文章目录
- 内容概要
- 1 三维数据的获取方式及原理
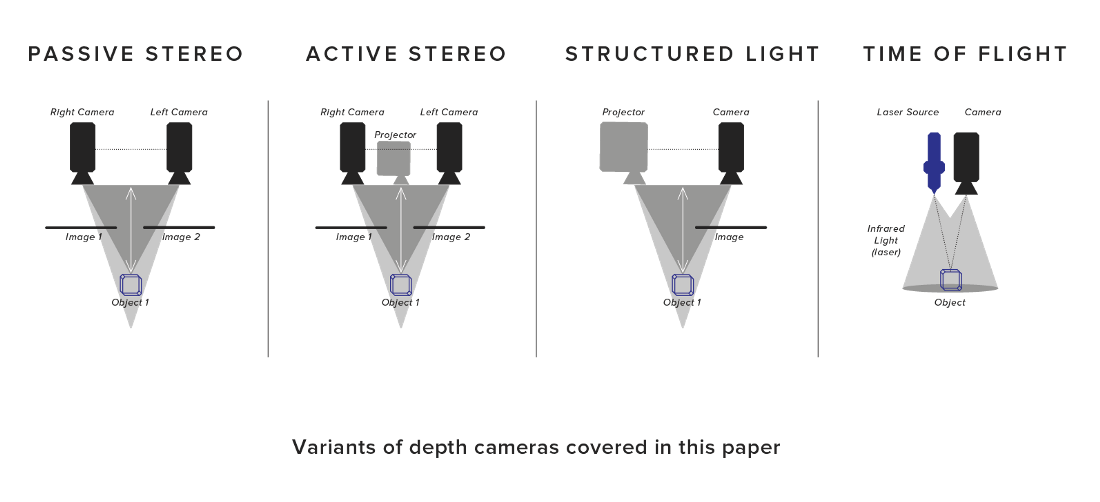
- 1.1 被动测量
- 单目立体视觉
- 双目立体视觉
- 多目立体视觉
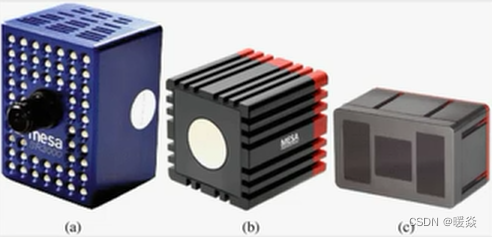
- 1.2 主动测量
- 结构光3D成像
- TOF 3D成像
- 脉冲法
- 相位法
- 2 三维数据的获取原理
- 立体视觉测量法
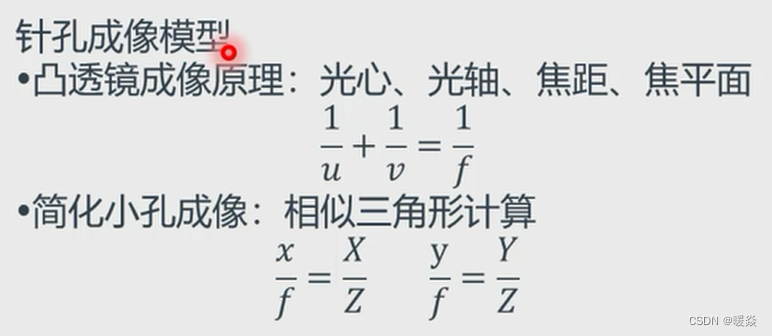
- 相机成像模型
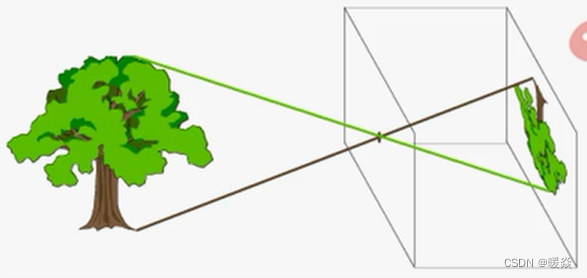
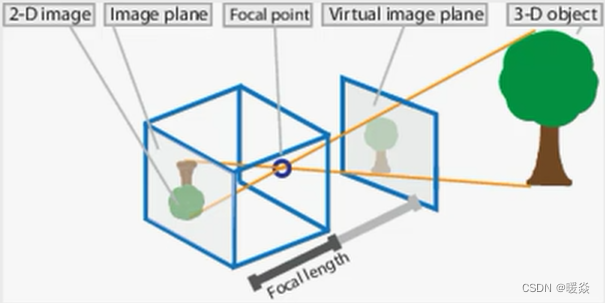
- 小孔成像模型(相机成像模型的理想情况)
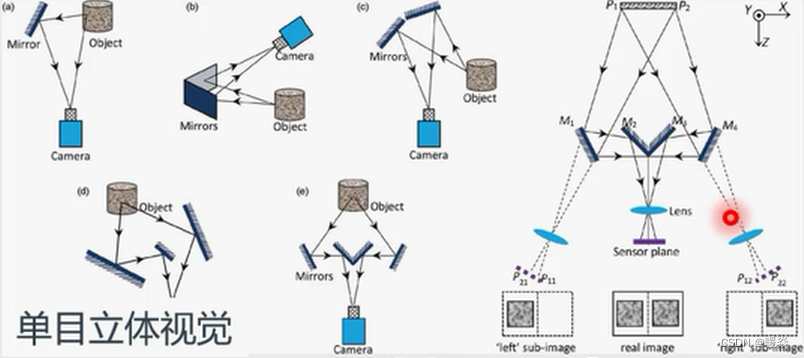
- 单目立体视觉
- 聚焦法
- 离焦法
- 单目棱镜法(变向实现多目)
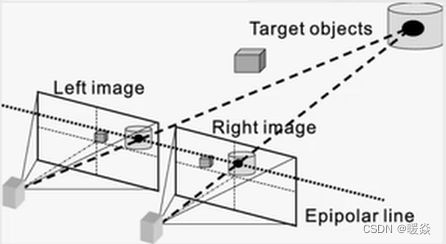
- 双目立体视觉
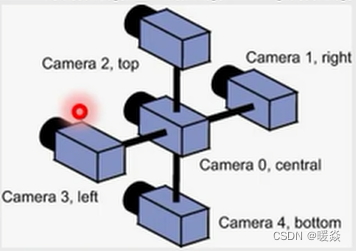
- 多目立体视觉
- 3 三维信息的表征形式
- 点云 PointCloud
- 参数化曲线曲面 Parametric Surface
- 参数化曲线
- 常用参数化曲线
