x
o
u
t
=
x
i
n
−
k
s
+
1
x_{out} = \frac{x_{in} - k}{s} + 1
xout=sxin−k+1
如果不考虑padding,卷积输出的feature map的计算公式如上,那么
x
i
n
=
(
x
o
u
t
−
1
)
∗
s
+
k
x_{in} = (x_{out} - 1) * s + k
xin=(xout−1)∗s+k。因此计算模型的感受野可以从最后一层往前推。下面举个例子说明:
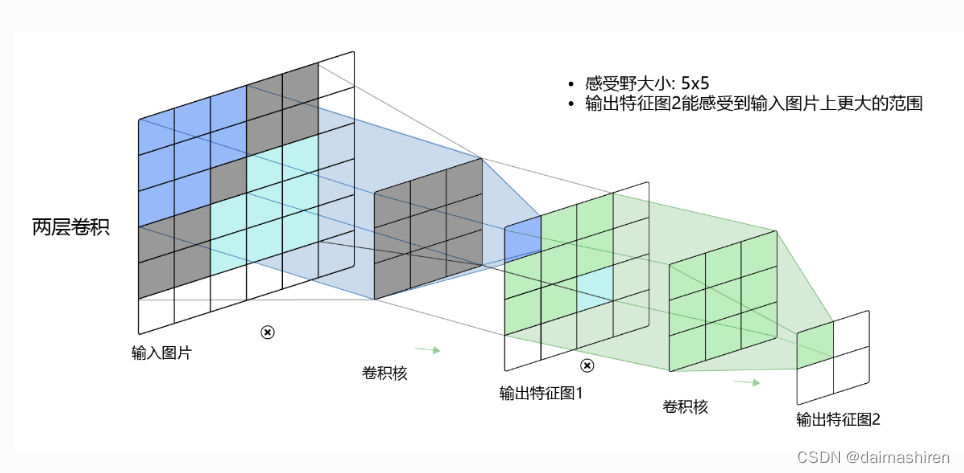
图片来自于https://paddlepedia.readthedocs.io/en/latest/tutorials/CNN/convolution_operator/Convolution.html
一个输入大小为6x6的图像经过两层大小为3x3的卷积核之后,输出特征图变为2x2。现在要计算输出的这个特征图上的每个点对应输入的6x6的图像上多大范围的像素点(感受野)。很直观的,输出的2x2图像上每个点来自于中间特征图的3x3区域。即:
x
i
n
=
(
x
o
u
t
−
1
)
∗
s
−
k
=
(
2
−
1
)
×
1
+
3
=
3
x_{in} = (x_{out} - 1)*s - k = (2 - 1)\times 1 + 3 = 3
xin=(xout−1)∗s−k=(2−1)×1+3=3
那么中间的特征图上点影响多大范围的来自第一个特征图像素点?类似的过程代入以上公式:
x
i
n
=
(
x
o
u
t
−
1
)
∗
s
+
k
=
(
3
−
1
)
∗
1
+
3
=
5
