MIPI调试指南
Rev.0.1
June 18, 2019
© 2018 Horizon Robotics. All rights reserved.
Revision History
Thissection tracks the significant documentation changes that occur fromrelease-to-release. The following table lists the technical content changes foreach revision.
Revision | Date | Description |
V0.1 | 2019-06-18 | tianyu.zhang, Draft |
|
|
|
|
|
|
|
|
|
|
|
|
Contents
Revision History..................................................................................................
Contents................................................................................................................
References............................................................................................................
1 概述................................................................................................................
1.1 MIPI完整通路....................................................................................
1.2 名词缩写..........................................................................................
1.3 参数介绍..........................................................................................
1.3.1 通用参数................................................................................
1.3.2 MIPI Host专用参数.............................................................
1.3.3 MIPI Device专用参数.........................................................
2 参数配置........................................................................................................
2.1 MIPI Host配置...................................................................................
2.1.1 D-PHY clock配置.................................................................
2.1.2 IPI clock配置.........................................................................
2.1.3 HSD配置................................................................................
2.1.4 IPI配置....................................................................................
2.1.5 AdvancedFeatures..............................................................
2.2 MIPI Device配置...............................................................................
2.2.1 D-PHY clock配置.................................................................
2.2.2 PLL配置...................................................................................
2.2.3 IPI配置....................................................................................
2.2.4 VPG配置.................................................................................
3 调试建议........................................................................................................
3.1 配置流程..........................................................................................
3.1.1 RX配置流程...........................................................................
3.1.2 TX配置流程.........................................................................
3.2 错误流程.......................................................................................
3.2.1 RX流程错误.........................................................................
3.2.2 TX流程错误.........................................................................
3.3 参数错误.......................................................................................
3.3.1 Clock配置错误...................................................................
3.3.2 Frame rate配置错误.........................................................
4 错误分析.....................................................................................................
4.1 MIPI Host错误................................................................................
4.1.1 INT_ST_PHY_FATAL............................................................
4.1.2 INT_ST_PKT_FATAL.............................................................
4.1.3 INT_ST_FRAME_FATAL......................................................
4.1.4 INT_ST_PHY.........................................................................
4.1.5 INT_ST_PKT..........................................................................
4.1.6 INT_ST_IPI............................................................................
4.2 MIPI Device错误............................................................................
