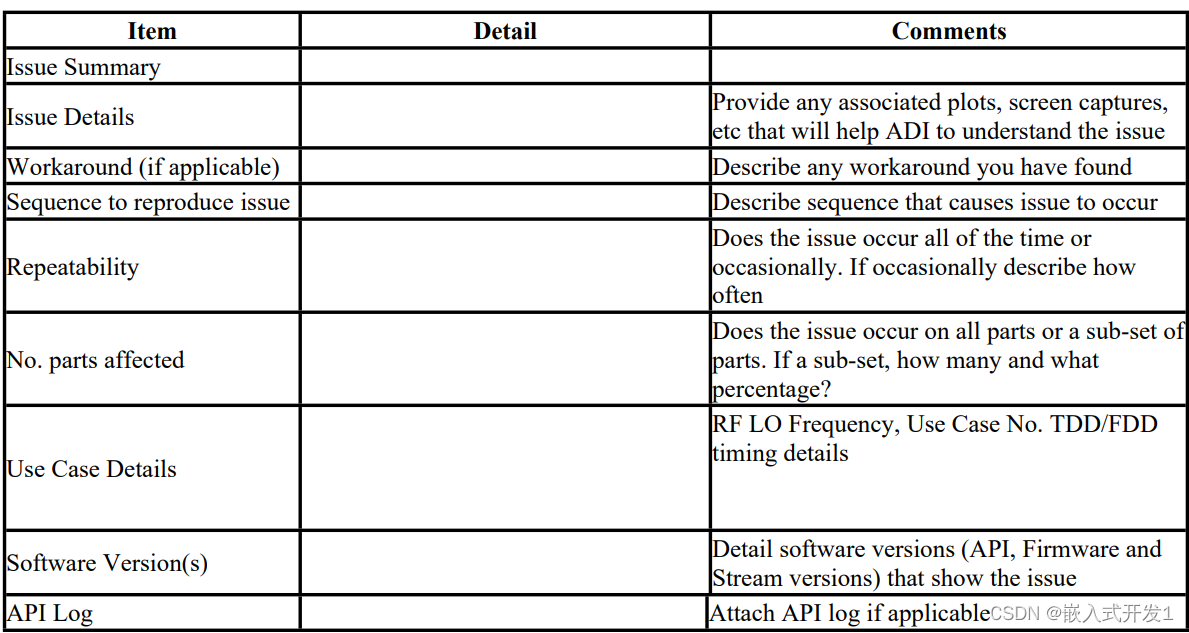
1. What information should I provide to help speed resolution of my issue?
Please provide as much detail as possible including all of the detail described in the table below
2. What are the key specifications of ADRV9026 chip?
The ADRV9026 is a 4 Transmit/ 4 Receive/ 2 Observation Receive transceiver chip supporting both TDD and FDD operation.
Local Oscillator frequency range supported currently is 650 MHz to 6 GHz (will be extended to 75 MHz to 6 GHz in 2020).
Channel Bandwidth: 200MHz Rx, 200MHz Tx large signal, 450MHz Tx Synthesis, 450MHz ORx.
Max Serdes rate: 16Gsps (operation to 25Gsps is currently sampling with release planned in 2020.)
Max Tx Output power is +7dBm with a CW signal
3. Does the ADRV9026 chip support both TDD and FDD operation? How many RF LO’s are there?
Yes ADRV9026 supports both FDD and TDD operation.
There are two RF LO’s that provide flexible connection options for the Tx and Rx channels. Hence chip can support configurations like
TDD 4T4R single band
FDD 4T4R single band .
4. Where can I find user guide and schematics for ADRV9026?
User Guide, schematics and other documentation are included in the Design File Package, available on the ADRV9026 landing page.
5. Where can I find the evaluation software for ADRV9026?
The Software Package includes the evaluation GUI software, the API source code, the firmware, and the gain tables, available on the ADRV9026 landing page.
6. What are the evaluation kits for ADRV9026?
There are two options of evaluation kits: ADRV9026-HB/PCBZ for high-band matching 2.8GHz to 6GHz and ADRV9026-MB/PCBZ for mid-band matching 650MHz to 2.8GHz. Both work with the ADS9-V2EBZ as motherboard. Please visit the ADRV9026 EVB page for more information.
