文章目录
- 1. 原理概述
- 2. 实验环节
- 2.1 验证与opencv 库函数的结果一致
- 2.2 与 双边滤波比较
- 2.3 引导滤波应用,fathering
- 2.3 引导滤波应用,图像增强
- 2.4 灰度图引导,和各自通道引导的效果差异
- 2.5 不同参数设置影响
- 3. 参考
引导滤波
1. 原理概述
引导滤波是三大保边平滑算法之一。
原理介绍参考 图像处理基础(一)引导滤波
2. 实验环节
2.1 验证与opencv 库函数的结果一致
- 引导图是单通道时的函数guided_filter(I,p,win_size,eps)
- 引导图时三通道时的函数multi_dim_guide_filter(I, p, r, eps)
- I, p的输入如果归一化 0-1之间,则eps设置为小于1的数,比如0.2,
如果没有归一化,则 eps 需要乘以 (255 * 255) - I, p应该是浮点数
- cv2.ximgproc.guidedFilter 的输入参数r是 window_size // 2
实验图像

guided_filter 和multi_dim_guide_filter 代码:
import cv2
import numpy as np
from matplotlib import pyplot as plt
def guided_filter(I,p,win_size,eps):
'''
% - guidance image: I (should be a gray-scale/single channel image)
% - filtering input image: p (should be a gray-scale/single channel image)
% - local window radius: r
% - regularization parameter: eps
'''
mean_I = cv2.blur(I,(win_size,win_size))
mean_p = cv2.blur(p,(win_size,win_size))
mean_II = cv2.blur(I*I,(win_size,win_size))
mean_Ip = cv2.blur(I*p,(win_size,win_size))
var_I = mean_II - mean_I*mean_I
cov_Ip = mean_Ip - mean_I*mean_p
#print(np.allclose(var_I, cov_Ip))
a = cov_Ip/(var_I+eps)
b = mean_p-a*mean_I
mean_a = cv2.blur(a,(win_size,win_size))
mean_b = cv2.blur(b,(win_size,win_size))
q = mean_a*I + mean_b
#print(mean_II.dtype, cov_Ip.dtype, b.dtype, mean_a.dtype, I.dtype, q.dtype)
return q
def multi_dim_guide_filter(I, p, r, eps):
"""
I 是三通道
p 是单通道或者多通道图像
"""
out = np.zeros_like(p)
if len(p.shape) == 2:
out = multi_dim_guide_filter_single(I, p, r, eps)
else:
for c in range(p.shape[2]):
out[..., c] = multi_dim_guide_filter_single(I, p[..., c], r, eps)
return out
def multi_dim_guide_filter_single(I, p, r, eps):
"""
I : 导向图,多个通道 H, W, C
p : 单个通道 H, W, 1
radius : 均值滤波核长度
eps:
"""
# if len(p.shape) == 2:
# p = p[..., None]
r = (r, r)
mean_I_r = cv2.blur(I[..., 0], r);
mean_I_g = cv2.blur(I[..., 1], r);
mean_I_b = cv2.blur(I[..., 2], r);
# variance of I in each local patch: the matrix Sigma in Eqn(14).
# Note the variance in each local patch is a 3x3 symmetric matrix:
# rr, rg, rb
# Sigma = rg, gg, gb
# rb, gb, bb
var_I_rr = cv2.blur(I[..., 0] * (I[..., 0]), r) - mean_I_r * (mean_I_r) + eps
var_I_rg = cv2.blur(I[..., 0] * (I[..., 1]), r) - mean_I_r * (mean_I_g)
var_I_rb = cv2.blur(I[..., 0] * (I[..., 2]), r) - mean_I_r * (mean_I_b)
var_I_gg = cv2.blur(I[..., 1] * (I[..., 1]), r) - mean_I_g * (mean_I_g) + eps
var_I_gb = cv2.blur(I[..., 1] * (I[..., 2]), r) - mean_I_g * (mean_I_b)
var_I_bb = cv2.blur(I[..., 2] * (I[..., 2]), r) - mean_I_b * (mean_I_b) + eps
# Inverse of Sigma + eps * I
invrr = var_I_gg * (var_I_bb) - var_I_gb * (var_I_gb)
invrg = var_I_gb * (var_I_rb) - var_I_rg * (var_I_bb)
invrb = var_I_rg * (var_I_gb) - var_I_gg * (var_I_rb)
invgg = var_I_rr * (var_I_bb) - var_I_rb * (var_I_rb)
invgb = var_I_rb * (var_I_rg) - var_I_rr * (var_I_gb)
invbb = var_I_rr * (var_I_gg) - var_I_rg * (var_I_rg)
covDet = invrr * (var_I_rr) + invrg * (var_I_rg) + invrb * (var_I_rb)
invrr /= covDet
invrg /= covDet
invrb /= covDet
invgg /= covDet
invgb /= covDet
invbb /= covDet
# process p
mean_p = cv2.blur(p, r)
mean_Ip_r = cv2.blur(I[..., 0] * (p), r)
mean_Ip_g = cv2.blur(I[..., 1] * (p), r)
mean_Ip_b = cv2.blur(I[..., 2] * (p), r)