4.2.1 INT_ST_PHY.........................................................................
4.2.2 INT_ST_IPI
References
MIPI-CSI-2-Specification-v1
mipi_D-PHY_specification_v1-2
DWC_mipi_csi2_host_databook
DWC_mipi_csi2_host_user
DWC_mipicsi2_device_databook
DWC_mipicsi2_device_user
dwc_mipi_d_r4_tsmc28hpcp18ns_databook
dwc_mipi_d_t4_tsmc28hpcp18ns_databook
概述
本文主要针对MIPI调试过程中的常见问题进行一些分析,并结合MIPI配置参数对MIPI相关寄存器/功能的影响进行说明。尽量为调试MIPI的同学提供一些解决问题的方向,同时能更清楚的了解在用户层配置的参数会对MIPI通路造成什么样的影响。
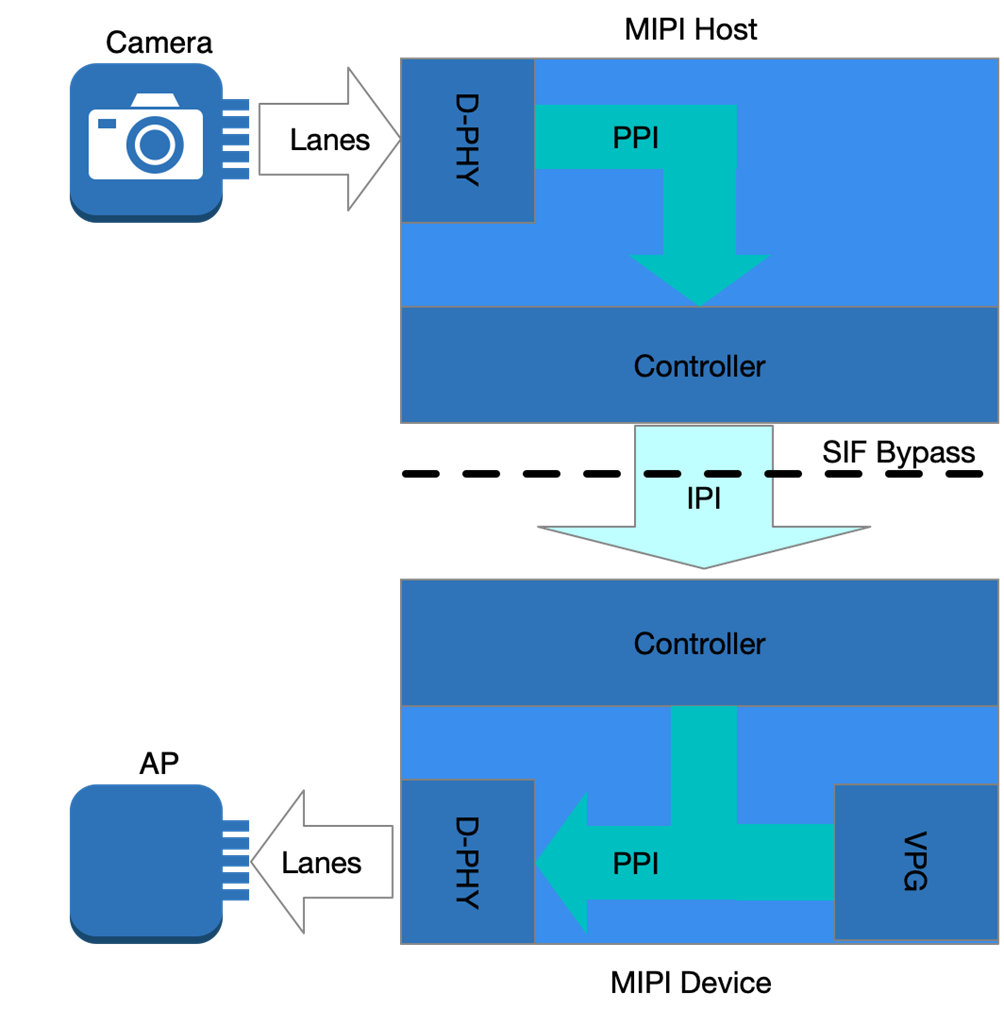
MIPI完整通路
名词缩写
PPI:PHY-Protocol Interface
IPI: ImagePixel Interface
HS: High-Speed
LP: Low-Power
RX: Receiver
TX:Transmitter
SoT: Start ofTransmission
SoF: Start ofFrame
Vsync: VerticalSynchronism
Hsync:Horizontal Synchronism
Mbps: Megabitsper second
FPS: FramesPer Second
HSA: HsyncActive time
HSD: HsyncDelay time
HBP: HorizontalBack Porch time
CLK: clock
ULPM: UltraLow Power Mode
参数介绍
通用参数
lane: MIPI传输中物理线对的数量
mipiclk: MIPI传输中总的Bit Rate, 单位Mbps
fps: Camera送数的帧率
width: Camera输出实际有效宽度,单位为pixel数量
height: Camera输出实际有效高度,单位为line数量
linelenth: Camera输出行长,包括有效宽度和消隐区的宽度,单位为pixel数量
framelenth: Camera输出行数,包括有效高度和消隐区的行数,单位为line数量
settle: Camera输出时,从LP到进入HS的delay
format: Camera输出图像格式,按照SIF的图像格式枚举配置
pix_len: Camera输出图像每个pixel占用的bit数,按照SIF的pixel length枚举配置
MIPI Host专用参数
hsa: IPI 产生的Hsync持续时间
hbp: IPI 产生Hsync到使能data_en的时间
hsd: IPI收到有效数据到产生Hsync(准备取数据)的delay时间
vc_num: Camera输入的virtual channel个数,最大支持2个
vc0_index: Camera输入的virtual channel 0需要对应的IPI index
vc1_index:Camera输入的virtual channel 1需要对应的IPI index
MIPI Device专用参数
format: MIPIDevice输出图像的CSI2格式,在device单独输出时使用,如IAR/VPG
width: MIPIDevice输出图像的宽度,在device单独输出时使用,如IAR/VPG
height: MIPIDevice输出图像的高度,在device单独输出时使用,如IAR/VPG
vpg: 是否开启VPG模式
ipi_lines:MIPI Device检测IPI传入图像的总行数,主要在IAR时使用
参数配置
本章节主要说明1.3中介绍的配置参数在MIPI配置中的使用,以及针对MIPI驱动配置的关键点进行说明
MIPI Host配置
MIPI Host与参数相关的关键配置主要分D-PHY clock的配置,IPI clock的配置,IPI及HSD的配置
D-PHY clock配置
关键函数:x2_mipi_dphy.c:mipi_dphy_clk_range
使用参数:lane,mipiclk
配置说明:
1. 根据mipiclk/lane,计算出单lane的bit rate(laneclk)
2. 根据laneclk, 结合data book,选择合适的HS clock range
3. 将range value,写入到IPS对应的寄存器中
data book参考:RX D-PHY data book page 143, Table 5-8
