目录
前言
1. 1/4悬架系统
1.1数学模型
1.2 H2/H∞求解反馈阵阵
1.3仿真分析
2. 1/2悬架系统
2.1数学模型
2.2 H2/H∞求解反馈阵阵
2.3仿真分析
3. 整车悬架系统
3.1数学模型
整车7自由度主动悬架数学模型
3.2 H2/H∞求解反馈阵阵
3.3仿真分析
4.总结
参考文献
前言
对于H2/H∞这种强鲁棒的控制器设计,其主要原理在于设定最小化的性能指标,然后利用H∞设定约束条件,这样保证在约束条件下最小化我们的性能指标,之前也有文章介绍了应用于2、4自由度的几种类型仿真分析,文章链接:
基于LMI的车辆主动悬架控制_lmi控制_Mr. 邹的博客-CSDN博客
基于MATLAB/Simulink的不确定性H2/H∞最优保性能LMI车辆主动悬架控制仿真分析_matlabh2优化控制_Mr. 邹的博客-CSDN博客
H2/H∞半车悬架控制仿真分析_Mr. 邹的博客-CSDN博客
现在我们将其应用到整车悬架,并且对之前的控制进行梳理。
1. 1/4悬架系统
1.1数学模型
![]()
![]()

这里不再做过多的介绍了,往期有一个合集文章介绍了:
半车(前后、左右)、整车悬架详细推导建模和simulink仿真分析_半车动力学模型_Mr. 邹的博客-CSDN博客
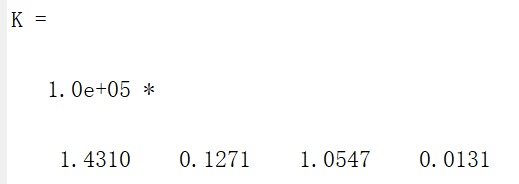
1.2 H2/H∞求解反馈阵阵
1.3仿真分析
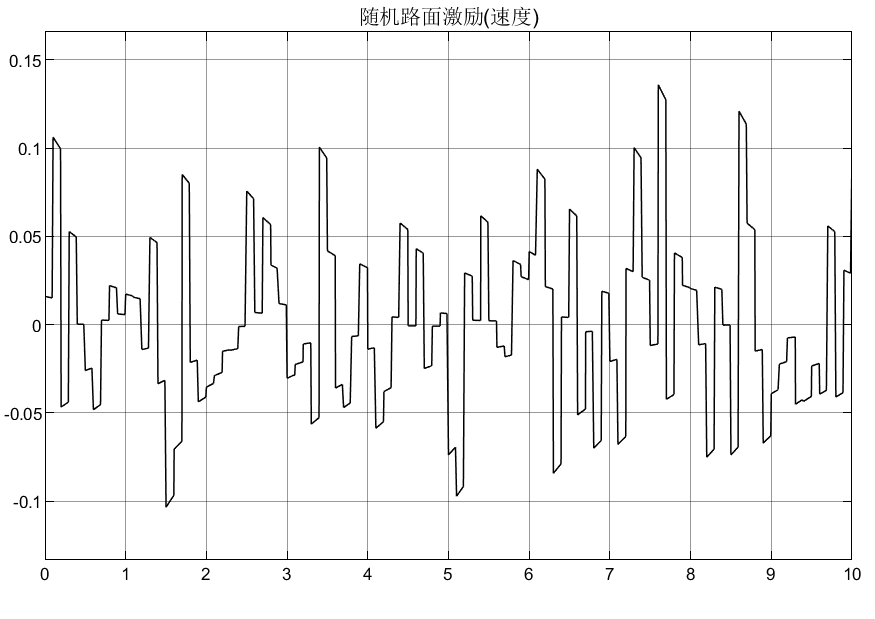
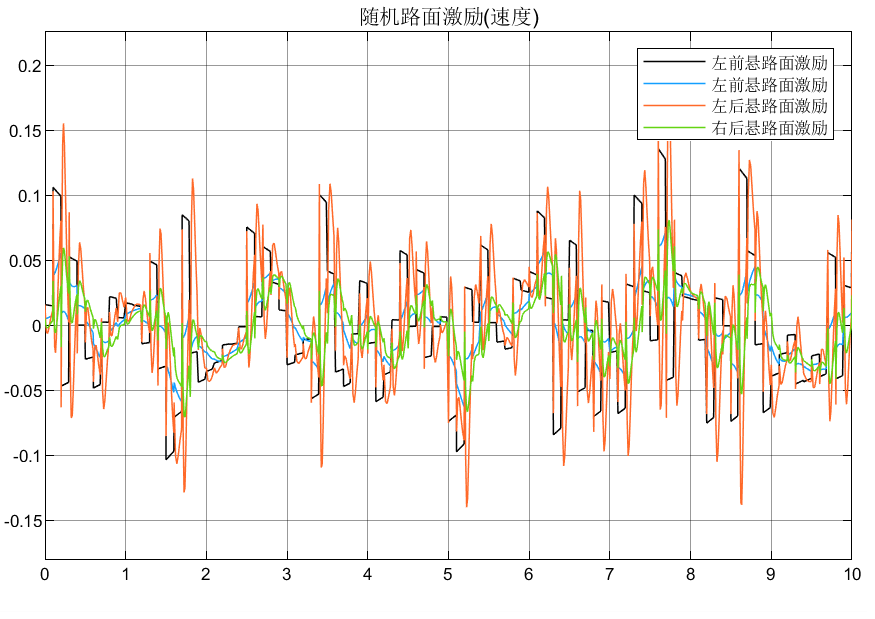
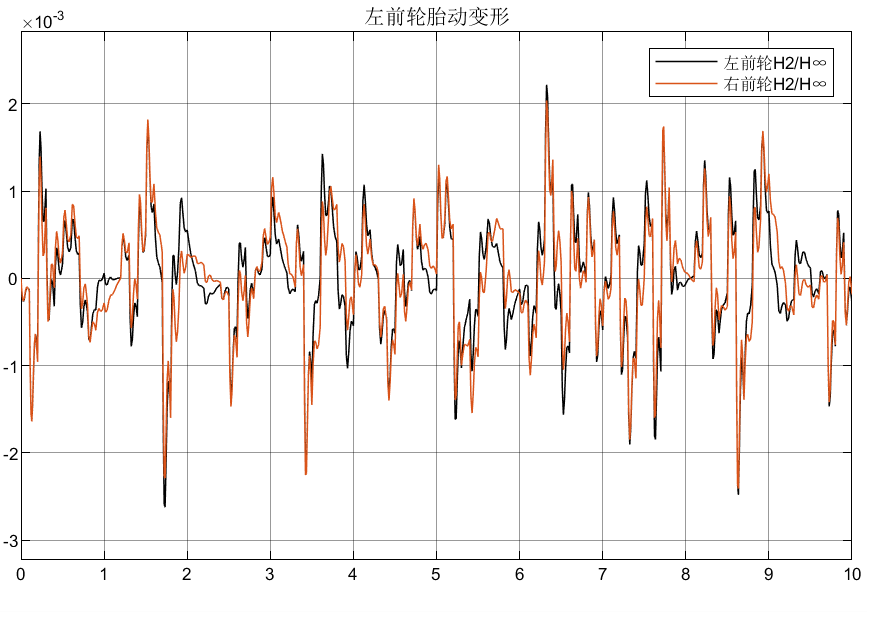
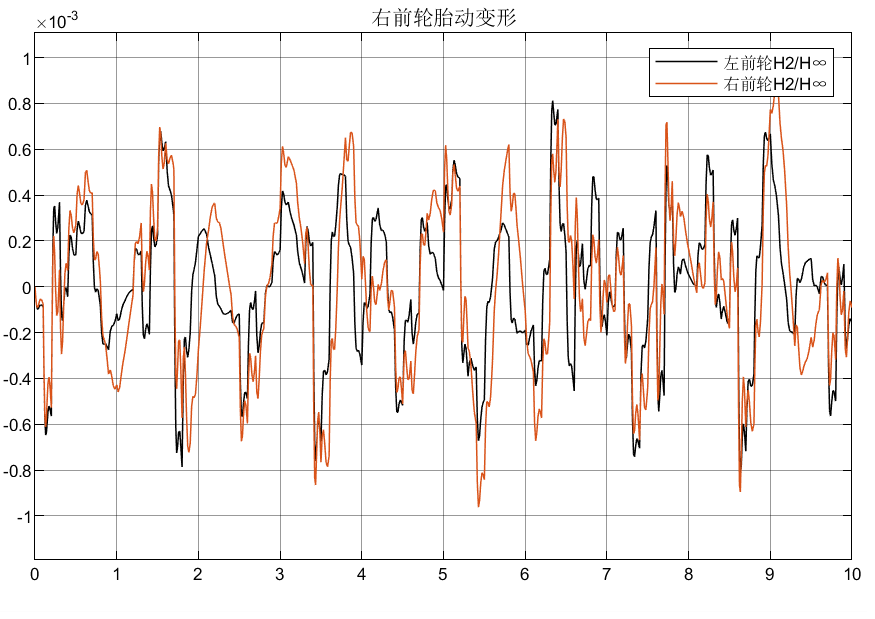
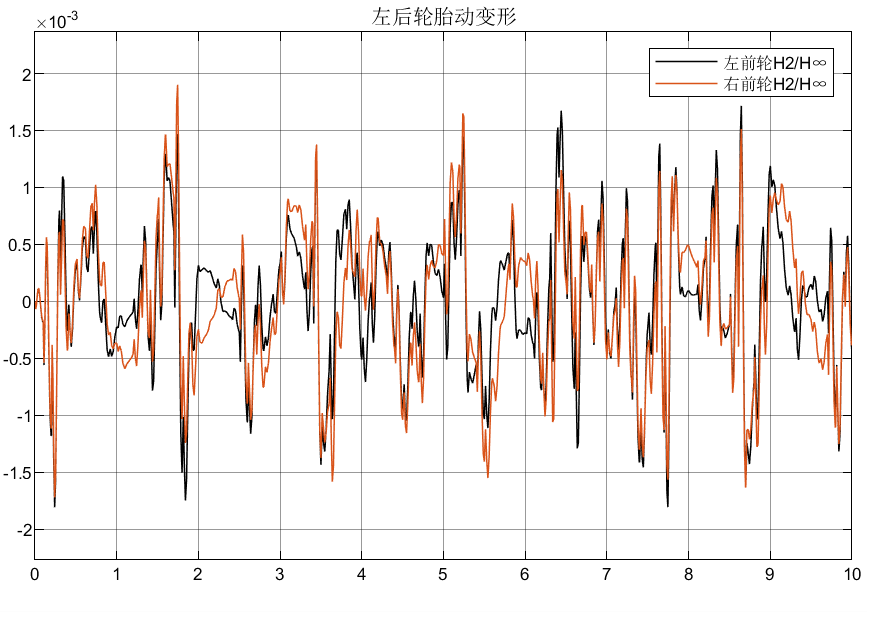
由于需要将轮胎动变形定义为约束指标,所以需要将路面激励整合到状态变量中,所以路面输入的是速度而不是位移,这个和LQR的原理相同
2. 1/2悬架系统