x_{in} = (x_{out} - 1) * s + k = (3 - 1) * 1 + 3 = 5
xin=(xout−1)∗s+k=(3−1)∗1+3=5
因此我们得到输出的2x2的特征图上的点对应于原始特征图上5x5范围的像素点,即感受野为5x5。池化层的感受的计算同上。如果是遇到空洞卷积的感受野计算,可以先把空洞卷积转换成等效的卷积核 (参考: 直观理解Dilated Convolution)
空洞卷积的等效卷积核大小为
k
′
=
k
+
(
k
−
1
)
(
d
−
1
)
=
d
(
k
−
1
)
+
1
k' = k + (k-1)(d-1) = d(k-1)+1
k′=k+(k−1)(d−1)=d(k−1)+1,其中d为膨胀率。换成等效卷积核后再套用以上方法计算感受野即可。
通俗理解CNN感受野的计算方法
news2026/2/7 22:49:27
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/485992.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
springbooot使用google验证码
springbooot使用google验证码 1、使用场景2、springboot使用google验证码1、引入依赖2、编写配置类3、编写控制层4、前端实现 1、使用场景
由于需要做一个前后端分离的项目,想着使用google验证码,由于年龄大了,这些知识啊,用完就…

防伪标志使用的全息薄膜,竟可合成大自然的“结构色”
大自然为生物赋予了各种各样的色彩,除了常见的赤橙黄绿青蓝紫外,还有反光效果很好的金属色等等。有趣的是,一些生物身上的颜色也能像金属那样闪闪发光,在不同光线下颜色甚至还会有变化。实际上,大自然很多色彩由色素产…
