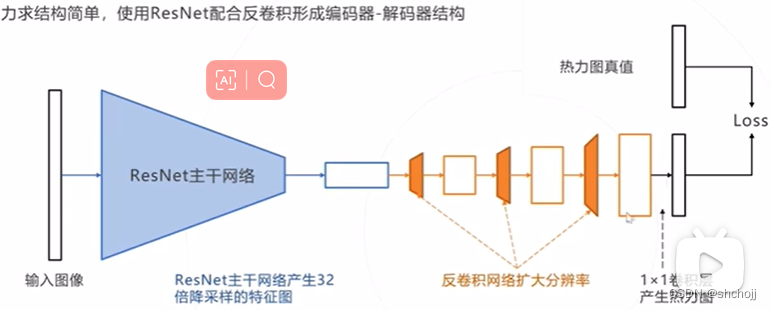
特征提取网络改成resnet了
HRNet
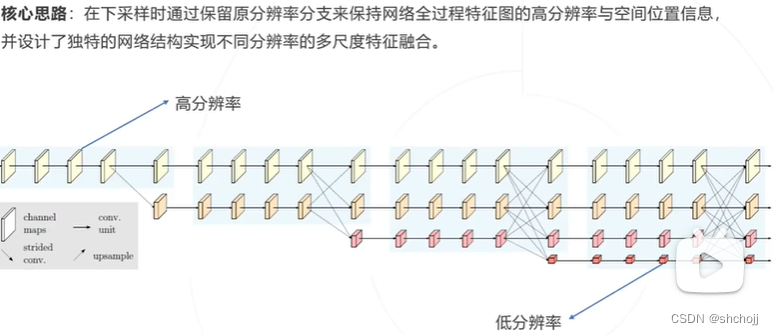
多分辨率网络结构的特征融合,实际上这种网络画起来这种形式反而不好看懂。
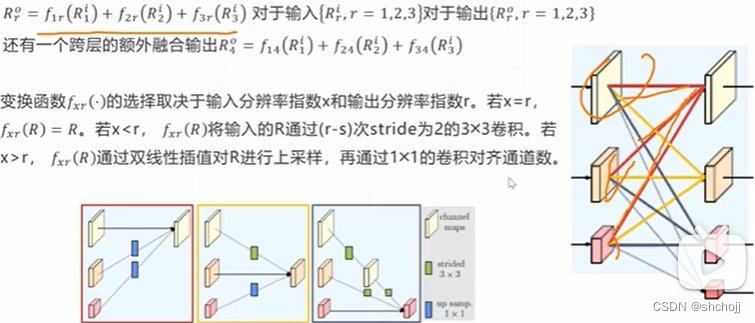
这里讲的更多的是融合策略,maxpooling,感觉这种网络结构比较复杂,鲁棒性可能更低,因为相对而言被过拟合了。
HRNet配合不同任务头

自底向上
Part Affinity Fields & OpenPose
