前言
此前出了目标改进算法专栏,但是对于应用于什么场景,需要什么改进方法对应与自己的应用场景有效果,并且多少改进点能发什么水平的文章,为解决大家的困惑,此系列文章旨在给大家解读最新目标检测算法论文,帮助大家解答疑惑。解读的系列文章,本人已进行创新点代码复现,有需要的朋友可关注私信我。
一、摘要
针对在复杂背景下的遥感小目标与周围场景因特征相似度高而导致的小目标检测正确率低的问题,提出一种基于残差网络优化的航拍小目标检测算法。首先,在YOLOv5网络中引入改进的SE_ECSP模块,减少网络计算参数的同时,使得小目标的特征权重在网络在卷积池化过程中得以提升;然后,在网络的Prediction中添加一个160×160的检测层,对小目标的细节信息进行局部放大与提取;最后,选取CIoU和NMS作为损失函数对同一网格中的候选框进行多次循环结构的判断和筛选,从而有效避免小目标的漏检问题。实验结果表明,改进后的网络用于遥感小目标检测的查准率为85.12%,损失函数值为0.04841,相比改进前的网络检测精度和鲁棒性得以提升。
二、网络模型及核心创新点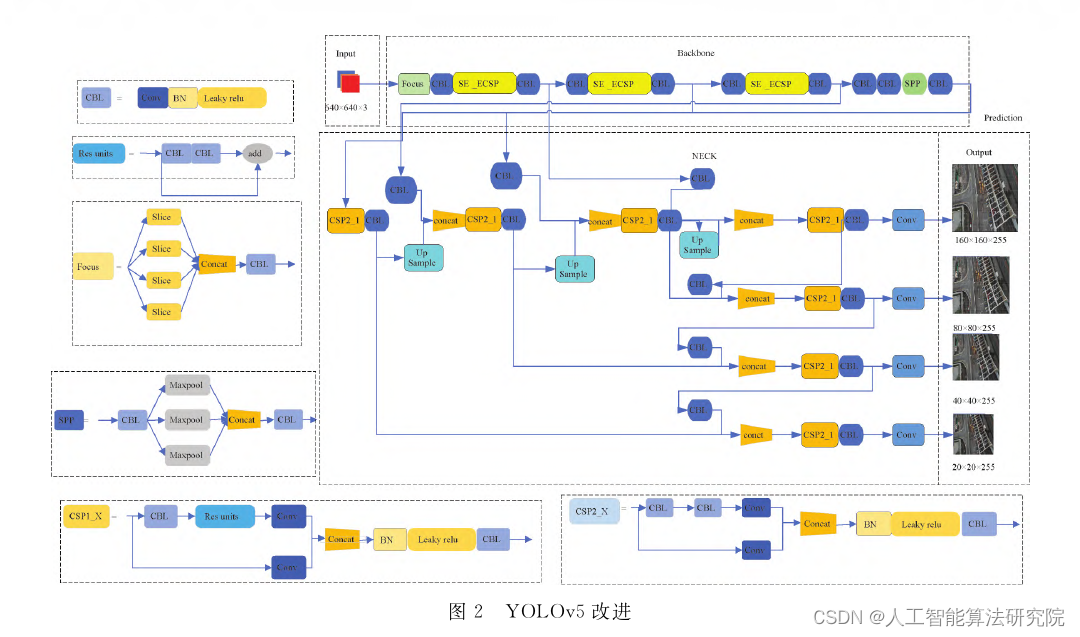
1. 结合SENet的CSP模块改进
2. 面向小目标感受野优化的检测层改进
3. 基于检测层的边界框回归损失函数改进
三、应用数据集
本文以小车辆目标为主要研究对象,实验使用了开源VisDrone2019数据集,该数据集由中国天津大学机器学习和数据挖掘实验室的AISKVE YE团队收集,场景丰富多样,可有效验证网络性能。
四、实验效果(部分展示)
1. 多种算法的对比实验如下表所示,可以看出,本文方法相较于YOLOv5原模型以及当前流行的YOLOv4、SSD、EffcientNets检测算法在Precision和损失函数方面均有了不错的提升,进一步证明了本文所提方法的有效性。
2. 下图所示,可以看出改进网络相比于其他网络的Loss值下降的趋势更快,,损失函数值更小,可以更好的收敛。

3.为了增加实验的严谨性,分别对密集小目标、小目标被遮挡、复杂场景进行对照检测,采用YOLOv5网络和本文改进后的算法进行对比,如下图所示。
五、实验结论
本文通过在YOLOv5网络中引入SE_ECSP模块使得网络在对小目标的特征通道重新标定,加大对重要特征的权重,同时采用大量的1*1卷积块,对特征通道数进行整合,然后在网络中添加一个小目标检测层,使得网络可以更进一步提取小目标的特征,进而提升遥感图像中检测小目标的正确率,而后通过将网络的损失函数改为CioU与NMS,对同一网格进行多次筛选,有效减缓了在检测小目标过程中检测正确率低的问题。
六、投稿期刊介绍
注:论文原文出自李壮飞、杨风暴、郝岳强;一种基于残差网络优化的航拍小目标检测算法;国外电子测量技术.
解读的系列文章,本人已进行创新点代码复现,有需要的朋友可关注下面公众号,私信我。

![[Nacos][Rancher][微服务] 容器化Docker部署的Nacos拒接连接](https://img-blog.csdnimg.cn/e0b41c4e85584a4fbaa97d8f1b20c156.png)