本文仅供学习使用
本文参考:
《机构运动微分几何学分析与综合》-王德伦、汪伟
《微分几何》吴大任
Ch02-1 平面机构离散运动鞍点综合
- 2 平面运动微分几何学
- 2.1 平面离散运动的矩阵表示
- 2.2 鞍点规划
2 平面运动微分几何学
平面连杆机构由连架杆、机架和连杆组成,连杆与机架之间通过二副连架杆,甚至多杆多副组合连接并约束连杆的运动,如R-R、P-R或者R-P等。在此约定二副连架杆第一个符号为连架杆连接机架的运动副(固定运动副),第二个为连架杆连接连杆的运动副(动运动副)符号。平面机构连杆上运动副元素的中心,如回转副R的中心点或者移动副P的中心直线,称为特征点或特征线;特征点或特征线随连杆运动在机架上的轨迹曲线(或者包络曲线),称为约束曲线。通常为圆(或直线族的包络圆)与直线,圆的曲率始终为常数而直线可看作圆的特例,即曲率始终为零。因此,对于平面四杆机构的运动综合,其本质是在连杆运动平面上确定出特征点或者特征线,其随连杆运动在固定平面上的轨迹曲线(近似)为圆或直线等简单规范图形。因此,平面连杆机构运动综合的基本问题是∶根据给定运动要求,确定运动刚体上的特征点或特征线及其位置。
平面离散运动几何学研究平面离散运动刚体或图形在固定坐标系中离散位移的几何性质,本书 离散运动或离散位移(轨迹)是指刚体或图形的平面分离位置或不连续位移(轨迹),即在固定坐标系中占据一些分离位置,对位置数量没有要求或限制。避免使用“有限分离位置”,因其容易理解为仅局限于少量(有限)位置数。平面离散运动几何学聚焦离散位置的整体几何性质,即与连架杆(或二副杆)及开式链约束曲线相比较的整体差异。经典的平面有限分离位置运动几何学,利用两位置转动极将有限分离位置转化为几何图形,讨论运动刚体上点在五个以下分离位置的几何性质,即相关点共圆或共线,而对于多位置的离散运动,尚在探索之中。本章采用鞍点规划方法定义平面离散曲线与圆或直线的差异,建立几何图形离散运动与离散轨迹上若干点的联系,由此讨论平面离散运动刚体上点及其在固定坐标系中的离散轨迹的整体性质,经典的有限分离位置几何学,讨论误差为零时的相关点共圆或共线。属于其少位置情形,故称平面离散运动几何学。
平面连杆机构运动综合,通常指离散运动综合,又可分为精确综合和近似综合;传统的有限分离位置运动几何学为精确综合提供理论依据,而近似综合或优化综合,综合解的存在性和算法收敛性缺乏足够的理论基础,往往只能限于个别问题个别对待。本章以平面离散运动几何学为基础,寻求运动刚体上的特殊点——鞍点,建立平面四杆机构运动综合模型。为区分现有机构运动综合方法,本书称其为机构离散运动鞍点综合,包括少位置和多位置,而精确综合仅为鞍点综合在少位置时的精确解。本章在讨论平面机构离散运动鞍点综合时,虽然平面机构的约束曲线仅为简单的直线和圆,为照应后文球面和空间机构运动鞍点综合方法统一论述,使读者阅读时有连贯性,仍采用约束曲线等相关术语。
2.1 平面离散运动的矩阵表示
对于平面运动刚体
Σ
∗
\Sigma *
Σ∗上一点
P
P
P,其在运动刚体坐标系
{
O
m
:
i
⃗
m
,
j
⃗
m
}
\{{{O}_{m}}:{{{\vec{i}}}_{m}},{{{\vec{j}}}_{m}}\}
{Om:im,jm}中的直角坐标为
(
x
p
m
,
y
p
m
)
({{x}_{pm}},{{y}_{pm}})
(xpm,ypm),用矢量表示为:
R
⃗
P
m
=
x
p
m
i
⃗
m
+
y
p
m
j
⃗
m
{{{\vec{R}}}_{Pm}}={{x}_{pm}}{{{\vec{i}}}_{m}}+{{y}_{pm}}{{{\vec{j}}}_{m}}
RPm=xpmim+ypmjm
在固定刚体
Σ
\Sigma
Σ上建立固定坐标系
{
O
f
:
i
⃗
f
,
j
⃗
f
}
\{{{O}_{f}}:{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\}
{Of:if,jf},运动刚体
Σ
∗
\Sigma *
Σ∗上点
P
(
x
p
m
,
y
p
m
)
P({{x}_{pm}},{{y}_{pm}})
P(xpm,ypm)的位移矢量为:
R
⃗
P
=
R
⃗
O
m
+
R
⃗
P
m
=
R
⃗
O
m
+
x
p
m
i
⃗
m
+
y
p
m
j
⃗
m
{{{\vec{R}}}_{P}}={{{\vec{R}}}_{Om}}+{{{\vec{R}}}_{Pm}}={{{\vec{R}}}_{Om}}+{{x}_{pm}}{{{\vec{i}}}_{m}}+{{y}_{pm}}{{{\vec{j}}}_{m}}
RP=ROm+RPm=ROm+xpmim+ypmjm
若将上式用坐标变换矩阵表示,为:
R
⃗
P
=
[
M
]
R
⃗
P
m
{{{\vec{R}}}_{P}}=[M]{{{\vec{R}}}_{Pm}}
RP=[M]RPm,有:
[
x
P
y
P
1
]
=
[
M
]
[
x
P
m
y
P
m
1
]
,
[
M
]
=
[
cos
γ
−
sin
γ
x
O
m
f
sin
γ
cos
γ
y
O
m
f
0
0
1
]
