机械人开发五--ROS基本概念的程序实现
- 一、开发工具
- 二、RoboWare Studio的基本使用
- 2.1 软件启动
- 2.2 修改界面语言
- 2.3 使用
- 2.4 编译文件
- 2.5 卸载
- 三、话题通信
- 四、话题的代码编写
- 4.1 发布端
- 4.2 接收端
- 4.3 测试
- 五、自定义消息
- 5.1 自定义消息类型
- 5.2 自定义消息发布端
- 5.3 自定义消息接收端
- 5.4 测试
一、开发工具
- ubuntu18.04
- RoboWare Studio
关于RoboWare Studio的下载,这里给出安装包的下载链接:
链接:https://pan.baidu.com/s/1ypCs18v26PW8Of3aOunDow
提取码:v2se
安装前提:
- 操作系统为ubuntu
- 已完成ROS系统的安装配置(前面的文章已经讲了)
- 安装 python-pip: sudo apt-get install python-pip
下载后将其移动到虚拟机内,打开文件系统,双击安装包就行了,遇到提示就按 Esc 就行了,CSDN上安装教程有很多,这里就不多赘述了。
至于我问什么要安装这个IDE呢?最最主要的原因就是,他可以自动修改CMakeList.txt与其他配置文件的设置,非常方便。
二、RoboWare Studio的基本使用
2.1 软件启动
下载完成后在命令行输入:
roboware-studio
启动软件
2.2 修改界面语言
① 根据如下图所示,打开对应语言设置文件。

② 将 "locale":"en" ,修改为 "locale":"zh-CN"
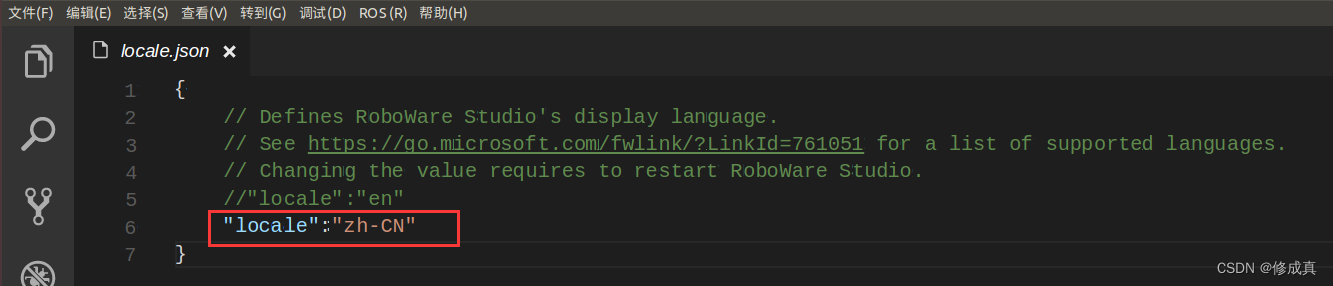
保存并重启系统,可以看到语言已经修改为中文了。
2.3 使用
① 点击 文件,可新建工作区。
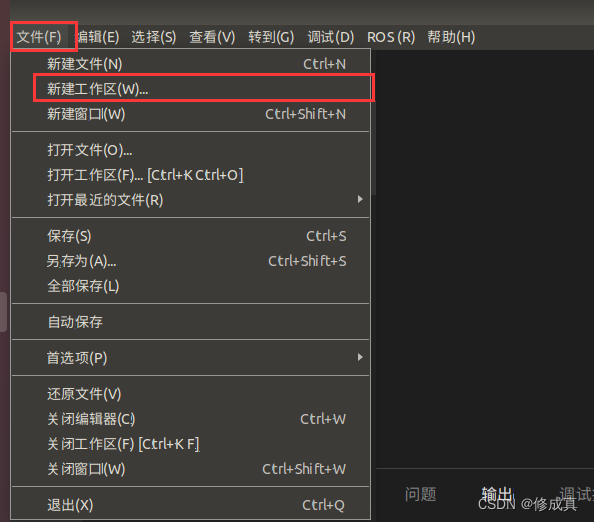
我这边已经有工作区了,就是上几节创建的 catkin_ws,选择打开工作区就行了。
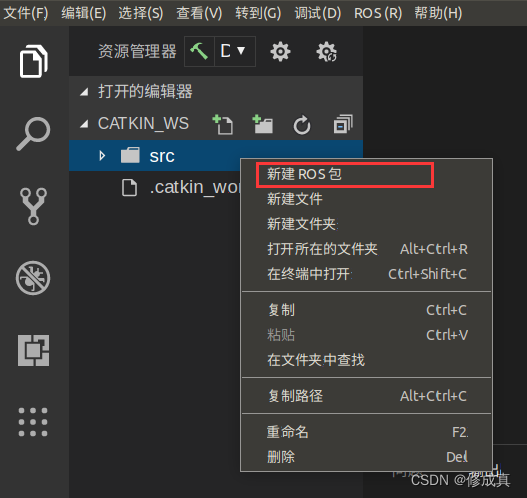
② 右击工作区下的 src,可以选择 新建ROS包。
