分享一个国外的趣味项目,可以计数,也可以完善进行动作是打分,确定标准程度
原文链接:https://aryanvij02.medium.com/push-ups-with-python-mediapipe-open-a544bd9b4351

程序原理介绍
在新加坡军队中,有一种测试叫做IPPT(个人身体素质测试)。这个测试的困难不在于它对体力的要求有多高,而在于用来计算做俯卧撑和仰卧起坐次数的电子机器。
和大多数人一样,我的俯卧撑动作总是不达标(根据机器的意见)。此外,由于缺乏参照机器标准的练习,许多NSMen(已经完成两年强制性服役的人)在IPPT测试中都难以取得好成绩。
因此,我决定使用mediapipe和OpenCV创建一个程序,跟踪我们的俯卧撑动作,确保我们每一个俯卧撑动作都达标。
程序结构介绍
该项目有两个文件即可运行:
文件一:PoseModule.py
文件二:main.pyPoseModule.py
PoseModule.py 模块
上面的代码来源于PoseModule.py,有以下几个功能:
-
激活mediapipe的姿势检测模块。
-
检测人体。
-
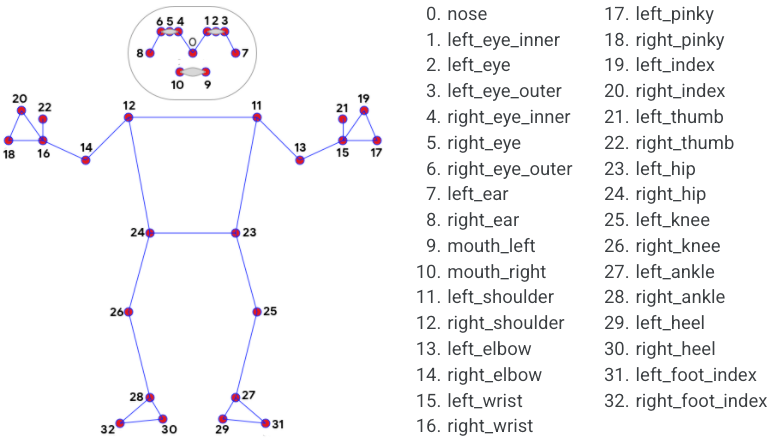
根据模型找到人体上不同肢体关节的位置。(肢体显示在上面的图片中)。
-
查找关节之间的角度(取决于你选择的关节)。对于我的俯卧撑程序,我选择找到肘部、肩部和臀部的角度,因为这些对俯卧撑动作的标准至关重要。
源码如下:
import cv2
import mediapipe as mp
import math
class poseDetector():
def __init__(self, mode=False, complexity=1, smooth_landmarks=True,
enable_segmentation=False, smooth_segmentation=True,
detectionCon=0.5, trackCon=0.5):
self.mode = mode
self.complexity = complexity
self.smooth_landmarks = smooth_landmarks
self.enable_segmentation = enable_segmentation
self.smooth_segmentation = smooth_segmentation
self.detectionCon = detectionCon
self.trackCon = trackCon
self.mpDraw = mp.solutions.drawing_utils
self.mpPose = mp.solutions.pose
self.pose = self.mpPose.Pose(self.mode, self.complexity, self.smooth_landmarks,
self.enable_segmentation, self.smooth_segmentation,
self.detectionCon, self.trackCon)
def findPose(self, img, draw=True):
imgRGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
self.results = self.pose.process(imgRGB)
if self.results.pose_landmarks:
if draw:
self.mpDraw.draw_landmarks(img, self.results.pose_landmarks,
self.mpPose.POSE_CONNECTIONS)
return img
def findPosition(self, img, draw=True):
self.lmList = []
if self.results.pose_landmarks:
for id, lm in enumerate(self.results.pose_landmarks.landmark):
# finding height, width of the image printed
h, w, c = img.shape
# Determining the pixels of the landmarks
cx, cy = int(lm.x * w), int(lm.y * h)
self.lmList.append([id, cx, cy])
if draw:
cv2.circle(img, (cx, cy), 5, (255, 0, 0), cv2.FILLED)
return self.lmList
def findAngle(self, img, p1, p2, p3, draw=True):
# Get the landmarks
x1, y1 = self.lmList[p1][1:]
x2, y2 = self.lmList[p2][1:]
x3, y3 = self.lmList[p3][1:]
# Calculate Angle
angle = math.degrees(math.atan2(y3 - y2, x3 - x2) -
math.atan2(y1 - y2, x1 - x2))
if angle < 0:
angle += 360
if angle > 180:
angle = 360 - angle
elif angle > 180:
angle = 360 - angle
# print(angle)
# Draw
if draw:
cv2.line(img, (x1, y1), (x2, y2), (255, 255, 255), 3)
cv2.line(img, (x3, y3), (x2, y2), (255, 255, 255), 3)
cv2.circle(img, (x1, y1), 5, (0, 0, 255), cv2.FILLED)
cv2.circle(img, (x1, y1), 15, (0, 0, 255), 2)
cv2.circle(img, (x2, y2), 5, (0, 0, 255), cv2.FILLED)
cv2.circle(img, (x2, y2), 15, (0, 0, 255), 2)
cv2.circle(img, (x3, y3), 5, (0, 0, 255), cv2.FILLED)
cv2.circle(img, (x3, y3), 15, (0, 0, 255), 2)
cv2.putText(img, str(int(angle)), (x2 - 50, y2 + 50),
cv2.FONT_HERSHEY_PLAIN, 2, (0, 0, 255), 2)
return angle
def main():
detector = poseDetector()
cap = cv2.VideoCapture(0)
while cap.isOpened():
ret, img = cap.read() # ret is just the return variable, not much in there that we will use.