\left[ \begin{matrix} {{x}_{P}} \\ {{y}_{P}} \\ 1 \\ \end{matrix} \right]=[M]\left[ \begin{matrix} {{x}_{Pm}} \\ {{y}_{Pm}} \\ 1 \\ \end{matrix} \right],[M]=\left[ \begin{matrix} \cos \gamma & -\sin \gamma & {{x}_{Omf}} \\ \sin \gamma & \cos \gamma & {{y}_{Omf}} \\ 0 & 0 & 1 \\ \end{matrix} \right]
⎣⎡xPyP1⎦⎤=[M]⎣⎡xPmyPm1⎦⎤,[M]=⎣⎡cosγsinγ0−sinγcosγ0xOmfyOmf1⎦⎤
- 其中: [ M ] [M] [M]为刚体位移矩阵; ( x O m f , y O m f ) ({{x}_{Omf}},{{y}_{Omf}}) (xOmf,yOmf)为运动刚体 Σ ∗ \Sigma * Σ∗上运动坐标系 { O m : i ⃗ m , j ⃗ m } \{{{O}_{m}}:{{{\vec{i}}}_{m}},{{{\vec{j}}}_{m}}\} {Om:im,jm}的原点 O m {{O}_{m}} Om在固定坐标系 { O f : i ⃗ f , j ⃗ f } \{{{O}_{f}}:{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\} {Of:if,jf}中的坐标; γ \gamma γ为运动刚体 Σ ∗ \Sigma * Σ∗相对原点 O m {{O}_{m}} Om的转角。
运动刚体 Σ ∗ \Sigma * Σ∗相对于固定刚体 Σ \Sigma Σ的平面运动表示为:随参考点 O m {{O}_{m}} Om的线位移 ( x O m f , y O m f ) ({{x}_{Omf}},{{y}_{Omf}}) (xOmf,yOmf)和相对于该参考点 O m {{O}_{m}} Om的角位移 γ \gamma γ。
若这三个运动参数
(
x
O
m
f
,
y
O
m
f
,
γ
)
({{x}_{Omf}},{{y}_{Omf}},\gamma )
(xOmf,yOmf,γ)是连续的,表示运动刚体
Σ
∗
\Sigma *
Σ∗连续运动;若这三个参数是离散的,则表示运动刚体
Σ
∗
\Sigma *
Σ∗离散运动,仅为单个位置坐标和转角数值,如:
(
x
O
m
f
(
i
)
,
y
O
m
f
(
i
)
,
γ
(
i
)
)
(x_{Omf}^{(i)},y_{Omf}^{(i)},{{\gamma }^{(i)}})
(xOmf(i),yOmf(i),γ(i)),(上标括号中
i
i
i表示第
i
i
i个位置)。那么,运动刚体
Σ
∗
\Sigma *
Σ∗上任意点
P
(
x
p
m
,
y
p
m
)
P({{x}_{pm}},{{y}_{pm}})
P(xpm,ypm)在固定刚体
Σ
\Sigma
Σ下的固定坐标系
{
O
f
:
i
⃗
f
,
j
⃗
f
}
\{{{O}_{f}}:{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\}
{Of:if,jf}中的离散位移矢量
R
⃗
P
(
i
)
=
(
x
P
(
i
)
,
y
P
(
i
)
)
T
\vec{R}_{P}^{(i)}={{(x_{P}^{(i)},y_{P}^{(i)})}^{T}}
RP(i)=(xP(i),yP(i))T可表示为:
R
⃗
P
(
i
)
=
[
M
(
i
)
]
R
⃗
P
m
\vec{R}_{P}^{(i)}=[{{M}^{(i)}}]{{{\vec{R}}}_{Pm}}
RP(i)=[M(i)]RPm,即:
[
x
P
(
i
)
y
P
(
i
)
1
]
=
[
M
(
i
)
]
[
x
P
m
y
P
m
1
]
,
[
M
(
i
)
]
=
[
cos
γ
(
i
)
−
sin
γ
(
i
)
x
O
m
f
(
i
)
sin
γ
(
i
)
cos
γ
(
i
)
y
O
m
f
(
i
)
0
0
1
]
\left[ \begin{matrix} x_{P}^{(i)} \\ y_{P}^{(i)} \\ 1 \\ \end{matrix} \right]=[{{M}^{(i)}}]\left[ \begin{matrix} {{x}_{Pm}} \\ {{y}_{Pm}} \\ 1 \\ \end{matrix} \right],[{{M}^{(i)}}]=\left[ \begin{matrix} \cos {{\gamma }^{(i)}} & -\sin {{\gamma }^{(i)}} & x_{Omf}^{(i)} \\ \sin {{\gamma }^{(i)}} & \cos {{\gamma }^{(i)}} & y_{Omf}^{(i)} \\ 0 & 0 & 1 \\ \end{matrix} \right]
⎣⎢⎡xP(i)yP(i)1⎦⎥⎤=[M(i)]⎣⎡xPmyPm1⎦⎤,[M(i)]=⎣⎢⎡cosγ(i)sinγ(i)0−sinγ(i)cosγ(i)0xOmf(i)yOmf(i)1⎦⎥⎤
式中:
[
M
(
i
)
]
[{{M}^{(i)}}]
[M(i)]为刚体离散位移矩阵,对于一系列离散运动参数
(
x
O
m
f
(
i
)
,
y
O
m
f
(
i
)
,
γ
(
i
)
)
,
i
=
1
,
2
,
3
,
.
