往期周报汇总地址:嵌入式周报 - uCOS & uCGUI & emWin & embOS & TouchGFX & ThreadX - 硬汉嵌入式论坛 - Powered by Discuz!
祝大家开工大吉
视频版:
https://www.bilibili.com/video/BV1GT411o7zr
1、ThreadX老大离开微软,开发的第5代RTOS系统PX5 RTOS正式上线
最早是看到IAR的一条消息,全面支持PX5 RTOS,然后就进一步上他们的官方下载白皮书了解相关消息
当看到这两个名字时,很熟悉,这不就是ThreadX的老大Bill Lamie。
经过信息检索,应该是实锤了,领英上已经更新了他的工作经历:

然后再结合Azure ThreadX全家桶最近的更新记录中,应该确实是离开了
/* DATE NAME DESCRIPTION */
/* */
/* 05-19-2020 William E. Lamie Initial Version 6.0 */
/* 09-30-2020 Yuxin Zhou Modified comment(s), */
/* resulting in version 6.1 */
/* 04-25-2022 Scott Larson Modified comment(s), */
/* handle 0 flags case, */
/* resulting in version 6.1.11 */
/* 10-31-2022 Scott Larson Modified comment(s), always */
/* return actual flags, */
/* resulting in version 6.2.0 */
/* */Bill Lamie开发最早的系统Nucleus RTOS,当前是西门子在维护,然后就是现在的ThreadX全家桶,微软全面接管维护了,核心部分已经比较成熟,当前主要是功能的拓展和完善。
这次又有了新的想法并付诸实现,开始PX5 RTOS全新玩法,继续引领RTOS潮流。
PX5 RTOS - Embedded IoT Development
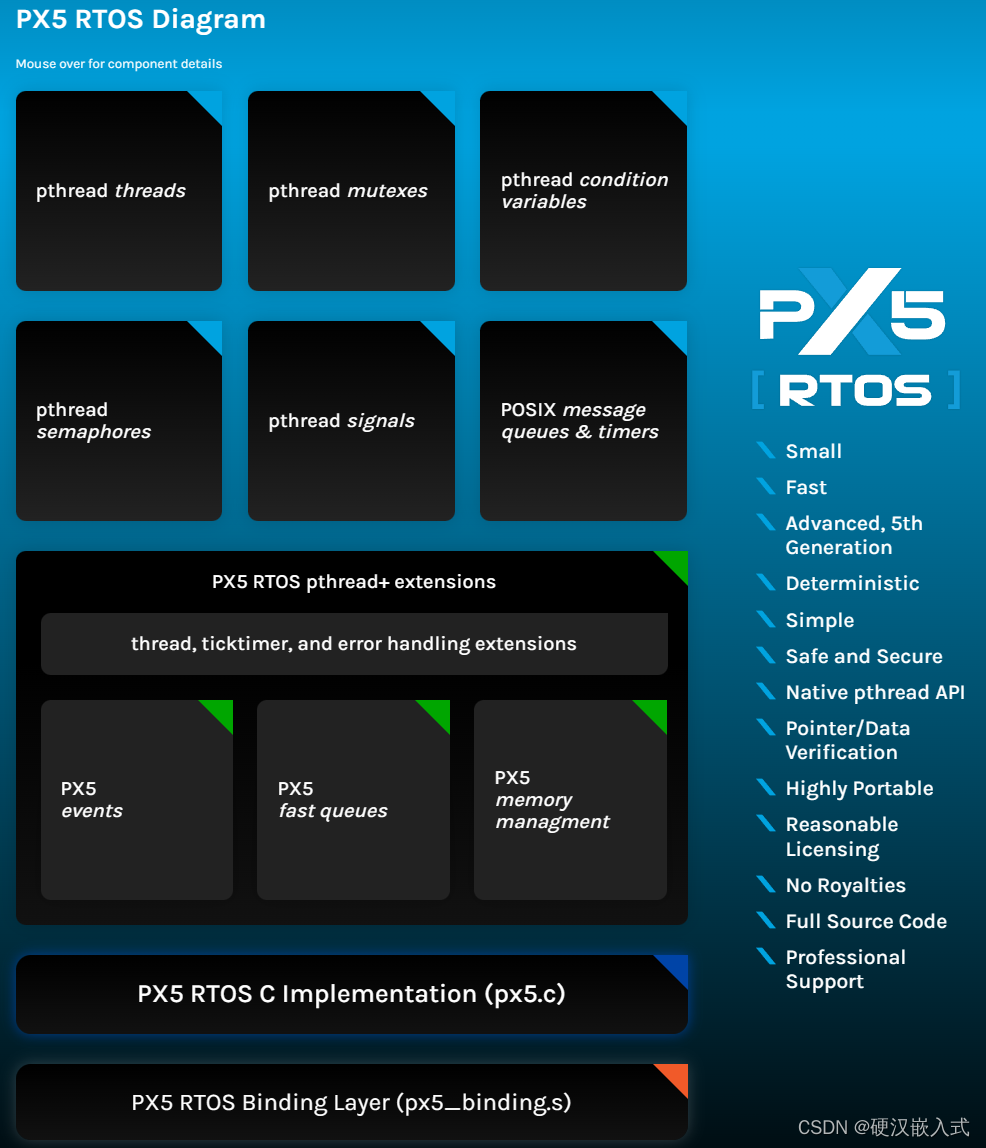
简单了解了下PX5的特色
(1)Flash和RAM最小需求都小于1KB。
(2)原生支持POSIX,这样各种基于POSIX编程的应用都可以互通移植,而还提供了拓展,专为深度嵌入式实时应用而设计。
(3)PX5 RTOS 还提供内存保障技术PDV,这是一种独特的技术,可实现运行时函数指针、链表和堆栈验证。最后,集中错误处理,有助于构建更强大的应用程序。
PX5-RTOS-User-Guide-jan-2023.pdf (1.90MB)
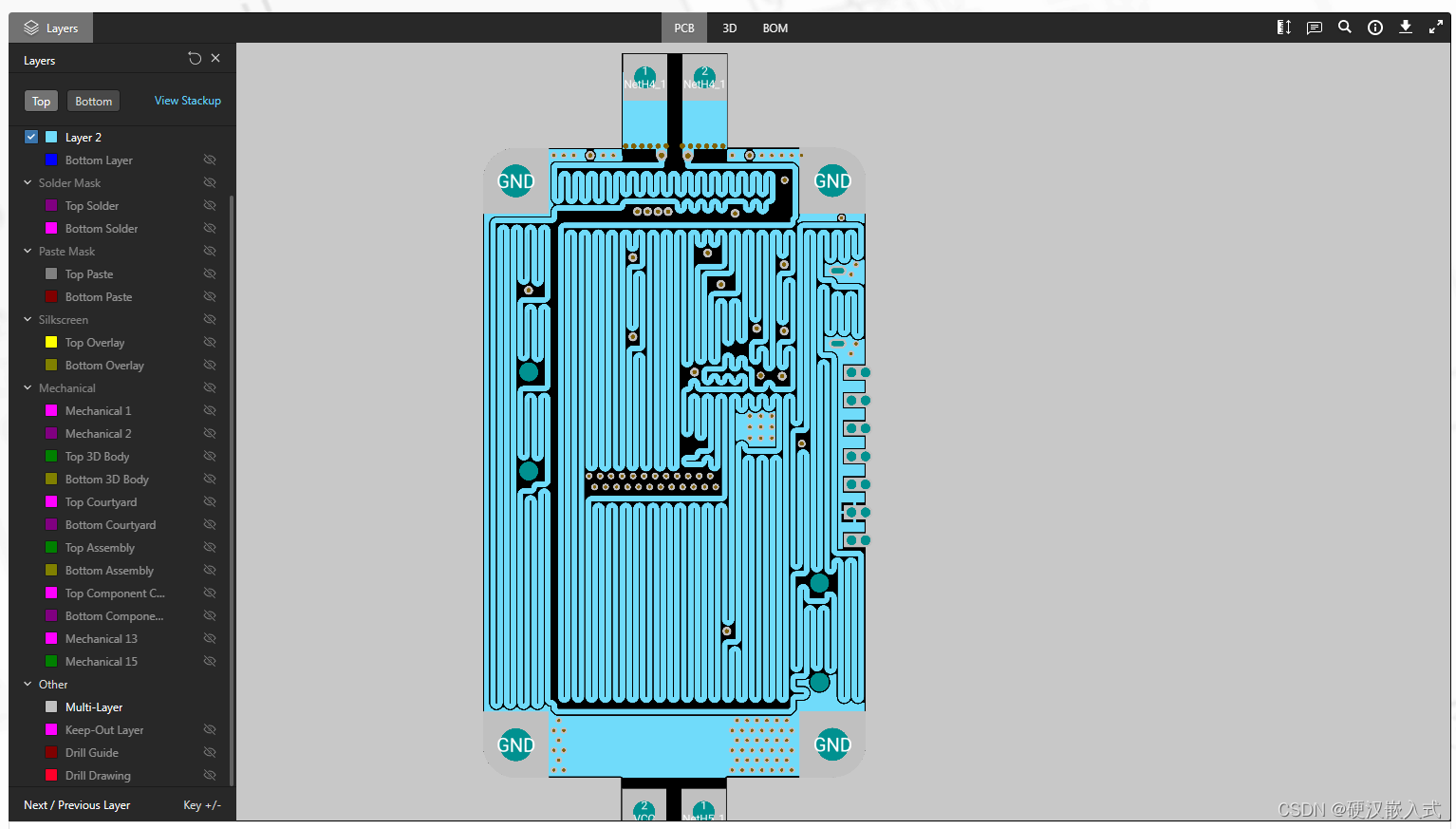
2、支持回流焊的自焊接PCB板设计
作者:Carl Bugeja