IPI clock配置
关键函数:x2_mipi_host.c:mipi_host_pixel_clk_select
使用参数:width,height, fps, linelenth, framelenth
配置说明:
1. 计算总的pixel clock, pixel clock = linelenth*framelenth*fps
特别说明,新的计算公式pixclk = (width + 128) * (height + 96) * fps
这里修改了pixclk的计算方式,主要是避免出现在Camera blanking过大时,HSD的计算会超出范围(最大4095)。理论上,pixel clk只要比Camera的实际传输速率大一些,就可以满足需求,但是这个方法对FPS的准确度要求较高,在项目中可以灵活调整下
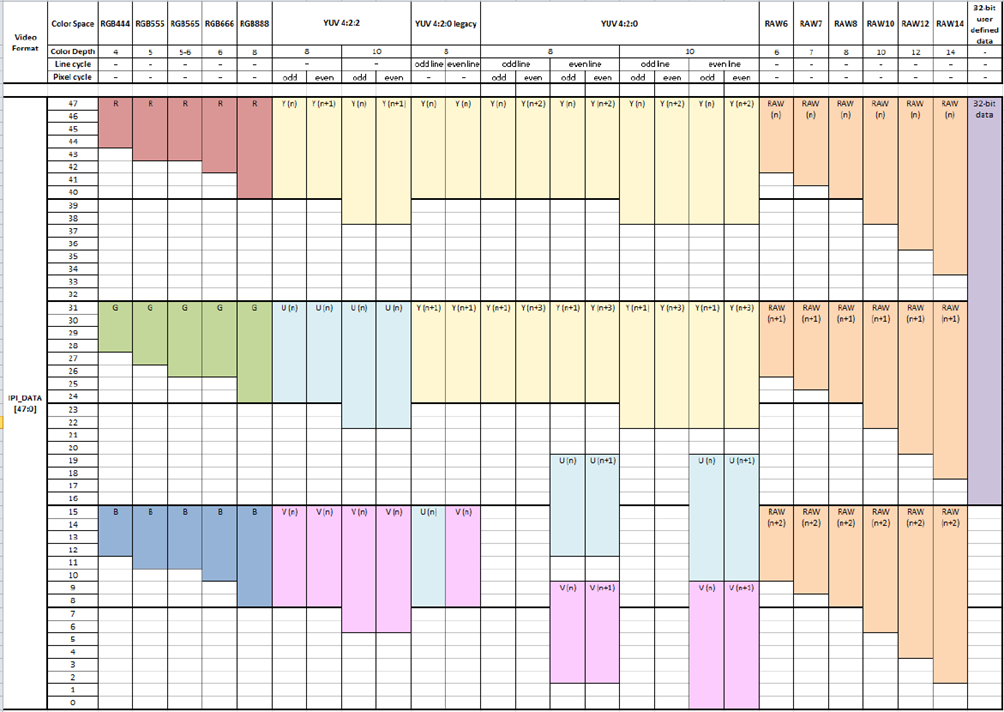
2. 根据data book说明,48-bit的IPI在传输raw时一个clock可以传3个pixel, yuv时一个clock可以传1个pixel。ipiclk= pixel clock (YUV), ipiclk = pixel clock / 3 (RAW)
3. 根据ipiclk,结合当前的clock tree, “向上”查找到合适的(且真实)的clock
data book参考:csi2 host data book page 53, Figure 2-28
HSD配置
关键函数:x2_mipi_host.c:mipi_host_get_hsd
使用参数:width,fps, linelenth, framelenth, format, pix_len, ipiclk, HSA, HBP
配置说明:
1. 在用户层会用format, pix_len转为CSI2的data type
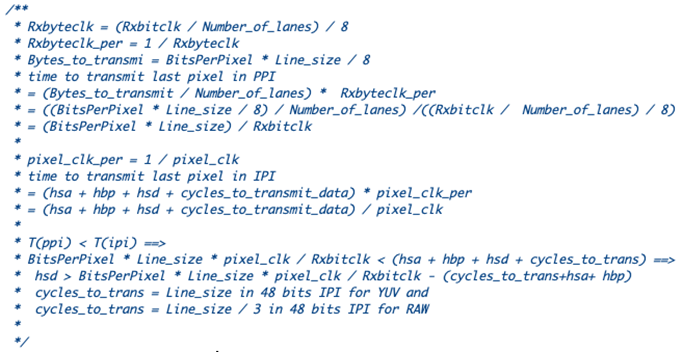
2. 根据data type, 得到bits_per_pixel和cycles_to_trans两个关键参数
3. 计算rx_bit_clk = linelenth*framelenth*fps*bits_per_pixel, line_size =width
4. HSD > (bits_per_pixel* line_size * pixclk / rx_bit_clk)-(hsa + hbp + cycles_to_trans)
data book参考:
HostController User Guide page 66, 3.3.3.1
Host data bookpage 60, 2.6.7.1 Camera Timing
IPI配置
关键函数:x2_mipi_host.c:mipi_host_configure_ipi
使用参数:format,pix_len , vc_num, vc0_index , vc1_index, HSA, HBP, HSD
配置说明:
1. 在用户层会用format, pix_len转为CSI2的data type,配置到DATA_TYPE寄存器
2. 如果vc_num==2, 会新增配置IPI2
3. vc0_index,vc1_index会分别配置到IPI_VCID, IPI2_VCID寄存器,表示IPI1接收virtual chanel id为vc0_index的数据,IPI2会接收virtual chanel id为vc1_index的数据
4. HSA=4,HBP=4为代码中的默认值,如果JSON文件有配置hsa, hbp, 则会用配置的值。HSD为2.1.3计算得出,如果JSON文件中有配置hsd,则会用配置的值
data book参考:
Host data bookpage 150, Table 5-5 MemMap/CSI2 Registers
Advanced Features
关键函数:x2_mipi_host.c:mipi_host_configure_ipi
使用参数:N/A
配置说明:
1. 默认没有开启Advanced Features,controller会自动识别合适的时机来产生Vsync, Hsync信号
2. 在使用不同的camera时可能需要配置相应的line event selection,控制controller产生Vsync, Hysnc的时机。比如Video数据在Vsync/Hsync很久后才来,可能需要开启en_video;Camera确认有送Line Start/End短包,可以开启en_line_start等
data book参考:
Host data bookpage 69, 2.6.12 IPI Advanced Features
Host data bookpage 190, Table 5-30 IPI_ADV_FEATURES
MIPI Device配置