2.1数学模型

2.2 H2/H∞求解反馈阵阵
不带轴距预瞄:
带轴距预瞄:

2.3仿真分析
这里引入轴间预瞄和轴距预瞄进行优化:

3. 整车悬架系统
3.1数学模型
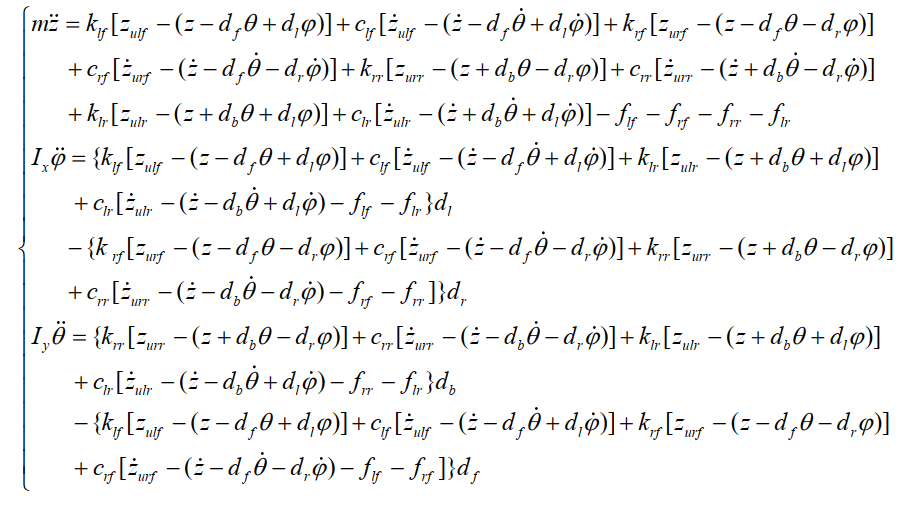
整车7自由度主动悬架数学模型

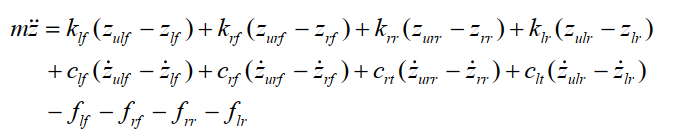
簧载垂向运动方程:
侧倾运动方程为:

俯仰运动方程为:

非簧载质量垂向运动方程为:

做出俯仰角θ和侧倾角φ很小的假设,所以有如下近似条件:
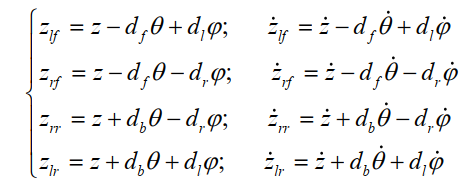
整理汇总得:

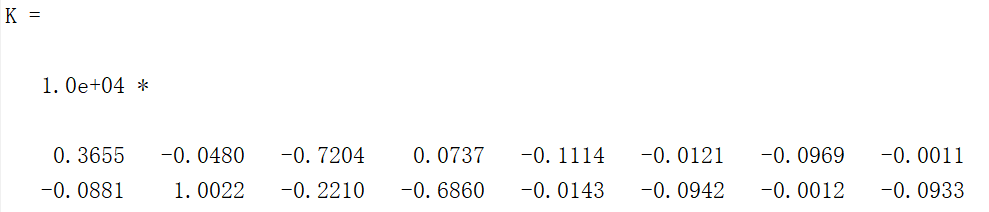
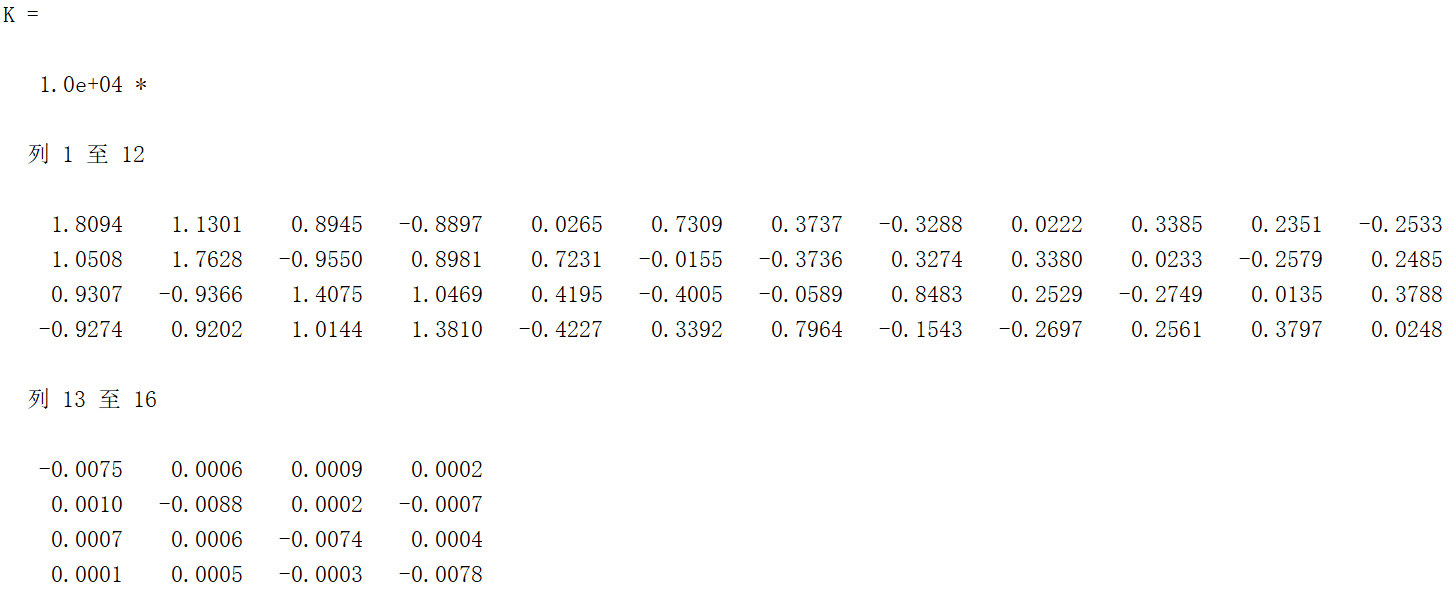
3.2 H2/H∞求解反馈阵阵
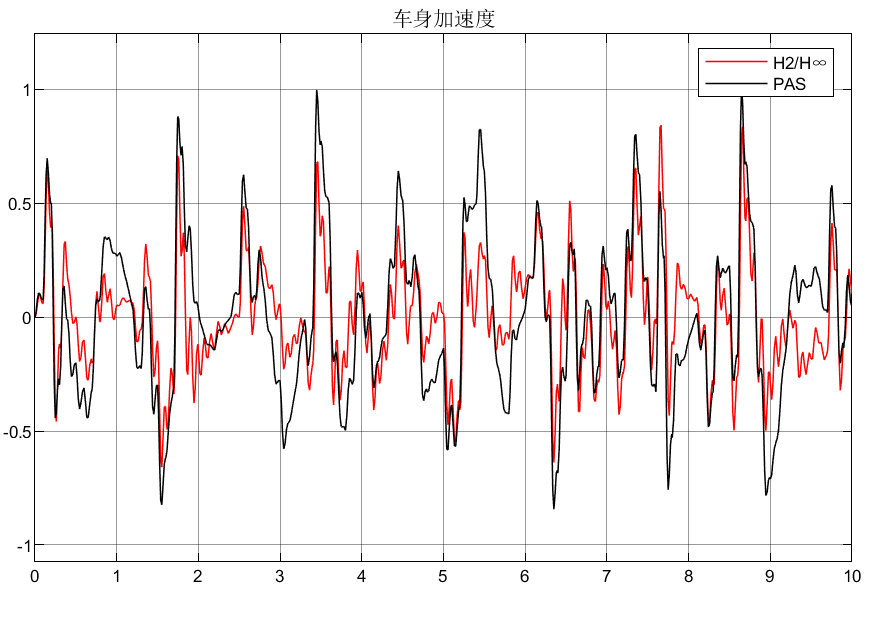