.
.
,
n
(x_{Omf}^{(i)},y_{Omf}^{(i)},{{\gamma }^{(i)}}),i=1,2,3,...,n
(xOmf(i),yOmf(i),γ(i)),i=1,2,3,...,n,可计算出运动刚体
Σ
∗
\Sigma *
Σ∗上任意点
P
(
x
p
m
,
y
p
m
)
P({{x}_{pm}},{{y}_{pm}})
P(xpm,ypm)在固定坐标系
{
O
f
:
i
⃗
f
,
j
⃗
f
}
\{{{O}_{f}}:{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\}
{Of:if,jf}中的一些列对应位置
(
x
P
(
i
)
,
y
P
(
i
)
)
,
i
=
1
,
2
,
3
,
.
.
.
,
n
(x_{P}^{(i)},y_{P}^{(i)}),i=1,2,3,...,n
(xP(i),yP(i)),i=1,2,3,...,n,或用矢量简化表示离散点集
{
R
⃗
P
(
i
)
}
\{\vec{R}_{P}^{(i)}\}
{RP(i)}
对于给定刚体其他运动像是,如运动刚体
Σ
∗
\Sigma *
Σ∗上两个参考点A和B在固定刚体
Σ
\Sigma
Σ下的固定坐标系
{
O
f
:
i
⃗
f
,
j
⃗
f
}
\{{{O}_{f}}:{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\}
{Of:if,jf}中的位移
(
x
A
,
y
A
)
({{x}_{A}},{{y}_{A}})
(xA,yA)和
(
x
B
,
y
B
)
({{x}_{B}},{{y}_{B}})
(xB,yB),以AB为直角边构造等腰直角三角形ABC,可得点
C
C
C位移
(
x
C
,
y
C
)
({{x}_{C}},{{y}_{C}})
(xC,yC)为:(此时A为直角三角形定点)
{
x
C
=
x
A
−
(
y
B
−
y
A
)
y
C
=
y
A
−
(
x
B
−
x
A
)
\left\{ \begin{matrix} {{x}_{C}}={{x}_{A}}-({{y}_{B}}-{{y}_{A}}) \\ {{y}_{C}}={{y}_{A}}-({{x}_{B}}-{{x}_{A}}) \\ \end{matrix} \right.
{xC=xA−(yB−yA)yC=yA−(xB−xA)
以直角三角形ABC初始位置建立固定坐标系,A为原点,AC为x轴,AB为Y轴,运动后三角形为A’B’C’,建立运动坐标系,A‘为原点,A‘C’为x’轴,A’B’为Y’轴,变换矩阵如上所示,简单推导即可
从而可通过运动刚体
Σ
∗
\Sigma *
Σ∗上三个点A、B、C在运动前后的位移列阵
(
A
I
)
({{A}_{I}})
(AI)、
(
B
I
)
({{B}_{I}})
(BI)、
(
C
I
)
({{C}_{I}})
(CI)和
(
A
I
I
)
({{A}_{II}})
(AII)、
(
B
I
I
)
({{B}_{II}})
(BII)、
(
C
I
I
)
({{C}_{II}})
(CII)来得到运动刚体的位移矩阵
[
M
]
[M]
[M]:
[
M
I
I
I
]
=
[
x
A
I
I
x
B
I
I
x
C
I
I
y
A
I
I
y
B
I
I
y
C
I
I
0
0
1
]
[
x
A
I
x
B
I
x
C
I
y
A
I
y
B
I
y
C
I
0
0
1
]
−
1
[{{M}_{I}}_{II}]=\left[ \begin{matrix} {{x}_{AII}} & {{x}_{BII}} & {{x}_{CII}} \\ {{y}_{AII}} & {{y}_{BII}} & {{y}_{CII}} \\ 0 & 0 & 1 \\ \end{matrix} \right]{{\left[ \begin{matrix} {{x}_{AI}} & {{x}_{BI}} & {{x}_{CI}} \\ {{y}_{AI}} & {{y}_{BI}} & {{y}_{CI}} \\ 0 & 0 & 1 \\ \end{matrix} \right]}^{-1}}
[MIII]=⎣⎡xAIIyAII0xBIIyBII0xCIIyCII1⎦⎤⎣⎡xAIyAI0xBIyBI0xCIyCI1⎦⎤−1
说明:
上式可理解为: [ [ P A I , P B I , P C I ] = [ x A I x B I x C I y A I y B I y C I z A I z B I z C I ] = [ M I I I ] [ x A I I x B I I x C I I y A I I y B I I y C I I z A I I z B I I z C I I ] = [ M I I I ] [ P A I I , P B I I , P C I I ] [[{{P}_{AI}},{{P}_{BI}},{{P}_{CI}}]=\left[ \begin{matrix} {{x}_{AI}} & {{x}_{BI}} & {{x}_{CI}} \\ {{y}_{AI}} & {{y}_{BI}} & {{y}_{CI}} \\ {{z}_{AI}} & {{z}_{BI}} & {{z}_{CI}} \\ \end{matrix} \right]=[{{M}_{I}}_{II}]\left[ \begin{matrix} {{x}_{AII}} & {{x}_{BII}} & {{x}_{CII}} \\ {{y}_{AII}} & {{y}_{BII}} & {{y}_{CII}} \\ {{z}_{AII}} & {{z}_{BII}} & {{z}_{CII}} \\ \end{matrix} \right]=[{{M}_{I}}_{II}][{{P}_{AII}},{{P}_{BII}},{{P}_{CII}}] [[PAI,PBI,PCI]=⎣⎡xAIyAIzAIxBIyBIzBIxCIyCIzCI⎦⎤=[MIII]⎣⎡xAIIyAIIzAIIxBIIyBIIzBIIxCIIyCIIzCII⎦⎤=[MIII][PAII,PBII,PCII]
令平面运动刚体上的运动坐标系
{
O
m
:
i
⃗
m
,
j
⃗
m
}
\{{{O}_{m}}:{{{\vec{i}}}_{m}},{{{\vec{j}}}_{m}}\}
{Om:im,jm}在刚体初始位置时与固定坐标系
{
O
f
:
i
⃗
f
,
j
⃗
f
}
\{{{O}_{f}}:{{{\vec{i}}}_{f}},{{{\vec{j}}}_{f}}\}
{Of:if,jf}重合,即此时的变换矩阵为单位矩阵
可利用上式得到刚体运动到任意位置时,运动刚体相对于固定刚体的位移矩阵。
由此可知,给定平面运动刚体 Σ ∗ \Sigma * Σ∗相对固定坐标系的离散位移和转角参数 ( x O m f ( i ) , y O m f ( i ) , γ ( i ) ) (x_{Omf}^{(i)},y_{Omf}^{(i)},{{\gamma }^{(i)}}) (xOmf(i),yOmf(i),γ(i)),便可确定运动刚体 Σ ∗ \Sigma * Σ∗的离散运动,再给定离散运动刚体上任意点 P ( x P m , y P m ) P({{x}_{Pm}},{{y}_{Pm}}) P(xPm,yPm),可计算出在固定坐标系中的离散轨迹点集 { R ⃗ P ( i ) } \{\vec{R}_{P}^{(i)}\} {RP(i)}。
2.2 鞍点规划
在连杆机构综合中,往往所得到的机构只能近似满足所要求的运动规律,这种 机构产生的运动与要求运动之间的理论误差称为结构误差。为了减小结构误差或按某种规律分布的误差,从结构误差规律的控制方式上区分,目前有两类综合方法,插值法和优化法
-
插值法:
插值法用函数 f b ( y , X ) {{f}_{b}}(y,X) fb(y,X)来逼近给定函数 f a ( y ) {{f}_{a}}(y) fa(y),其中有 n n n个结构参数X = ( x 1 , x 2 , . . . , x n ) T X={{({{x}_{1}},{{x}_{2}},...,{{x}_{n}})}^{T}} X=(x1,x2,...,xn)T(如机构中各个构件的尺度),一维设计变量y y y(如机构运动位置),有 k k k个插值点 ( y 1 , y 2 , . . . , y k ) ({{y}_{1}},{{y}_{2}},...,{{y}_{k}}) (y1,y2,...,yk),那么,在变化区间中 k k k个插值点上,需使得∶
F ( X ) = f b ( y i , X ) − f a ( y i ) = 0 , i = 1 , 2 , . . . , k F(X)={{f}_{b}}({{y}_{i}},X)-{{f}_{a}}({{y}_{i}})=0,i=1,2,...,k F(X)=fb(yi,X)−fa(yi)=0,i=1,2,...,k(可理解为误差函数)
上式是关于 x 1 , x 2 , . . . , x n {{x}_{1}},{{x}_{2}},...,{{x}_{n}} x1,x2,...,xn的联立方程组。当 k ≤ n k\le n k≤n时,有 n − k n-k n−k个结构参数可以任意选择,然后通过解这个方程组来确定机构的结构参数 X X X。