先检测关键点,和四肢走向(四肢走向?),然后利用聚类,两个关键点有某段肢体相连,则关键点属于同一人。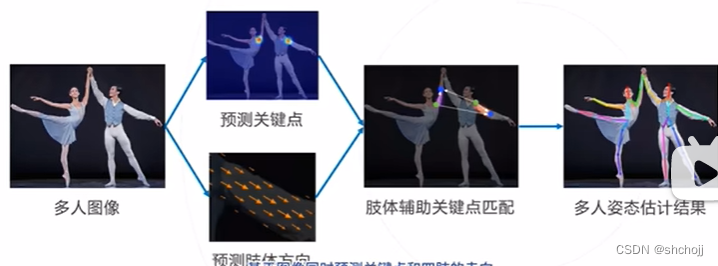
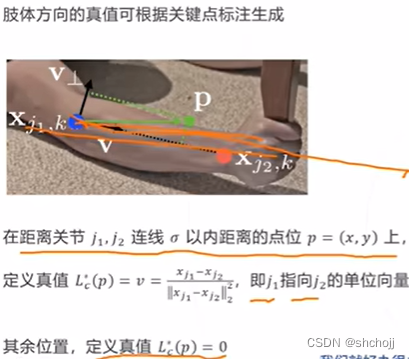
关键点与肢体预测
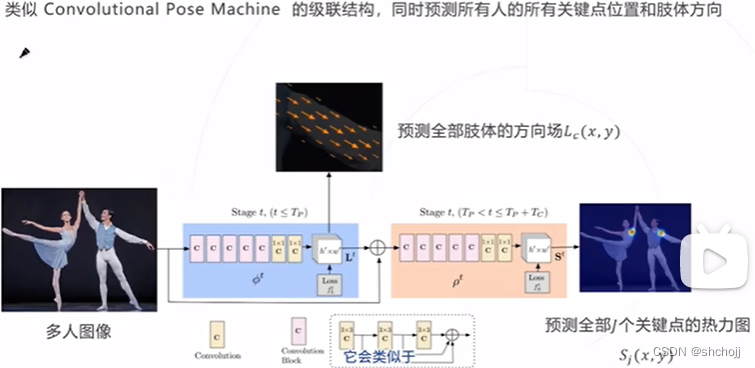
预测全部肢体的方向场,关键点和对应向量,下一个点也能得到。
肢体定义的关键点亲和度
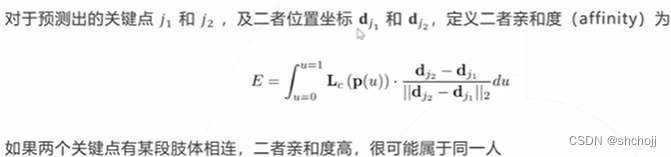
这里类似于不连续线段检测,如何将不连续的线段组合成一条长的连续线段。
基于亲和度匹配关键点
K部图???不是很懂,大意可能就是首先所有节点全连接,然后按照一定拓扑结合删掉某些链接