全注解下的SpringIoc 续6-多环境配置
我们都知道,在企业开发过程中,一个项目往往都会有开发、测试、仿真、生产等环境配置,除了使用配置中心(比如Apollo等)之外,Spring Boot也提供了不同环境之间切换的机制,下面让我们来一起看看。 …
Docker安全最佳实践
目录 1、探测容器开放端口和服务漏洞
2、宿主机、网络、镜像、DockerApi安全
3、更新Docker、日志、事件
4、Docker安全测试
5、Docker安全最佳实践 1、探测容器开放端口和服务漏洞
使用Nmap扫描Docker容器中的开放端口
使用docker ps命令获取正在运行的容器ID或名称。在…
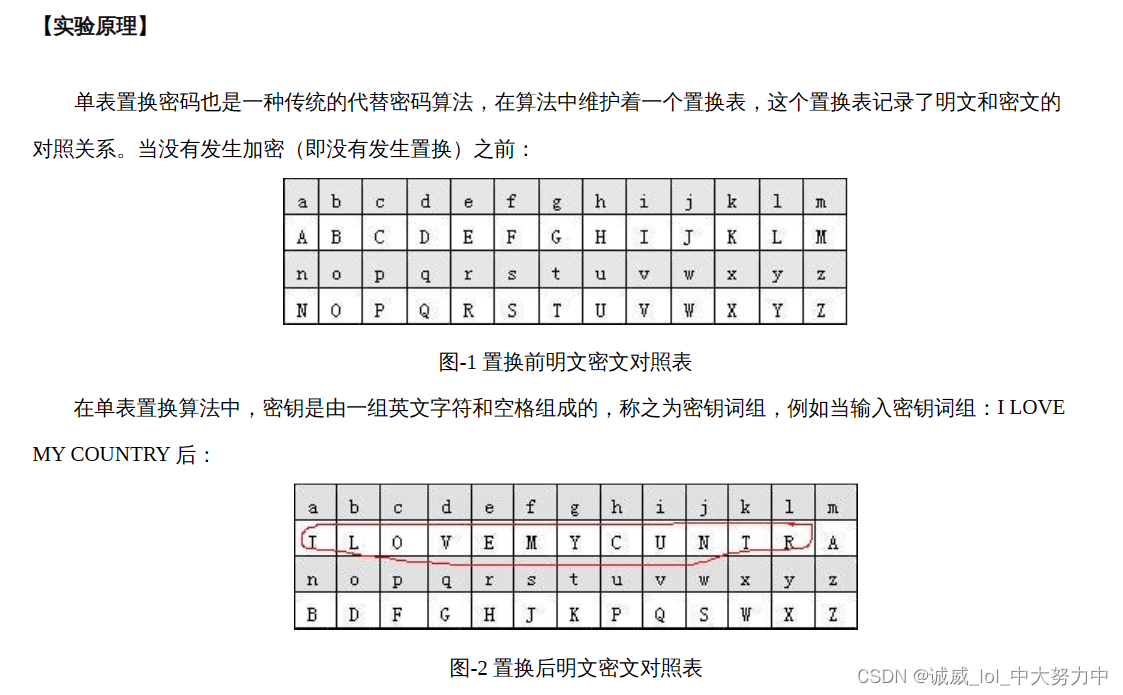
密码学作业——置换密码部分
part1: encrypt加密函数_代码补充:
/*请在此处添加*/cout<<Substition[plain[i]];
part2:Decrypt解密函数_代码补充:
/*请在此处添加代码*/
cout<<ReverseTable[cipher[i]];part3:设置 转换表Substition[]部分:
// 将i对应的置换表元素设为s1中对应…
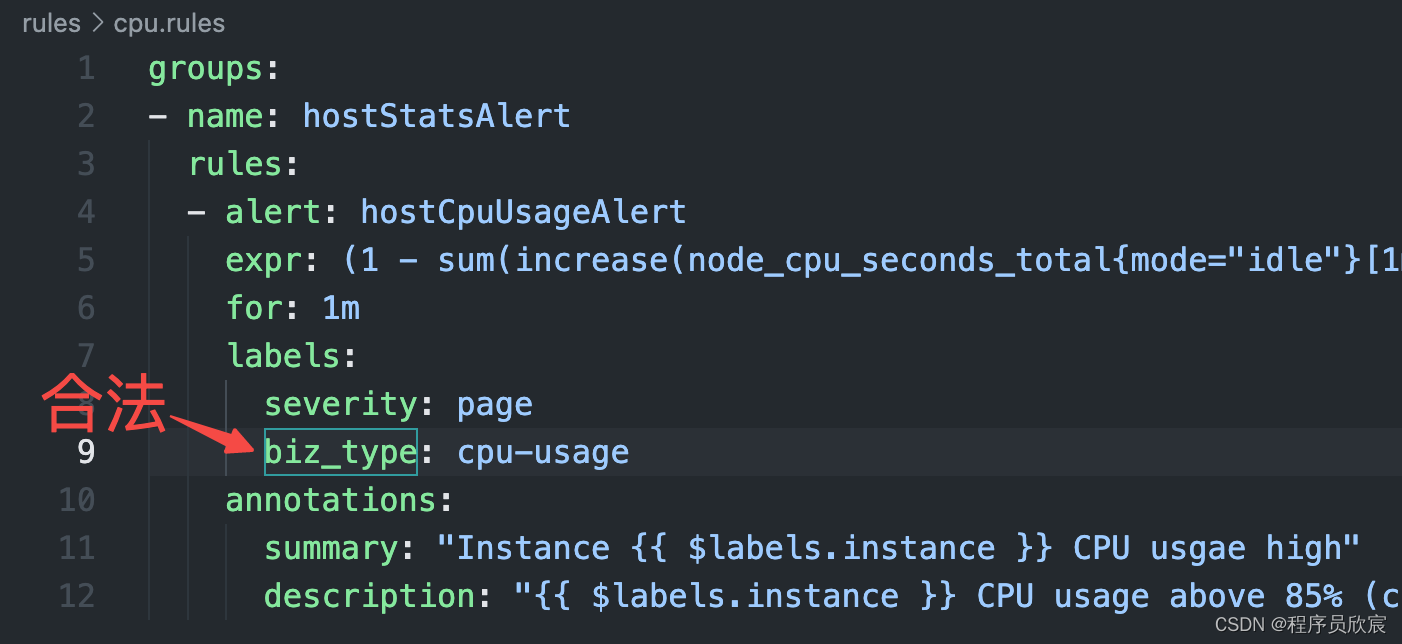
prometheus实战之三:告警规则
欢迎访问我的GitHub 这里分类和汇总了欣宸的全部原创(含配套源码):https://github.com/zq2599/blog_demos 本篇概览