MIPI Device与参数相关的关键配置主要分D-PHY clock的配置,PLL的配置,IPI的配置, VPG模式的配置。特别说明:MIPI Device的IPI Clock来源于MIPI Host, 不用单独配置
D-PHY clock配置
关键函数:x2_mipi_dphy.c:mipi_dphy_clk_range
使用参数:lane,mipiclk
配置说明:
1. 根据mipiclk/lane,计算出单lane的bit rate(laneclk)
2. 根据laneclk, 结合data book,选择合适的HS clock range
3. 将range value,写入到IPS对应的寄存器中
data book参考:TX D-PHY data book page 142, Table 5-12
PLL配置
关键函数:x2_mipi_dphy.c:mipi_tx_pll_div
使用参数:lane,mipiclk
配置说明:
1. 根据mipiclk/lane,计算出单lane的bit rate(laneclk)
2. 计算输出频率fout = PLL Fout(GHz) = data rate(Gbps) / 2
3. 根据fout, 结合data book中频率范围的说明,得到fvco和fout合适的分频关系
4. 计算fvco = fout << vco_div
5. 根据TX默认的参考时钟TX_REFSCLK_DEFAULT=24M,计算合适的分频(n)和倍频(m)值
特别说明:为了提高计算精度,目前固定n值为12,使分频器出来频率为整数2MHz
6. 因为非浮点运算精度问题,重新计算fout = fvco >> vco_div = ((refsclk * (*m + 2)) / (*n + 1))>> vco_div
7. 根据data book中vco range,选择合适的vco range以及当前range的频率上限
特别说明:
结合实际使用以及公式推导,data book中的VCO range value应该为fout range
8. 根据得到的fvco_max, 重新计算可以得到这个频率倍频(m)
特别说明:
这里重新根据fvco_max计算m值,是希望最终输出频率在vco range内尽量的大,因为在实测中遇到过,按照正常频点(fvco)计算出来的m直接使用的话,某些camera会遇到device报overflow的错误。请RTL分析原因中,有结论再更新。
data book参考:TX D-PHY data book page 67, PLL Programmability
IPI配置
关键函数:x2_mipi_dev.c:mipi_dev_initialize_ipi
使用参数:format,pix_len, width, height/ipi_lines
配置说明:
1. 在用户层会用format, pix_len转为CSI2的data type,配置到PKT_CFG寄存器
2. PKT_CFG可以控制Device是否发送line sync,以及隔行扫描
特别说明:如果配置了Arbitrary Value Mode, 需要额外配置START_LINE_NUM和STEP_LINE_NUM寄存器
3. 配置width到IPI_PIXELS寄存器,配置height+ 1(默认)或ipi_lines到IPI_LINES寄存器
特别说明:
为了满足MIPIDevice的时序需求,SIF在BYPASSIPI数据的过程中,在每帧图像最后会多加一个hsync,否则MIPI Device这里会报underflow的错误(参考Device Controller data boot Figure 2-24, Device IPI在最后一个data_en信号之后,还需要有一个Hsync, 去取最后一行的数据,否则会提前生成Frame End packet)。同时,需要在IPI_LINES这里要配置为height + 1 (多了一个SIF在帧尾加的hsync),否则会报error lines的错误。
另外,如果在MIPIHost中开启了Advance feature中的legacy mode, Host 会在生成Vsync的同时多生成一个Hsync, 此时MIPI DeviceIPI_LINES这里要配置为height + 2(1个Host在帧头加的Hsync, 1个SIF在帧尾加的Hsync)
data book参考:
DeviceController data book page 41, 2.3 Image Pixel Interface
DeviceController data book page 122, 5.1 memmap/CSI2 Registers
HostController data book page 57, 2.6.6 Vertical Timing
VPG配置
关键函数:x2_mipi_dev.c:mipi_dev_initialize_vgp