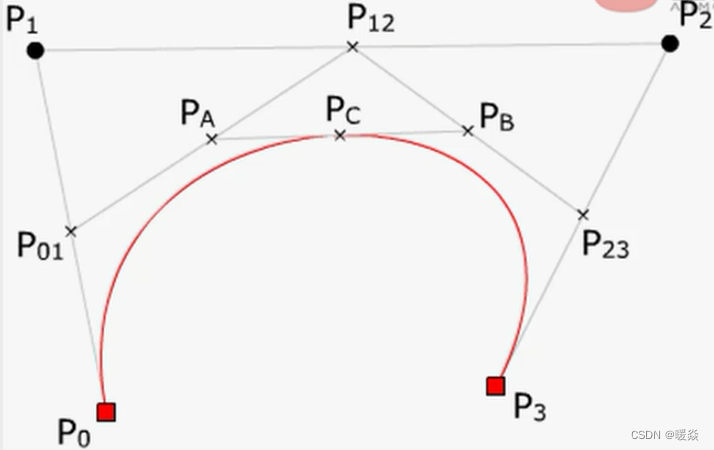
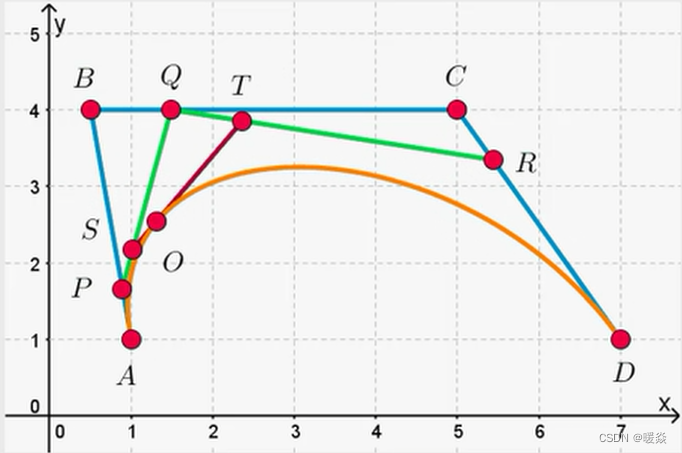
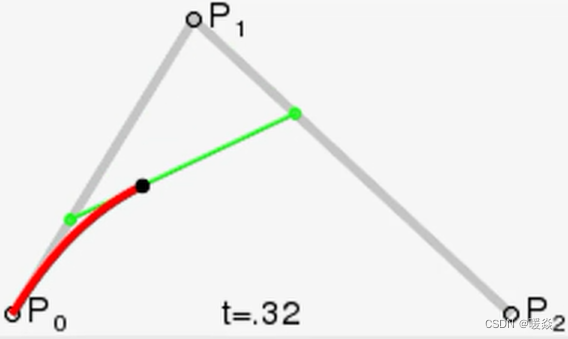
- 贝塞尔曲线(应用:样条线)
- 参数化曲面
- 参数化曲面表示
- 优点
- 缺点
- 常见的参数化曲面
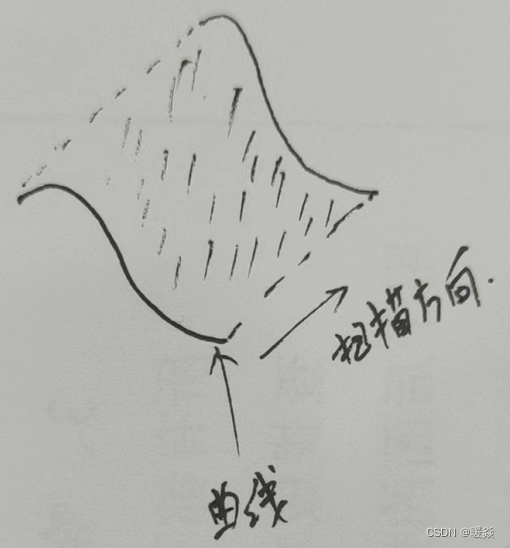
- 曲线扫描得到曲面
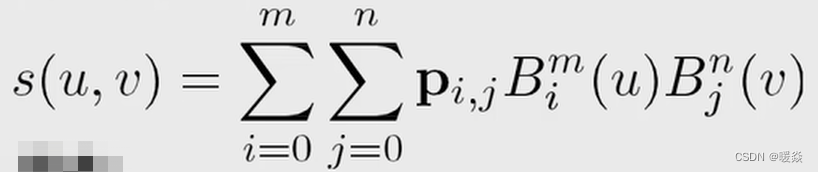
- 贝塞尔曲面
- 隐式曲线曲面 Implicit Surface
- 隐式曲面表示
- 优点
- 缺点
- 常见隐式曲面
- 细分曲面 Subdivision Surface
- 多边形面元 Mesh
- 常见多边形面元
- 多边形面元(多边形剖分)
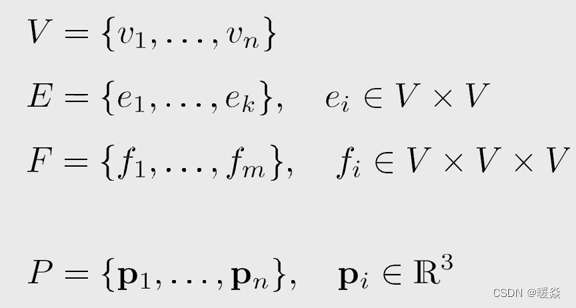
- 数学表征
- 性质
- 三角面元(三角剖分)
- 数学表征
- 优点
- 如何将点云转换为面元?
- delaunay 三角剖分准则
- bowyer-watson 算法
- 体素
- 优点
- 缺点
- 4 深度学习中的三维表征
- 4.1 点云研究中的三维表征
- 4.2 自动驾驶研究中的三维表征
- 5 点云的基本特征和描述
- 点云基本特征
- 点云基本特征描述