本文是《prometheus实战》系列的第三篇,一起来学习prometheus的告警功能,如下图所示,整个告警功能分为规则和通…

Python使用AI animegan2-pytorch制作属于你的漫画头像/风景图片
Python使用AI animegan2-pytorch制作属于你的漫画头像 1. 效果图2. 原理3. 源码参考 git clone https://github.com/bryandlee/animegan2-pytorch
cd ./animegan2-pytorch
python test.py --photo_path images/photo_test.jpg --save_path images/animegan2_result.png1. 效果图…
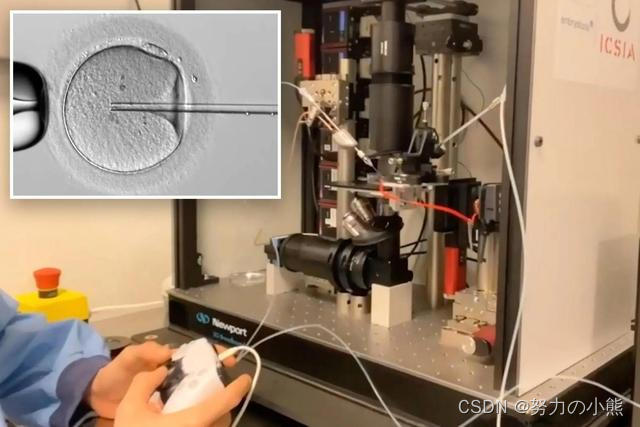
全球首个机器人辅助试管婴儿降生
近日,两名通过机器人辅助受精手术成功诞生的女婴成为全球瞩目的焦点。这是全球首批由机器人成功辅助受精的婴儿案例,预示着未来生育技术的发展趋势。 以往,试管婴儿受精过程中将精子注入卵子内的环节都是由人工完成。胚胎技术人员需要在显微镜…

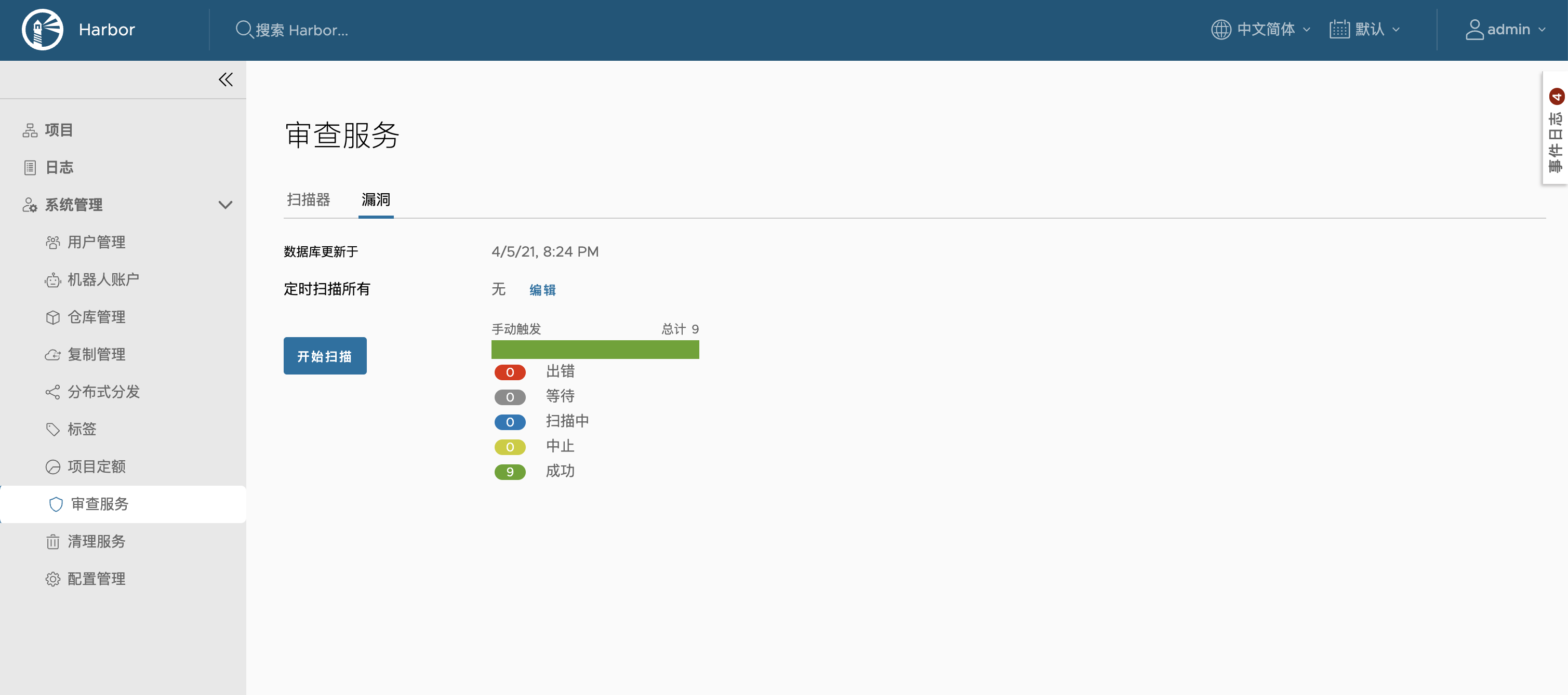
6. Docker——详说镜像
本章讲解知识点 Docker 镜像 Union File System(联合文件系统)技术 回说 Docker 镜像分层 Docker 镜像分层原理 1. Docker 镜像
镜像是一种轻量级、可执行的独立软件包,用来打包软件运行环境和基于运行环境开发的软件,它包含…

一文了解 Zebec Labs 投资的 Coral Finance,空投计划或在不久推出