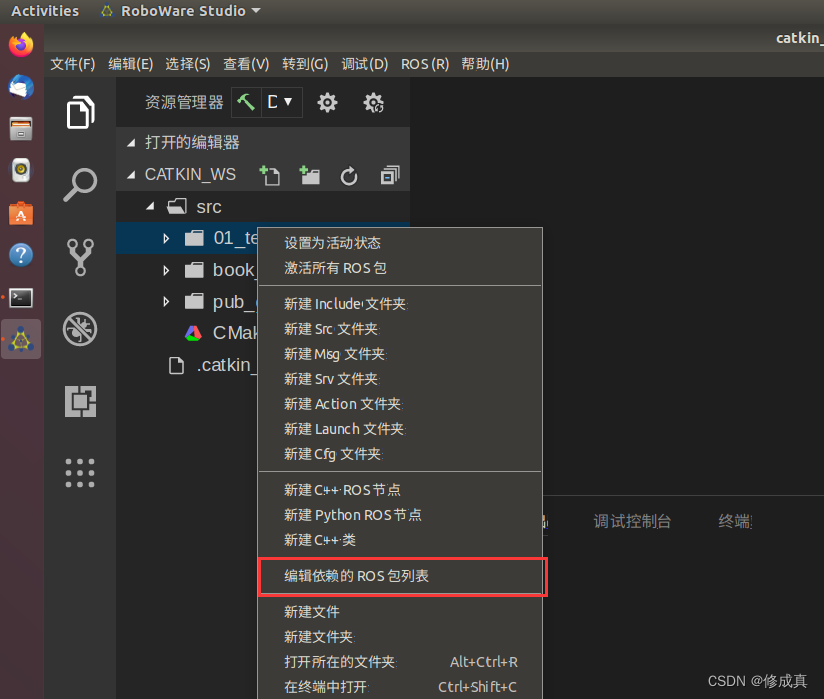
③ 右击 新建的ROS包,可以为其添加依赖。

④ 右击新建包ROS 目录下 src 目录,可以新建CPP文件
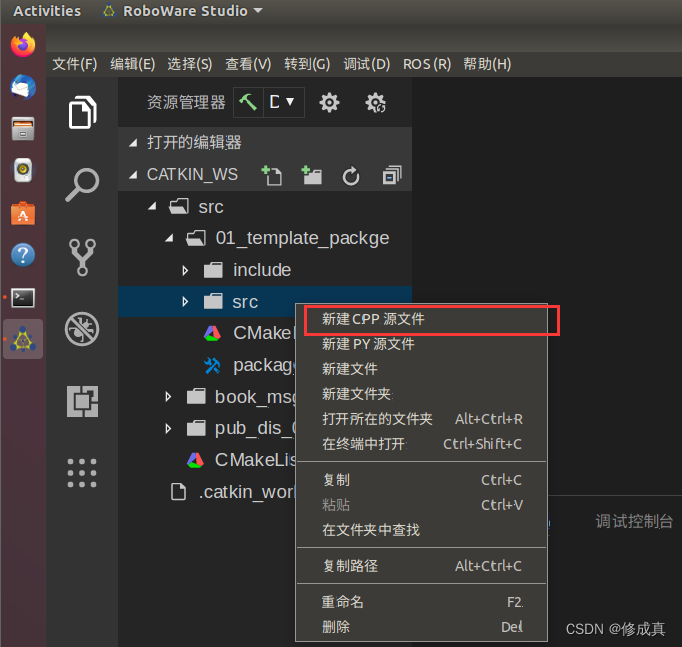
新建的文件后,会弹出列表,选择 加入新的可执行文件中,IDE工具则会根据CPP文件名创建一个与之同名的可执行文件(ROS节点),此时CMakeList.txt文件会自动更新。

2.4 编译文件
① 修改上面的编译设置为 Debug。
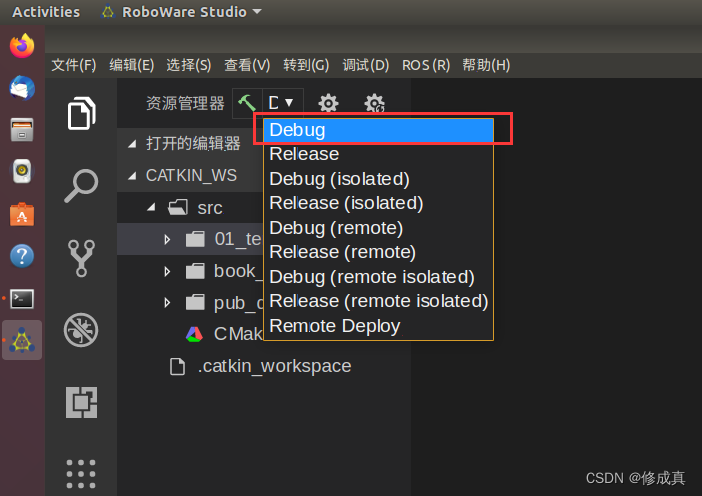
② 点击小锤子,进行编译,效果与catkin_make一样。
2.5 卸载
命令行输入:
sudo apt-get remove roboware-studio
可以卸载软件。
三、话题通信
话题通信是ROS节点通信方式的一种,它是一对多、异步的通信,方式在上一节的内容讲过了。
这里不过赘述。
这里讲一下一些话题命令。
rostopic echo:打印话题信息rostopic hz: 话题频率rostopic info:话题信息rostopic list:列举话题rostopic pub:往话题输入信息rostopic bw: 话题带宽rostopic find:从数据类型寻找话题rostopic type:查看话题的数据类型
四、话题的代码编写
上几节讲了节点的概念,在ROS中,最小的进程单位称为节点(Node)。每个节点都是一个可执行文件,可以是C++或Python文件,下面这里用C++代码来实现节点。
4.1 发布端
打开编辑器,右击ROS包目录下的src,创建 PubForBeginner.cpp,内容如下:
#include "ros/ros.h"
#include "std_msgs/String.h"
int main(int argc, char **argv)
{
//initial and name node
ros::init(argc, argv, "publisher");
//create nodehandle
ros::NodeHandle nh;