上述插值方法只能使插值点上结构误差为零,而在插值点外的其余点处结构误差不为零,而且误差有多大未知,事先也不能控制。在 k ≤ n k\le n k≤n情况下,为了减小最大的结构误差,应使插值点之间的结构误差的极大值与极小值趋于相等,这可通过改变插值点的位置分布来实现,如按切比雪夫多项式的零点来选择插值点,或调整插值点位置,直到极大值与极小值趋于相等,属于一维最佳一致逼近。 -
优化法:
当 k > n k>n k>n时,则机构综合问题只能采用优化方法求解,即寻求一组或几组机构的结构参数 X X X,使得其的结构误差平方和为最小∶
F ( X ) = ∑ i = 1 k [ f b ( y i , X ) − f a ( y i ) ] 2 F(X)=\sum\limits_{i=1}^{k}{{{[{{f}_{b}}({{y}_{i}},X)-{{f}_{a}}({{y}_{i}})]}^{2}}} F(X)=i=1∑k[fb(yi,X)−fa(yi)]2
这是目前机构优化综合常见的目标函数,即最小二乘法,属于最佳平方逼近。对于简单的线性问题,其解算速度快,结果稳定;而对于非线性问题,最优解与初始值往往只有量的区别,而没有质的区别。主要原因是∶结构误差评定不够客观和统一,如上述误差模型建立在两函数对应点之间的距离(误差),实际运算时对应点难以定义,实现相同运动可以有多种方式与参数,而距离又不是法向,难以统一,不能体现两函数之间的差异,如一平面曲线与一圆,需要准确定义两曲线间的误差才能比较。同时,设计变量冗余,机构结构误差与结构参数(尺度)之间都是非线性函数,而且机构尺度以铰链点坐标的形式表示,使设计变量出现冗余,目标函数下降不能真实体现设计变量变化的影响,容易导致优化算法不收敛。所以,目前的机构运动综合优化方法往往对初始值依赖程度非常高,以至于成为具体问题具体分析,难以形成有效实用的综合方法。
机构运动综合的实质是在运动刚体上寻找特征点或特征直线,使其在固定坐标系中的轨迹与连架杆(或开式链)的约束曲线或约束曲面差异越小越好,上述模型也不过是通过已有机构的位移方程或几何约束方程体现这种差异。为此,本书采用曲线、曲面的逼近与拟合方式来比较运动刚体上点(或直线)的运动轨迹与连架杆(或开式链)约束曲线(曲面)的差异,将机构运动综合问题转化为寻求运动刚体上特征点与线的运动几何学问题。平面机构的连架杆(或开式链)及其对应的约束曲线,如圆和直线,在第1章已经介绍,而球面与空间机构的连架杆(或开式链)及其对应的约束曲线与约束曲面,将在第3章论述。
假定运动刚体上点(或直线)在固定(或相对固定)坐标系中的运动函数(如轨迹曲线或曲面)为
f
a
(
y
)
{{f}_{a}}(y)
fa(y),选定连架杆(或开式链)的约束函数(曲线或曲面)为
f
b
(
y
,
X
)
{{f}_{b}}(y,X)
fb(y,X),二者相比较时,首先定义
f
b
(
y
,
X
)
{{f}_{b}}(y,X)
fb(y,X)与
f
a
(
y
)
{{f}_{a}}(y)
fa(y)的法向误差函数
F
(
X
,
y
)
F(X,y)
F(X,y)。显然,对于给定结构参数
X
∈
R
n
X\in {{R}^{n}}
X∈Rn的约束函数
f
b
(
y
,
X
)
{{f}_{b}}(y,X)
fb(y,X),随着设计变量
y
∈
R
y\in R
y∈R取不同数值,
f
b
(
y
,
X
)
{{f}_{b}}(y,X)
fb(y,X)的函数值变化,误差函数
F
(
X
,
y
)
F(X,y)
F(X,y)也有不同数值;那么,评价
f
b
(
y
,
X
)
{{f}_{b}}(y,X)
fb(y,X)与
f
a
(
y
)
{{f}_{a}}(y)
fa(y)的接近程度应取其误差最大的点
y
∗
y*
y∗,即
F
(
X
,
y
∗
)
=
∥
f
b
(
y
∗
,
X
)
−
f
a
(
y
)
∥
∞
F(X,y*)={{\left\| {{f}_{b}}(y*,X)-{{f}_{a}}(y) \right\|}_{\infty }}
F(X,y∗)=∥fb(y∗,X)−fa(y)∥∞。同样,不同的结构参数
X
∈
R
n
X\in {{R}^{n}}
X∈Rn使约束函数
f
b
(
y
,
X
)
{{f}_{b}}(y,X)
fb(y,X)变化,也导致误差函数
F
(
X
,
y
)
F(X,y)
F(X,y)变化,机构运动综合的目标无疑是寻求能够使误差函数
F
(
X
,
y
)
F(X,y)
F(X,y)取得极小值的结构参数
X
∗
X*
X∗,从而有∶
F
(
X
∗
,
y
)
≤
F
(
X
∗
,
y
∗
)
≤
F
(
X
,
y
∗
)
F(X*,y)\le F(X*,y*)\le F(X,y*)
F(X∗,y)≤F(X∗,y∗)≤F(X,y∗)
上述内容按数学规划的一般提法可描述为∶若一类优化设计变量
X
=
(
x
1
,
x
2
,
.