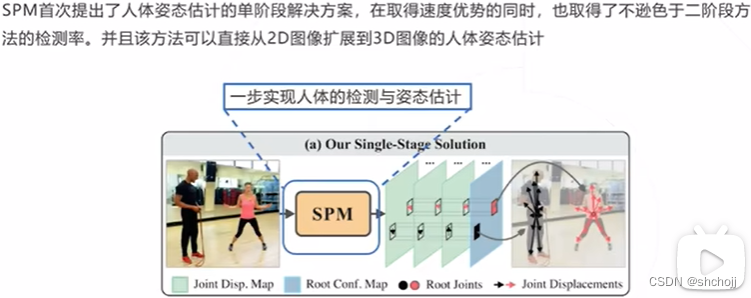
单阶段方法
SPM
structured pose representation(spr)
位置和不同的方向的回归
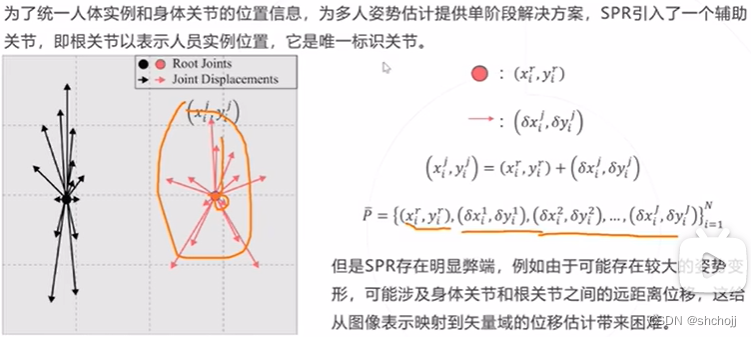
hierarchical SPR
降低由于形变带来的关节点距离差异变化导致的回归难度。
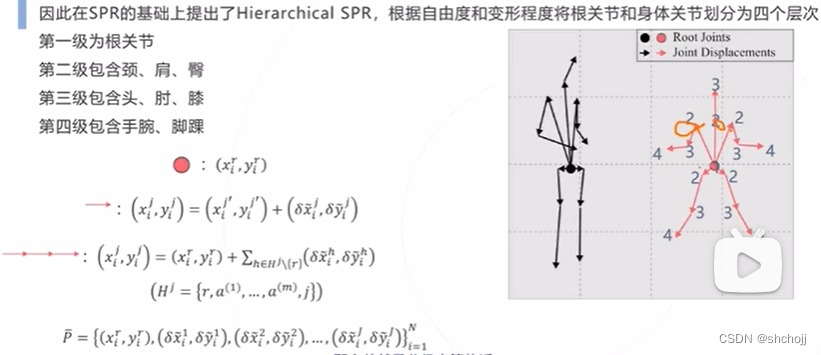
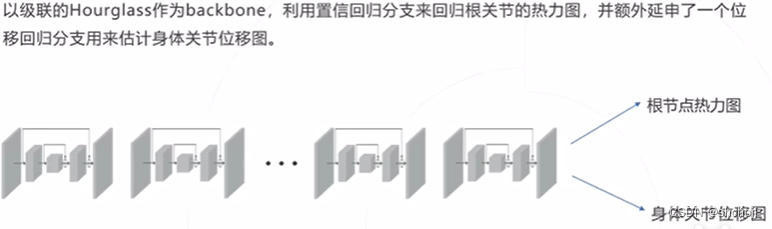
网络设计
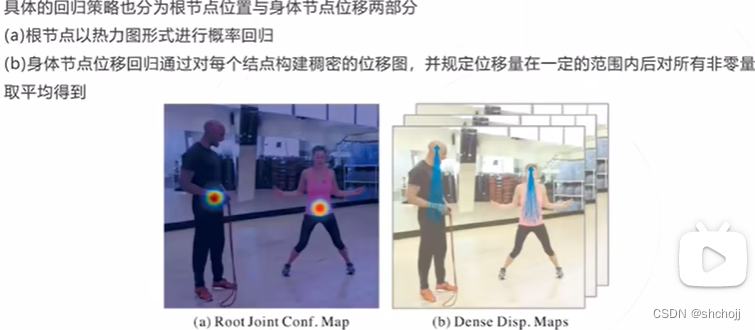
