一、前言
RANSAC(Random Sample Consensus)算法并不陌生,在上一篇博客中(基于SIFT的图像Matlab拼接教程)也提到过,之前代码中也多次用过,其在直(曲)线拟合、特征匹配、过滤外点(Outlier)等领域有着重要的应用。RANSAC出现的原因以及重要意义在于:虽然最小二乘可以十分有效地进行拟合,但其对离群点非常敏感,在离群点出现的情况下很有可能出现“一颗老鼠屎坏一锅汤”的情况。RANSAC就是为了解决这个问题而产生的。
二、介绍
正如其名字所说,RANSAC的核心思想是随机采样一致性,类似于投票:当有最多数据点符合某个模型时,即认为该模型是正确的,并且根据其算出的、误差在阈值内的数据点为内点。简单描述算法过程是:首先从数据点中随机选择指定数量的点构建模型,然后将全部数据点带入构建的模型中,若计算得到的结果与真实数据差异小于误差阈值,则认为其是内点,否则认为是外点。统计全部数据点中内点的个数并记录估计的模型参数。重复上述步骤一定次数,得到多个结果,选取内点数量最多时候对应的模型参数,即认为是正确的模型。根据这个模型计算出的误差在阈值内的所有点即为最终选择的内点。这样便完成了离群点的剔除。
RANSAC在实际使用中有几个常用的公式,整理如下:
选择某个点,其为内点的概率:

建立一个正确模型的概率,这里n表示建立一个模型所需要的样本点个数:
经过k次迭代后没有建立一个正确模型的概率:
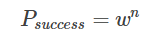
经过k次迭代后,建立一个正确模型的概率(成功率):

期望RANSAC的成功率为p,最少迭代次数k:
若建立模型需要m个点,数据集有n个数据,遍历一遍数据集需要的次数:

可以看到,在实际中第四和第五个式子最为常用。一个用来估计当前状态下成功的概率,另一个是估计最少迭代次数。这里需要注意的是公式5只是给出了最少应该迭代的次数,并不是说只能迭代这么多次。其实对于RANSAC算法,只要迭代次数足够多,最终肯定能得到最优的结果。只是从实际角度希望可以在最少迭代次数下最大概率获得最优结果,这便是公式5存在的意义。从理论上说迭代次数没有上限,而且由于RANSAC的机制:取所有迭代次数中效果最好的,所以迭代次数越多越有可能得到最好的结果。若遍历了一遍所有数据,则肯定能获得最好结果。但从实际应用的角度希望找到最合适的次数,公式5和公式6一个给出了迭代次数下限,一个给出了迭代次数上限。若小于下限,则有非常大可能得不到最优结果;如果超过上限太多,则会增加冗余计算量,意义不大。
通过以上的介绍,需要注意以下几点:
RANSAC并不是一个“死板的”算法,而是一种思想。正是这种思想使其非常灵活,具体实现形式也可能千差万别。这里活就活在模型与误差评价指标。
RANSAC的内点选取是与模型估计紧密耦合的。
误差阈值ε是项“技术活”。它一方面决定了估计模型的精度,另一方面决定了最终选取的内点个数。
并非所有数据都适合用RANSAC去除外点,它适用与遵循某种分布规律、可用模型拟合的数据
RANSAC每次迭代的结果并不一定是更好的、进化的。因为是随机采样,所以每次迭代的结果也是随机的。不断增加的是我们获得最优模型和内点的概率。
三、RANSAC实例应用
3.1RANSAC拟合直线
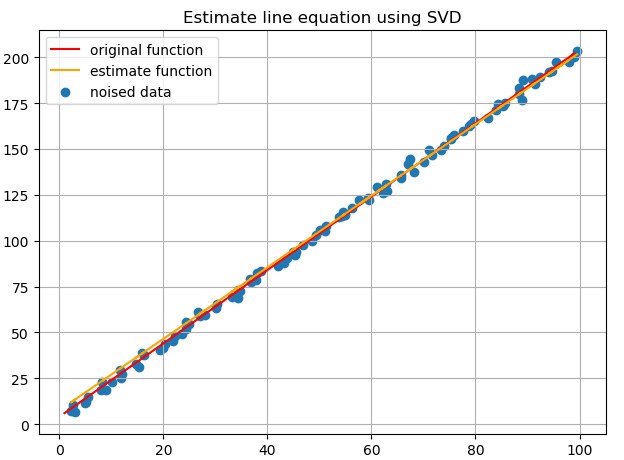
首先可以使用最小二乘进行直线拟合,具体是利用SVD对系数矩阵A进行分解,取V的最右边一列为结果。拟合结果如下:
正如上文所说,最小二乘对于离群点非常敏感,下面动图演示了这一过程:
因此,为了能在有离群点的情况下拟合出直线,使用RANSAC算法,如下动图演示了RANSAC不断迭代的过程:

这里重要的就是误差定义,定义误差为某点到直线的垂直距离而不是Δx、Δy。
3.2RANSAC求解单应矩阵
下图为SVD进行单应矩阵估计:
可以很明显地发现,如果不去除离群点会对最终估计结果有非常大的影响。所以用RANSAC算法进行剔除,动图如下:
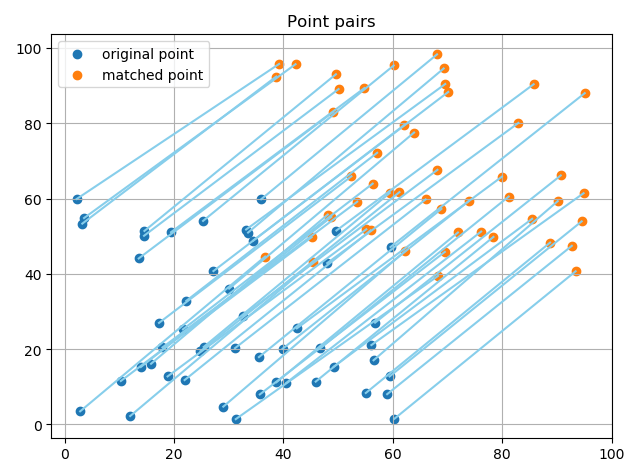
最后在实际的图片上提取特征点并进行匹配,利用RANSAC剔除离群点:

可以看到,总体效果还是不错的,成功识别出了一些错误的匹配点对。这里的误差度量用的是重投影误差,简单来说就是根据随机选择的4个点求解单应矩阵,然后利用单应矩阵对数据点进行变换,将结算出来的点与实际点计算欧氏距离,若其小于阈值则认为是内点。
四、小结
在两个不同的应用场景中可以看到由于模型以及评价指标的不同,导致在代码实现上存在差异。所以RANSAC在具体实现中并没有什么固定格式,需要根据当前数据以及模型不断修改调整。但相比于这些千变万化的实现,RANSAC的思想才是不会改变的本源,是需要我们记住的。