//create publisher
ros::Publisher simplepub = nh.advertise<std_msgs::String>("string_topic",100);
ros::Rate rate(10);
//message for publish
std_msgs::String pubinfo;
pubinfo.data = "Hello, I'm Publisher!";
while(ros::ok())
{
simplepub.publish(pubinfo);
}
return 0;
}
- ros::init :创建 ros 节点,并命名为 publisher。
- ros::NodeHandle :创建 节点的句柄。
- ros::Publisher simplepub:创建发布者,并在主题名为
string_topic的主题上发布类型为<std_msgs::String>的消息。 - std_msgs::String pubinfo; 定义的消息类型。
- simplepub.publish(pubinfo); 发布数据
4.2 接收端
打开编辑器,右击ROS包目录下的src,创建 SubForBeginner.cpp,内容如下:
#include "ros/ros.h"
#include "std_msgs/String.h"
using namespace std;
void subCallback(const std_msgs::String& submsg)
{
string subinfo;
subinfo = submsg.data;
ROS_INFO("The message subscribed is: %s",subinfo.c_str());
}
int main(int argc,char** argv)
{
//initial and name node
ros::init(argc,argv,"subscriber");
//create nodehandle
ros::NodeHandle nh;
//create subscriber
ros::Subscriber sub = nh.subscribe("string_topic",1000,&subCallback);
ros::spin();
return 0;
}
- subCallback:订阅节点的回调函数,对接收的消息进行打印处理。
- ros::Subscriber sub :订阅 主题名为
string_topic上的消息,接收到消息后调用回调函数处理。 - ros::spin(); :ROS消息的回调处理函数,程序运行到这里后不再往下处理。
4.3 测试
① 首先点击编译。
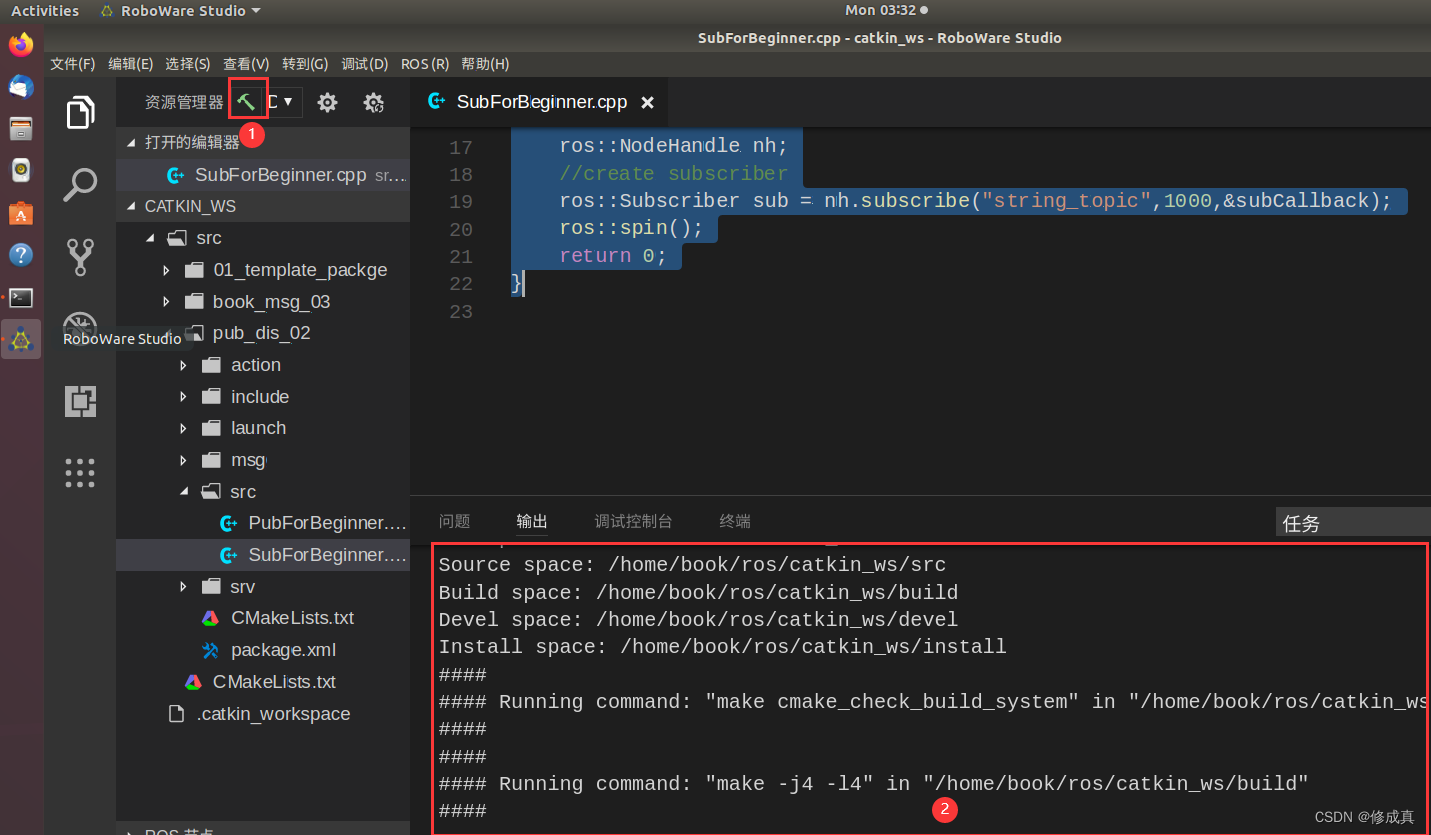
编译失败,可以在 ②位置处寻找问题,如果是语法问题,编译器里会使用 红线 勾出。
② 打开一个终端输入:
roscore
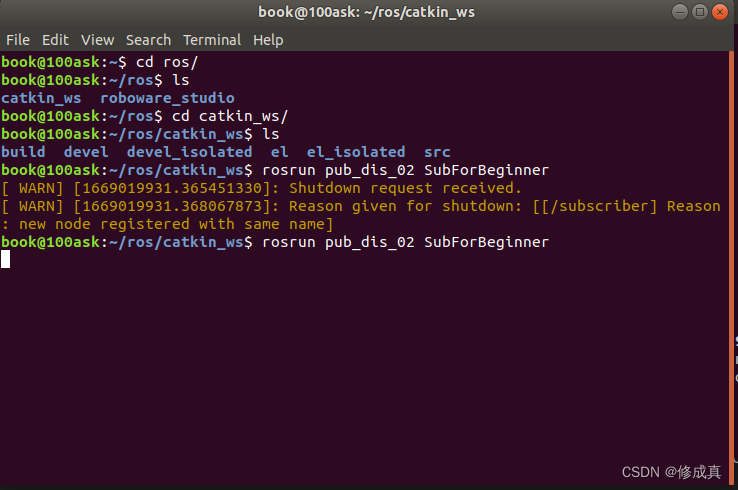
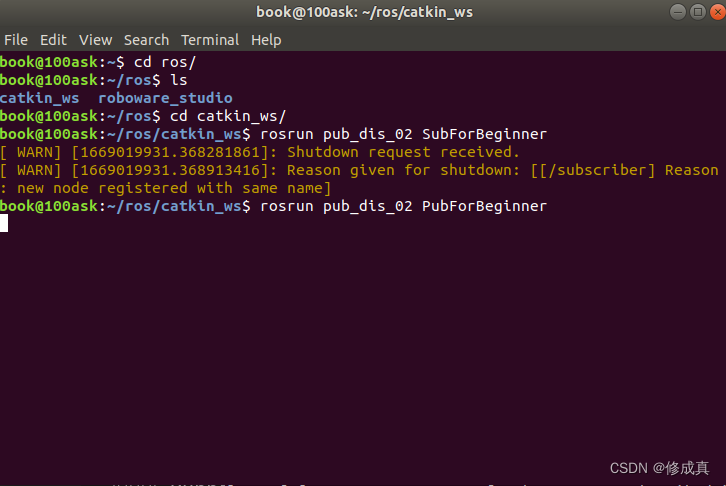
③ 再分别打开两个终端,在两个终端分别输入下面的命令:
格式:rosrun 包名 cpp文件名(节点名)
rosrun pub_dis_02 SubForBeginner
rosrun pub_dis_02 PubForBeginner
④ 在 接收端可以看到实验结果:

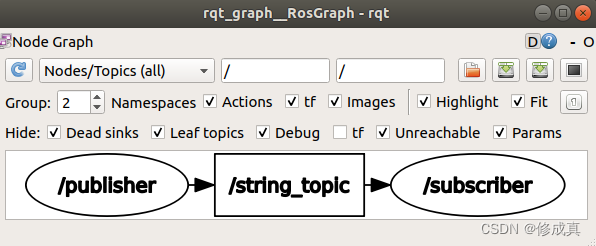
⑤ 新建一个终端输入命令 rosrun rqt_graph rqt_graph,可以查看节点间通信的通信关系。
五、自定义消息
根据上面的代码我们知道,发布与接收的消息需要遵循同一种类型,ROS系统已经帮我们定义了一些常用的数据类型。例如上面代码我们使用的。
当有些时候,当系统的消息类型无法满足我们的使用时,我们就需要自定义消息类型来使用。
这里重新建一个ROS包,来演示自定义消息类型。
5.1 自定义消息类型
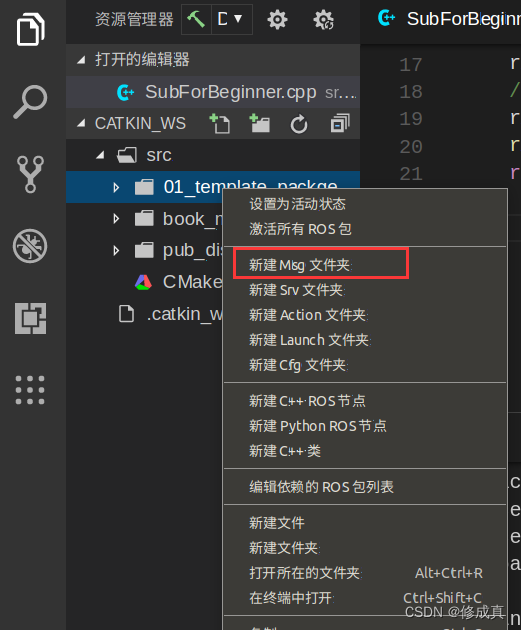
① 我们又新建了一个ROS包,使用和上面相同的ROS包依赖。在 RoboWare Studio 中,右击ROS包,就可以创建 msg 文件夹,在msg创建自定义消息文件,格式为.msg。或者可以直接敲命令进行创建。但自定义消息文件必须储存在msg文件夹内。