if ret:
img = detector.findPose(img)
cv2.imshow('Pose Detection', img)
if cv2.waitKey(10) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
if __name__ == "__main__":
main()
模块二:运行主程序模块PushUpCounter.py
实际的俯卧撑计数的代码。我们使用PoseModule并确定一个俯卧撑合格与否的标准。
import cv2
import mediapipe as mp
import numpy as np
import PoseModule as pm
cap = cv2.VideoCapture(0)
detector = pm.poseDetector()
count = 0
direction = 0
form = 0
feedback = "Fix Form"
while cap.isOpened():
ret, img = cap.read() # 640 x 480
# Determine dimensions of video - Help with creation of box in Line 43
width = cap.get(3) # float `width`
height = cap.get(4) # float `height`
# print(width, height)
img = detector.findPose(img, False)
lmList = detector.findPosition(img, False)
# print(lmList)
if len(lmList) != 0:
elbow = detector.findAngle(img, 11, 13, 15)
shoulder = detector.findAngle(img, 13, 11, 23)
hip = detector.findAngle(img, 11, 23, 25)
# Percentage of success of pushup
per = np.interp(elbow, (90, 160), (0, 100))
# Bar to show Pushup progress
bar = np.interp(elbow, (90, 160), (380, 50))
# Check to ensure right form before starting the program
if elbow > 160 and shoulder > 40 and hip > 160:
form = 1
# Check for full range of motion for the pushup
if form == 1:
if per == 0:
if elbow <= 90 and hip > 160:
feedback = "Up"
if direction == 0:
count += 0.5
direction = 1
else:
feedback = "Fix Form"
if per == 100:
if elbow > 160 and shoulder > 40 and hip > 160:
feedback = "Down"
if direction == 1:
count += 0.5
direction = 0
else:
feedback = "Fix Form"
# form = 0
print(count)
# Draw Bar
if form == 1:
cv2.rectangle(img, (580, 50), (600, 380), (0, 255, 0), 3)
cv2.rectangle(img, (580, int(bar)), (600, 380), (0, 255, 0), cv2.FILLED)
cv2.putText(img, f'{int(per)}%', (565, 430), cv2.FONT_HERSHEY_PLAIN, 2,
(255, 0, 0), 2)
# Pushup counter
cv2.rectangle(img, (0, 380), (100, 480), (0, 255, 0), cv2.FILLED)
cv2.putText(img, str(int(count)), (25, 455), cv2.FONT_HERSHEY_PLAIN, 5,
(255, 0, 0), 5)
# Feedback
cv2.rectangle(img, (500, 0), (640, 40), (255, 255, 255), cv2.FILLED)
cv2.putText(img, feedback, (500, 40), cv2.FONT_HERSHEY_PLAIN, 2,
(0, 255, 0), 2)
cv2.imshow('Pushup counter', img)
if cv2.waitKey(10) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()有个需要注意的地方在第17-21行。确定从相机捕捉到的图像的分辨率,并在绘制俯卧撑计数的矩形时调整像素值,等等。(第68-82行)。
环境部署说明:
新建虚拟环境,无需安装其他框架
pip install mediapipe -i https://pypi.tuna.tsinghua.edu.cn/simple
pip install opencv-python -i https://pypi.tuna.tsinghua.edu.cn/simple