GitHub - CarlBugeja/Open-Reflow: A controller for self-reflowing PCBs
用户手动焊接好一个此PCB板子后,这个板子就是回流焊控制器,然后就可以用这个板子控制其它板子做回流焊了,因为这个板子经过了特别设计,专门开一个加热层
动图:
整体效果:
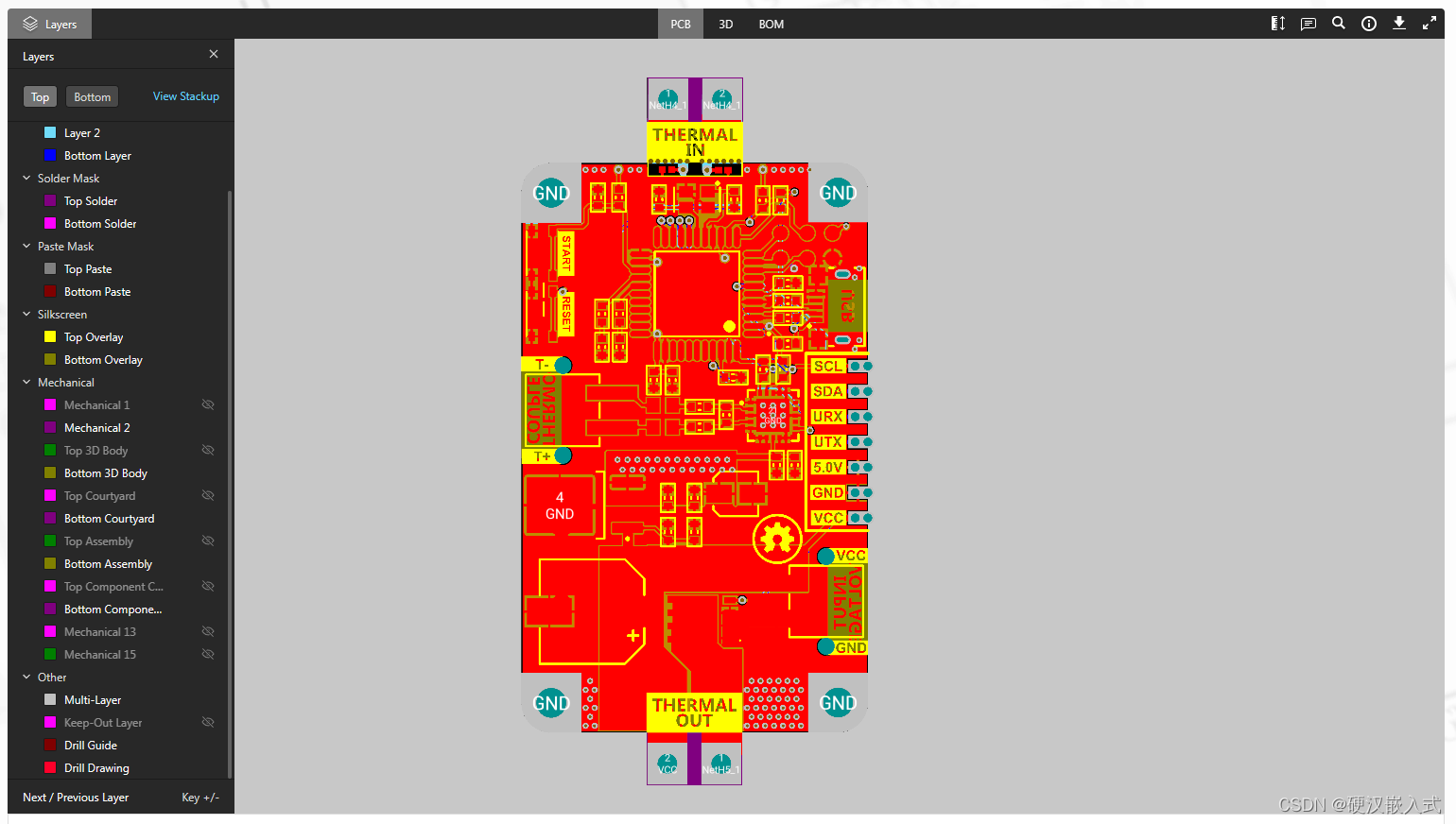
焊接加热层
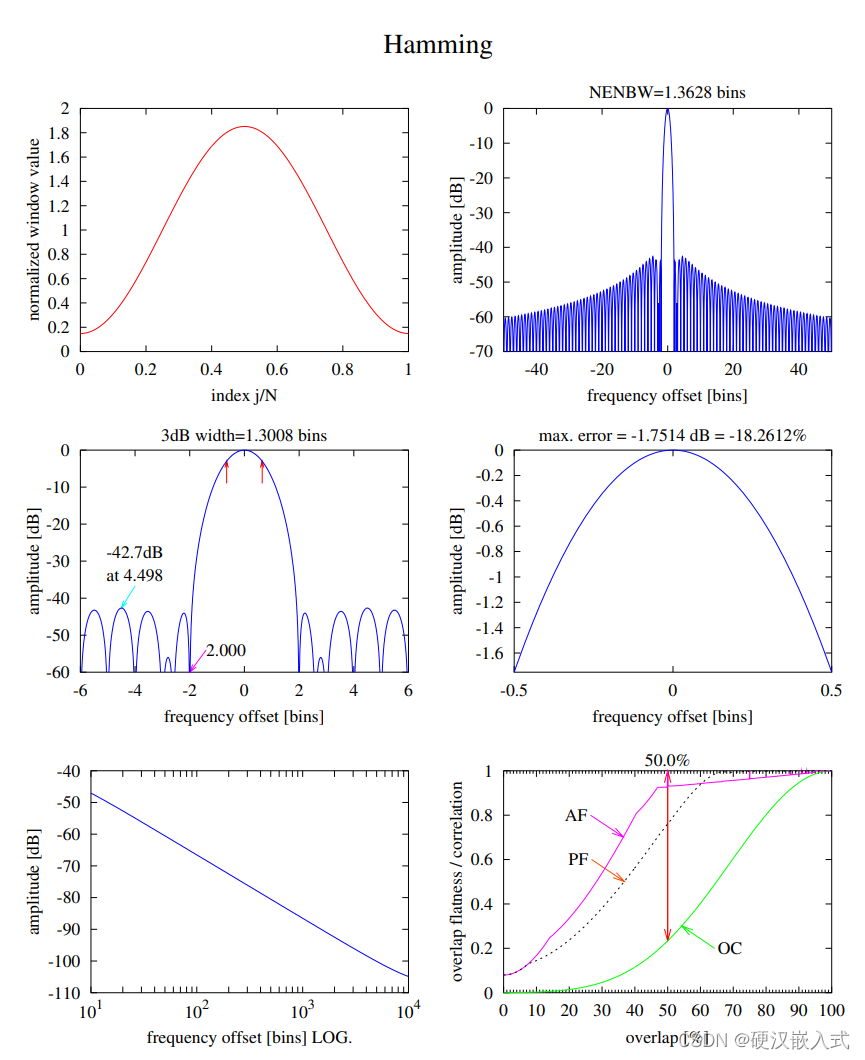
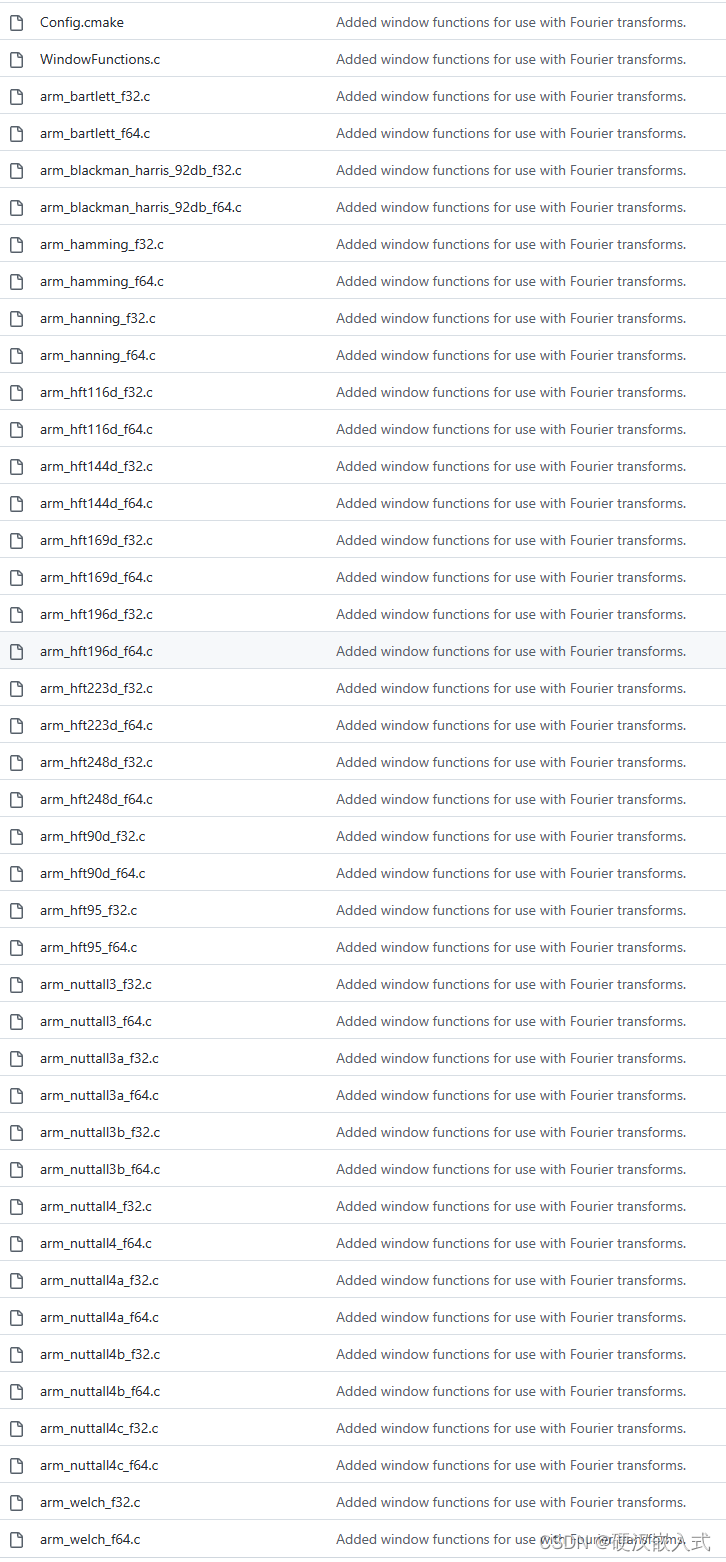
3、ARM的DSP库发布V1.14.3版本,大批的FFT窗口函数已经正式上线供用户使用
Releases · ARM-software/CMSIS-DSP · GitHub
ARM.CMSIS-DSP.1.14.3.pack (7.58MB)
之前给大家分享过这个效果,从V1.14.3版本正式带上了,后面使用FFT做各种窗函数处理就方便多了。
传统的汉明hamming窗,布莱克曼blackman窗,Nuttall窗,welch窗,新增的hft窗。
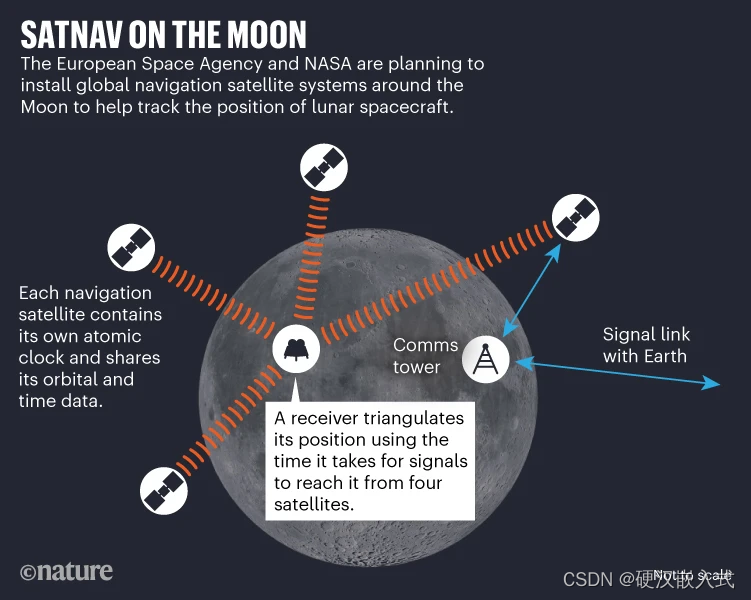
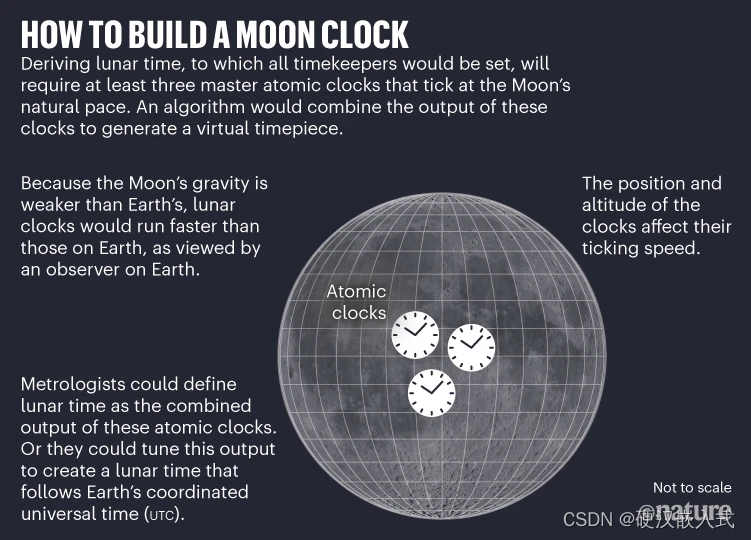
4、nature自然杂志发布的一篇有意思的文章,月球上几点了
What time is it on the Moon?