- 法向量
内容概要
1 三维数据的获取方式
2 三维数据的获取原理
3 三维信息的表征形式
4 深度学习中的三维表征
5 点云的基本特征和描述
6 三维空间变换
1 三维数据的获取方式及原理
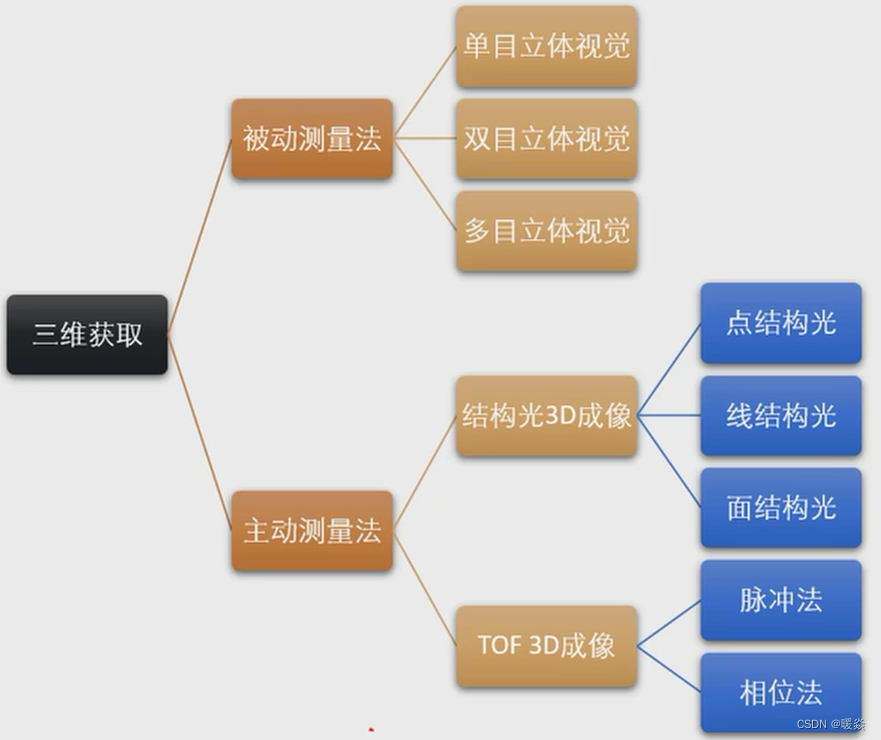
1.1 被动测量
单目立体视觉
双目立体视觉

多目立体视觉


1.2 主动测量
结构光3D成像

TOF 3D成像
脉冲法


相位法
2 三维数据的获取原理
立体视觉测量法
相机成像模型
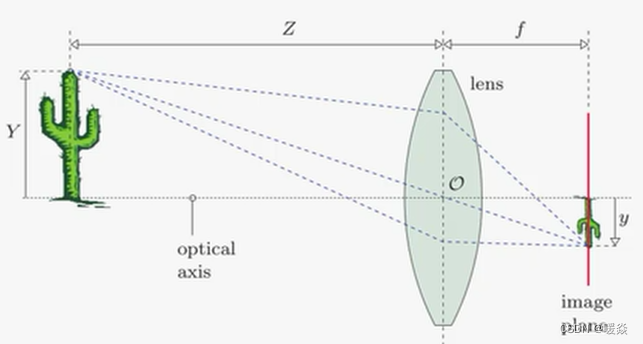
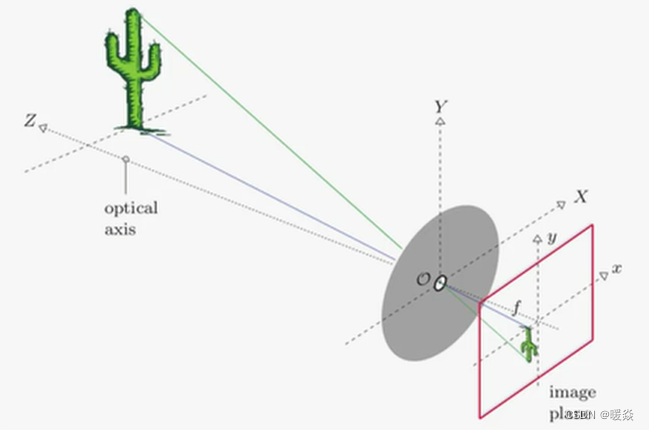

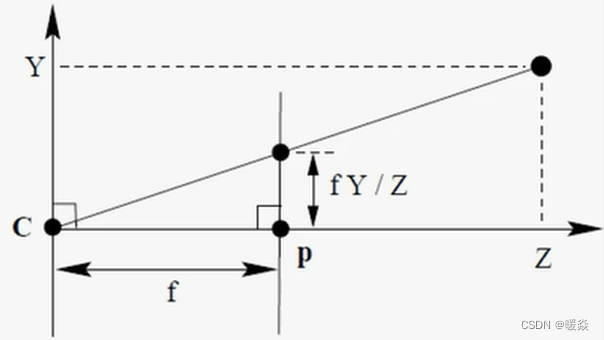

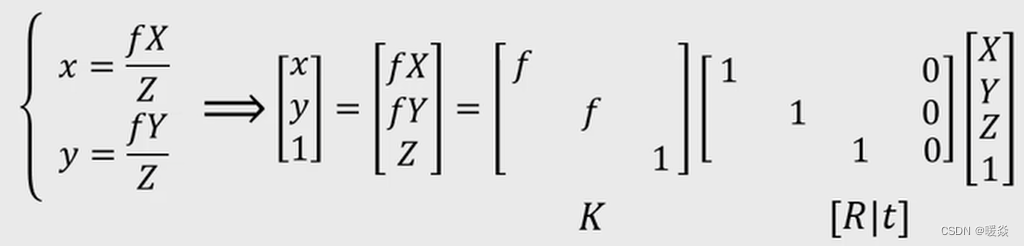
小孔成像模型(相机成像模型的理想情况)
小孔成像中没有畸变,但是在相机成像中,可能出现光心偏移或者透镜材质不均匀导致的畸变。
单目立体视觉
聚焦法
相机主动调焦,并使相机相对于被测点处于聚焦位置,然后根据透镜成像公式求得被测点相对于相机的距离。相机偏离聚焦位置会带来测量误差,因此寻求精确的聚焦位置是关键所在。
离焦法
不要求相机相对于被测点处于聚焦位置,而是根据标定出的离焦模型计算被测点相对于相机的距离,这样就避免了由于寻求精确的聚焦位置而降低测量效率的问题,但离焦模型的准确标定是该方法的主要难点。
