- 功能说明
目前车辆上ECU的数目越来越多,不同功能的ECU对电源有不同的要求,在点火钥匙打到OFF档(KL15停止供电)之后,有的ECU(如座椅模块)允许直接断电,有的ECU(如空调模块)需要延时断电,有的ECU(如防盗模块)需要一直带电。
需要延时断电或一直断电的节点为KL30供电的节点。KL30供电的节点在OFF档之后能进入低功耗状态,关闭大部分不需要的功能(如禁止CAN通信功能),尽可能减少电量消耗, 避免蓄电池电量消耗过多导致汽车无法启动。同时这些节点在低功耗状态下需要监控唤醒条件,如KL15信号,或CAN总线的状态等。一旦KL15开始供电,或总线上有报文(或者需要的报文,需要使用特殊的带滤波功能的收发器)等,节点应能被唤醒,进入正常工作模式。
由此可见,要实现车辆中各ECU的低功耗管理,需要实现ECU上各CAN 网络的网络管理,即对于某个CAN网络,连接到该总线上的各节点需要协同工作,遵循同样的协议以实现同步睡眠(否则进入睡眠模式的节点会被暂未睡眠节点发出的报文唤醒)。
AUTOSAR CAN Network Management(以下简称AUTOSAR CAN NM)是目前被广泛使用的一种基于协同睡眠的网络管理协议。其主要功能点如下:
- CAN NM报文的发送(包括发送请求的方式,发送确认和发送错误处理)及接收。
- 协同睡眠。各节点自身均满足休眠条件(Network Released),且总线上无任何网络管理报文,在等待一定时间后,所有节点协同进入睡眠状态。
- Bus Load Reduction Mechanism。采用普通的NM报文发送方式,总线上的负载会随着网络上节点总数的增加而增加。为了降低总线上的负载,设计了一套Bus Load Reduction Mechanism。
- 策略方案详细介绍
本方案基于AUTOSAR Specification of CAN Network Management(V3.3.0, R4.0 Rev 3)。更多细节及参数说明请参考上述文档。
-
- 状态简介及状态转换说明
AUTOSAR CanNM包含3个operational mode:
- Network Mode
其中Network Mode中包含3个子状态,如下:
- Repeat Message State
- Normal Operation State
- Ready Sleep State
- Prepare Bus-Sleep Mode
- Bus-Sleep Mode
-
- 相关(子)状态的目的如下:
-
| (子)状态 | 主要目的 |
| Repeat Message State | 节点上线监测。 |
| Normal Operation State | 保证只要任何节点对网络有需求(network is requested),就可以保持整个网络处于awake状态。 |
| Ready Sleep State | 当某个节点X想要转化到Prepare Bus-Sleep Mode时,只要网络中的任一其他节点想要保持网络awake, 节点X只能继续在Ready Sleep State下等待。也就是说,只有网络中的所有节点对网络都没有需求时,节点X才可以从Ready Sleep State转化到Prepare Bus-Sleep Mode。 |
| Prepare Bus-Sleep Mode | 保障网络上的所有节点有足够的时间停止网络的活性,在Prepare Bus-Sleep Mode下,网络的活性在逐步下降(例如存在队列发送的情况下逐步清空所有的Tx-buffer),最终完全停止网络活性。 |