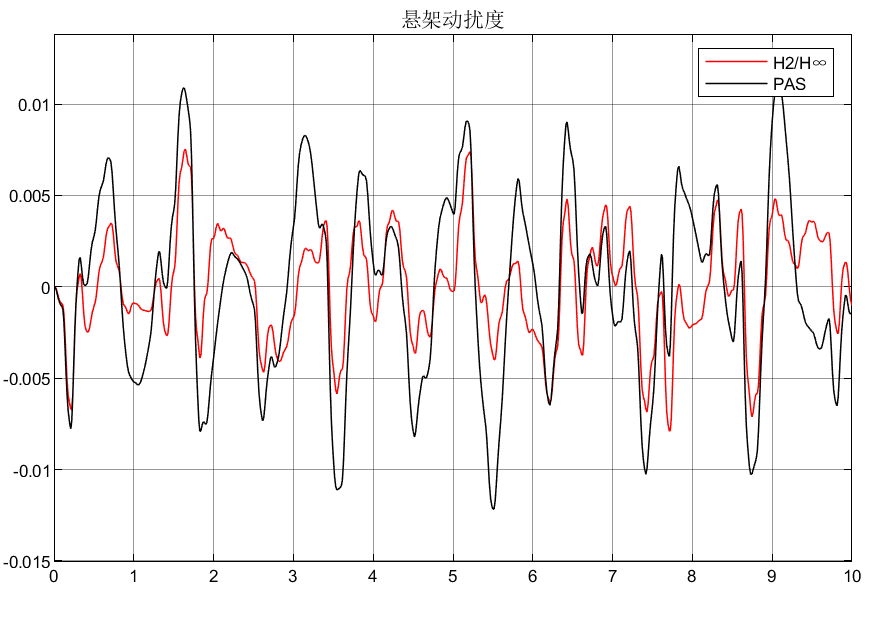
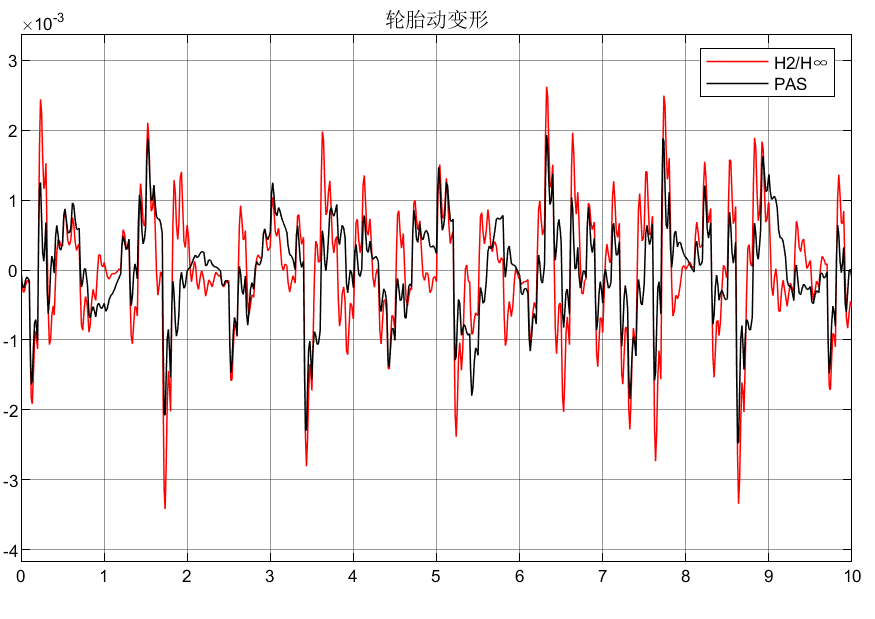
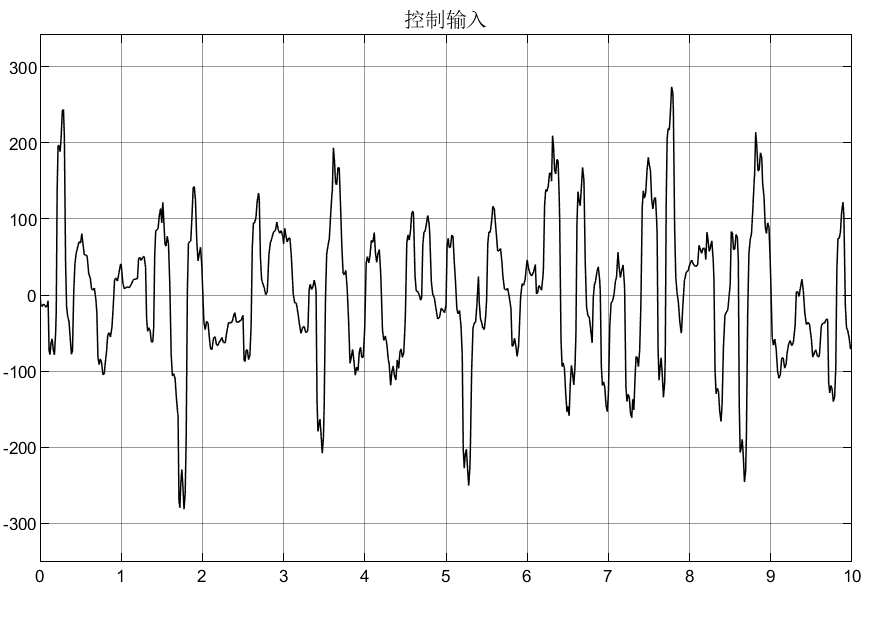
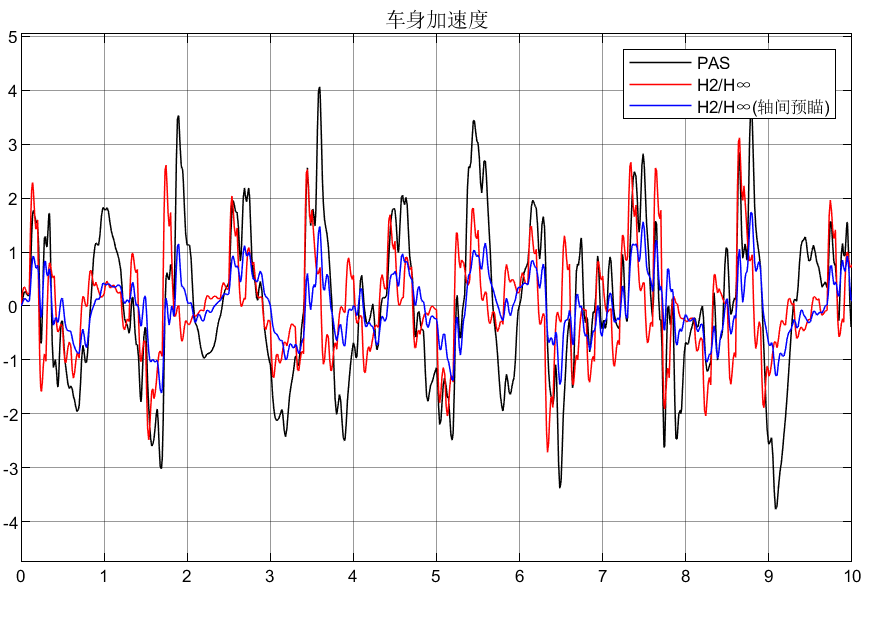
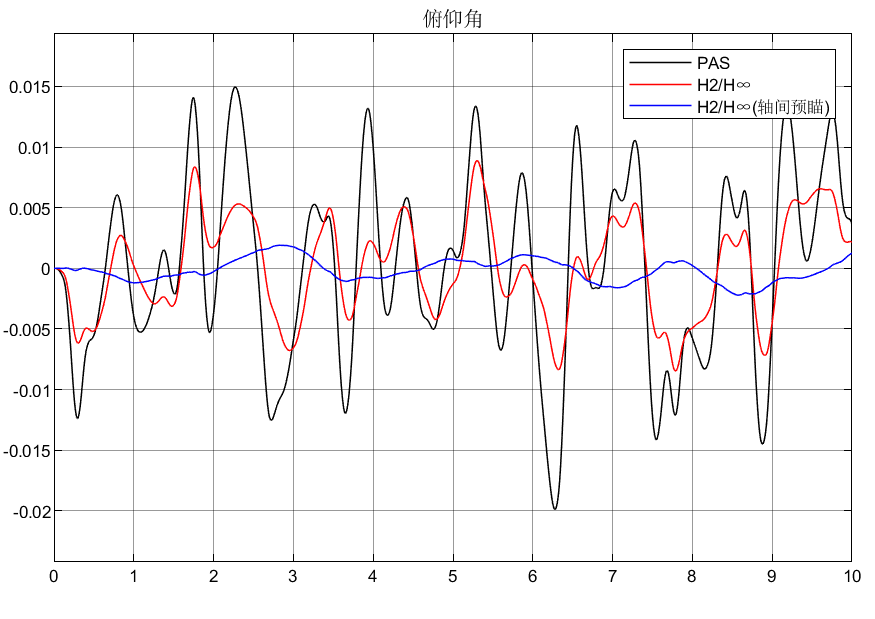
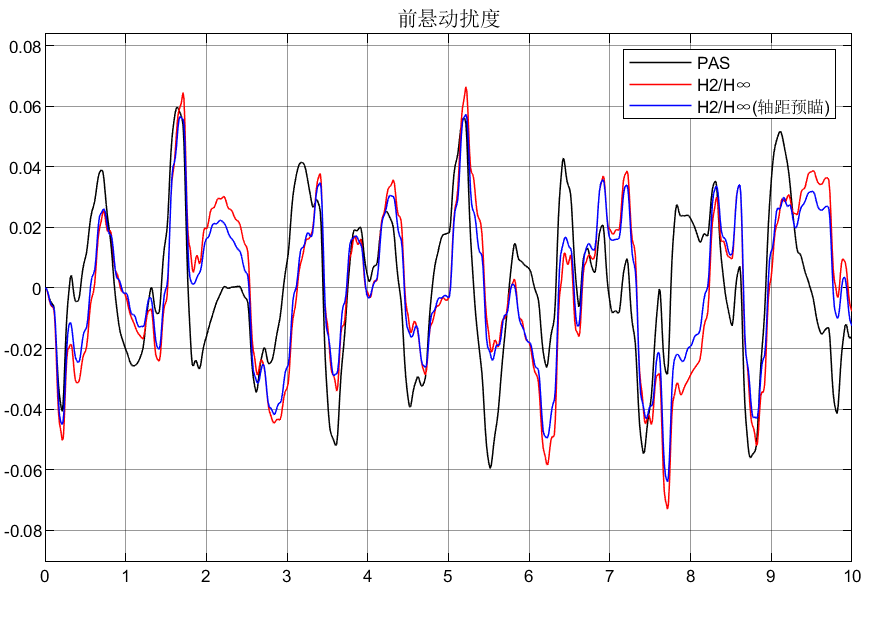
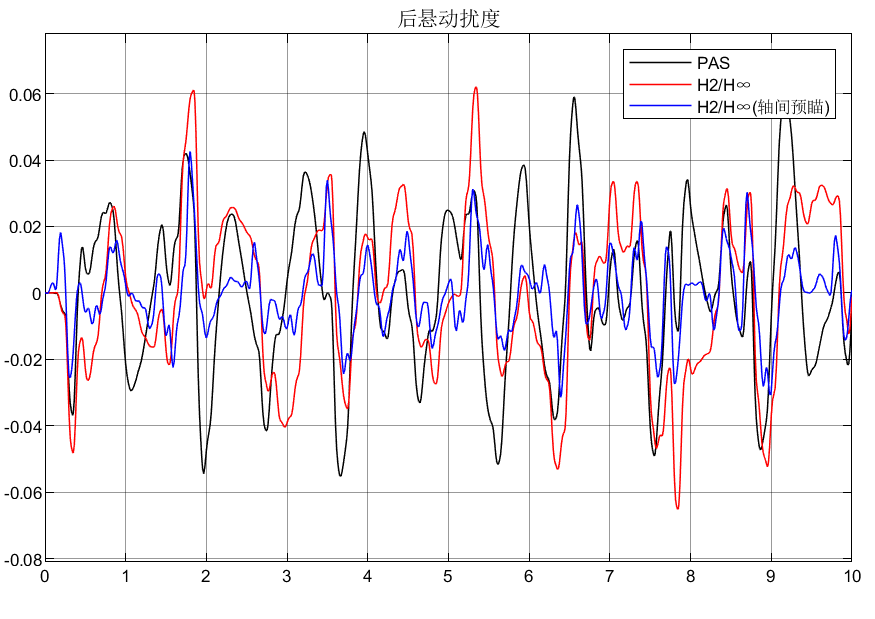
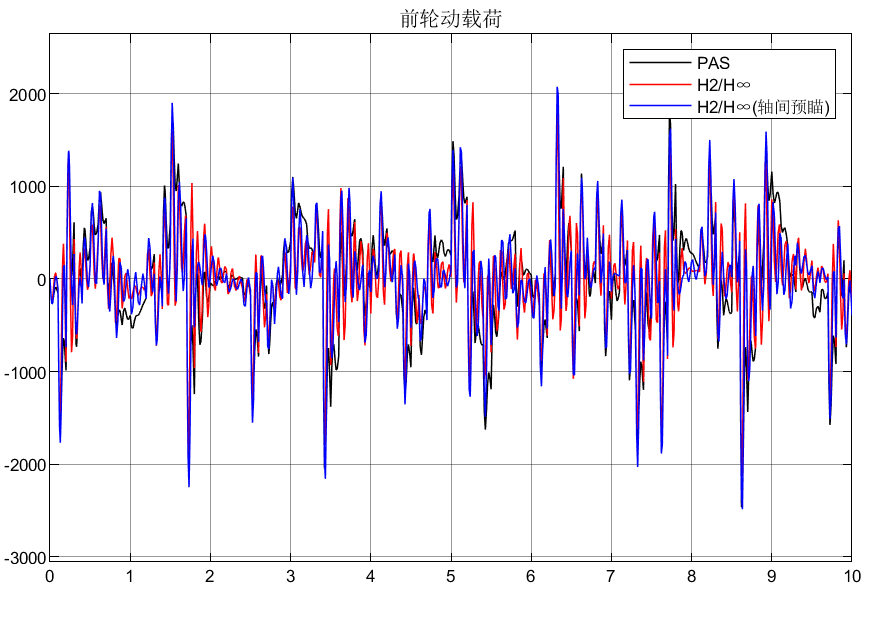
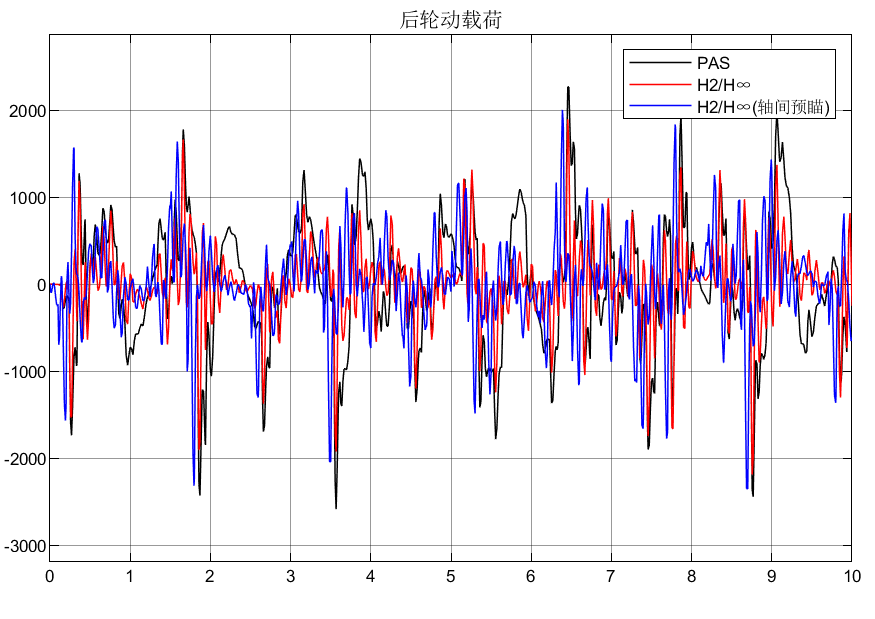
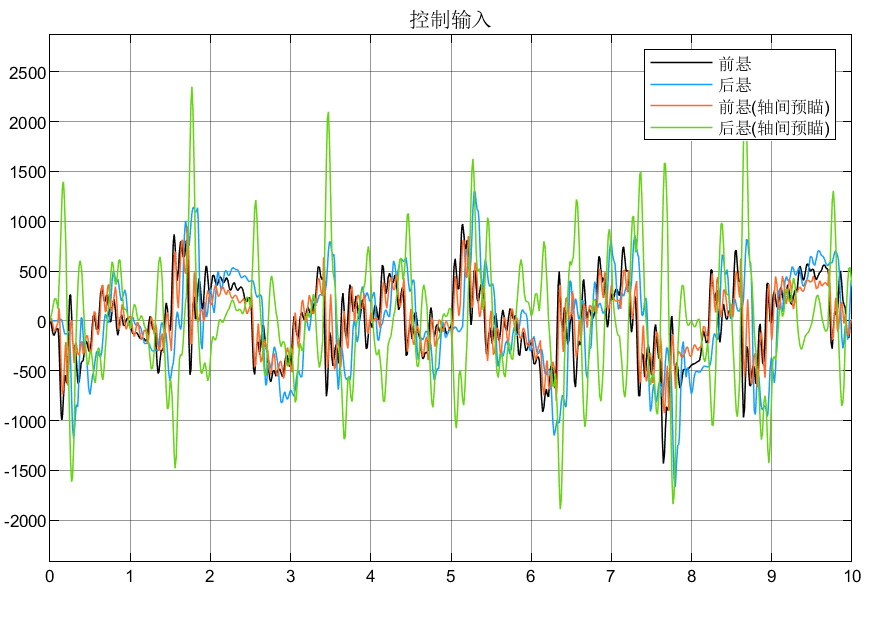
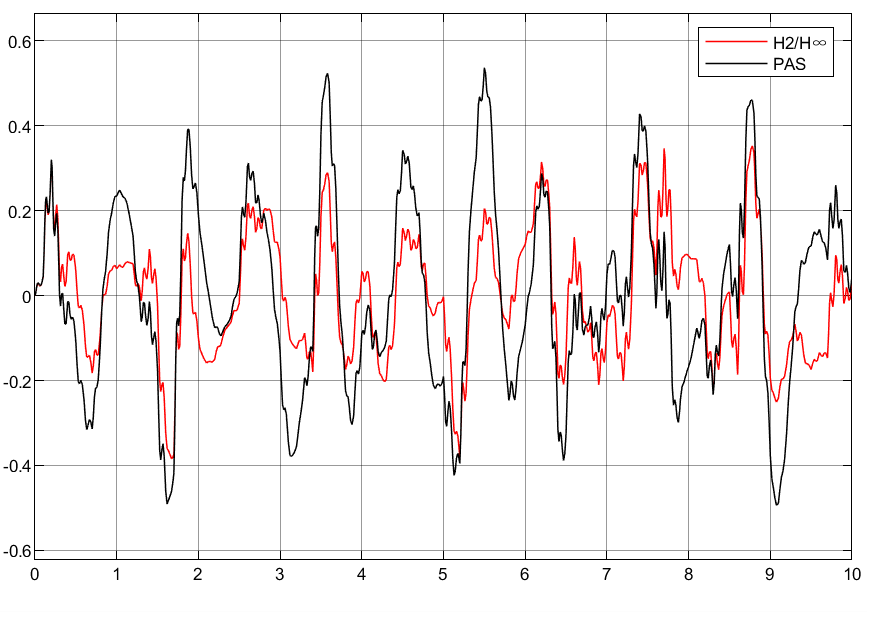