.
.
,
x
n
)
T
X={{({{x}_{1}},{{x}_{2}},...,{{x}_{n}})}^{T}}
X=(x1,x2,...,xn)T,
y
∈
=
(
y
1
,
y
2
,
.
.
.
,
y
k
)
T
y\in={{({{y}_{1}},{{y}_{2}},...,{{y}_{k}})}^{T}}
y∈=(y1,y2,...,yk)T,
X
∈
R
n
X\in {{R}^{n}}
X∈Rn,
y
∈
R
k
y\in {{R}^{k}}
y∈Rk,且
F
(
X
,
y
)
F(X,y)
F(X,y)为
R
k
+
n
{{R}^{k+n}}
Rk+n空间中的实函数,若要使得函数
F
(
X
,
y
)
F(X,y)
F(X,y)在
(
X
∗
,
y
∗
)
(X*,y*)
(X∗,y∗)处取得最优质的,即表示为:
{
min
X
max
y
F
(
X
,
y
)
s
.
t
.
g
i
(
X
)
≤
0
,
i
=
1
,
2
,
.
.
,
p
h
j
(
X
)
≤
0
,
j
=
1
,
2
,
.
.
,
m
\left\{ \begin{matrix} \underset{X}{\mathop{\min }}\,\underset{y}{\mathop{\max }}\,F(X,y) \\ \begin{matrix} s.t. & \begin{matrix} {{g}_{i}}(X)\le 0, & i=1,2,..,p \\ \end{matrix} \\ \end{matrix} \\ \begin{matrix} {} & \begin{matrix} {{h}_{j}}(X)\le 0, & j=1,2,..,m \\ \end{matrix} \\ \end{matrix} \\ \end{matrix} \right.
⎩⎪⎨⎪⎧XminymaxF(X,y)s.t.gi(X)≤0,i=1,2,..,phj(X)≤0,j=1,2,..,m
式中,
F
(
X
,
y
)
F(X,y)
F(X,y)为目标函数,
g
i
(
X
)
{{g}_{i}}(X)
gi(X)和
h
j
(
X
)
{{h}_{j}}(X)
hj(X)为不等式约束函数,
X
=
(
x
1
,
x
2
,
.
.
.
,
x
n
)
T
X={{({{x}_{1}},{{x}_{2}},...,{{x}_{n}})}^{T}}
X=(x1,x2,...,xn)T,
y
=
(
y
1
,
y
2
,
.
.
.
,
y
k
)
T
y={{({{y}_{1}},{{y}_{2}},...,{{y}_{k}})}^{T}}
y=(y1,y2,...,yk)T为设计变量,集合
G
=
{
(
X
,
y
)
∣
g
i
(
X
)
≤
0
,
i
=
1
,
2
,
.
.
,
p
;
h
j
(
X
)
≤
0
,
j
=
1
,
2
,
.
.
,
m
}
G=\{(X,y)|{{g}_{i}}(X)\le 0,i=1,2,..,p;{{h}_{j}}(X)\le 0,j=1,2,..,m\}
G={(X,y)∣gi(X)≤0,i=1,2,..,p;hj(X)≤0,j=1,2,..,m}为鞍点规划的可行集(或可行域)。几何意义是对于变量
y
y
y,目标函数
F
(
X
,
y
)
F(X,y)
F(X,y)取得极大值,而对于变量
X
X
X,目标函数
F
(
X
,
y
)
F(X,y)
F(X,y)又取得极小值,形象比喻为马鞍形状的点,故称鞍点规划,在曲面微分几何学中定义为双曲点。鞍点规划属于数学规划的一种,有时称为“极大值的极小化”(minmax)或“极小值的极大化”(maxmin),也有直接称其极小极大问题或极大极小问题。其实质是一维切比雪夫逼近理论在多维空间中的推广。鞍点规划的理论与方法,如解的存在性和充分必要条件等,《鞍点规划与形位误差》-刘健有详细论述,以其为理论基础所建立的形位误差评定方法已经得到广泛应用。
本书应用鞍点规划讨论刚体平面、球面和空间离散运动几何学,建立了机构运动鞍点综合模型,把少位置的精确点综合作为多位置近似综合的特殊情况处理——精确解而已,有关内容见本书相关章节。
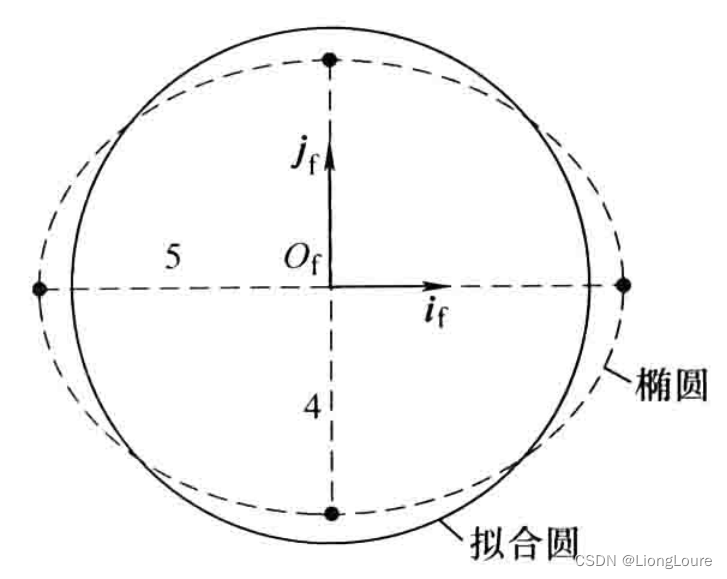
例2-1: 已知一平面曲线为椭圆,其方程为 x = 5 cos θ , y = 4 sin θ , θ ∈ [ 0 , 2 π ) x=5\cos \theta ,y=4\sin \theta ,\theta \in [0,2\pi ) x=5cosθ,y=4sinθ,θ∈[0,2π),试建立鞍点规划模型求解最佳拟合圆。