| Bus-Sleep Mode | 当某个节点没有消息需要交互时,进入Bus-Sleep Mode,以减少电源消耗,通信控制器转换到sleep模式,相应的wakeup机制被激活,最终电源消耗会减少到一个适当的水平。 |
-
-
- 状态转换的说明如下:
-
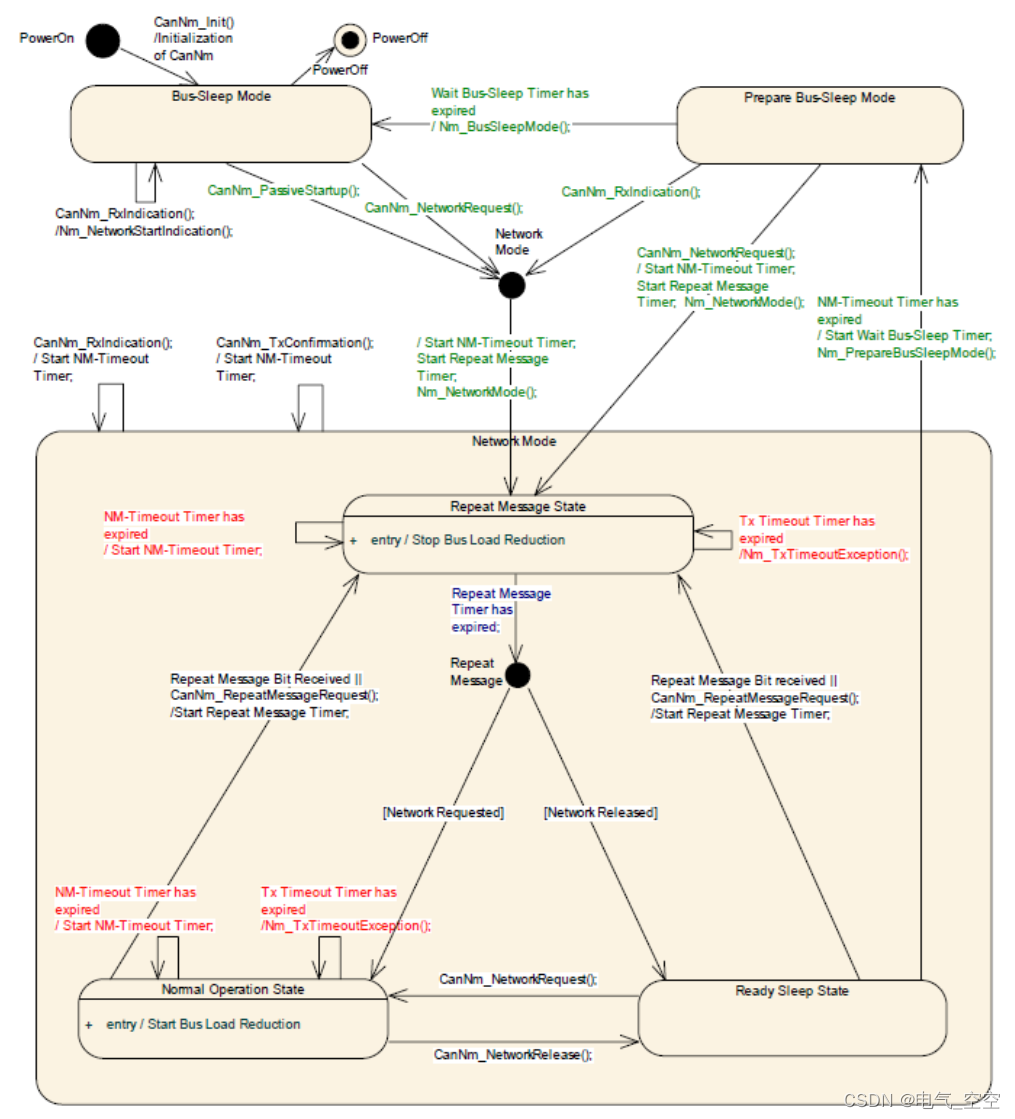
上图中,状态改变相关的转化用绿色标注,错误处理相关的转化用红色标注,节点监测(可选功能)相关的转化用蓝色标注,在此状态转换图中,假设已使能bus load reduction 功能。
下图是一个拥有3个节点的网络中,各节点从power-on 到bus sleep 的示例说明。
正在上传…重新上传取消
其中TRMT代表配置参数CanNmRepeatMessageTime {CANNM_REPEAT_MESSAGE_TIME}
TTO代表配置参数CanNmTimeoutTime {CANNM_TIMEOUT_TIME}
TWBS代表配置参数CanNmWaitBusSleepTime {CANNM_WAIT_BUS_SLEEP_TIME}
-
- 通信机制
- 发送机制
- 发送请求的方式
- 发送机制
- 通信机制
各种配置和状态下发送请求方式的说明如下:
正在上传…重新上传取消
-
-
-
- 发送确认
-
-
正在上传…重新上传取消
-
-
-
- 发送错误处理
-
-
CANNM_PASSIVE_MODE_ENABLED=TRUE或CANNM_IMMEDIATE_TXCONF_ENABLED= TRUE时CanNm 模块不使能发送错误处理。
当请求发送一个NM 报文时,NM Message Tx Timeout Timer会开始计时,超时值设置为CANNM_MSG_TIMEOUT_TIME。
当CanNm_TxConfirmation被CanIf调用时,NM Message Tx Timeout Timer会被停止清零。
当NM Message Tx Timeout Timer发生超时时,CanNm可以调用Nm_TxTimeoutException函数(可选)。
-
-
- 接收机制
-
当一个NM报文被成功接收,CanIf模块会调用回调函数CanNm_RxIndication。在该回调函数中,CAN NM会拷贝CanNm PDU相关的数据到内部buffer。
-
- Bus Load Reduction Mechanism
NM PDU的发送周期通常由时间参数CANNM_MSG_CYCLE_TIME来决定。对于属于一个网络的所有节点,该参数均相等。这样会导致总线上的负载会随着网络上节点总数的增加而增加。为了降低总线上的负载,可以采用Bus Load Reduction Mechanism。该机制如下:
如果成功发送NM PDU,发送周期定时器重新设置为CANNM_MSG_CYCLE_TIME。
如果成功接收NM PDU,发送周期定时器重新设置为节点特定的参数CANNM_MSG_REDUCED_TIME,此参数须在CANNM_MSG_CYCLE_TIME的0.5至1倍之间。
这会导致如下的结果:
整个网络上只有时间参数CANNM_MSG_REDUCED_TIME值最小的两个节点在轮流发送NM PDU,如果这两个节点A,B中有一个节点停止发送,则其余(且请求网络的)节点中CANNM_MSG_REDUCED_TIME值最小的那个节点C开始发送NM PDU,如果网络上只剩一个节点请求网络,则其NM PDU的发送周期为CANNM_MSG_CYCLE_TIME。
此机制保证了总线负载限制在每CANNM_MSG_CYCLE_TIME里最多两个NM报文。
正在上传…重新上传取消
-
- Network Management PDU 结构
正在上传…重新上传取消