使用参数:format,pix_len, width, height, linelenth, framelenth
配置说明:
1. 在用户层会用format, pix_len转为CSI2的data type,配置到PKT_CFG寄存器
2. 配置width到PKT_SIZE, height到ACT_LINES寄存器
3. VPG模式下需要自己配置HSA/HBP/HLINE/VSA/VBP/VFP,目前HSA/HBP/VSA/VBP是固定的。
4. 计算HLINE, 根据data type和linelenth计算一行的时间(in lane byteclk)
5. 计算VFP, 根据framelenth计算VFP
6. 目前VPG模式配置为Vertical Color Bar, 可以根据需求调整
data book参考:
DeviceController data book page 51, 2.4 Video Pattern Generator
DeviceController data book page 122, 5.1 memmap/CSI2 Registers
调试建议
本章节主要介绍在MIPI调试中容易出错的关键点。主要介绍下Host/Camera,Device/AP Rx的流程关系,以及参数配置错误可能带来的问题
配置流程
RX配置流程
参考HostController User Guide 3.3 Programming Flow
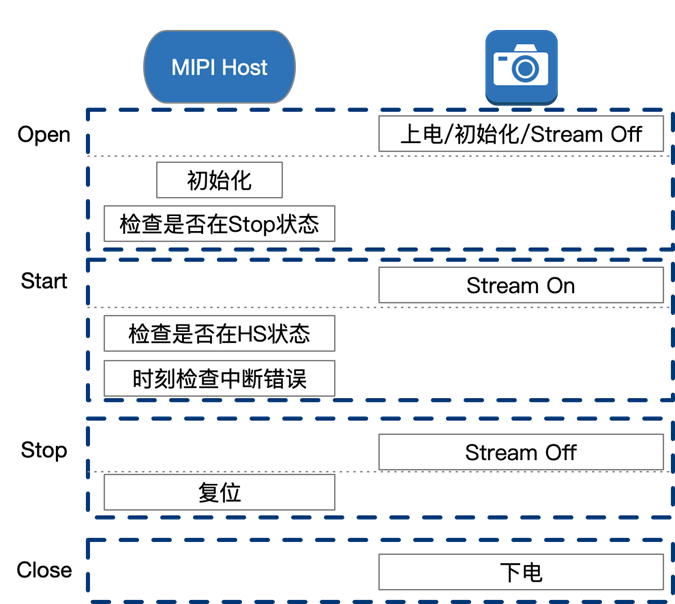
MIPI Host的配置流程大体分为3个步骤
1. 初始化: Start up -> Initialize -> Configure IPI
此时Host会Check 线上Stop状态
此时Camera应该在LP11, 即Camera处于Stop状态/Stream Off状态
2. 开始工作: Start HS Reception -> Detect Errors
此时Host会Check 线上HS状态,并注册系统中断,如果收到中断要及时查看对应的中断状态寄存器
此时Camera应该在HS mode,即Camera开始送数/Stream On状态
3. 结束: Stop HS Reception -> Reset Controller/PHY
此时Camera应该在LP11,即Camera处于Stop状态/Stream Off状态,掉电也可
TX配置流程
参考DeviceController User Guide 3.2 Programming Flow
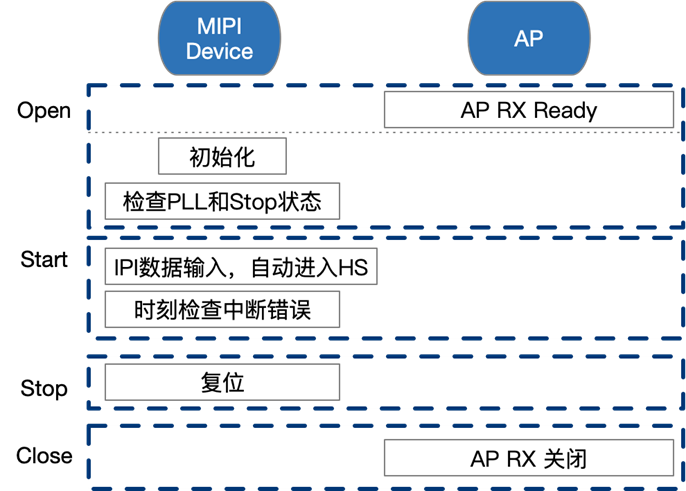
MIPI Device的配置流程大体分为3个步骤
1. 初始化: Initialize PHY -> Initialize Controller -> Wake Up
此时Device会检测PLL Lock状态并确认是否线上进入LP11, 即处于Stop状态, 等待IPI数据输入
此时AP侧RX应该已经初始化完毕,并处于等待数据输入的状态
2. 开始工作:
IPI数据到Device时,Device会自动进入HS状态并开始向外输出数据
3. 结束: Reset Controller/PHY
错误流程
RX流程错误
1. Camera在MIPI Host初始化完毕前就开始送数
结果:MIPIHost在初始化的过程中或者刚初始化完内部信号不稳定时,收到Camera的数据,导致PHY或IPI出现不可恢复的错误。
建议:按照3.1.1的顺序对Camera/Host进行配置,其中Host初始化时建议不要绕过Stop和HS的状态检查,避免出现一些不可预知的问题
2. 在MIPI Host开始正常工作时,不断的重启Camera
结果:Camera再重启/上下电时,不能保证Camera本身TX部分数据的完整性和准确性,可能会对MIPI Host的工作状态造成影响
建议:Camera启/停时,最好按照3.1.1的顺序对MIPIHost也进行同样的启/停操作
TX流程错误
1. 在AP侧RX还没有准备好时,Camera->Host->SIF->Device已经开始输出
结果:会造成AP侧RX出现和我们MIPI Host同样类似的问题,如3.2.1
同时,有测量过,如果AP侧RX没有准备好,或者AP侧悬空时,MIPI Device的输出信号会异常,如Clock Lane无信号,Data Lane数据异常的情况
参数错误
Clock配置错误
涉及参数:mipiclk,lane, settle
1. lane speed= mipiclk/lane,这个参数会用于配置Host/Device的PHY基本配置,涉及Host/Device PHY的HS clock range, Device PHY的PLL计算,同时lane数也会配置到Host/Device PHY的相关寄存器。这2个参数必须要正确!!!