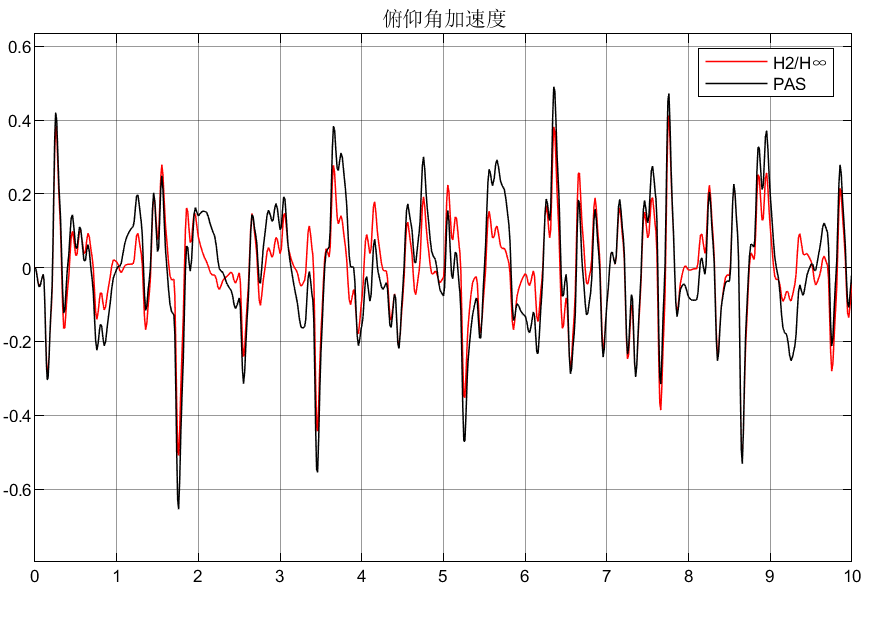
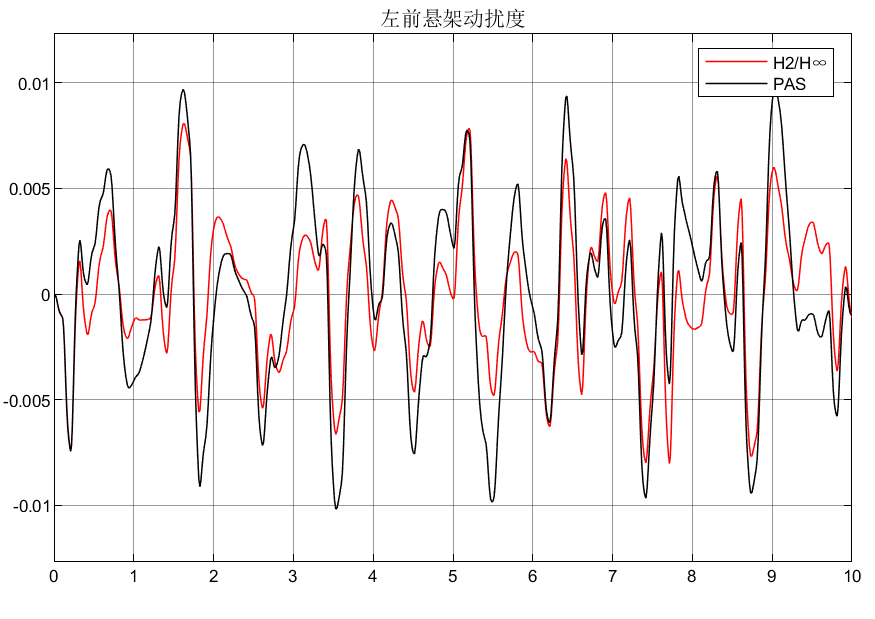
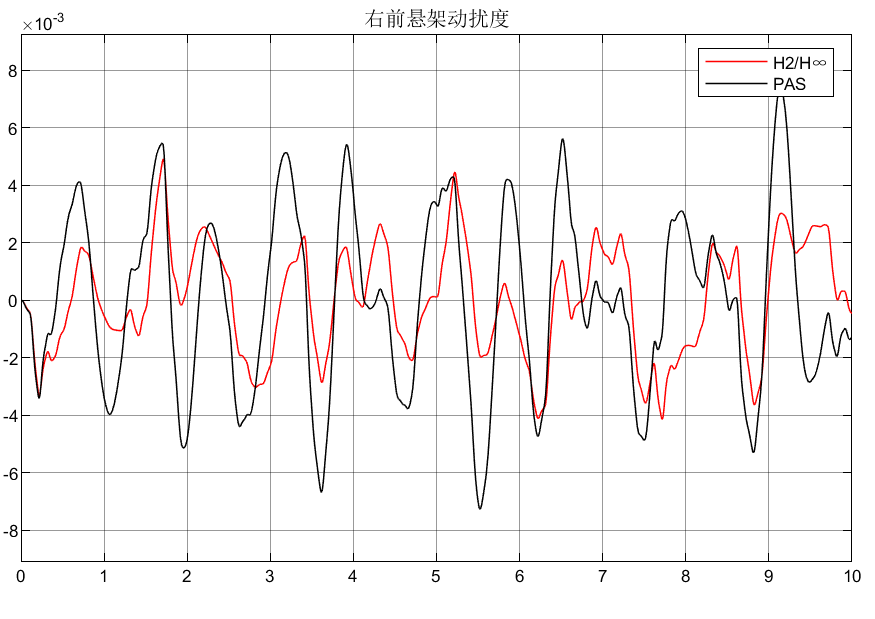
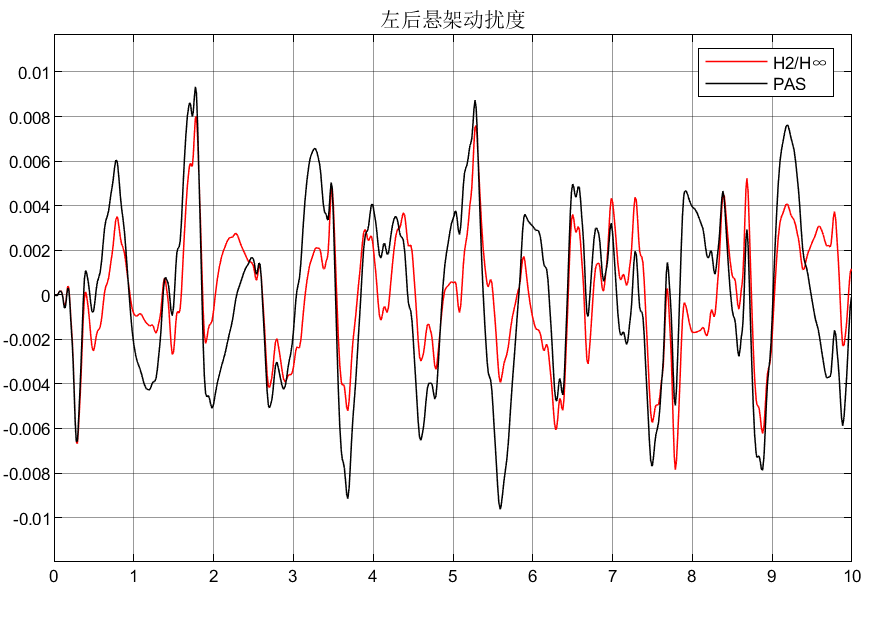
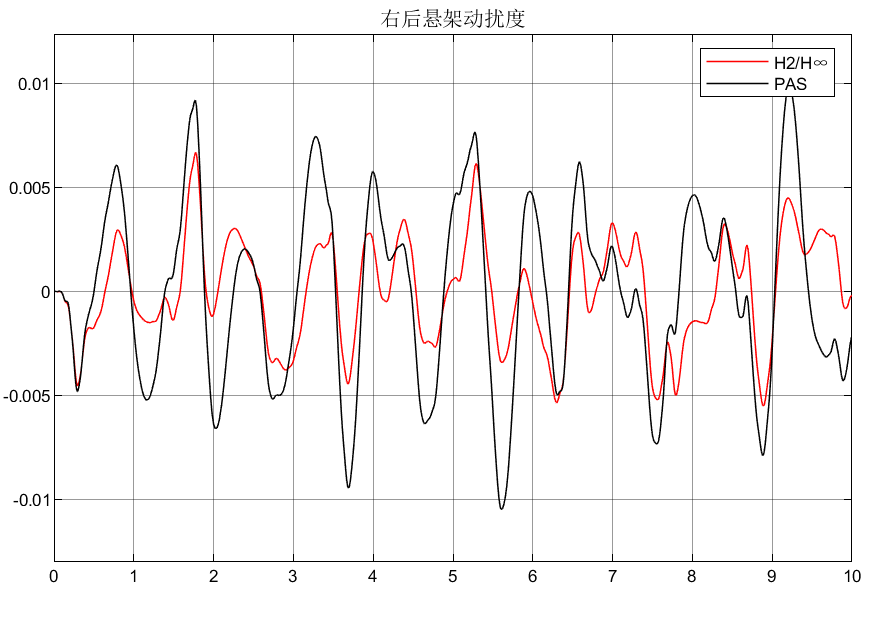
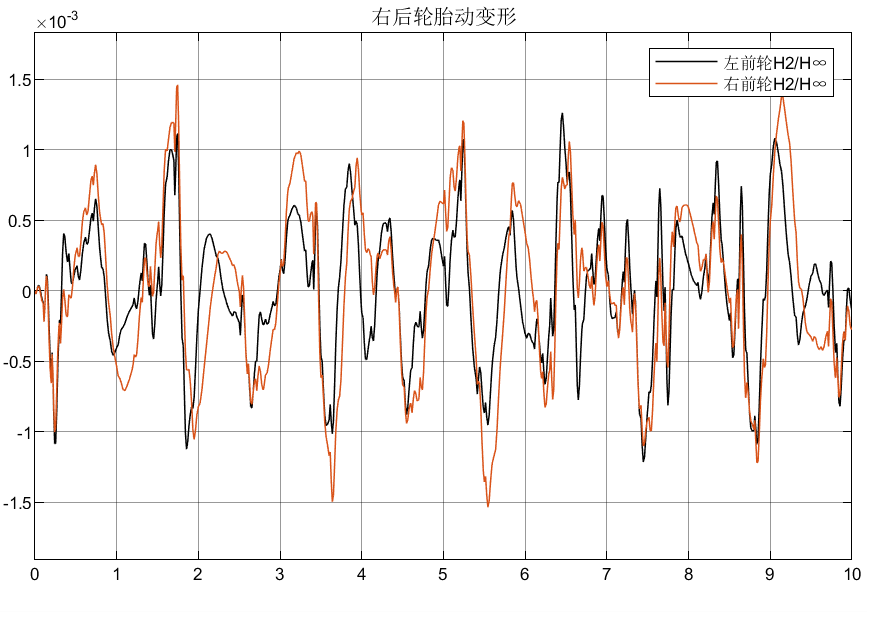
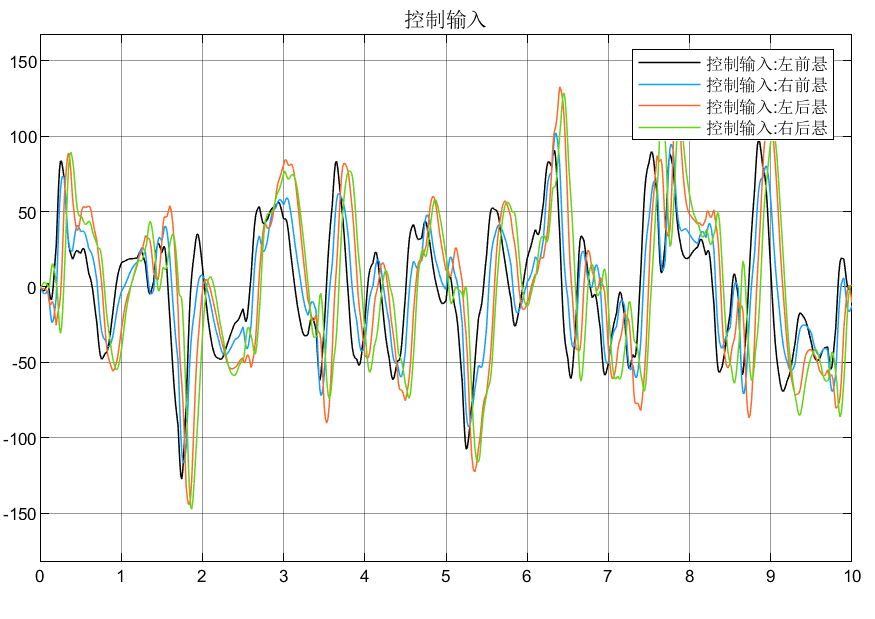
3.3仿真分析

4.总结
1.对于H2和H∞性能指标的调节可以输出其关系曲线,选取一个不那么损坏约束,但又能很大程度最小化性能指标的值
2.对于仿真分析,我选取随即激励的理由是随机激励工况很复杂,所以如果控制器的鲁棒项好的话,在随机路面得到验证,那么在其他路面一般是可行的!
参考文献
[1]宋刚,吴志刚,林家浩. 考虑时域硬约束的车辆主动悬架H∞控制[J]. 农业机械学报,2009,40(4):11-17.