科学家和航天机构尚未就如何定义月球时间达成一致,定义月球时间并不简单。
尽管秒的定义在任何地方都是一样的,但狭义相对论规定,时钟在更强的引力场中滴答得更慢。月球的引力比地球弱,这意味着,对于地球上的观察者来说,月球时钟会比地球时钟运行得更快。
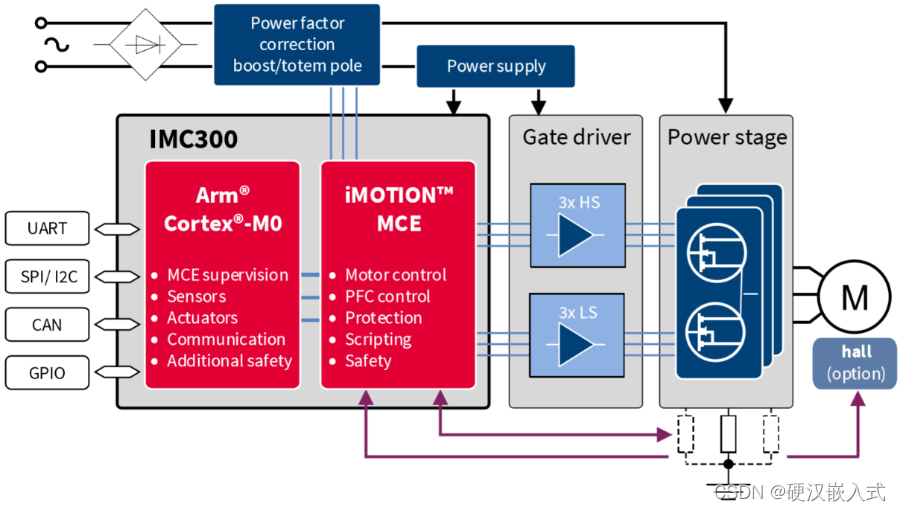
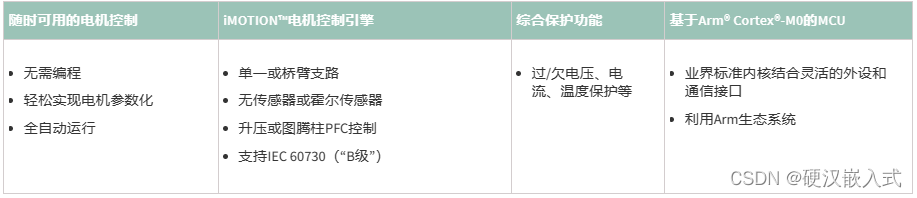
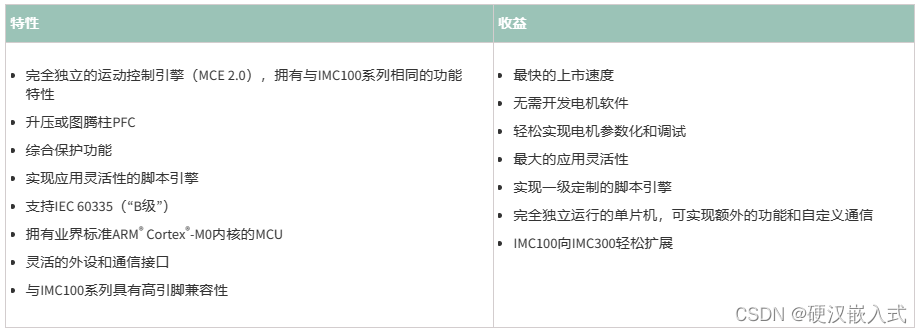
5、英飞凌推出无需编程,轻松实现电机参数化,全自动运行电机/PFC控制器IMC300
IMC300 Series - Infineon Technologies
特色是最快的上市速度,无需开发电机软件,轻松实现电机参数化和调试,因为已经集成了运动控制引擎,并且集成了M0内核。
IMC300系列中的MCE既能控制无传感器控制电机,也能控制传感器(如模拟或数字霍尔传感器)控制电机,并且拥有适用于升压和图腾柱PFC应用的现成算法。IMC300既可以是独立的电机控制,也可以是电机控制加PFC控制,采用LQFP-48或LQFP-64封装。所有器件都可用于要求功能安全性达到UL/IEC 60730(“B级”)标准的应用。
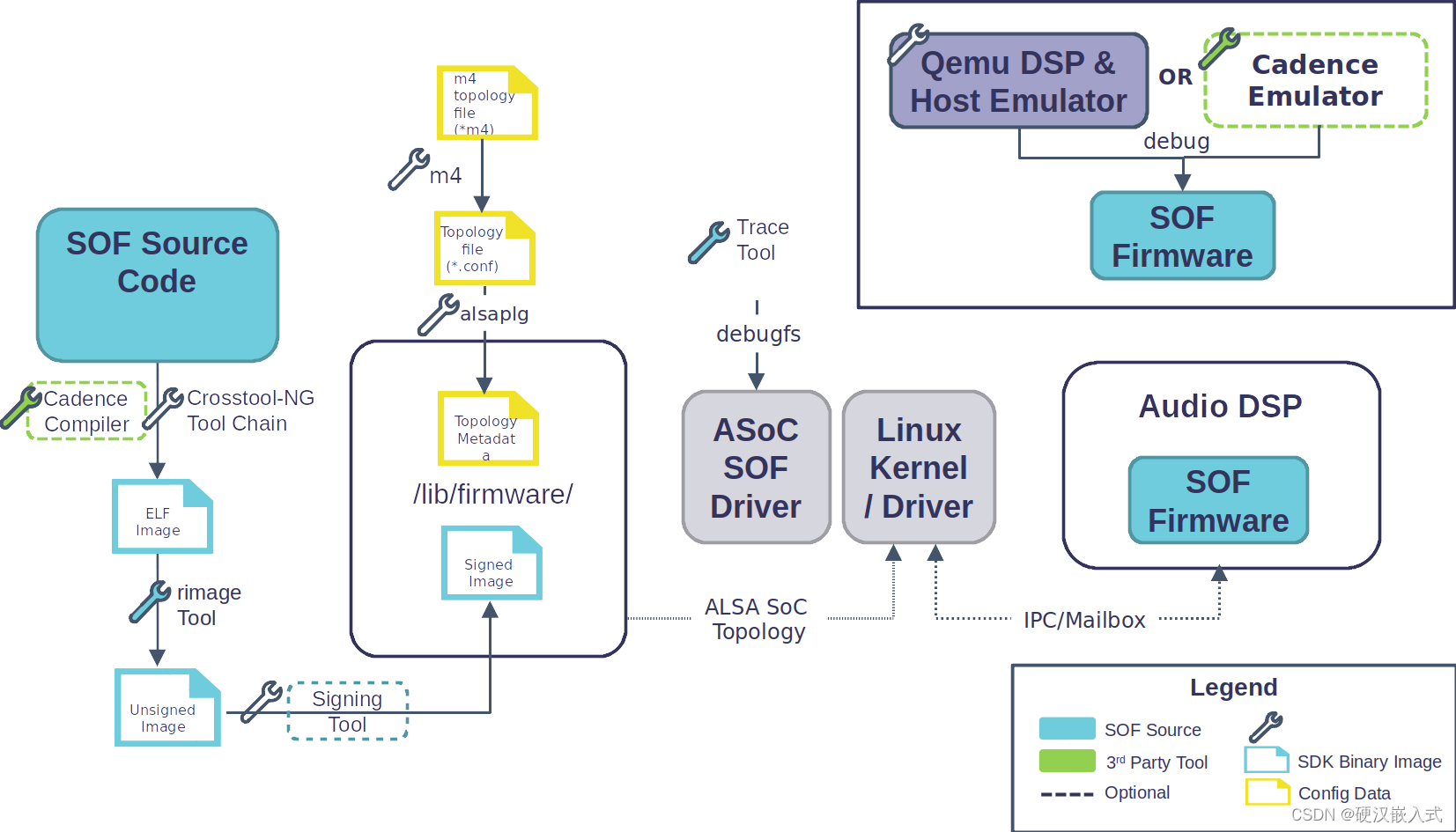
6、声音开放固件Sound Open Firmware 2.4.1 继续向 Zephyr RTOS 过渡
Introduction to the SOF Project — SOF Project 2.4.1 documentation