单目棱镜法(变向实现多目)
主要应用于微观结果或光学研究。
双目立体视觉
多目立体视觉
机器人系统里应用的多。
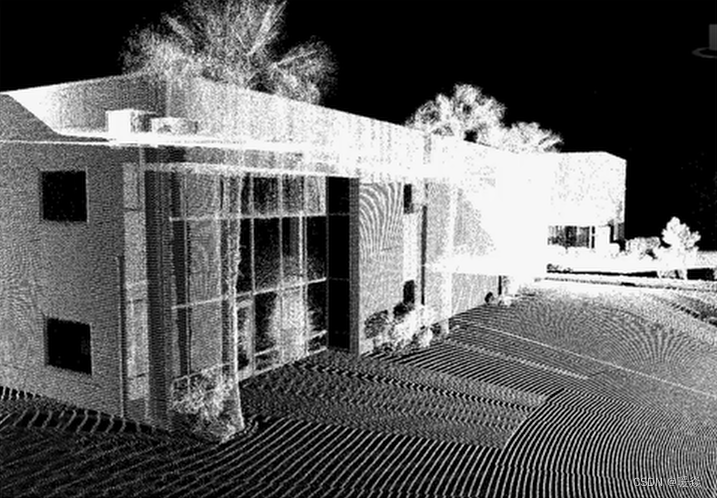
3 三维信息的表征形式
图片来源 http://graphics.stanford.edu/courses/cs468-17-spring/
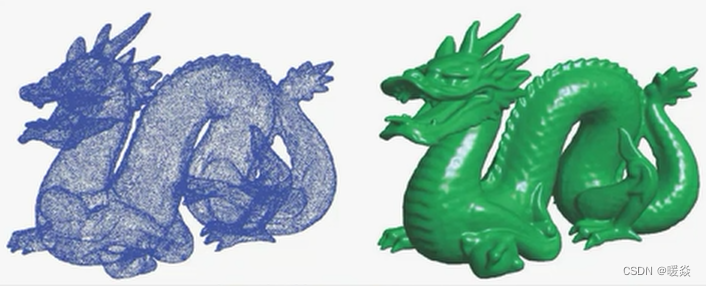
点云 PointCloud
参数化曲线曲面 Parametric Surface
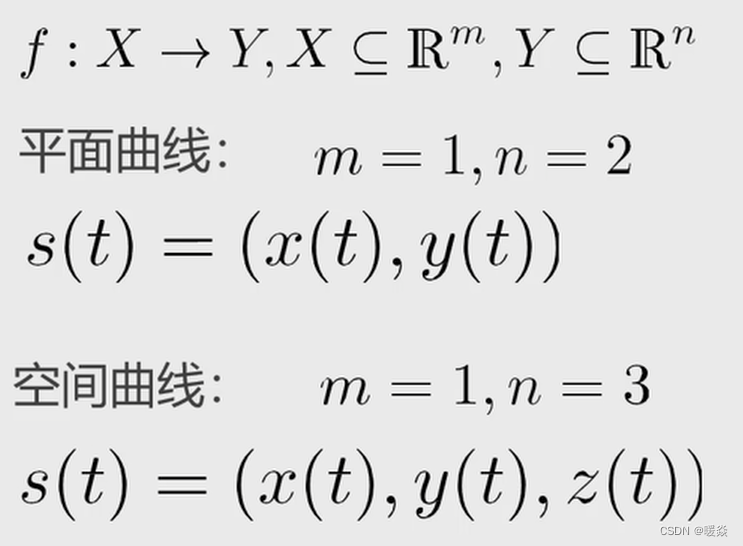
参数化曲线
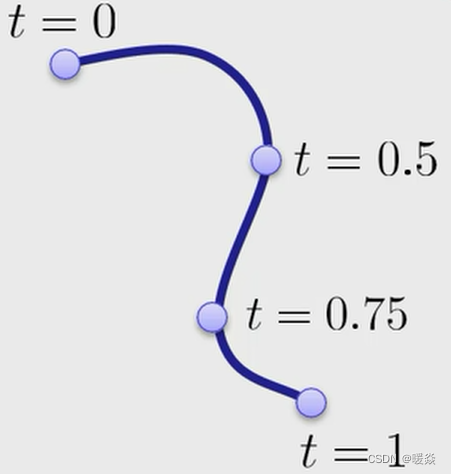
常用参数化曲线
贝塞尔曲线(应用:样条线)

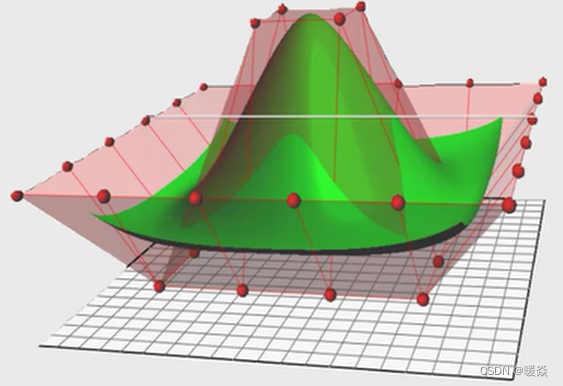
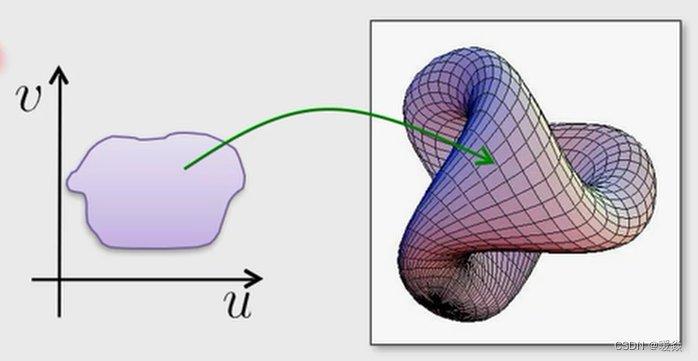
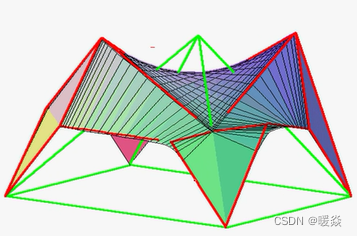
参数化曲面
参数化曲面表示

优点
容易生成曲线或者曲面上的点
参数分离,容易分析
缺点
难以确定内部外部空间
难以判断点是否在曲面曲线上
难以生成非常复杂的曲线曲面(解决:局部表面(多边形面元))
常见的参数化曲面