② 在msg 文件夹内创建 Student.msg。文件名可以自定义。内容包含如下:
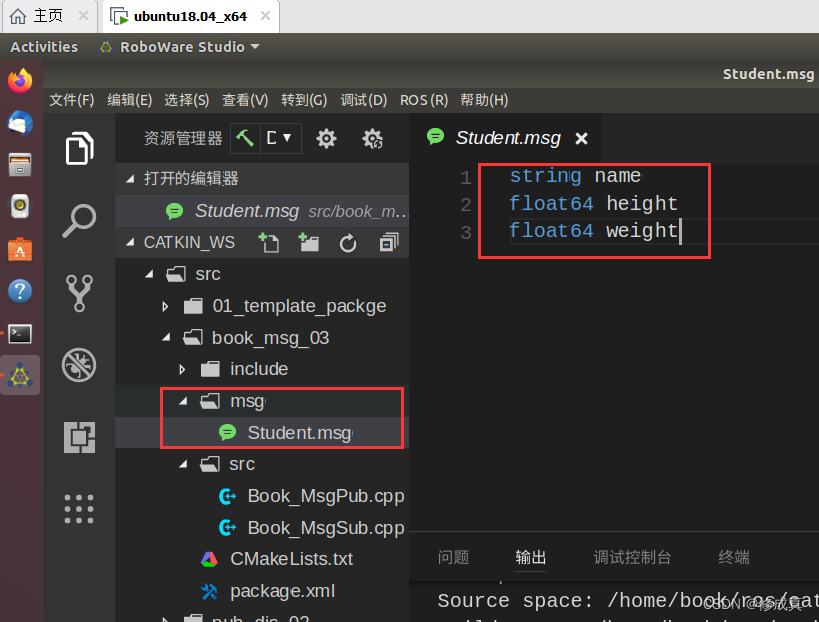
string name
float64 height
float64 weight
内容是:
- 字符串类型 ,保存学生姓名
- 64位的数据类型,保存学生的身高
- 64位的数据类型,保存学生的体重
③ 在创建了自定义类型后,需要在ROS包目录下修改以下内容(如果文件中已经修改了,就不管)
package.xml文件修改:
- 添加:<build_depend>message_generation</build_depend>
- 添加:<exec_depend>message_runtime</exec_depend>
CMakeLists.txt文件修改:
- 修改:find_package (catkin REQUIRED COMPONENTS roscpp std_msgs message_generation),就是添加
message_generation - 打开注释,且有以下内容:add_message_files( FILES Message1.msg ),
Message1为你自己自定义msg文件名 - 打开注释,且有以下内容:generate_messages( DEPENDENCIES std_msgs )
- 打开注释,且有以下内容:catkin_package( CATKIN_DEPENDS message_runtime … )
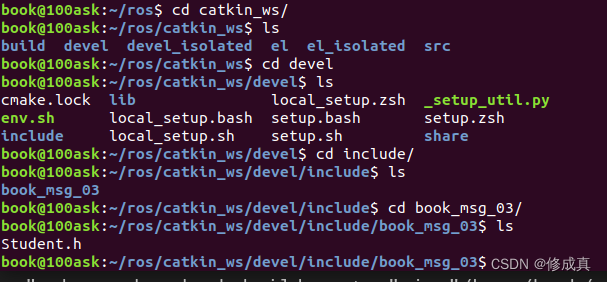
④ 点击编译,就可以在工作空间目录下,的devel目录下找到Student.h。我们使用自定义类型时,包含这个头文件就行了。
5.2 自定义消息发布端
#include "ros/ros.h"
#include "book_msg_03/Student.h"
#include <cstdlib>
using namespace std;
int main(int argc, char **argv)
{
//initial and name node