在前不久,Zebec Labs 宣布对链上衍生品协议 Coral Finance 进行150万美元的投资,以帮助该协议完成早期启动并,并在后续持续的为其提供孵化支持。Coral Finance 将在不久部署在 Nautilus Chain 主网上。据了解,Coral Finance 是 Na…
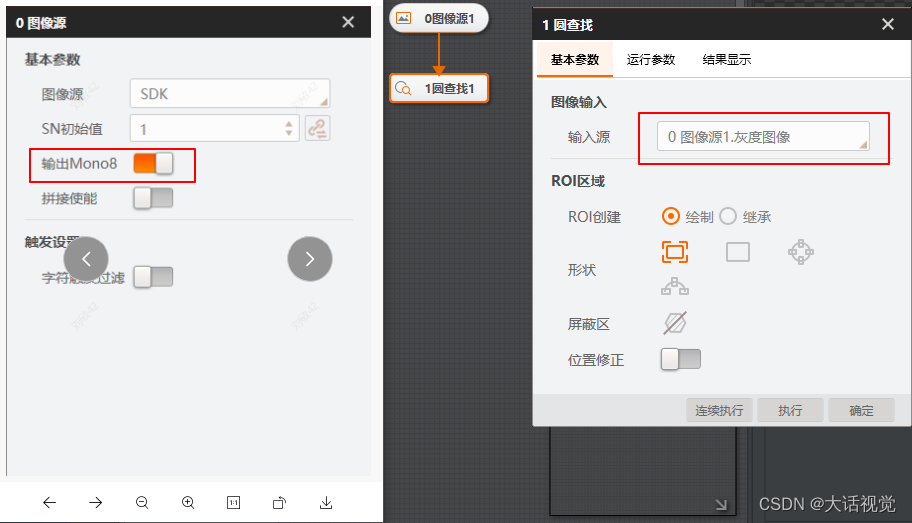
【VM服务管家】VM4.2平台SDK_6.2 模块操作类
目录 2.2.1 流程操作:通过流程或Group设置输入输出图像的方法2.2.2 模块操作:设置输入图像、参数和ROI2.2.3 N点标定:清空标定点、生成标定文件2.2.4 分支字符:控制调试模式开关的方法2.2.5 条件检测:条件检测模块设置…
【GAMES101】02 Review Of Linear Algebra
1.点乘: 向量点乘 → 一个数值 点乘在图形学中的应用:
找到两个方向之间的夹角。找到一个向量投影到另一个向量上是什么样的。计算两个向量的方向(是接近还是远离)判定高光范围,从1(重合ÿ…

【VM服务管家】VM4.2平台SDK_6.5 全局类
目录 2.5.1 全局相机:获取全局相机列表和设置相机参数的方法 2.5.1 全局相机:获取全局相机列表和设置相机参数的方法
描述 环境:VM4.2 VS2013及以上 问题:问题1:如何获取方案中所有的全局相机的连接状态,…
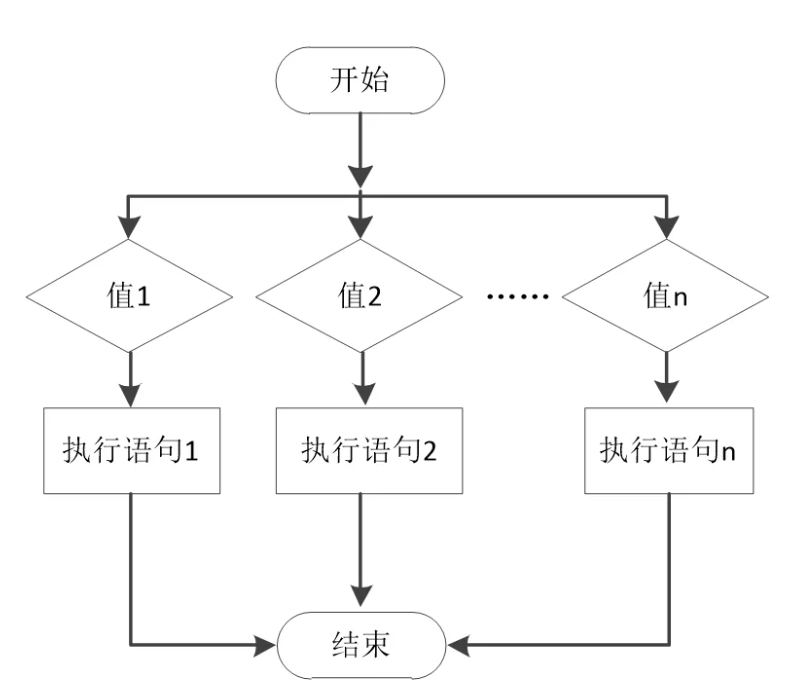
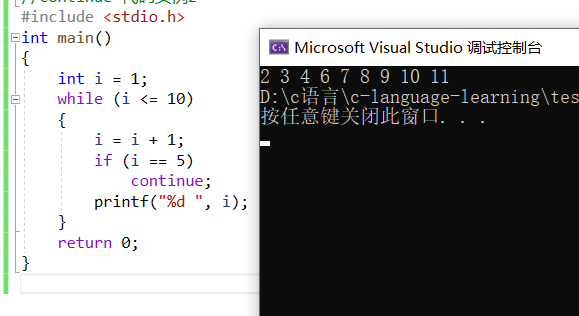
c++基础-分支语句
目录 if语句
if-else
switch语句 if语句