 回归策略
回归策略
根节点+稠密位移图
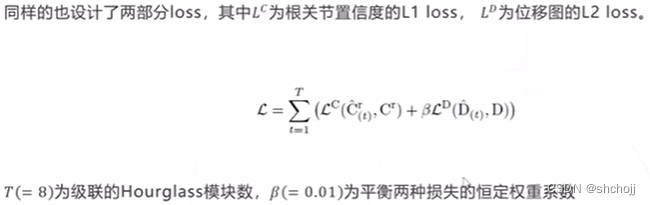
损失函数
基于transformer的方法
PRTR2021

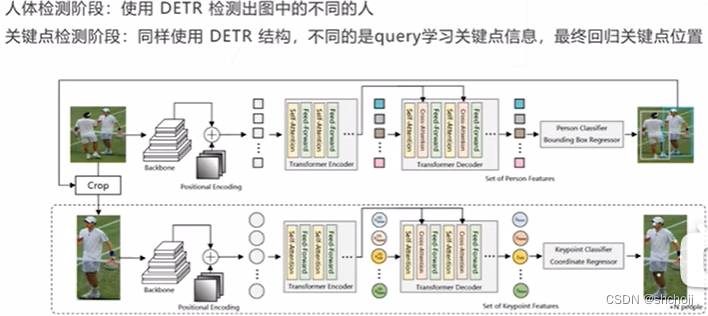
主要是全局信息吧
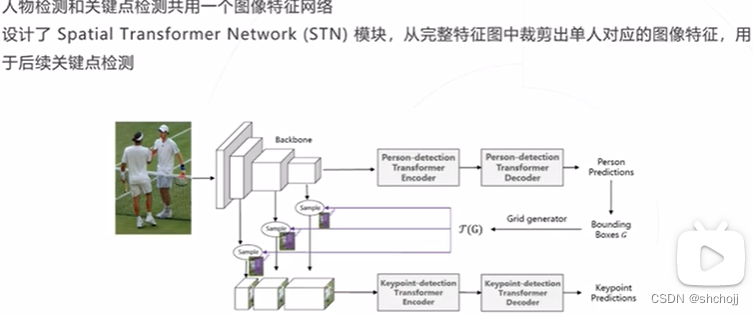
STN网络就很常见了,主要是应对多种变化的
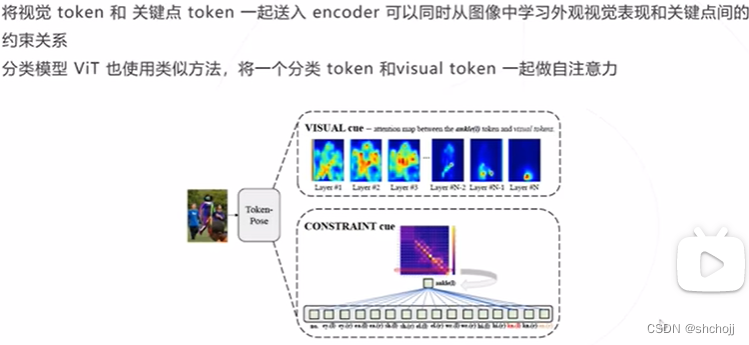
TokenPose(2021)

每个关键点是一个token???是把位置信息作为关键点,和token组合了?那预测呢
3D人体姿态估计