https://github.com/thesofproject/sof
作为此开源音频的第一个稳定 v2.4 版本,不仅适用于英特尔平台,也适用于AMD、联发科和其他不断增长的行业使用。通过Sound Open Firmware 2.4,他们继续过渡到使用Zephyr RTOS。
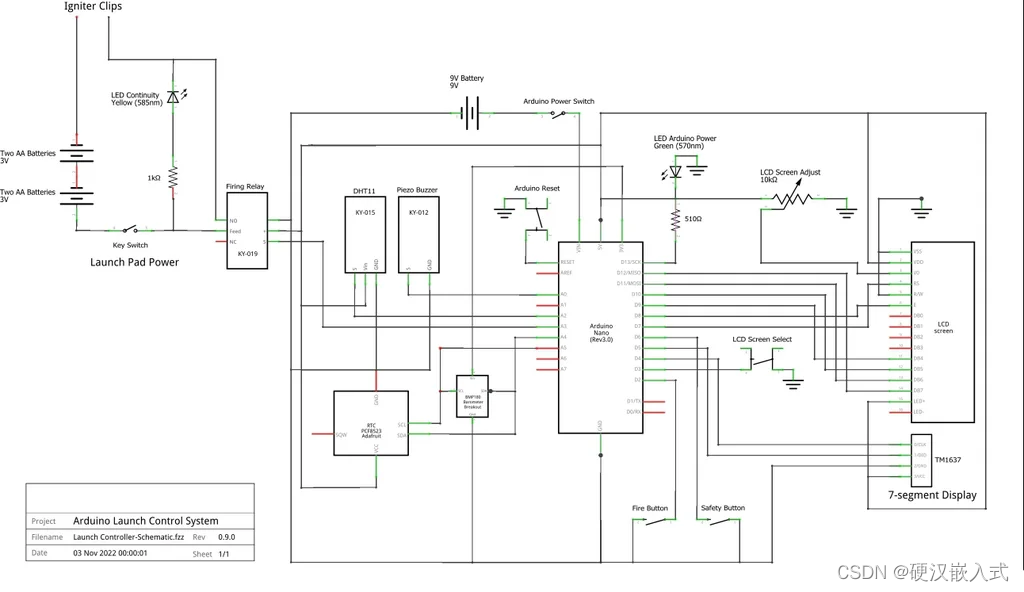
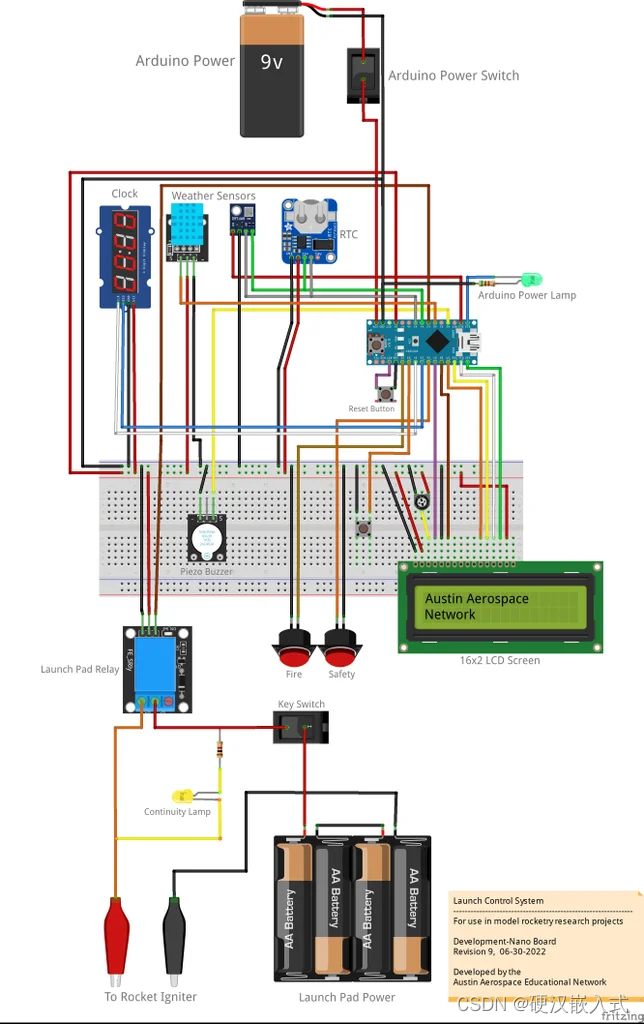
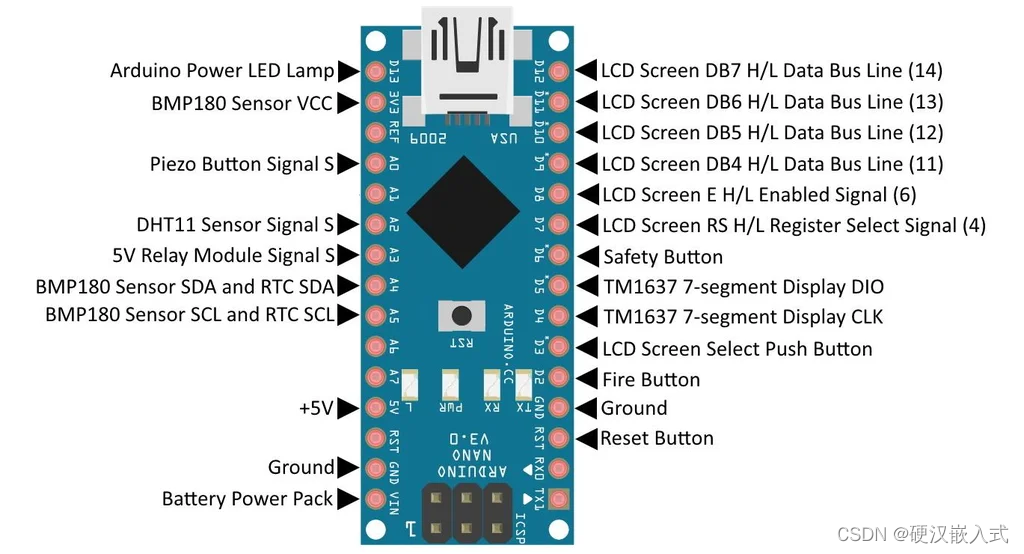
7、基于Arduino的火箭模拟控制系统
The Arduino Launch Control System (LCS) : 10 Steps (with Pictures) - Instructables
大家有兴趣可以看看

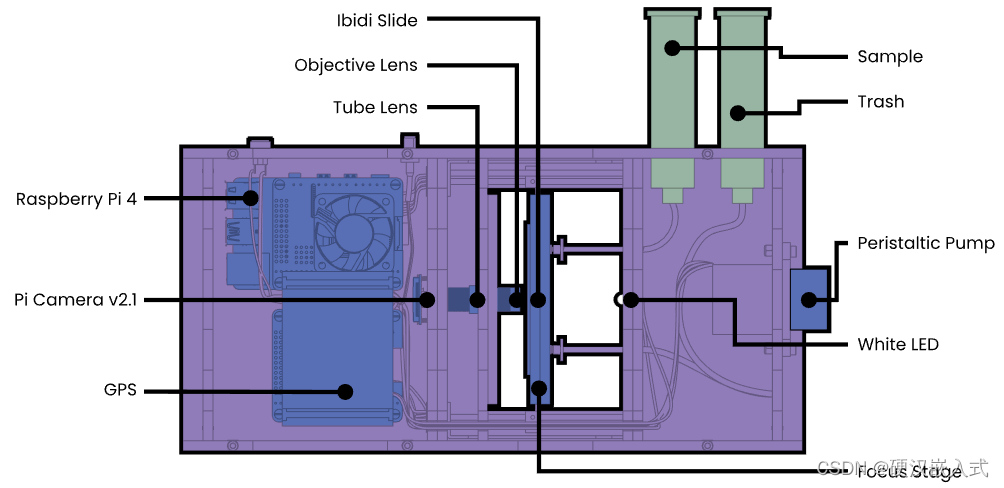
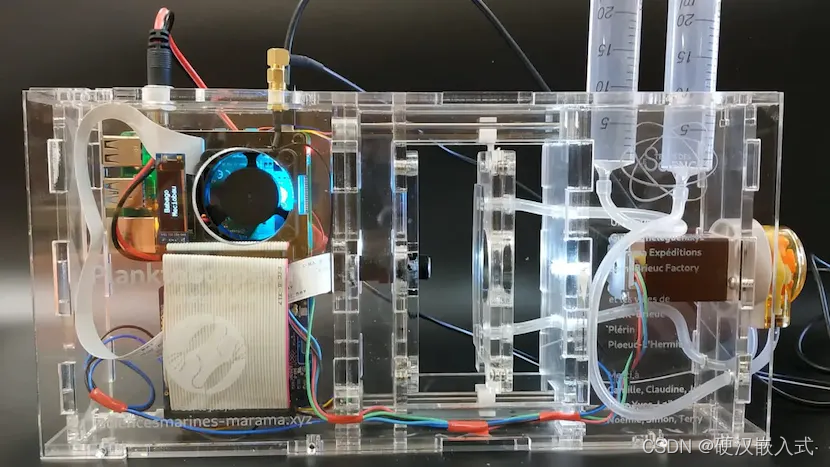
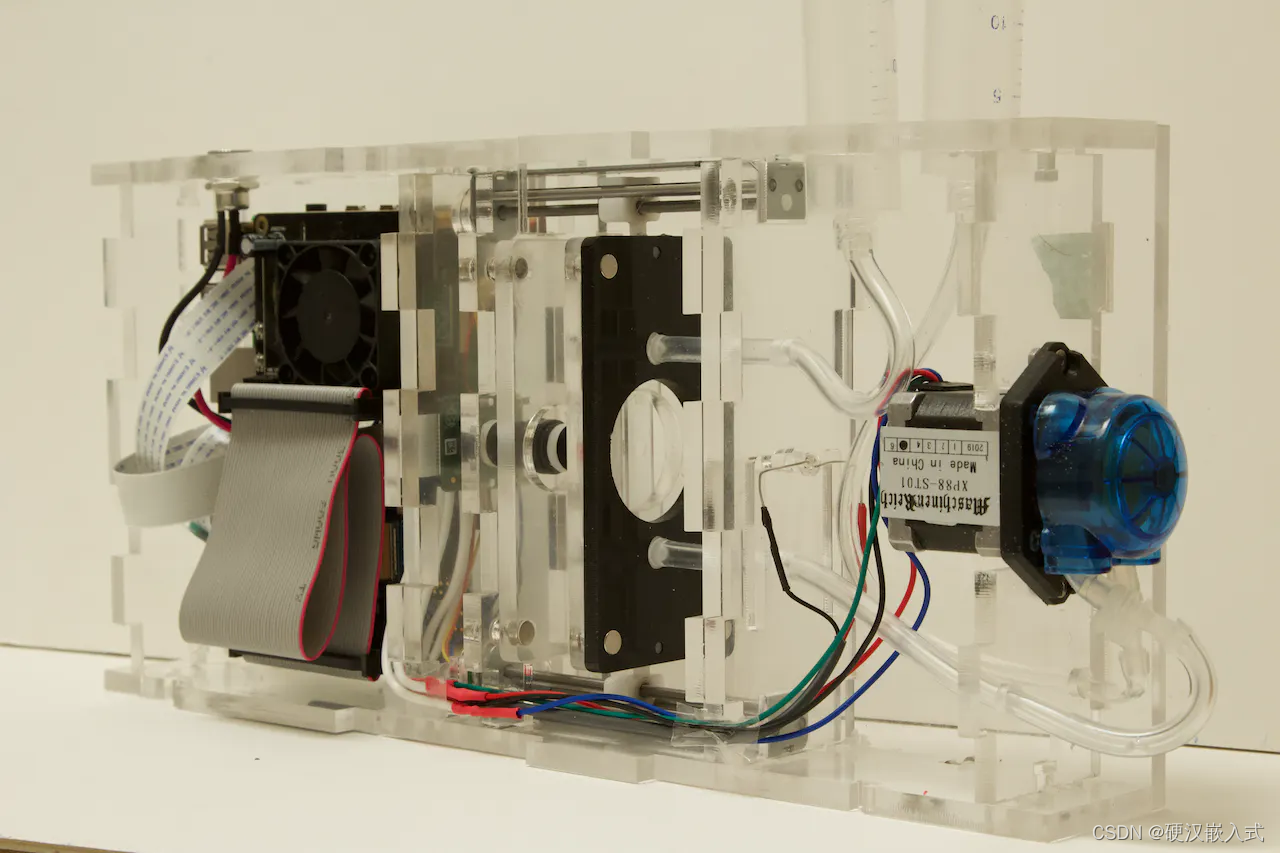
8、开源的浮游生物监测分析设备PlanktoScope
PlanktoScope
GitHub - PlanktoScope/PlanktoScope: Open and Affordable Quantitative Imaging Platform