在C中,if语句是一种分支结构,它允许程序根据条件执行不同的操作。可以使用if语句来检查一个条件是否为真,如果为真就执行一个语句块,否则执行另一个语句块。 if语句的语法如下ÿ…

自媒体平台图文创作建议和技巧
自媒体博主在自媒体平台进行图文创作时,需要注意哪些方面才能创造出更好的内容获得更多的关注呢?今天跟大家分享自媒体创作中的一些图文创作建议和技巧。 一、确定目标受众
首先需要明确自己要传达的信息和目标受众。要考虑读者的兴趣、需求和阅读习惯&…
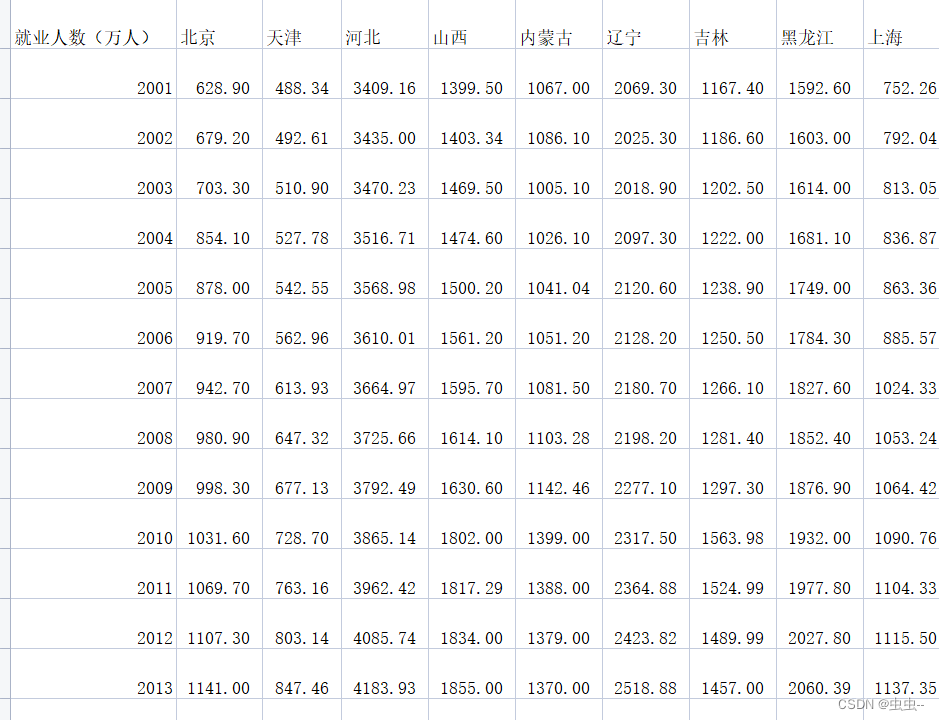
2001-2021年全国30省就业人数数据
2001-2021年全国30省就业人数数据/各省就业人数数据
1、时间:2001-2021年
2、范围:包括30个省市不含西藏
3、指标:就业人数
4、来源:各省NJ、社会统计NJ
5、缺失情况说明:无缺失
6、指标说明:
就业人…

【Python入门】人生苦短,我用Python
前言 📕作者简介:热爱跑步的恒川,致力于C/C、Java、Python等多编程语言,热爱跑步,喜爱音乐的一位博主。 📗本文收录于Python零基础入门系列,本专栏主要内容为Python基础语法、判断、循环语句、函…

10万字城市大脑一网统管分析平台及大数据平台建设方案(WORD)
本资料来源公开网络,仅供个人学习,请勿商用,如有侵权请联系删除。
一.1.1.督查监管子系统
督察监管子系统是指通过独立的督察队伍,以日常督察、专项督察的方式,来检查运行效果。根据工作进度,工作中存在的…
【无人车】无人驾驶地面车辆避障研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…