2. settle, 正常这个参数PHY可以自动适配,但是有些极端情况下PHY适配不了这个参数,因此在驱动中开启了settle的配置,正常需要Camera厂商提供这个参数,单位为PPI clock,如果厂商未提供,可以试错,这个值的范围很小且鲁棒性尚可
错误情况:如果以上参数配置错误,会导致PHY在接收/解析CSI2数据时直接出错,报各种PHY/PKT/FRAME Fatal的异常中断
Frame rate配置错误
涉及参数:width, height, linelenth, framelenth, fps
1. 对于MIPI Host,这些参数会参与IPI Clock以及HSD的计算,如果配置错误,会导致IPI报overflow/underflow,最终影响数据向SIF传输的正确性
2. 对于MIPI Device, width/height是直接配置到IPI寄存器的,直接影响最终输出实际尺寸。linelenth和framelenth会在VPG模式时用到,模拟正常Camera输出的blanking
错误分析
本章节主要针对调试中常见的错误LOG进行简要的说明和分析,并提供一些之前总结的解决思路
MIPI Host错误
参考HostController User Guide page 115 Error Handling
Host data bookpage 76, 2.9 Error Detection
Host data bookpage 150, Table 5-5 MemMap/CSI2 Registers
MIPI CSI-2 Specificaation
INT_ST_PHY_FATAL
错误描述:在datalane上SOT检测出错且无法修复,报出ErrSotSyncHS, SOT为LP-HS的必有数据包,出错会影响数据接收
错误分析:
1. 主要检查PHY Clock以及settle的配置,参考3.3.1
2. 如参数配置确认无误,根据3.1.1确认Camera/Host初始化时序
3. 如果前2条确认无误,需要示波器测量Camera输出的数据是否正常以及信号质量
INT_ST_PKT_FATAL
错误描述:数据传输中和Packet相关的错误
1. 数据包中ECC错误,报出ErrEccDouble
2. 数据包中CRC校验错误,报出ErrCrc
错误分析:
1. 主要检查PHY Clock以及settle的配置,参考3.3.1
2. 如参数配置确认无误,根据3.1.1确认Camera/Host初始化时序
3. 如果前2条确认无误,需要示波器测量Camera输出的数据是否正常以及信号质量
INT_ST_FRAME_FATAL
错误描述:数据传输中Frame相关的错误,包括:
1. 整帧数据中有CRC错误,报出ErrFrameData:
2. SOF/EOF没有配对,比如连续收到两次同一个VC的SOF没有收到EOF,报出ErrFrameSync
3. FrameNumber顺序错误,比如前一帧SOF的framenumber是1,下一次收到的frame number变成了4
错误分析:
1. 主要检查PHY Clock以及settle的配置,参考3.3.1
2. 如参数配置确认无误,根据3.1.1确认Camera/Host初始化时序
3. 如果前2条确认无误,需要示波器测量Camera输出的数据是否正常以及信号质量
INT_ST_PHY
错误描述:datalane上的Warning
1. SOT检测出错,但是PHY可以自动修复(此时数据也是不可信的),报出ErrSotHs
2. Escape进入错误,Escape cmd只有在ULPM下有用,报出ErrEsc
错误分析:
1. 主要确认Camera/Host初始化时序
2. 如果时序确认无误,需要示波器测量Camera输出的数据是否正常以及信号质量
INT_ST_PKT
错误描述:数据传输中和Packet相关的Warning
1. Data type不识别或者不支持,报出ErrID
2. 出现一个ECC错误,已经自动修正了,报出ErrEccCorrected
错误分析:
1. 确认pixlen, format配置是否正确,比如Camera送RAW8,Host却配为RAW12
2. 确认Camera/Host初始化时序
3. 如果时序确认无误,需要示波器测量Camera输出的数据是否正常以及信号质量
INT_ST_IPI
错误描述:IPI相关的Warning
1. FIFOunderflow: IPI在取到足够的pixel数量前FIFO已经空了