ros::init(argc, argv, "node_MsgPub");
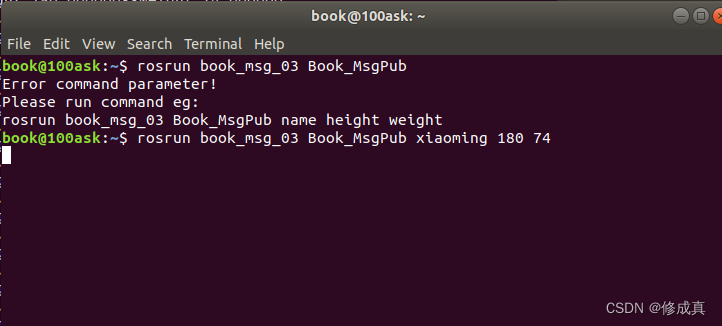
if(argc != 4)
{
cout << "Error command parameter!\n"\
<< "Please run command eg:\n"\
<< "rosrun book_msg_03 Book_MsgPub name height weight" << endl;
return -1;
}
//create node handle
ros::NodeHandle nh;
//create messge publisher
ros::Publisher MsgPub = nh.advertise<book_msg_03::Student>("MyMsg", 100);
book_msg_03::Student stdmsg;
stdmsg.name = argv[1];
stdmsg.height = atof(argv[2]);
stdmsg.weight = atof(argv[3]);
ros::Rate rate(10);
while(ros::ok())
{
MsgPub.publish(stdmsg);
rate.sleep();
}
return 0;
}
- if(argc != 4) :提醒用户如何使用该节点。
- ros::Publisher MsgPub = nh.advertise<book_msg_03::Student>(“MyMsg”, 100); 这里我们使用了自定义消息类型,格式为ROS包名::自定义消息类型。
- rate.sleep(); 固定发送消息的频率。
5.3 自定义消息接收端
#include "ros/ros.h"
#include "book_msg_03/Student.h"
// custom defined message callback function
void MsgCallback(const book_msg_03::Student &stdInfo)
{
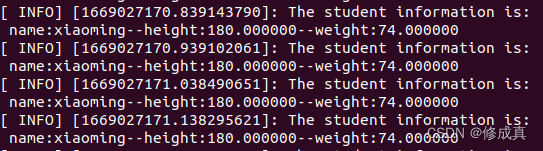