浮游生物帮助修复了世界上30-50%的二氧化碳,并为全球食物链奠定了基础,浮游生物在穿越海洋时构成了世界上最大的生物质日常运动。这些数十亿生物的形状、颜色和运动就像维持它们的海洋一样广阔。了解浮游生物对于了解我们周围的世界以及我们对这个世界的影响至关重要。
这类研究的一个障碍是要探索的区域规模庞大,以及研究车队和专业设备的资源有限。通过开发一种扩大高质量视觉探索和文档的方法,我们可以大大增加我们对周围复杂生命网络的理解,以及我们反过来如何影响它。
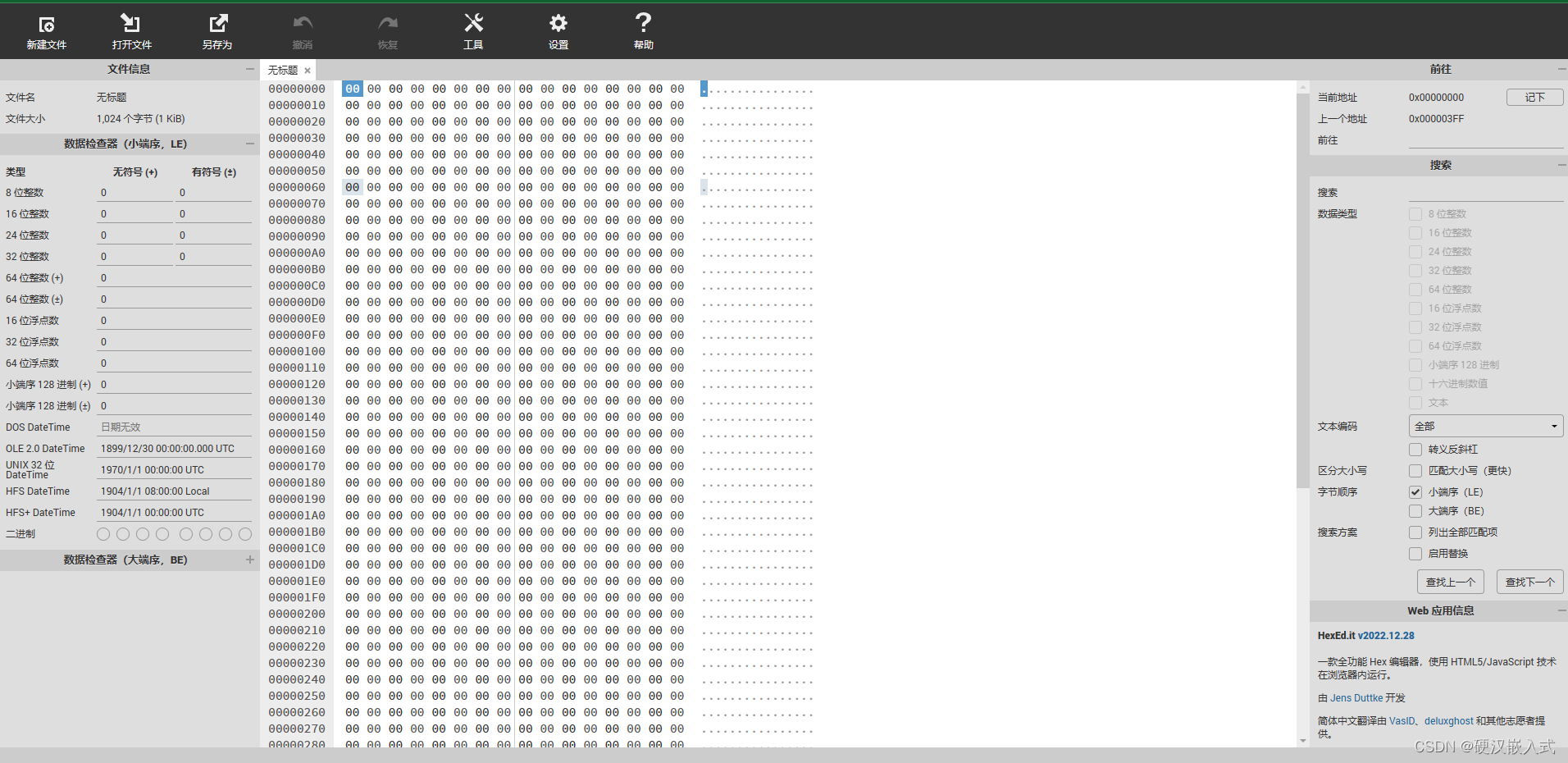
9、网页版hex编辑器hexed
HexEd.it - Browser-based Online and Offline Hex Editing
效果还不错,大家有兴趣可以试试,网页版的优势就是方便
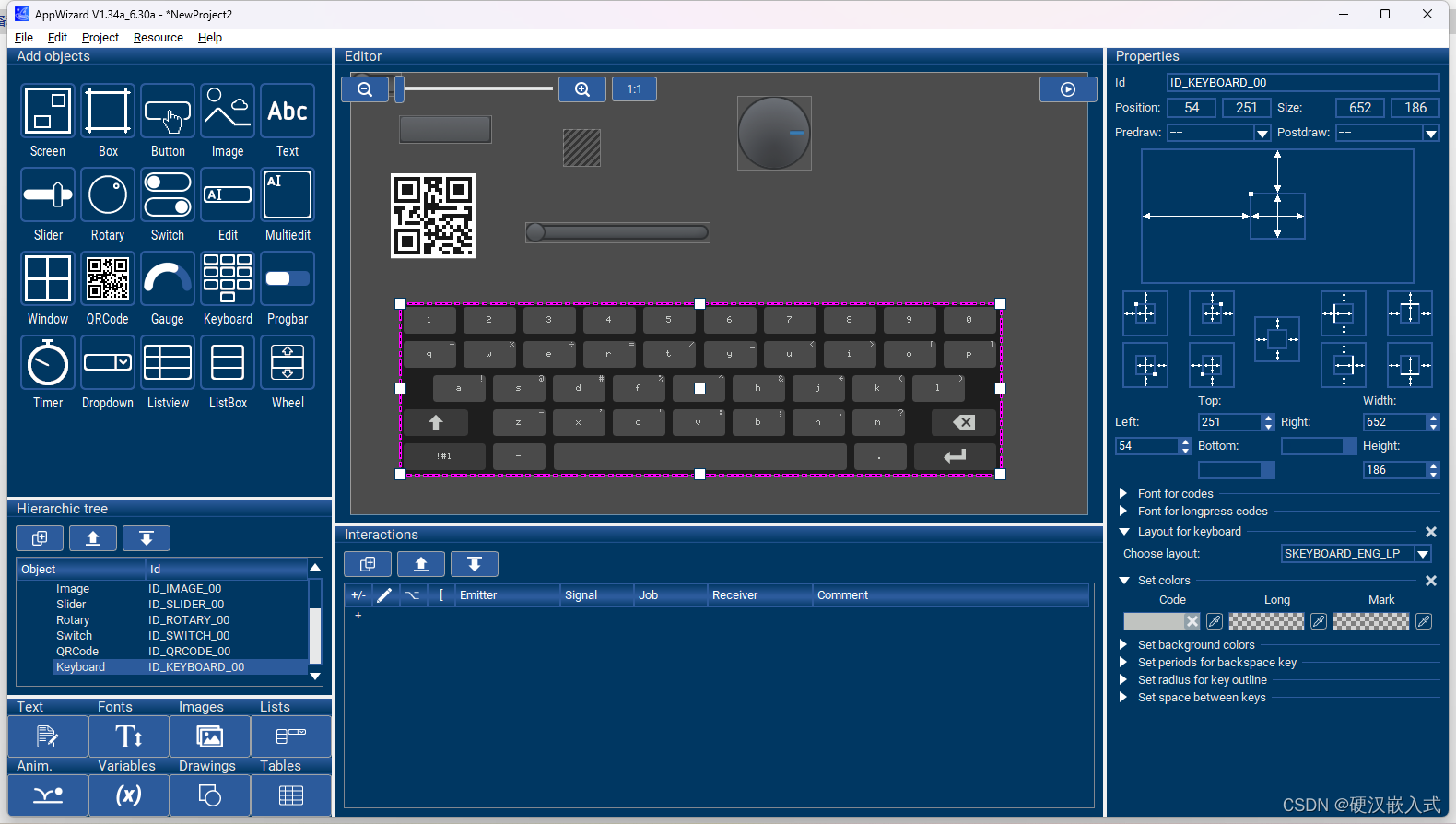
10、emWin6.30单片机版本发布,对应AppWizard也可以使用最新的1.34a了
Keil.MDK-Middleware_Graphics.1.2.0.pack (118.59MB)
关于emWin6.30更新内容,此贴进行了说明:
emWin模拟器V6.30发布,推出新版视频转换小软件MakeMovie,VNC软件开始支持网络和USB两种玩法(2022-12-03)
emWin模拟器V6.30发布,推出新版视频转换小软件MakeMovie,VNC软件开始支持网络和USB两种玩法(2022-12-03) - uCOS & uCGUI & emWin & embOS & TouchGFX & ThreadX - 硬汉嵌入式论坛 - Powered by Discuz!