曲线扫描得到曲面
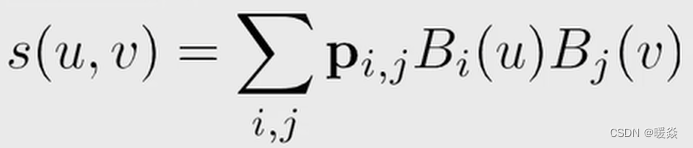
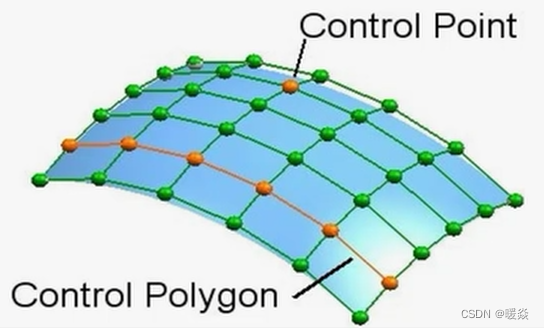
贝塞尔曲面
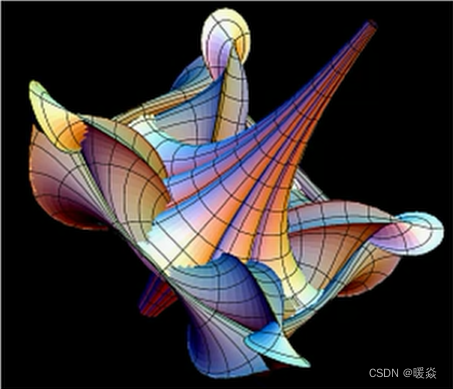
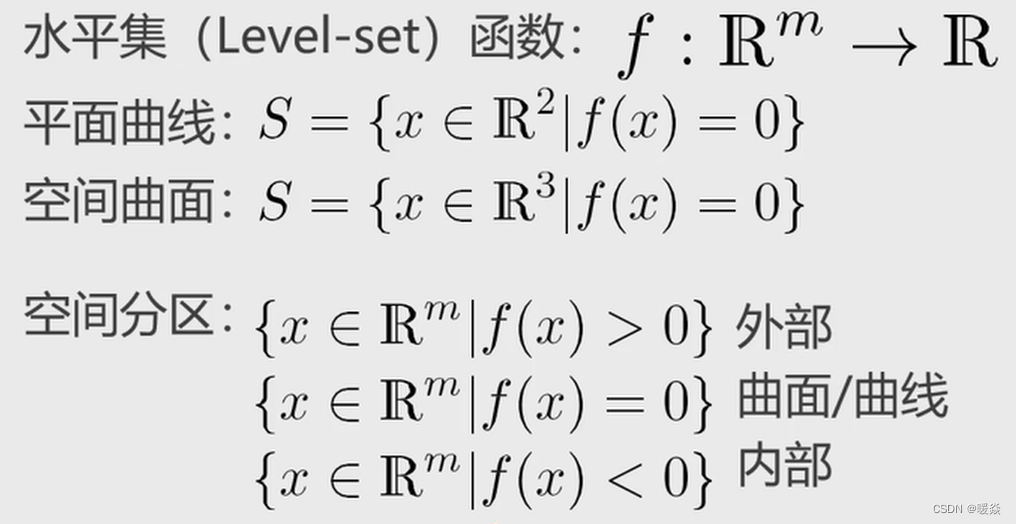
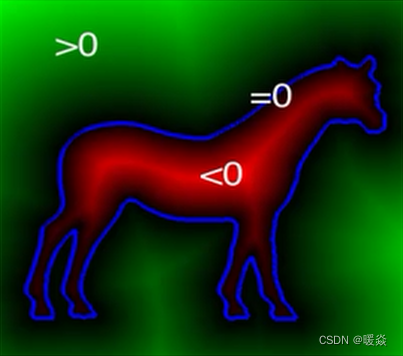
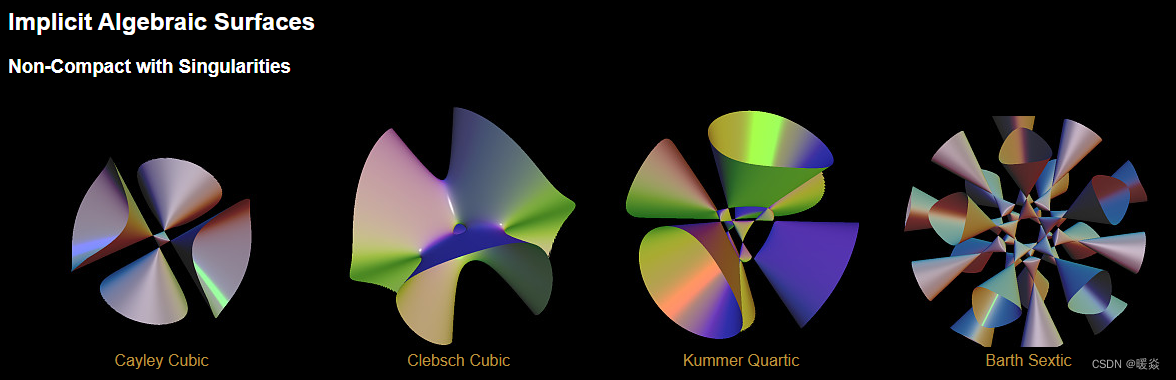
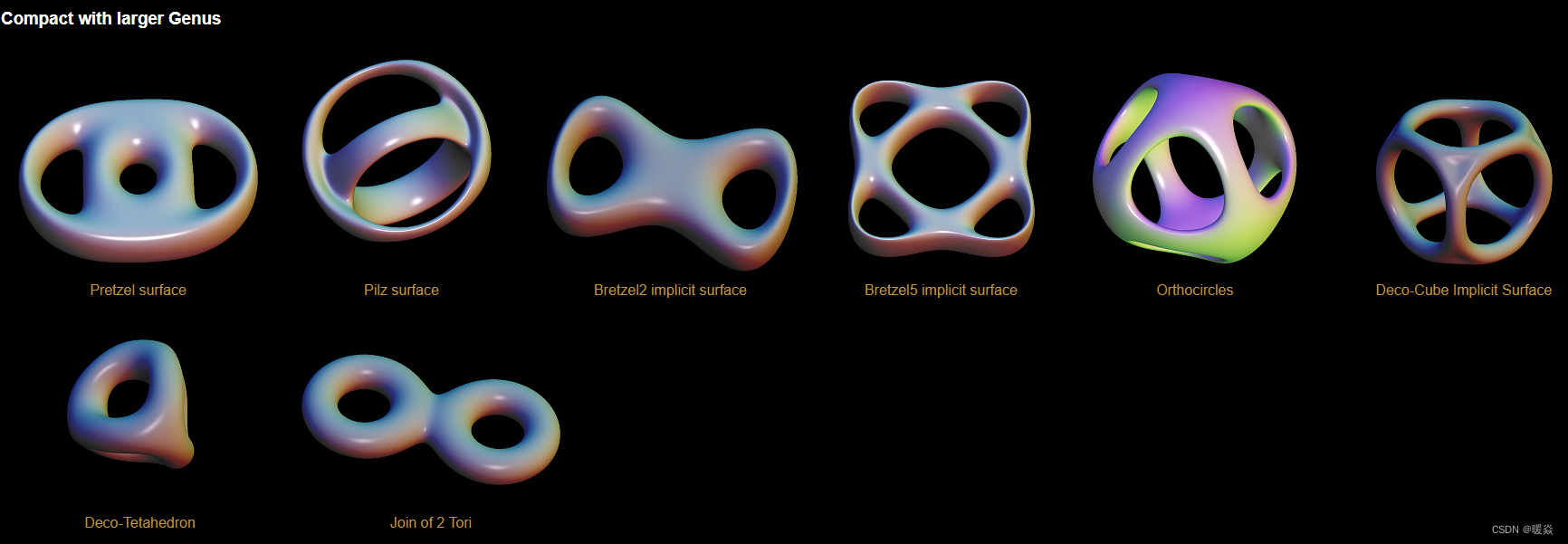
隐式曲线曲面 Implicit Surface
隐式曲面表示
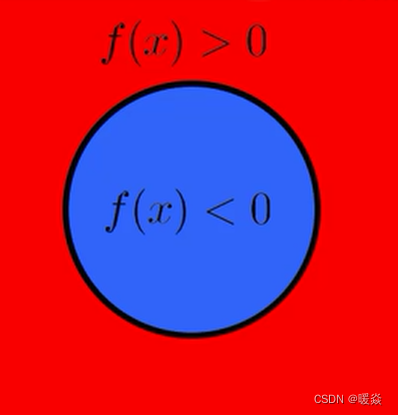
优点
容易确定内部外部空间
容易确定点是否在曲线曲面上
缺点
难以生成曲线曲面上的点
不适合实时渲染
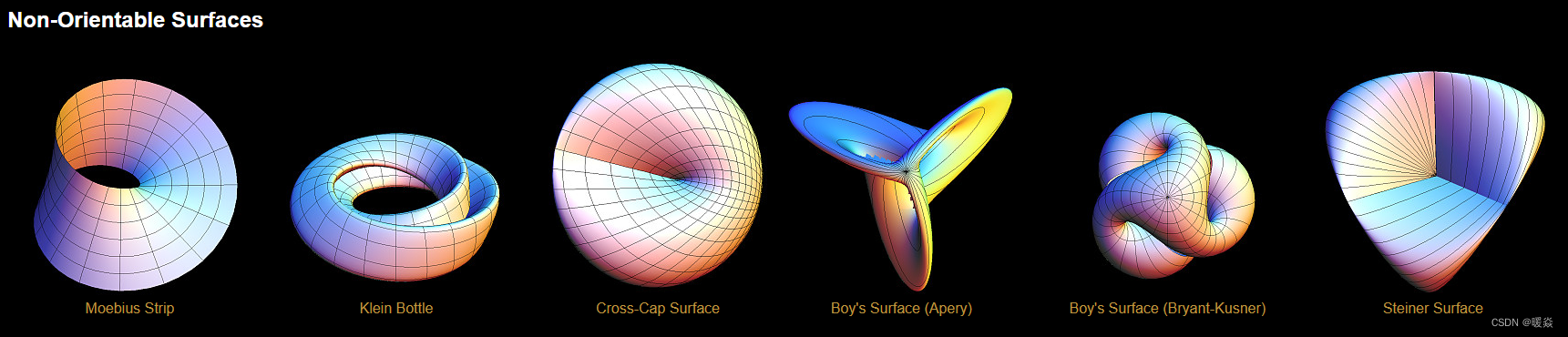
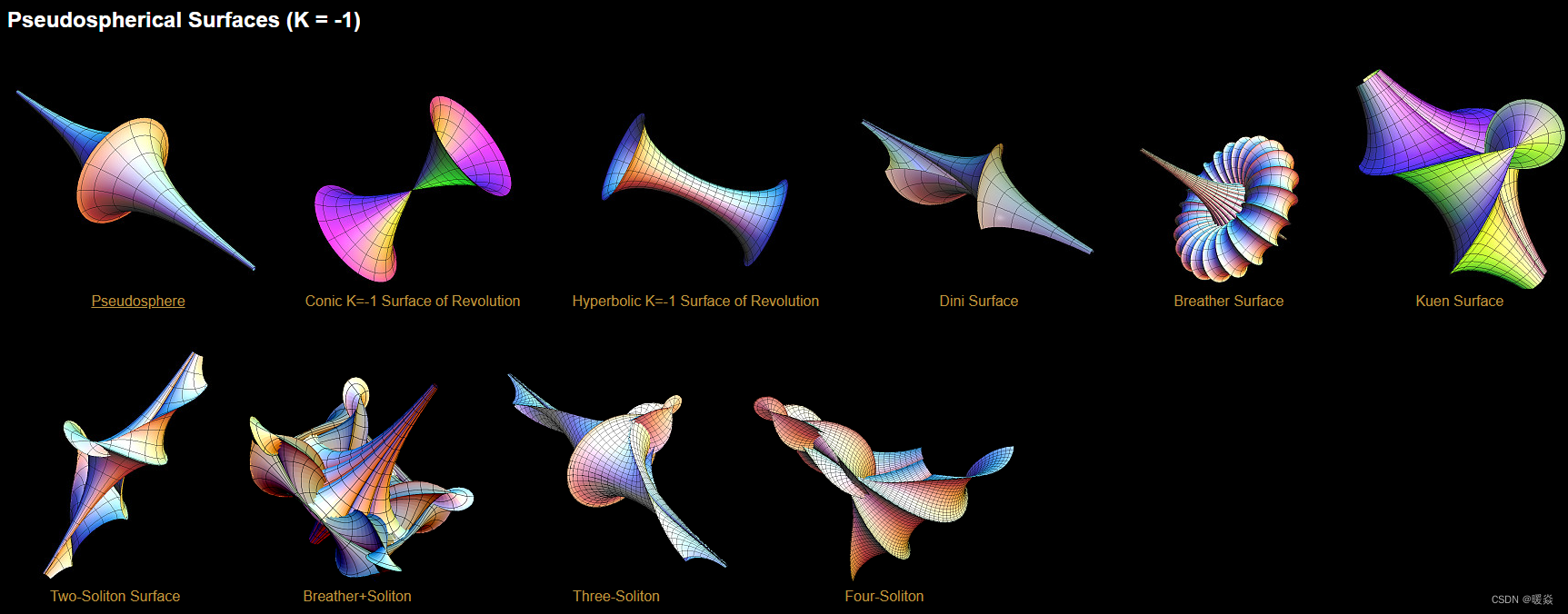
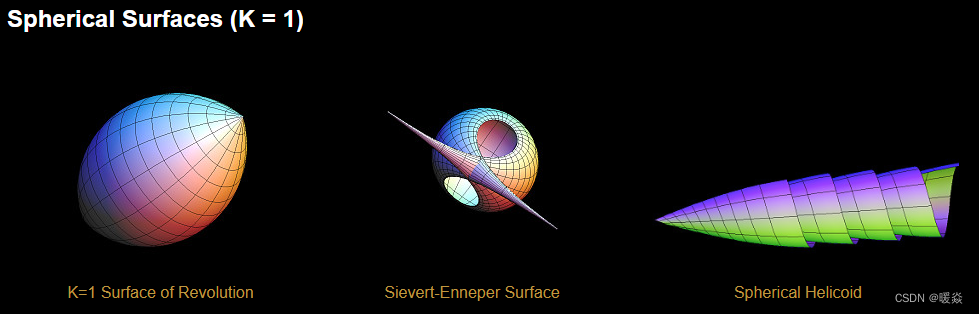
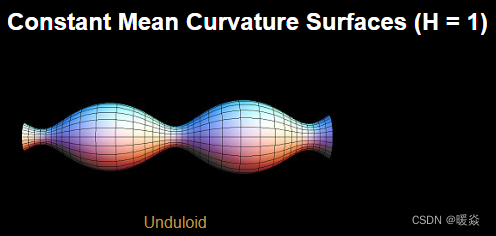
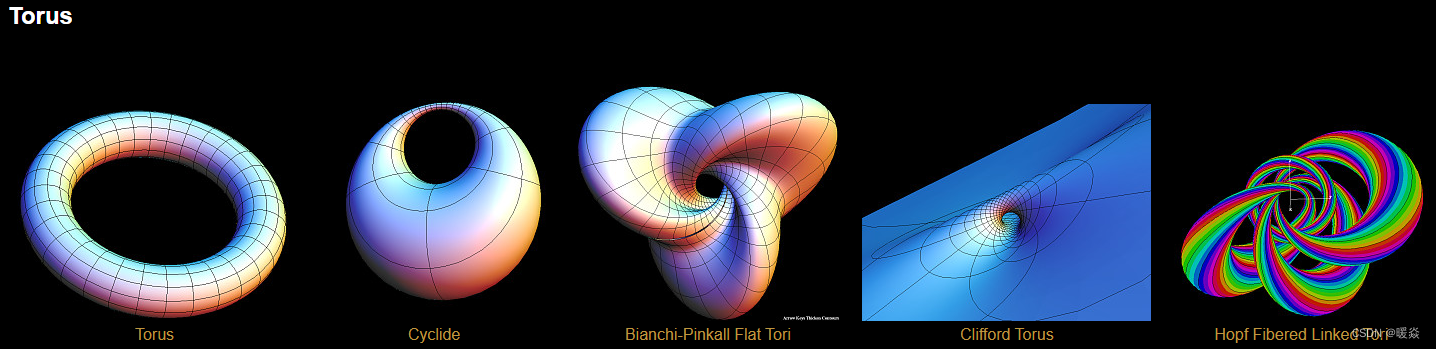