任务描述
 感觉原理上和2D是一样的,难度就是代码上。
感觉原理上和2D是一样的,难度就是代码上。
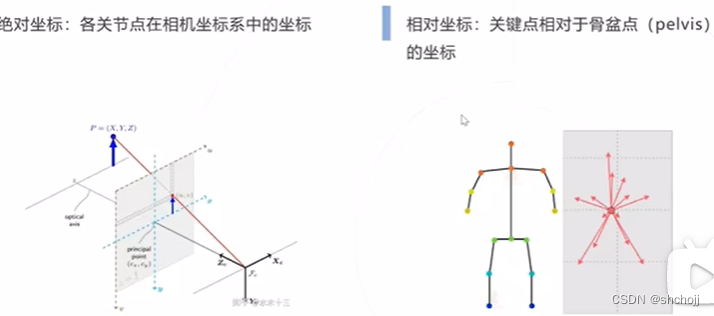
绝对坐标VS相对坐标
难点:从2D图像中回复3D信息
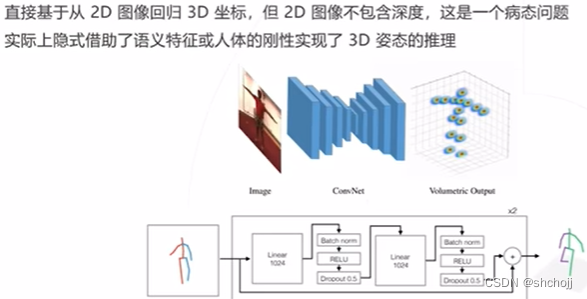
语义信息中包含刚性变换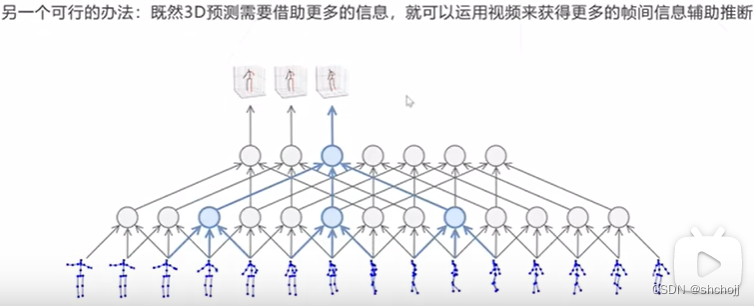
视频帧之间的变换
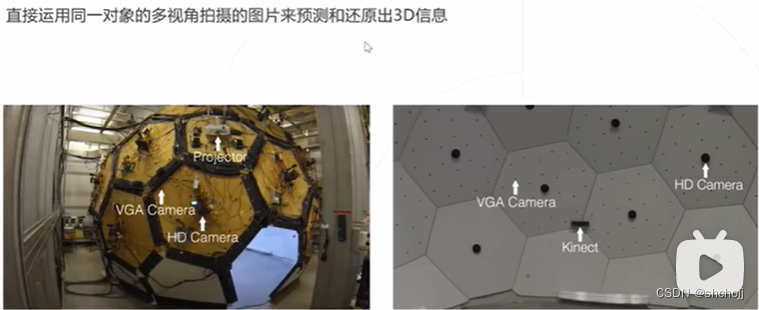
单张图片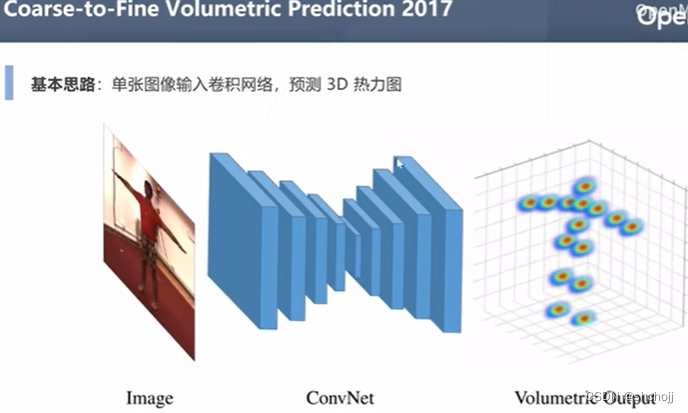
Coarse-to-fine