[2].王莹,方敏,陈无畏. 基于4自由度车辆模型的电液主动悬架H∞控制[J]. 汽车工程,2004,26(1):9-12,23. DOI:10.3321/j.issn:1000-680X.2004.01.003.
[3] 史明光,方敏,陈无畏. 基于LMI的四自由度车辆模型主动悬架H∞控制[J]. 合肥工业大学学报(自然科学版),2004,27(3):237-241. DOI:10.3969/j.issn.1003-5060.2004.03.004.
[4] 陈品同,张博智. 电动汽车主动悬架约束H∞状态反馈控制策略与仿真研究[J]. 汽车零部件,2022(9):12-19. DOI:10.19466/j.cnki.1674-1986.2022.09.003.
[5] 史明光,陈无畏. 基于博弈论的H2/H∞混合控制及其在汽车主动悬架中的应用[J]. 控制理论与应用,2005,22(6):882-888. DOI:10.3969/j.issn.1000-8152.2005.06.007.
[6] 张进秋,王兴野,贾进峰,等. 主动悬架有限频域H∞时滞控制参数影响分析及优化[J]. 兵工学报,2018,39(9):1850-1857. DOI:10.3969/j.issn.1000-1093.2018.09.023.
[7] 王娟,刘志远,陈虹,等. 基于LMI的主动悬架的滚动时域H∞输出反馈控制[J]. 汽车工程,2009,31(1):37-41. DOI:10.3321/j.issn:1000-680X.2009.01.009.
[8] 张志勇,文桂林,钟志华. 车辆主动悬架的混合H2/H∞最优保性能控制[J]. 汽车工程,2007,29(7):606-610. DOI:10.3321/j.issn:1000-680X.2007.07.016.
[9] 方敏,史明光,陈无畏. 汽车主动悬架多目标H2/H∞混合控制[J]. 农业机械学报,2005,36(3):4-7,18. DOI:10.3969/j.issn.1000-1298.2005.03.002.
[10] 卜祥风,谢友浩. 混合型主动悬架H2/H∞控制研究[J]. 制造业自动化,2018,40(3):129-133. DOI:10.3969/j.issn.1009-0134.2018.03.034.
[11] 詹长书,曹先腾. 基于H∞理论的主动悬架状态反馈控制[J]. 森林工程,2020,36(5):92-98. DOI:10.3969/j.issn.1006-8023.2020.05.013.
[12] 宋刚,林家浩,吴志刚. 考虑参数不确定性的主动悬架鲁棒H2/H∞混合控制[J]. 动力学与控制学报,2008,6(2):156-164. DOI:10.3969/j.issn.1672-6553.2008.02.014.




![[数据结构与算法(严蔚敏 C语言第二版)]第1章 绪论(课后习题+答案解析)](https://img-blog.csdnimg.cn/1f5b53fe76a945978b85c6d121399f9c.png)