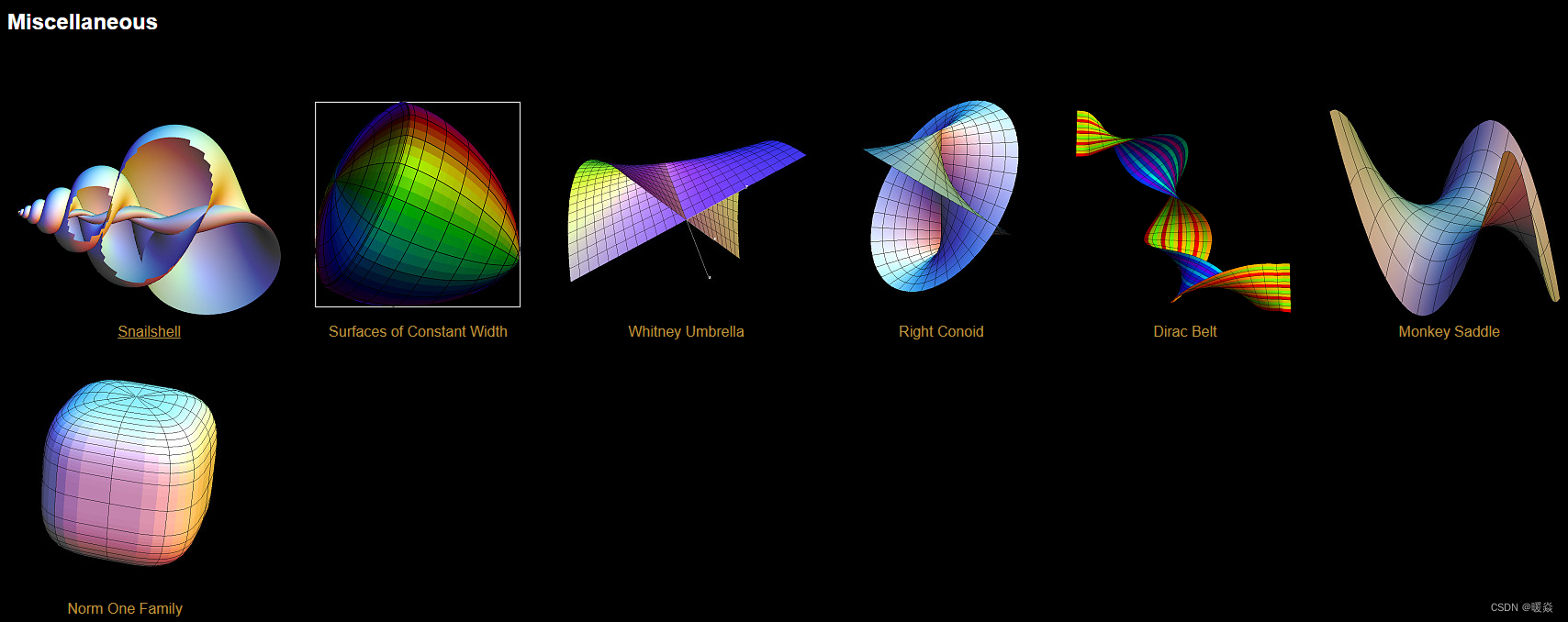
常见隐式曲面
图片来源:https://virtualmathmuseum.org/Surface/gallery_o.html

细分曲面 Subdivision Surface
多边形面元 Mesh
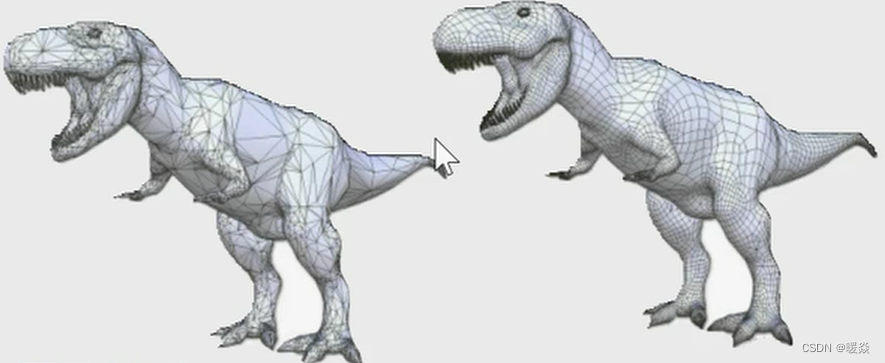
分的越精细拟合的越好。
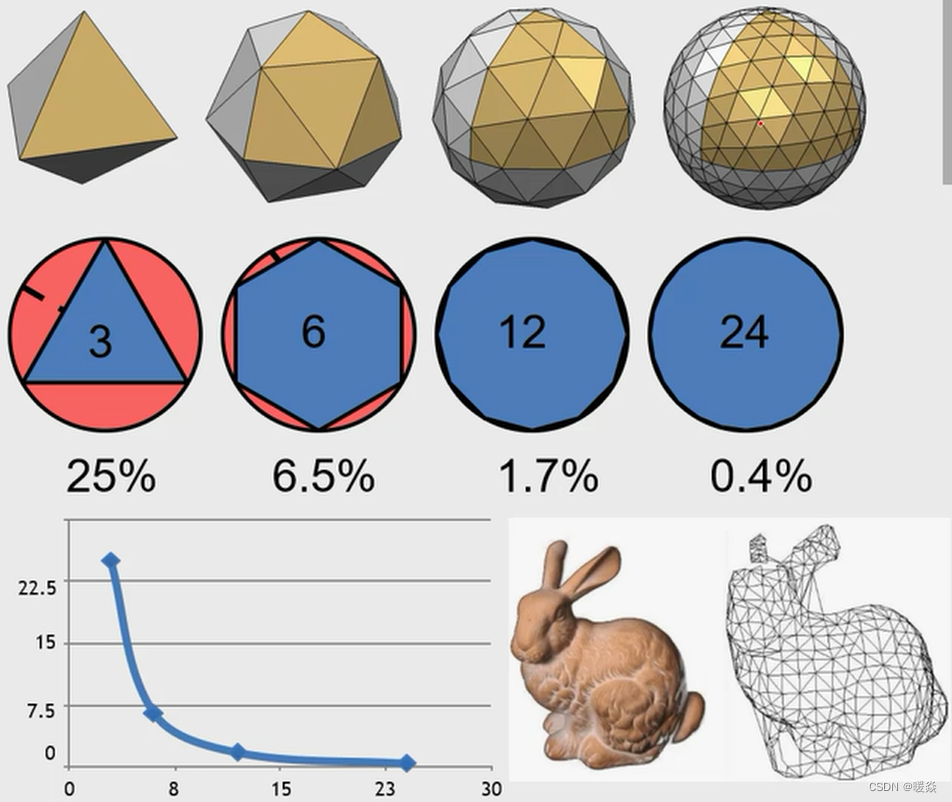
量化误差可控(分的越精细拟合的越好)
应用于任意拓扑结构
支持动态调整
可以利用GPU高效运算
常见多边形面元
多边形面元(多边形剖分)
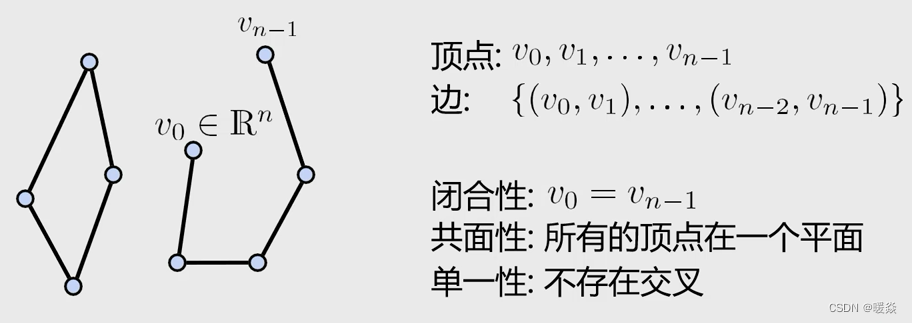
数学表征
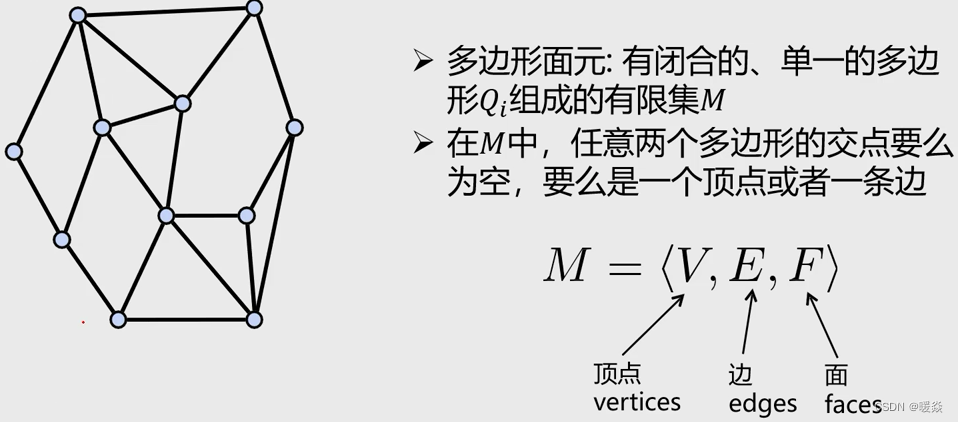
性质
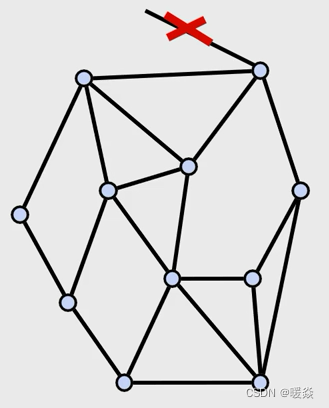
每条边至少属于一个多边形。
每个Q_i定义了多边形网格的一个面。
顶点的度=入射边的数目
多边形面元的边界
三角面元(三角剖分)
多边形面元,其中每个面是三角形。
数学表征
优点
简化数据结构
简化渲染
简化算法
每个面都是平面和凸的
任何多边形都可以三角化
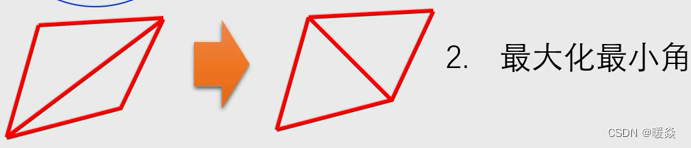
如何将点云转换为面元?