解∶由鞍点规划模型可知,被拟合曲线(椭圆)函数为 f a ( θ ) {{f}_{a}}(\theta ) fa(θ),而拟合圆为函数 f b ( X , θ ) {{f}_{b}}(X,\theta ) fb(X,θ),设计变量为∶ X = ( R C , r ) T = ( x C , y C , r ) T X={{({{R}_{C}},r)}^{T}}={{({{x}_{C}},{{y}_{C}},r)}^{T}} X=(RC,r)T=(xC,yC,r)T,即拟合圆的圆心坐标 ( x C , y C ) ({{x}_{C}},{{y}_{C}}) (xC,yC)和半径 r , θ r,\theta r,θ为椭圆上点的位置参数(也可取椭圆弧长),目标函数定义为椭圆与拟合圆之间的法向误差,即拟合圆的径向误差 F ( X , θ ) = { ∣ ( 5 cos θ − x C ) 2 + ( 4 sin θ − y C ) 2 − r ∣ } , θ ∈ [ 0 , 2 π ) F(X,\theta )=\{\left| \sqrt{{{(5\cos \theta -{{x}_{C}})}^{2}}+{{(4\sin \theta -{{y}_{C}})}^{2}}}-r \right|\},\theta \in [0,2\pi ) F(X,θ)={∣∣∣∣(5cosθ−xC)2+(4sinθ−yC)2−r∣∣∣∣},θ∈[0,2π)。椭圆的鞍点拟合圆如下所示
其误差评定的鞍点规划模型为∶
{ min X max θ F ( X , θ ) = min X max θ { ∣ ( 5 cos θ − x C ) 2 + ( 4 sin θ − y C ) 2 − r ∣ } s . t . θ ∈ [ 0 , 2 π ) , r ∈ ( 0 , + ∞ ) X = ( x C , y C , r ) T \left\{ \begin{matrix} \underset{X}{\mathop{\min }}\,\underset{\theta }{\mathop{\max }}\,F(X,\theta )=\underset{X}{\mathop{\min }}\,\underset{\theta }{\mathop{\max }}\,\{\left| \sqrt{{{(5\cos \theta -{{x}_{C}})}^{2}}+{{(4\sin \theta -{{y}_{C}})}^{2}}}-r \right|\} \\ \begin{matrix} s.t. & \begin{matrix} \theta \in [0,2\pi ), & r\in (0,+\infty ) \\ \end{matrix} \\ \end{matrix} \\ \begin{matrix} {} & \begin{matrix} X={{({{x}_{C}},{{y}_{C}},r)}^{T}} & {} \\ \end{matrix} \\ \end{matrix} \\ \end{matrix} \right. ⎩⎪⎪⎨⎪⎪⎧XminθmaxF(X,θ)=Xminθmax{∣∣∣∣(5cosθ−xC)2+(4sinθ−yC)2−r∣∣∣∣}s.t.θ∈[0,2π),r∈(0,+∞)X=(xC,yC,r)T
当变量 θ \theta θ分别在 θ ∗ = 0 , π / 2 , π , 3 π / 2 \theta *=0,\pi /2,\pi ,3\pi /2 θ∗=0,π/2,π,3π/2时,目标函数取得极值 F ( X , θ ∗ ) F(X,\theta *) F(X,θ∗),且有∶
F ( X , θ ∗ ) = { ∣ ( 5 − x C ) 2 + y C 2 − r ∣ , ∣ x C 2 + ( 4 − y C ) 2 − r ∣ , ∣ ( − 5 − x C ) 2 + y C 2 − r ∣ , ∣ x C 2 + ( − 4 − y C ) 2 − r ∣ } F(X,\theta *)=\{\left| \sqrt{{{(5-{{x}_{C}})}^{2}}+{{y}_{C}}^{2}}-r \right|,\left| \sqrt{{{x}_{C}}^{2}+{{(4-{{y}_{C}})}^{2}}}-r \right|,\left| \sqrt{{{(-5-{{x}_{C}})}^{2}}+{{y}_{C}}^{2}}-r \right|,\left| \sqrt{{{x}_{C}}^{2}+{{(-4-{{y}_{C}})}^{2}}}-r \right|\} F(X,θ∗)={∣∣∣∣(5−xC)2+yC2−r∣∣∣∣,∣∣∣∣xC2+(4−yC)2−r∣∣∣∣,∣∣∣∣(−5−xC)2+yC2−r∣∣∣∣,∣∣∣∣xC2+(−4−yC)2−r∣∣∣∣}