11、单色屏实现多级灰度播放视频效果
作者Wenting
https://www.zephray.me/post/grayscale_lcd/
正常情况下,我们实现单色屏如下效果,仅有两种颜色
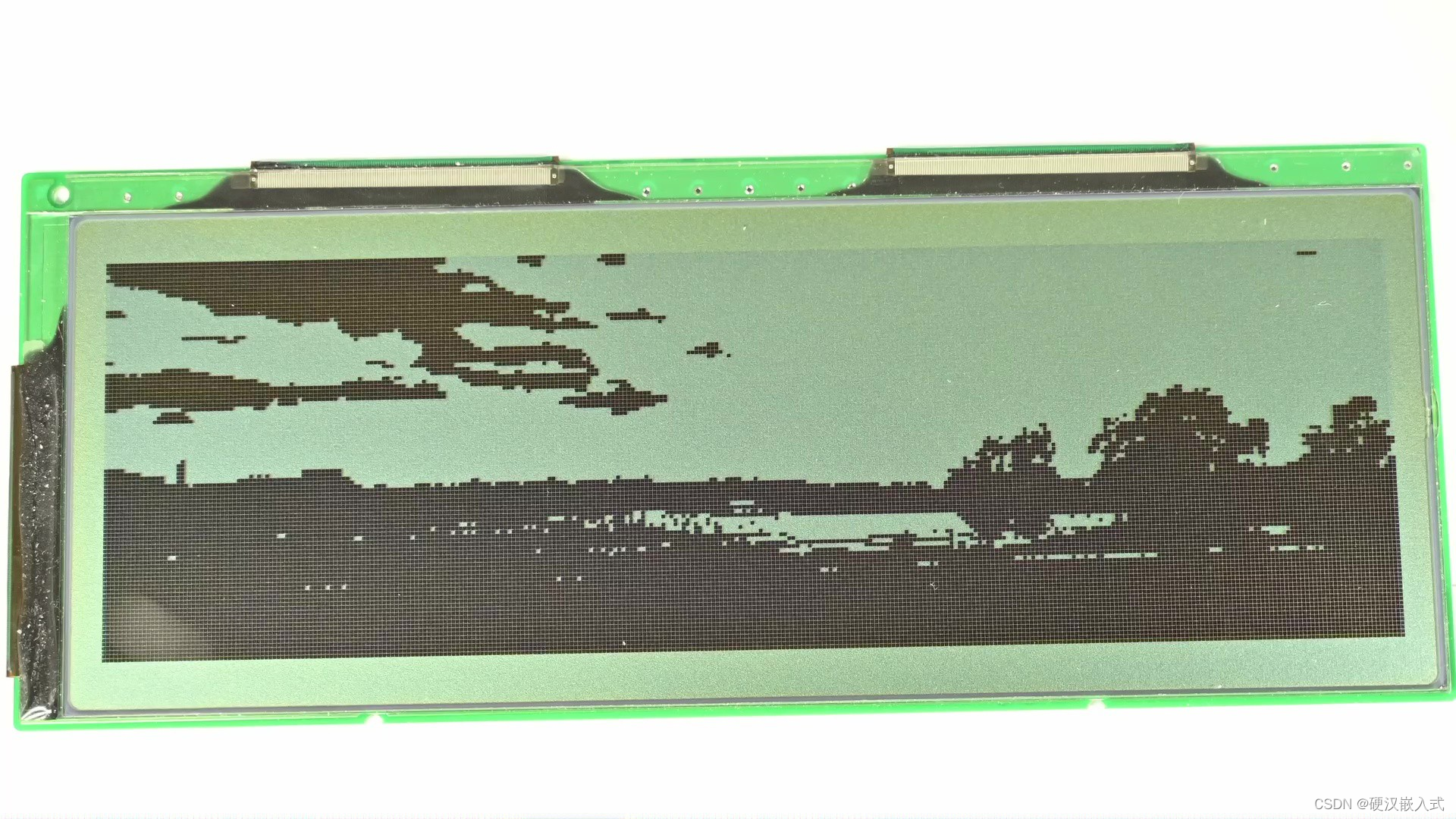
根据作者研究市面上的产品,很多电子产品查看后,也是用的单色屏做的多级灰度展示,这是怎么实现的,作者就是对此进行了研究实现
通过PWM调制实现了一定的灰度展示
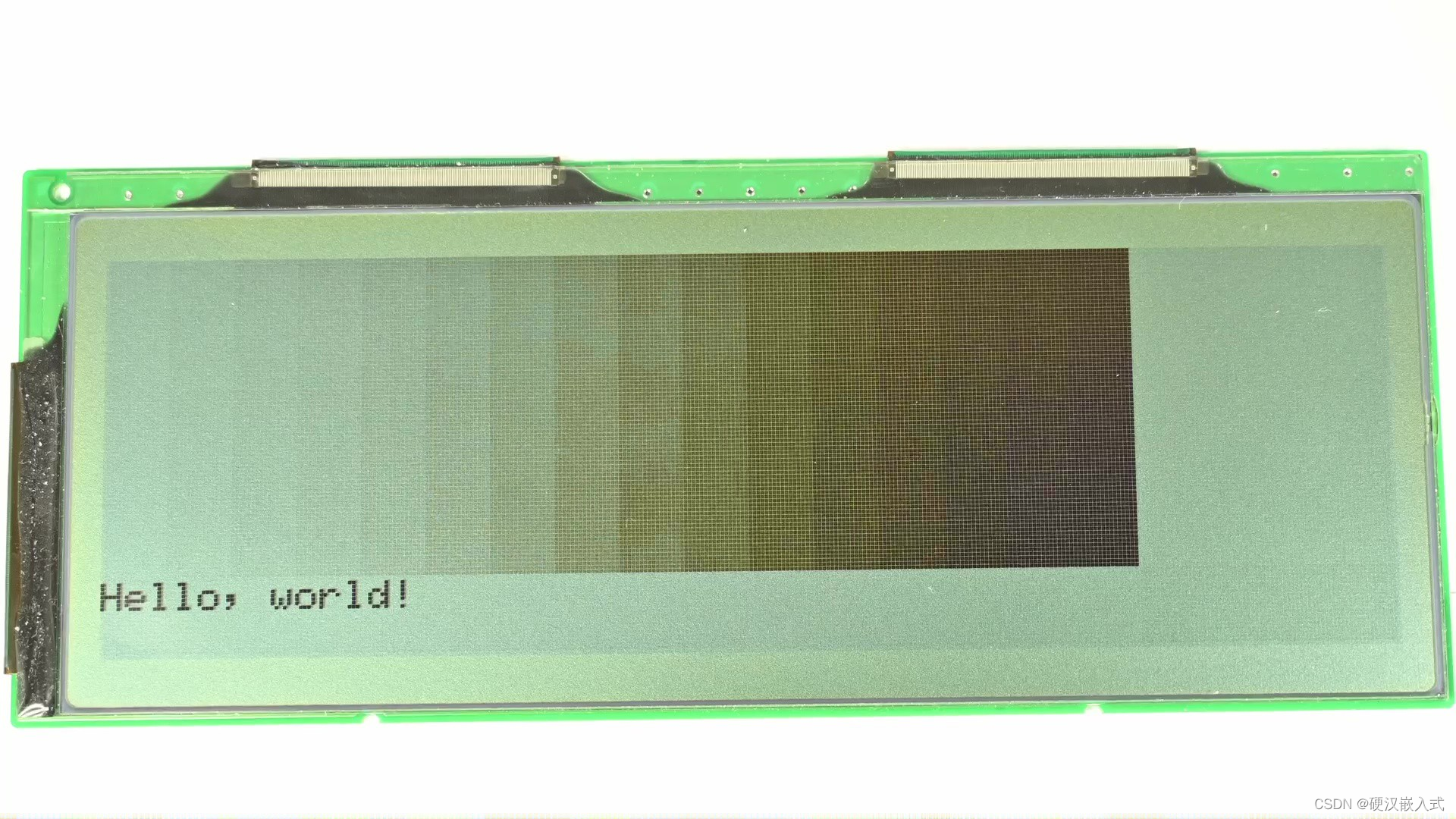
但是效果不过好,进一步优化后,效果强了很多
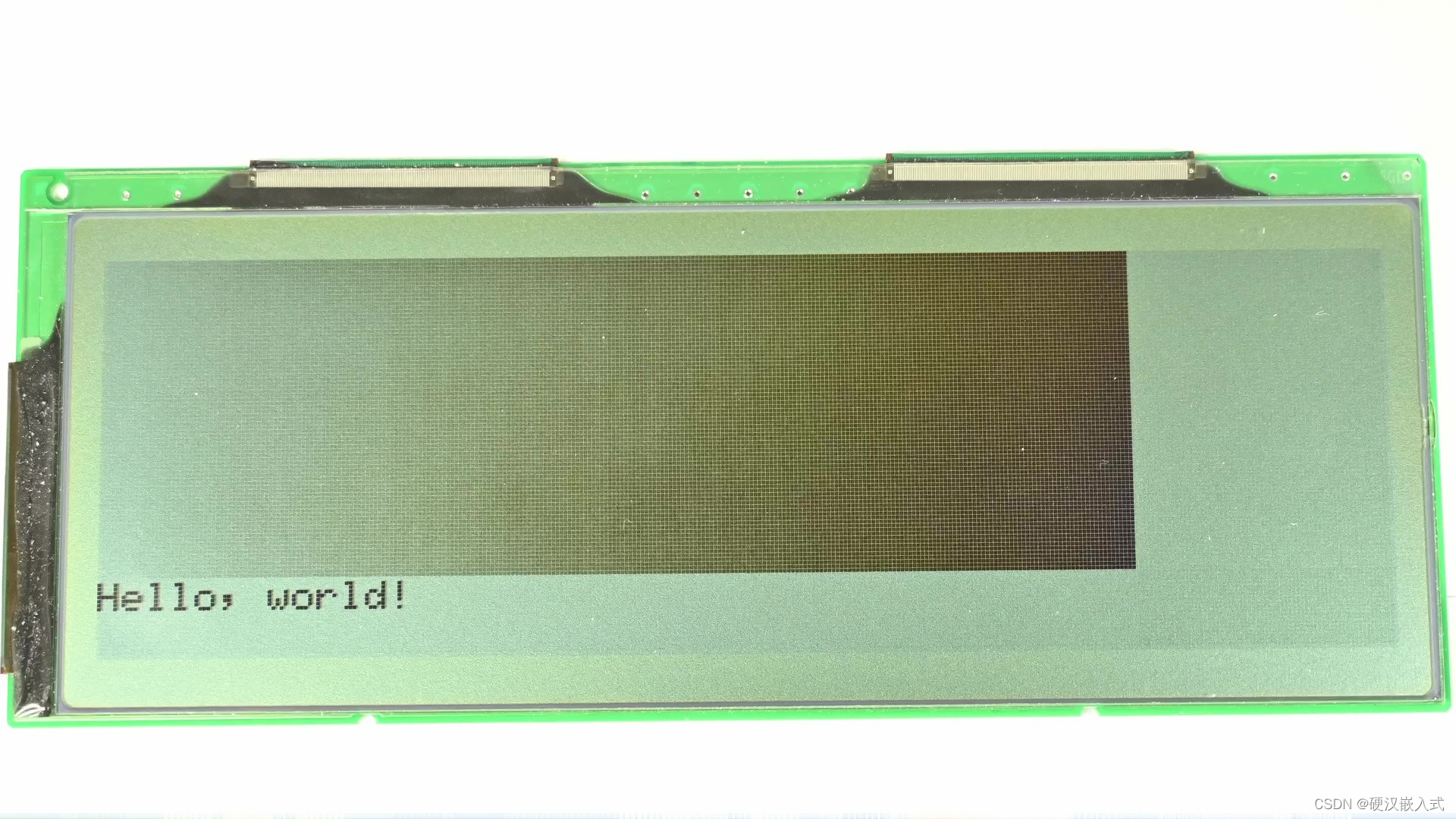
播放视频的效果真是超流畅
12、C语言实现面向对象编程文档
这个实际上属于C的高级玩法了,大家有兴趣可以看看
https://www.cs.rit.edu/~ats/books/ooc.pdf
13、新版的GCC V13.0已经正式支持Cortex-M85
上周发布周报忘了细看更新记录,今天细看了下,已经全面支持
https://gcc.gnu.org/git/?p=gcc.git;a=shortlog;pg=1

14、H7-TOOL本周进展