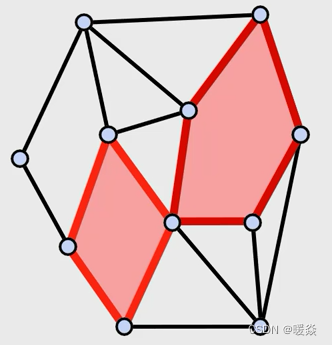
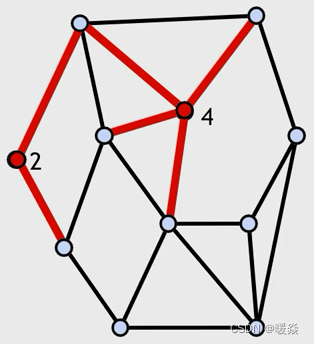
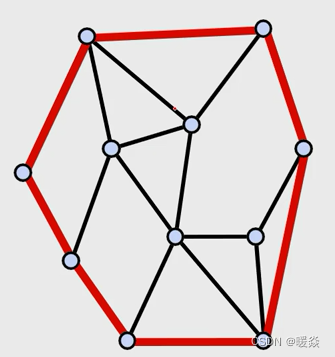
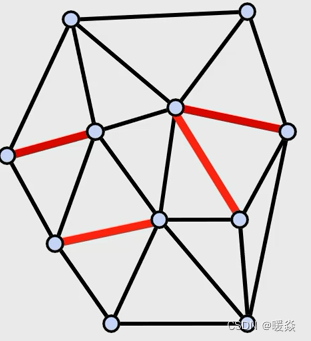
delaunay 三角剖分准则
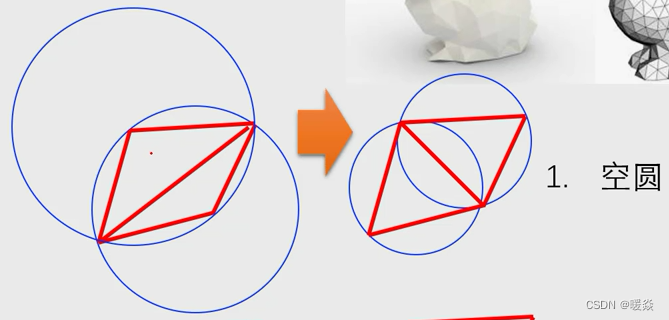
bowyer-watson 算法
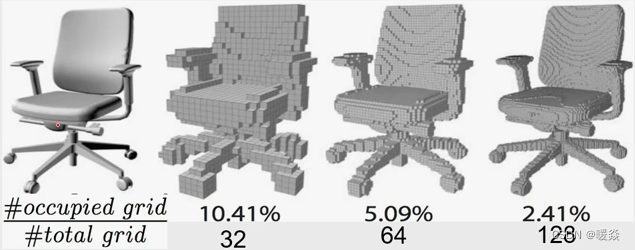
体素
无序点云有序化(类比像素)
空间体素化,占用格点0, 1(格子越小精度越高)
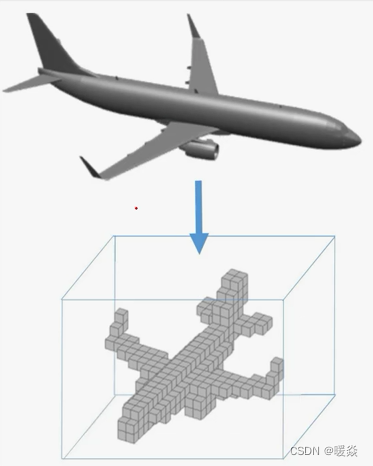
优点
快速检测空间点是否被占据
体像素之间的逻辑运算
运算速度快
缺点
存储效率很低,特别在深度学习模型中问题突出。
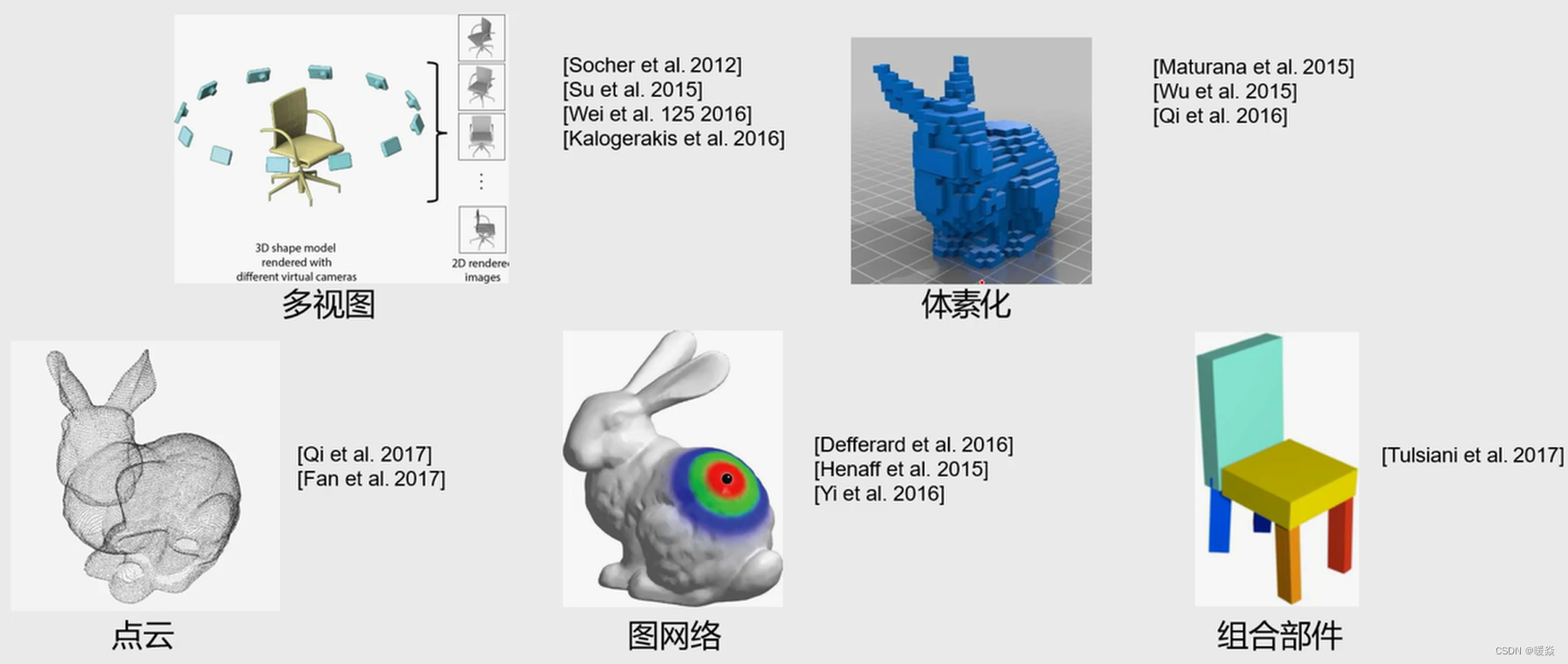