# covariance of(I, p) in each local patch.
cov_Ip_r = mean_Ip_r - mean_I_r * (mean_p)
cov_Ip_g = mean_Ip_g - mean_I_g * (mean_p)
cov_Ip_b = mean_Ip_b - mean_I_b * (mean_p)
a_r = invrr * (cov_Ip_r) + invrg * (cov_Ip_g) + invrb * (cov_Ip_b)
a_g = invrg * (cov_Ip_r) + invgg * (cov_Ip_g) + invgb * (cov_Ip_b)
a_b = invrb * (cov_Ip_r) + invgb * (cov_Ip_g) + invbb * (cov_Ip_b)
b = mean_p - a_r * (mean_I_r) - a_g * (mean_I_g) - a_b * (mean_I_b)
return (cv2.blur(a_r, r) * (I[..., 0])
+ cv2.blur(a_g, r) * (I[..., 1])
+ cv2.blur(a_b, r) * (I[..., 2])
+ cv2.blur(b, r))
实验代码:
def compare_1_3channel(im, r, eps):
"""
分通道进行和一起进行,结果完全一致
"""
out1 = guided_filter(im, im, r, eps)
out2 = np.zeros_like(out1)
out2[..., 0] = guided_filter(im[..., 0], im[..., 0], r, eps)
out2[..., 1] = guided_filter(im[..., 1], im[..., 1], r, eps)
out2[..., 2] = guided_filter(im[..., 2], im[..., 2], r, eps)
return out1, out2
if __name__ == "__main__":
file = r'D:\code\denoise\denoise_video\guide_filter_image\dd.png'
kernel_size= 7
r = kernel_size // 2
eps = 0.002
input = cv2.imread(file, 1)
out1, out2 = compare_1_3channel(input, kernel_size, (eps * 255 * 255))
cv2.imwrite(file[:-4] + 'out1.png', out1) # 这个结果错误,因为uint8 * uint8仍然赋给了uint8
# out2.png, out3.png, out4.png 结果基本一致
input = input.astype(np.float32) # 要转换为float类型
out1, out2 = compare_1_3channel(input, kernel_size, (eps * 255 * 255))
cv2.imwrite(file[:-4] + 'out2.png', out2)
out1[..., 0] = cv2.ximgproc.guidedFilter(input[..., 0], input[..., 0], r, (eps * 255 * 255))
out1[..., 1] = cv2.ximgproc.guidedFilter(input[..., 1][..., None], input[..., 1][..., None], 3, (eps * 255 * 255))
out1[..., 2] = cv2.ximgproc.guidedFilter(input[..., 2][..., None], input[..., 2][..., None], 3, (eps * 255 * 255))
print('tt : ', out1.min(), out1.max())
out4 = np.clip(out1 * 1, 0, 255).astype(np.uint8)
cv2.imwrite(file[:-4] + 'out4.png', out4)
input = input / 255
input = input.astype(np.float32)
out1, out2 = compare_1_3channel(input, kernel_size, (eps)) # 注意0-1 和 0-255 在eps的差异。
out3 = np.clip(out1 * 255, 0, 255).astype(np.uint8)
cv2.imwrite(file[:-4] + 'out3.png', out3)
# out5.png 和 out6.png结果一致,利用灰度图作为导向图, 注意半径和kernel_size的区别。
guide= cv2.cvtColor(input,cv2.COLOR_BGR2GRAY)
out1 = cv2.ximgproc.guidedFilter(guide, input, r, (eps))