为每一个关节点预测一个64x64xd的3D热力图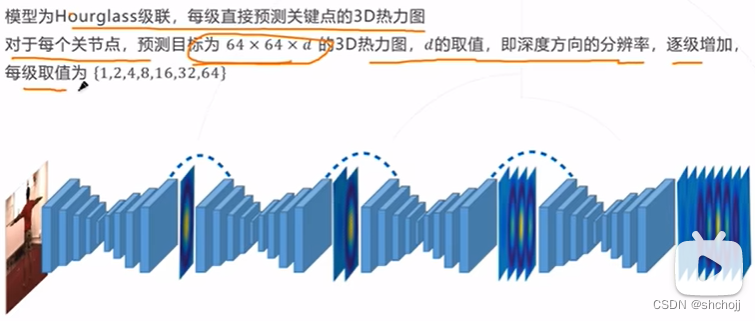
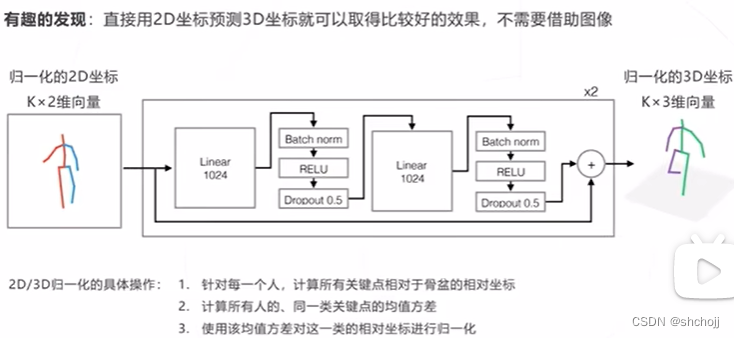
Simple Baseline 3D
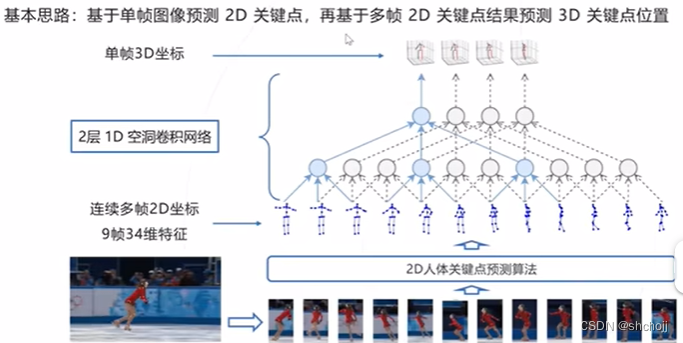
VideoPose3D
这个是不是就是利用时空信息
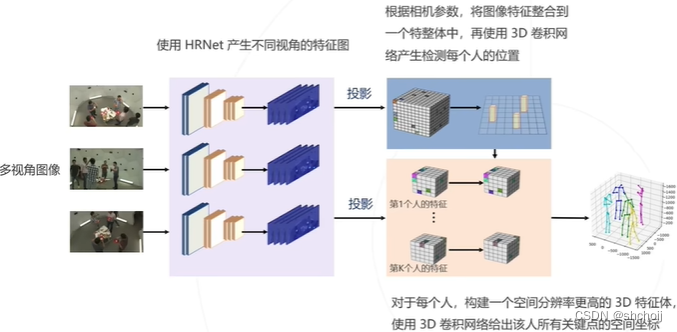
VoxelPose
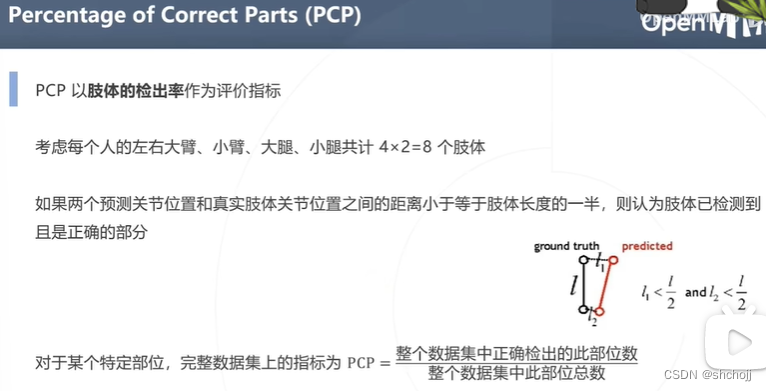
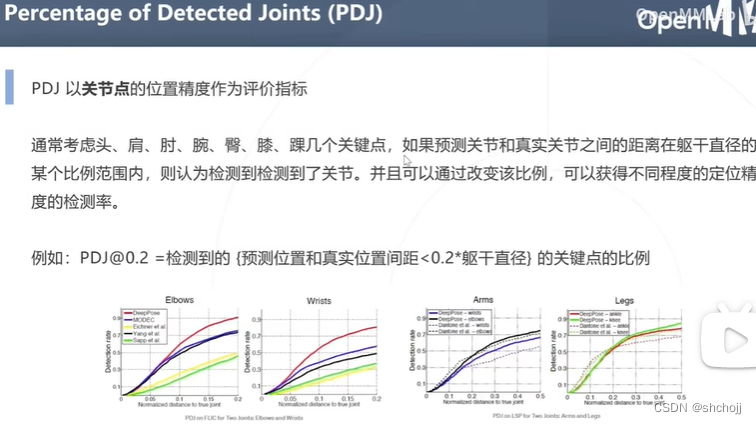