4 深度学习中的三维表征
4.1 点云研究中的三维表征
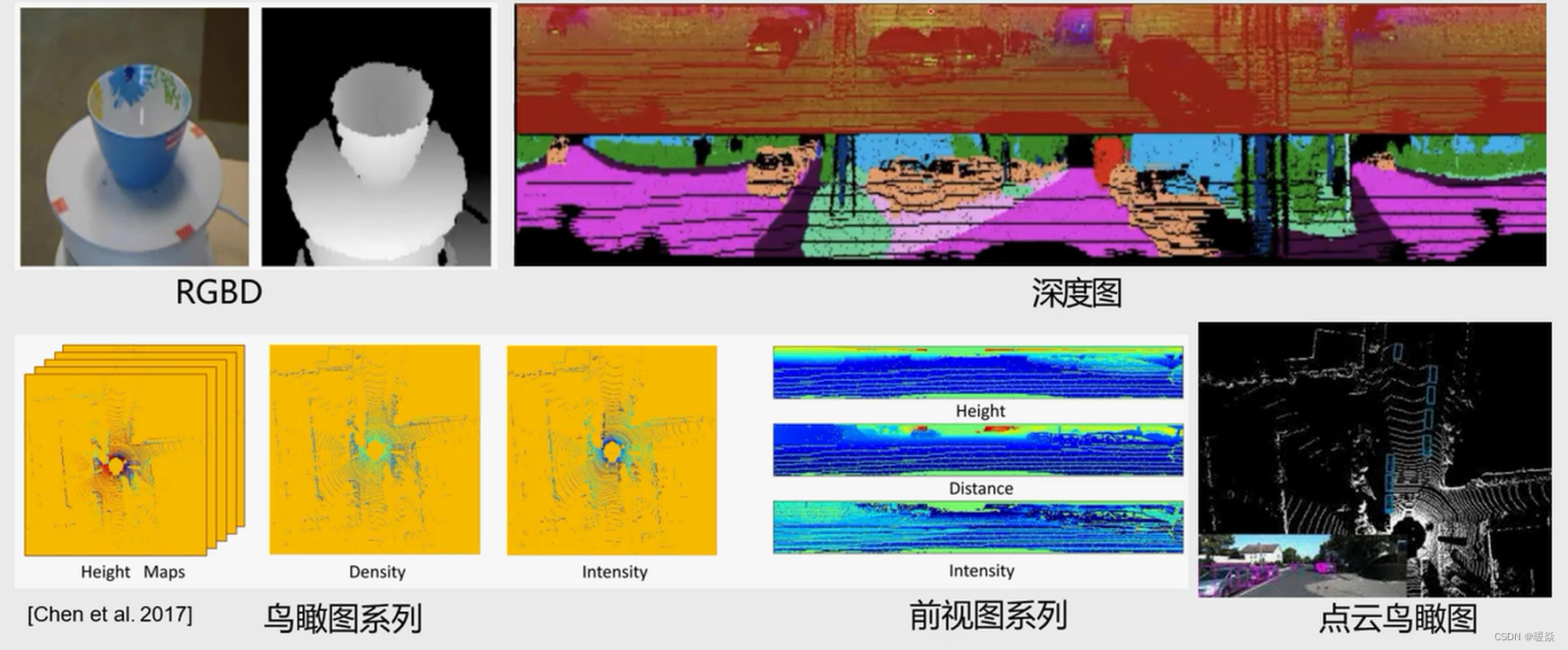
4.2 自动驾驶研究中的三维表征
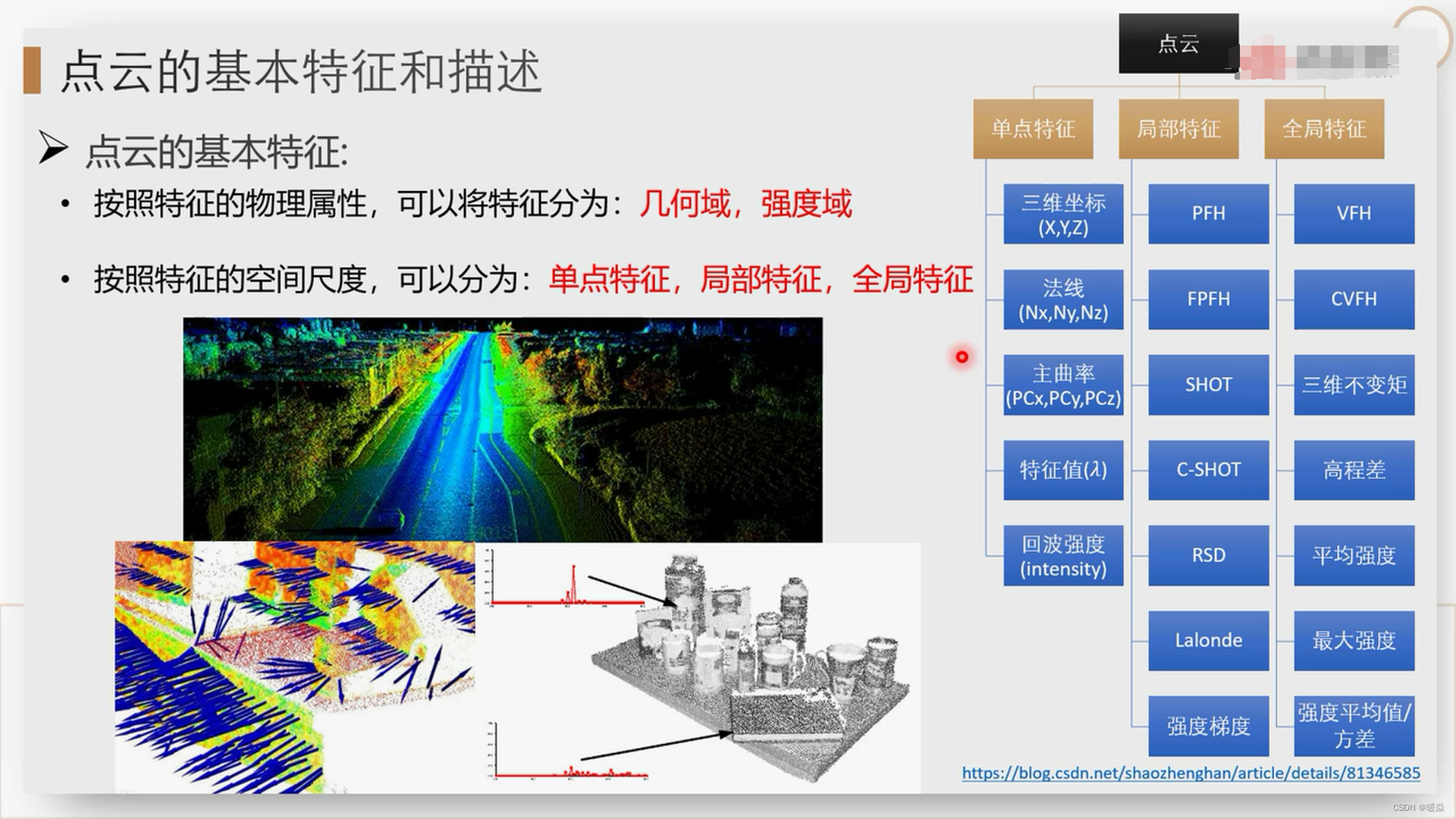
5 点云的基本特征和描述
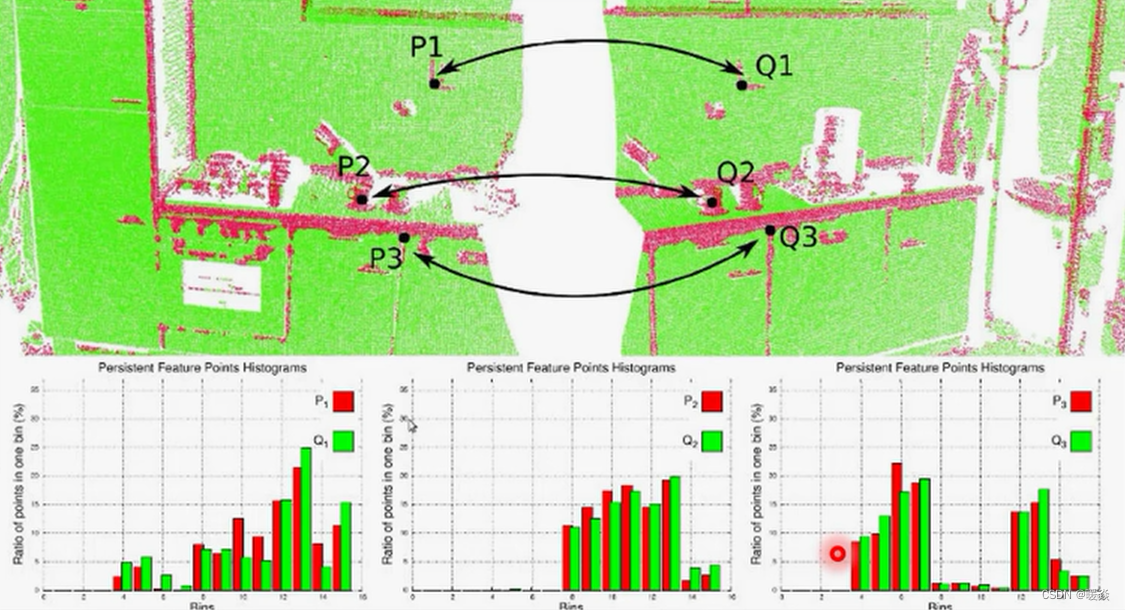
RGBD 两个不同视角下相比较,有相同有不同。
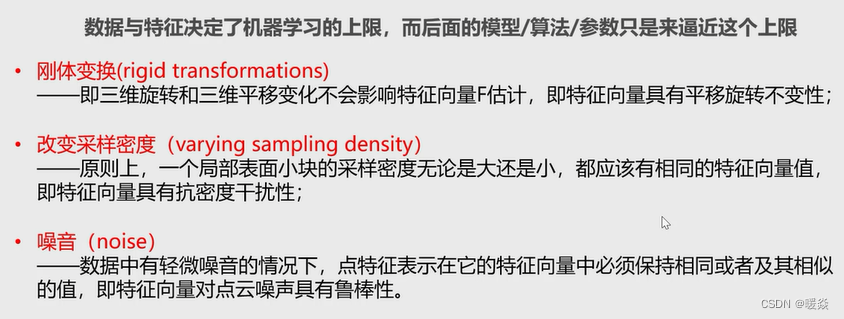
点云基本特征
按照特征的物理属性,可以将特征分为:几何域,强度域
按照特征的空间尺度,可以分为:单点特征,局部特征,全局特征
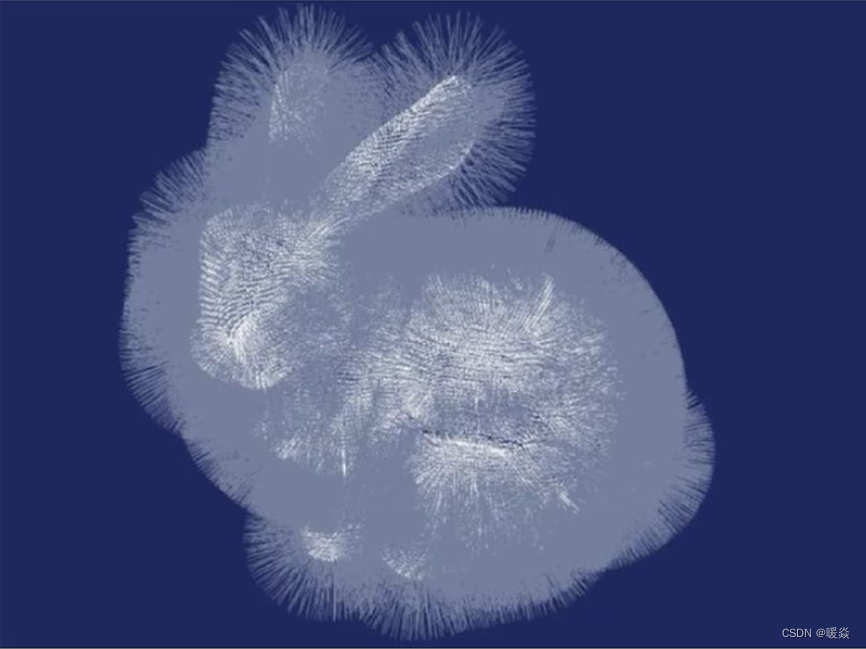
点云基本特征描述
法向量
![[附源码]计算机毕业设计JAVA基于web的球类体育馆预定系统](https://img-blog.csdnimg.cn/7799420366594499855e6579801a7aea.png)