out5 = np.clip(out1 * 255, 0, 255).astype(np.uint8)
cv2.imwrite(file[:-4] + 'out5.png', out5)
out2[..., 0] = guided_filter(guide, input[..., 0], kernel_size, eps)
out2[..., 1] = guided_filter(guide, input[..., 1], kernel_size, eps)
out2[..., 2] = guided_filter(guide, input[..., 2], kernel_size, eps)
out6 = np.clip(out2 * 255, 0, 255).astype(np.uint8)
cv2.imwrite(file[:-4] + 'out6.png', out6)
plt.figure(figsize=(9, 14))
plt.subplot(231), plt.axis('off'), plt.title("guidedFilter error")
plt.imshow(cv2.cvtColor(out1, cv2.COLOR_BGR2RGB))
plt.subplot(232), plt.axis('off'), plt.title("cv2.guidedFilter")
plt.imshow(cv2.cvtColor(out2, cv2.COLOR_BGR2RGB))
plt.subplot(233), plt.axis('off'), plt.title("cv2.guidedFilter")
plt.imshow(cv2.cvtColor(out3, cv2.COLOR_BGR2RGB))
plt.subplot(234), plt.axis('off'), plt.title("cv2.guidedFilter")
plt.imshow(cv2.cvtColor(out4, cv2.COLOR_BGR2RGB))
plt.subplot(235), plt.axis('off'), plt.title("cv2.guidedFilter")
plt.imshow(cv2.cvtColor(out5, cv2.COLOR_BGR2RGB))
plt.subplot(236), plt.axis('off'), plt.title("cv2.guidedFilter")
plt.imshow(cv2.cvtColor(out6, cv2.COLOR_BGR2RGB))
plt.tight_layout()
plt.show()
输出结果

2.2 与 双边滤波比较
个人感觉引导滤波更好

完整代码如下:
if __name__=='__main__':
file = r'D:\code\denoise\denoise_video\guide_filter_image\dd.png'
kernel_size = 7
r = kernel_size // 2
eps1 = 0.004/2
eps2 = 0.002/4
input = cv2.imread(file, 1)
input = input.astype(np.float32) # 要转换为float类型
out1 = guided_filter(input, input, kernel_size, eps1*255*255)
out2 = cv2.bilateralFilter(input, kernel_size, eps2*255*255, eps2*255*255)
out1 = np.clip(out1, 0, 255).astype(np.uint8)
out2 = np.clip(out2, 0, 255).astype(np.uint8)
cv2.imwrite(file[:-4] + 'guide.png', out1)
cv2.imwrite(file[:-4] + 'bi.png', out2)
cv2.imshow("guide", out1)
cv2.imshow("bi", out2)
cv2.waitKey(0)
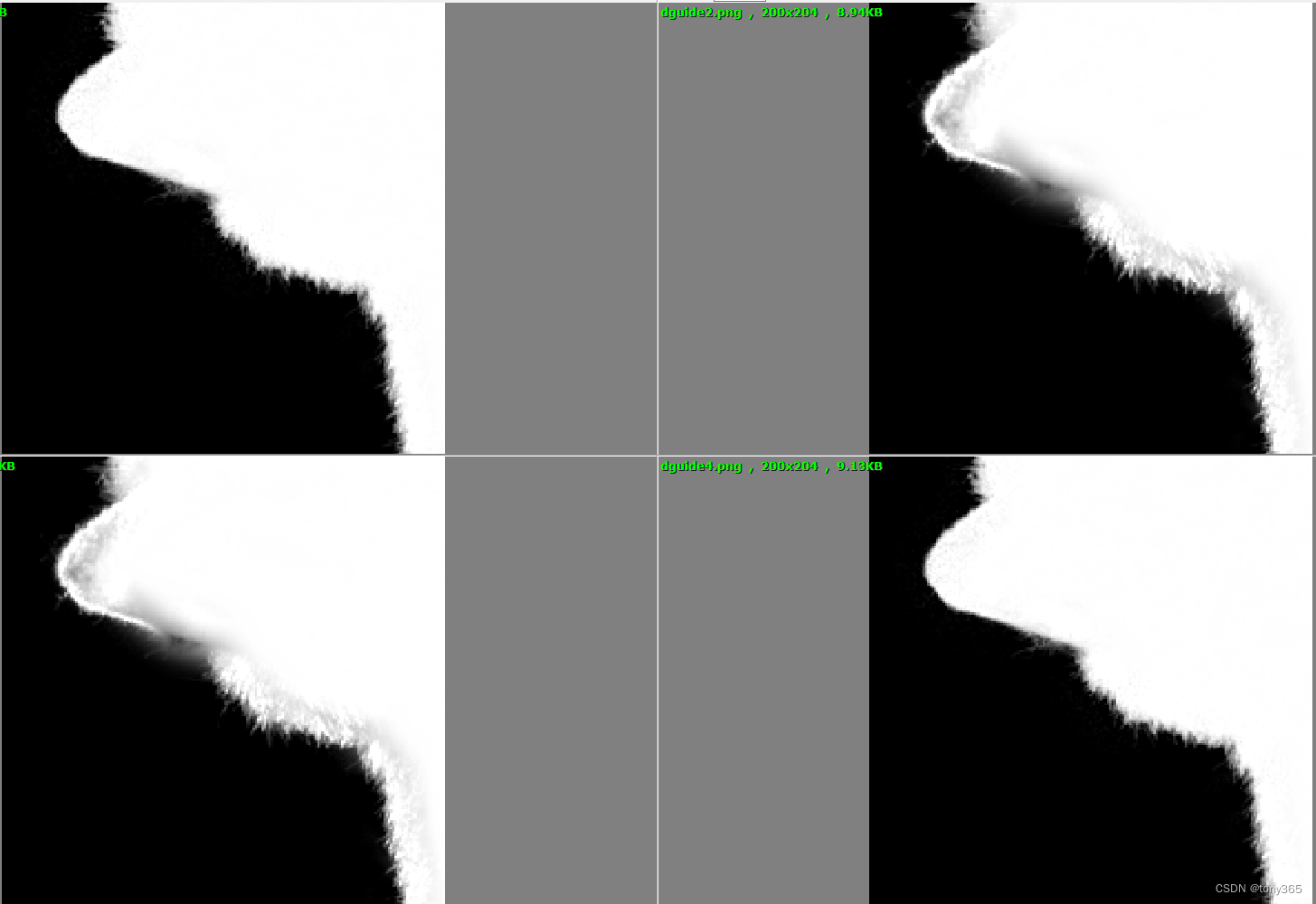
2.3 引导滤波应用,fathering
实验图像


实验code:
'''
导向滤波的应用: fathering
'''
def run_fathering():
file_I = r'D:\code\denoise\denoise_video\guide_filter_image\apply\c.png'
file_mask = r'D:\code\denoise\denoise_video\guide_filter_image\apply\d.png'
I = cv2.imread(file_I, 1)
I_gray = cv2.cvtColor(I, cv2.COLOR_BGR2GRAY)
input = cv2.imread(file_mask, 0)
kernel_size = 20
r = kernel_size // 2
eps1 = 0.000008 / 2
I = I.astype(np.float32)
I_gray = I_gray.astype(np.float32)