7. Does ADRV9026 support MC-GSM?
No, The device supports small cell base station radios, macro 3G/4G/5G systems, and massive multiple in/multiple out (MIMO) base stations
8. Does ADRV9026 support internal DPD?
No. ADRV9026 does not have internal DPD. It supports observation receive with 450 MHz bandwidth for implementing external DPD. A Future version will support internal DPD.
9. Can ADRV9026 support fast frequency hopping?
The current ADRV9026 has not been optimized for frequency hopping but this feature will be added in the future software upgrades.
10. Can ADRV9026 support external LO?
The current ADRV9026 doesn’t support external LO but this feature will be added in the future software upgrades.
11. Will ADRV9026 support 5G operation?
Yes, the ADRV9026 has RF performance specifications to enable 5G applications and supports TX and RX minimum on times down to 100us to enable 5G TDD operation.
12. What is the typical power consumption of ADRV9026 in TDD and FDD mode?
The power consumption depends on the programmed configuration. Typical power consumptions are~5W for TDD mode and ~7W for FDD operation for 200MHz primary BW.
13. ADRV9026 supports both JESD204B and JESD204C, Will there be a difference in clocking (Device clock and SysRef) for JESD204C? Can AD9528 support both JESD204B and JESD204C?
The device clock and SYSREF are both required for JESD204B and JESD204C operation – there is no difference in the physical clocking requirement for the two modes. The AD9528 clocking device on the EVB can support both JESD204B and JESD204C operation.
14. How much is the typical boot-up time and initial calibration time for ADRV9026
Typical boot-up time for the part is ~4sec, dependent on SPI clock rate. The time required for initialization calibrations varies depending on the use case. In JESD204B use cases, it is ~4sec per enabled channel, so for 4 channels, it takes about 16 sec.
The ADI evaluation platform currently has a longer boot up time which is unrelated to the ADRV9026 boot time. It takes approximately 3 minutes for bootup. Check for Red LED on the MicroZed going off which indicates boot up is complete.
15. Can customers create custom profile? Is there a configuration wizard available?
Currently customers must use the provided profiles – a configuration wizard will become available in a later release. Please note only the use cases included in the Windows GUI are currently supported until the filter configuration wizard is available later 2020.
16. Does ADRV9026 support RF PLL phase sync? What is the phase accuracy of TX ports? RF PLL phase sync is supported on the ADRV9026.
The initial phase sync accuracy is 0.9ps.
17. Will ADI provide reference software in Wiki page (linux and No-OS) like for other transceivers?
Currently the prototyping software (Linux & No-OS) is not available on wiki.
18. For TDD operation what is the minimum ON period required for Tx and Rx for tracking calibrations?
Minimum ON time for both TX and RX tracking calibrations to progress is 100us.
19. What is the resolution of ADC and DAC used in Tx/Rx and Orx path? What is the dynamic range of Rx chain? What’s the max sampling rate of ADC and DAC?
Tx path DAC is 14 bits, Rx/Orx path ADCs are 16 bits. Rx SFDR is 81dBc.
DAC max rate 2.5Gbps and ADC max rate 5Gbps.
20. Where can I find S-parameter files and JESD simulation files? S-parameters and JCOM model for JESD simulations are part of the design file package available on the ADRV9026 landing page.
JCOM: Requires customers to have Matlab plus RF toolbox JCOM reads touchstone files and uses a few Matlab functions, but it could be moved to other ecosystem (such as python).
21. How much insertion loss is supported for 25G Serdes link?
ADI is currently validating insertion loss ranges from 8-15dB. Future releases are expected to expand this range from 2 to 20dB. For insertion loss ranges beyond 8-15dB please contact ADI for specific recommendations.
22. What gain control modes are supported on Rx?
ADRV9026 supports both manual gain control (MGC) and automatic gain control (AGC) modes
23. Does ADRV9026 support AGC operation where gain update counter is larger than the Rx time slot in TDD?
Yes ADRV9026 does support this AGC mode
24. Does ADRV9026 support sharing framer for both Rx and ORx channels?
Yes ADRV9026 supports link sharing mode, where both the Rx and ORx used the same JESD framer link. This mode is useful for TDD applications.
25. Does ADRV9026 support ADC crossbar control using ORx_EN pin in link sharing mode?
Yes, the user can enable the feature where they can set the ADC crossbar to ORx channel when ORx_EN goes high and restore the cross bar to Rx channel when ORx_EN goes low.
26. What’s the package of ADRV9026?
14 mm x 14 mm 289-ball BGA