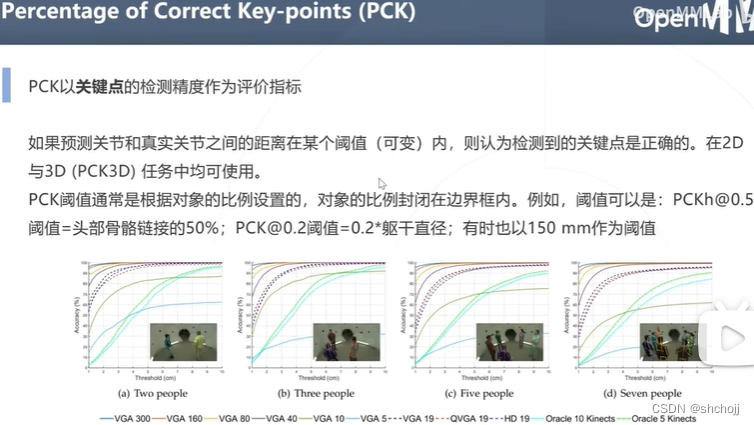
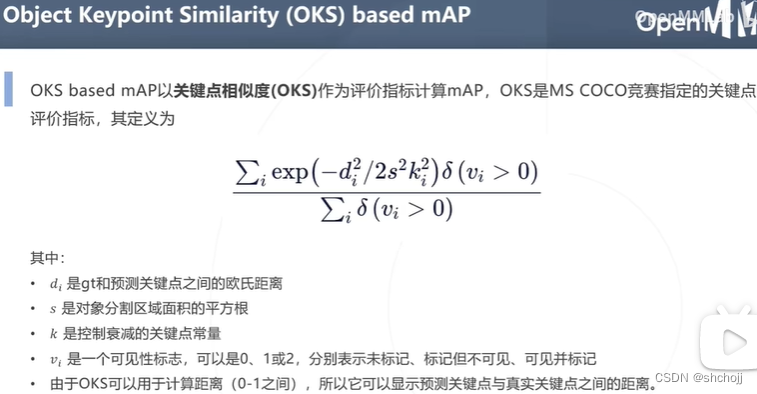
评估指标
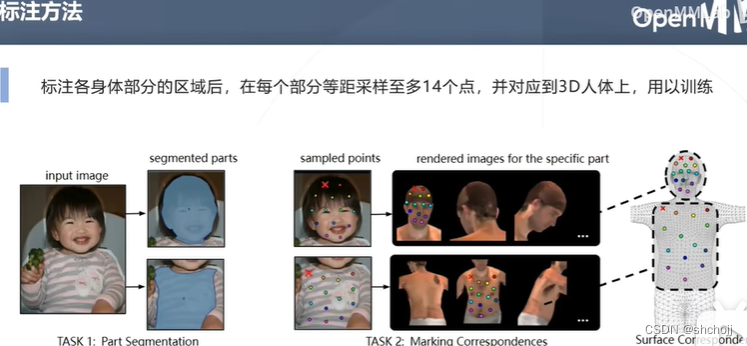
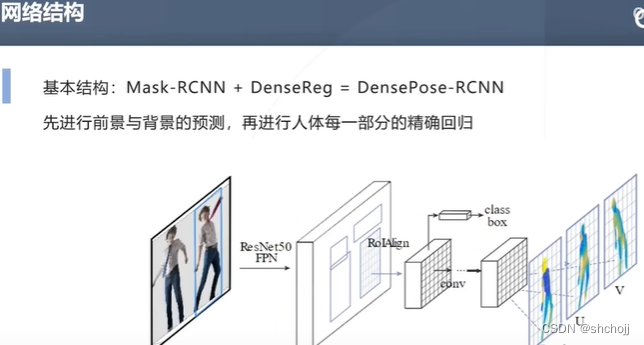
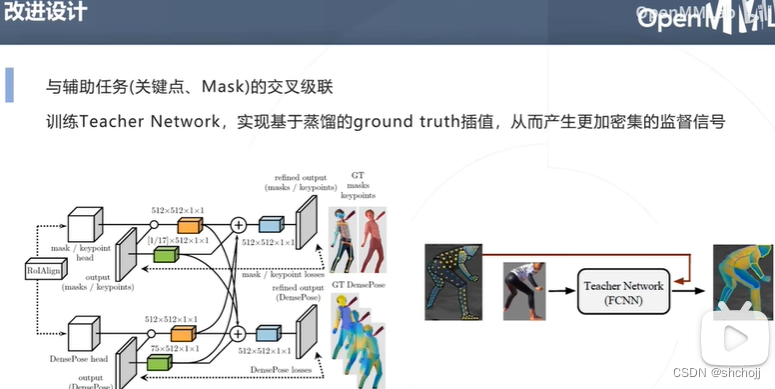
DensePose
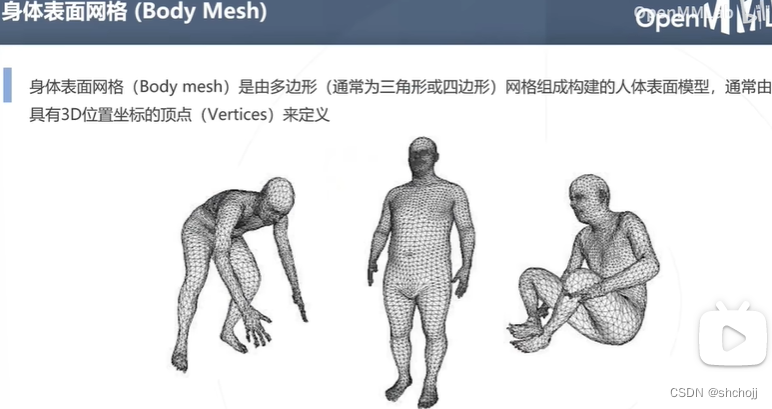
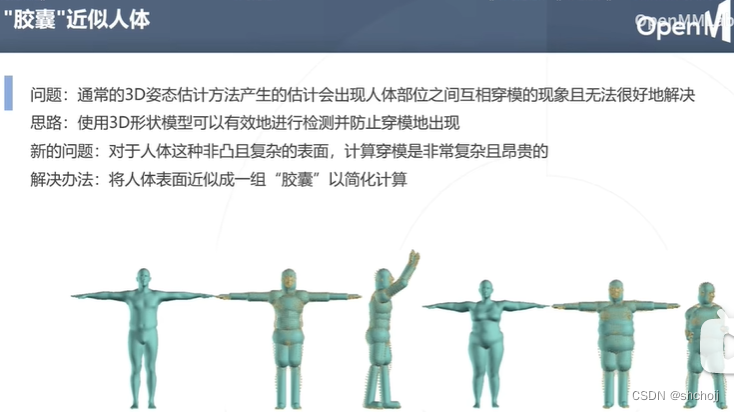
mesh