错误分析:IPIClock过快,或者HSD过小,导致PPI的数据还没有送完,IPI已经(提前)把FIFO的数据取完了。结合2.1.2和2.1.3,检查width,height, linelenth, framelenth, fps的配置是否正确
2. FIFO overflow:FIFO溢出
错误分析:IPIClock过慢,或者IPI取数慢了,比如HSD过大或者在收到Hsync后过了太久(超过根据blanking计算出的HSD时间太多),导致FIFO已经被塞满后IPI还没开始取数或者IPI取数速度低于PPI填充FIFO的速度导致FIFO被塞满。结合2.1.2和2.1.3,检查width, height, linelenth, framelenth, fps的配置是否正确。
另外可以通过2.1.5介绍的ADV_FEATURE寄存器的配置,调整Hsync产生的时机
3. Frame SyncError: 新的Vsync来的时候,上一帧还没有结束
错误分析: 没有遇到过这种情况,只能从字面上推测,可能某些情况下会和ErrFrameSync的情况一起出现
4. FIFO nempty:在新的Vsync来的时候,FIFO里还有数据
错误分析:通常和FIFO Overflow or Underflow一起出现,尤其是Overflow的情况,overflow时FIFO始终处于full的状态,所以一定也会报出nempty。underflow时,因为IPI在FIFO数据填充完前已经结束取数了,所以在新的Vsync来时FIFO里还有上一帧最后被填进去的一些数据。
在X1时遇到过FIFO nempty独立出现的情况,目前X2还没有遇到过。这种情况的发生应该主要出现在3.2.1 流程上的一些问题,在Host正常工作前,FIFO里已经被填了一些数据。开启MEM_FLUSH寄存器的auto flush功能,可能会缓解
MIPI Device错误
参考DeviceController data book page 122, 5.1 memmap/CSI2 Registers
如果再调试过程中已经出现MIPI Host报错,那么MIPI Device的报错不用继续分析,Host报错会导致IPI上的数据已经异常,继续分析MIPI Device报错意义不大
INT_ST_PHY
错误描述:TXD-PHY上的错误
1. TX想要进入LP1, 即想要将line拉高时,检测到了RX端的控制争夺(拉不起来),报errcontentionlp1
2. TX想要进入LP0, 即想要将line拉低时,检测到了RX端的控制争夺(拉不下去),报errcontentionlp0
3. TX想要进入HS,检测到了RX端的控制争夺,导致HS timeout
错误分析:
目前没有遇到过这种错误,但是从字面看,应该是AP侧RX处于错误的状态且对MIPI Lane有强制动作(如拉高,拉低等),导致TX这里进行传输时出现无法控制Lane上行为。如3.2.2中描述,建议遵循3.1.2的配置流程
INT_ST_IPI
错误描述:IPI相关的Warning
1. errpixel:IPI收到的pixel数与配置到寄存器的pixel数(行长)不符
错误分析:主要检查配置参数width是否错误,width大了和小了都会报这个错误。如果width偏差过大,还会报overflow的错误
2. fifo_overflow:FIFO溢出
错误分析:主要检查配置参数width是否错误,width如果配置比实际大很多,会报errpixel的同时报出overflow。另外有遇到过在低频情况时(400Mbps/Lane), 如果如2.2.2 PLL配置中m值过小,也会报出这个错误,可以理解为取数据速度比送数速度慢。目前驱动中PLL的计算已经能适配多个项目,如果后续项目遇到Device Clock的问题修改了计算方式,导致报出overflow的问题可以参考这里
3. errline:IPI收到的line数与配置到寄存器的line数不符
错误分析:主要检查配置参数height是否错误,height大了和小了都会报这个错误。如果height偏小,还会报underflow的错误
4.fifo_underflow: IPI在取数时FIFO为空
错误分析:主要检查配置参数height是否错误,height偏小,在报出errline的同时会报underflow。另外,如果遇到只报underflow的情况,参考2.2.3中描述,确认SIF是否在帧尾加了Hsync。