input = input.astype(np.float32) # 要转换为float类型
out1 = cv2.ximgproc.guidedFilter(I, input, r, (eps1 * 255 * 255))
out1 = np.clip(out1, 0, 255).astype(np.uint8)
cv2.imwrite(file_mask[:-4] + 'guide.png', out1)
out2 = cv2.ximgproc.guidedFilter(I_gray, input, r, (eps1 * 255 * 255))
out2 = np.clip(out2, 0, 255).astype(np.uint8)
cv2.imwrite(file_mask[:-4] + 'guide2.png', out2)
out3 = guided_filter(I_gray, input, kernel_size, eps1 * 255 * 255)
out3 = np.clip(out3, 0, 255).astype(np.uint8)
cv2.imwrite(file_mask[:-4] + 'guide3.png', out3)
print(I.shape, input.shape)
out4 = multi_dim_guide_filter(I, input, kernel_size, eps1 * 255 * 255)
out4 = np.clip(out4, 0, 255).astype(np.uint8)
cv2.imwrite(file_mask[:-4] + 'guide4.png', out4)
out1 是彩色引导图,opencv库
out2 是灰度引导图,opencv库
out3 是灰度引导图,
out4 是彩色引导图
结果 out1和out4 接近一致,效果好。 out2和out3一致,效果存在问题
2.3 引导滤波应用,图像增强
图片

引导滤波结果稍好一些
实验code:
if __name__ == '__main__':
file = r'D:\code\denoise\denoise_video\guide_filter_image\apply\e.png'
I = cv2.imread(file, 1)
I = I.astype(np.float32)
p = I
kernel_size = 20
r = kernel_size // 2
eps1 = 0.008 / 2
eps2 = 0.002 / 6
out0 = cv2.bilateralFilter(p, kernel_size, eps2 * 255 * 255, eps2 * 255 * 255) # 双边滤波
out1 = multi_dim_guide_filter(I, p, kernel_size, (eps1 * 255 * 255)) # 多通道guide
out2 = guided_filter(I, p, kernel_size, (eps1 * 255 * 255)) # 单通道各自guide
out3 = cv2.ximgproc.guidedFilter(I, p, r, (eps1 * 255 * 255)) # 多通道guide
out4 = (I - out0) * 2 + out0
out5 = (I - out1) * 2 + out1
out6 = (I - out2) * 2 + out2
out7 = (I - out3) * 2 + out3
out0 = np.clip(out0, 0, 255).astype(np.uint8)
out1 = np.clip(out1, 0, 255).astype(np.uint8)
out2 = np.clip(out2, 0, 255).astype(np.uint8)
out3 = np.clip(out3, 0, 255).astype(np.uint8) # out3 应该和 out1结果一致
out4 = np.clip(out4, 0, 255).astype(np.uint8)
out5 = np.clip(out5, 0, 255).astype(np.uint8)
out6 = np.clip(out6, 0, 255).astype(np.uint8) #
out7 = np.clip(out7, 0, 255).astype(np.uint8)
cv2.imwrite(file[:-4] + '0.png', out0)
cv2.imwrite(file[:-4] + '1.png', out1)
cv2.imwrite(file[:-4] + '2.png', out2)
cv2.imwrite(file[:-4] + '3.png', out3)
cv2.imwrite(file[:-4] + '4.png', out4)
cv2.imwrite(file[:-4] + '5.png', out5)
cv2.imwrite(file[:-4] + '6.png', out6)
cv2.imwrite(file[:-4] + '7.png', out7)
2.4 灰度图引导,和各自通道引导的效果差异
一致有个疑问,
- 分别用r,g,b引导各自通道的效果