ROS_INFO("The student information is:\n name:%s--height:%f--weight:%f",
stdInfo.name.c_str(),
stdInfo.height,
stdInfo.weight);
}
int main(int argc, char *argv[])
{
//initial and name node
ros::init(argc, argv, "node_MsgSub");
//create node handle
ros::NodeHandle nh;
//create subscriber
ros::Subscriber MsgPub = nh.subscribe("MyMsg" ,100, &MsgCallback);
ros::spin();
return 0;
}
类似之前的接收端程序,不过这里使用的是自定义的学生消息数据类型。
5.4 测试
① 首先点击编译。
编译失败,可以在 ②位置处寻找问题,如果是语法问题,编译器里会使用 红线 勾出。
② 打开一个终端输入:
roscore
③ 再分别打开两个终端,在两个终端分别输入下面的命令:
格式:rosrun 包名 cpp文件名(节点名)
rosrun book_msg_03 Book_MsgSub
rosrun book_msg_03 Book_MsgPub xiaoming 180 74
④ 在 接收端可以看到实验结果:
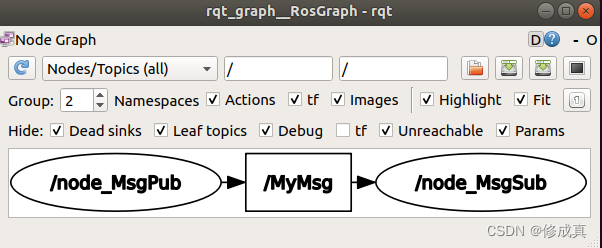
⑤ 新建一个终端输入命令 rosrun rqt_graph rqt_graph,可以查看节点间通信的通信关系。
到这里就结束啦!





![[附源码]java毕业设计小区宠物管理系统](https://img-blog.csdnimg.cn/914e633e5a0b41e0aff893b55743b184.png)
![[附源码]java毕业设计小锅米线点餐管理系统](https://img-blog.csdnimg.cn/18dc0740a4ee456988a07ce102e2aeea.png)