当设计变量 X = ( x C , y C , r ) T X={{({{x}_{C}},{{y}_{C}},r)}^{T}} X=(xC,yC,r)T取某些值使得 F ( X , θ ∗ ) F(X,\theta *) F(X,θ∗)达到最小时,只有在上述四个极值点处的极值都相等时方可实现,故有∶
∣ ( 5 − x C ) 2 + y C 2 − r ∣ = ∣ x C 2 + ( 4 − y C ) 2 − r ∣ = ∣ ( − 5 − x C ) 2 + y C 2 − r ∣ = ∣ x C 2 + ( − 4 − y C ) 2 − r ∣ \left| \sqrt{{{(5-{{x}_{C}})}^{2}}+{{y}_{C}}^{2}}-r \right|=\left| \sqrt{{{x}_{C}}^{2}+{{(4-{{y}_{C}})}^{2}}}-r \right|=\left| \sqrt{{{(-5-{{x}_{C}})}^{2}}+{{y}_{C}}^{2}}-r \right|=\left| \sqrt{{{x}_{C}}^{2}+{{(-4-{{y}_{C}})}^{2}}}-r \right| ∣∣∣∣(5−xC)2+yC2−r∣∣∣∣=∣∣∣∣xC2+(4−yC)2−r∣∣∣∣=∣∣∣∣(−5−xC)2+yC2−r∣∣∣∣=∣∣∣∣xC2+(−4−yC)2−r∣∣∣∣
从而解得: x C = 0 , y C = 0 , r = 4.5 {{x}_{C}}=0,{{y}_{C}}=0,r=4.5 xC=0,yC=0,r=4.5
- 当采用数值求解时,被拟合曲线(椭圆)为给定离散点集 { ( x P ( i ) , y P ( i ) ) T } , i = 1 , . . . , n \{{{(x_{P}^{(i)},y_{P}^{(i)})}^{T}}\},i=1,...,n {(xP(i),yP(i))T},i=1,...,n, n n n为离散点个数,鞍点规划模型改写为∶
{ Δ = min X max 1 ≤ i ≤ N { ∣ ( x P ( i ) − x C ) 2 + ( y P ( i ) − y C ) 2 − r ∣ } s . t . r ∈ ( 0 , + ∞ ) X = ( x C , y C , r ) T \left\{ \begin{matrix} \Delta =\underset{X}{\mathop{\min }}\,\underset{1\le i\le N}{\mathop{\max }}\,\{\left| \sqrt{{{(x_{P}^{(i)}-{{x}_{C}})}^{2}}+{{(y_{P}^{(i)}-{{y}_{C}})}^{2}}}-r \right|\} \\ \begin{matrix} s.t. & \begin{matrix} r\in (0,+\infty ) & {} \\ \end{matrix} \\ \end{matrix} \\ \begin{matrix} {} & \begin{matrix} X={{({{x}_{C}},{{y}_{C}},r)}^{T}} & {} \\ \end{matrix} \\ \end{matrix} \\ \end{matrix} \right. ⎩⎪⎪⎨⎪⎪⎧Δ=Xmin1≤i≤Nmax{∣∣∣∣(xP(i)−xC)2+(yP(i)−yC)2−r∣∣∣∣}s.t.r∈(0,+∞)X=(xC,yC,r)T在求解时设计变量 X = ( x C , y C , r ) T X={{({{x}_{C}},{{y}_{C}},r)}^{T}} X=(xC,yC,r)T需要赋予初始值,可采用最小二乘法确定优化变量的初始值。对于本例中所给定的椭圆,当所给椭圆上离散点 f a ( θ i ) = { ( x P ( i ) , y P ( i ) ) T } {{f}_{a}}({{\theta }_{i}})=\{{{(x_{P}^{(i)},y_{P}^{(i)})}^{T}}\} fa(θi)={(xP(i),yP(i))T}包含椭圆长轴和短轴上的四个顶点时,离散点个数多少对拟合圆求解的精度没有影响,必然等于解析解。反之,求解精度则取决于四个顶点的精确程度,也与离散点个数无关,这也是用鞍点规划与最小二乘法评定模型的区别之一。