- 利用灰度图引导各通道,比1滤波强度更大
- 利用彩色图引导
哪种效果更好呢? 实际使用的时候利用彩色图引导要相对复杂,计算量也更大。
def compare_1gray_3channel(im, r, eps):
"""
分通道进行和一起进行,结果完全一致
"""
out1 = guided_filter(im, im, r, eps)
im_gray = cv2.cvtColor(im, cv2.COLOR_RGB2GRAY)
out2 = np.zeros_like(out1)
out2[..., 0] = guided_filter(im_gray, im[..., 0], r, eps)
out2[..., 1] = guided_filter(im_gray, im[..., 1], r, eps)
out2[..., 2] = guided_filter(im_gray, im[..., 2], r, eps)
return out1, out2
def run_compare_gray_guide():
file = r'D:\code\denoise\denoise_video\guide_filter_image\compare\dd.png'
kernel_size = 17
r = kernel_size // 2
eps1 = 0.02 / 2
input = cv2.imread(file, 1)
input = input.astype(np.float32) # 要转换为float类型
out1, out2 = compare_1gray_3channel(input, r, (eps1 * 255 * 255))
out1 = np.clip(out1, 0, 255).astype(np.uint8)
out2 = np.clip(out2, 0, 255).astype(np.uint8)
cv2.imwrite(file[:-4] + '1.png', out1)
cv2.imwrite(file[:-4] + '2.png', out2)
out3 = cv2.ximgproc.guidedFilter(I, p, r, (eps1 * 255 * 255)) # 多通道
out3 = np.clip(out3, 0, 255).astype(np.uint8)
cv2.imwrite(file[:-4] + '3.png', out3)
2.5 不同参数设置影响
def parameter_tuning():
file = r'D:\code\denoise\denoise_video\guide_filter_image\paramter_tuning\dd.png'
kernel_size = 17
r = kernel_size // 2
eps1 = 0.02 / 2
input = cv2.imread(file, 1)
input = input.astype(np.float32) # 要转换为float类型
index = 0
for r in np.arange(3, 21, 4):
for eps in np.arange(0.000001, 0.00001, 0.000001):
eps1 = eps * 255 * 255
_, out2 = compare_1gray_3channel(input, r, eps1)
out2 = np.clip(out2, 0, 255).astype(np.uint8)
cv2.imwrite(file[:-4] + '{}.png'.format(index), out2)
index += 1
for eps in np.arange(0.2, 1, 0.1):
eps1 = eps * 255 * 255
_, out2 = compare_1gray_3channel(input, r, eps1)
out2 = np.clip(out2, 0, 255).astype(np.uint8)
cv2.imwrite(file[:-4] + '{}.png'.format(index), out2)
index += 1
3. 参考
[1]https://zhuanlan.zhihu.com/p/438206777 有详细解释 和 C++相关代码仓库
[2]https://blog.csdn.net/huixingshao/article/details/42834939 高级图像去雾算法的快速实现, guide filter用于去雾,解释的很清楚
[3]http://giantpandacv.com/academic/传统图像/一些有趣的图像算法/OpenCV图像处理专栏六 来自何凯明博士的暗通道去雾算法(CVPR 2009最佳论文)/去雾代码
[4]https://github.com/atilimcetin/guided-filter引导滤波C++code
![Python之FileNotFoundError: [Errno 2] No such file or directory问题处理](https://img-blog.csdnimg.cn/img_convert/5e96d62a80771794b2a1621eadbabb2a.png)