H7-TOOL详细介绍:H7-TOOL开发工具,1拖4/16脱机烧录,高速DAPLINK,RTOS Trace,CAN/串口助手, 示波器, RTT等,支持WiFi,以太网,高速USB和手持 - H7-TOOL开发工具 - 硬汉嵌入式论坛 - Powered by Discuz!
(1)全力加速准备H7-TOOL下个版本V2.20发布,RTOS Trace首版和截图功能将在这个版本上线
近期这几天将全部用来准备H7-TOOL新版的发布工作。
(2)H7-TOOL的TVCC从3.3V输出设置到1.2V需要的时间测量
测试目的:
方便大家使用SPI,SWD,I2C,GPIO,UART等控制电平范围设置后,需要等待这么一段时间再开启通信。
TOOL上电默认是3.3, 比如要设置为1.2V通信,那么调用LUA函数TVCC电压配置后,最好调用delayms延迟下,否则不是想要的1.2V。
1、使用LUA小程序就可以方便的测量,代码如下:
print("TVCC从3.3V输出设置到1.2V需要的时间测量")
gpio_cfg(0, 1) --配置模式D0 = 1-GPIO_OUT
gpio_write(0, 1) --设置输出D0 = 1
delayms(10) -- 等待10ms
gpio_write(0, 0) --设置输出D0 = 0
set_tvcc(1.2)
gpio_write(0, 1) --设置输出D0 = 1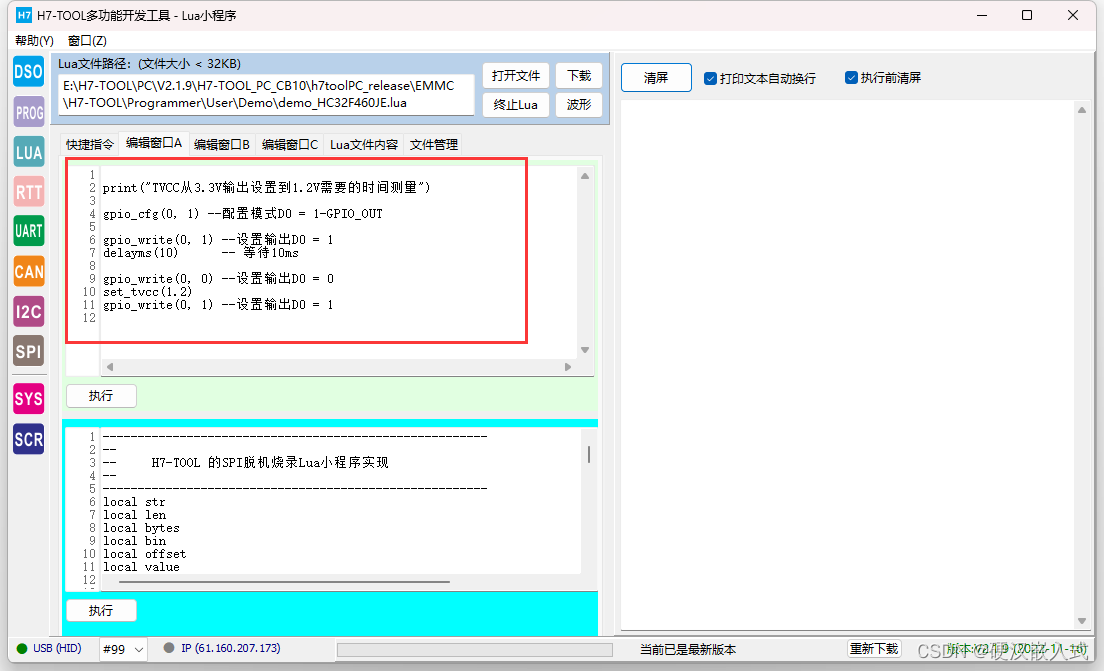
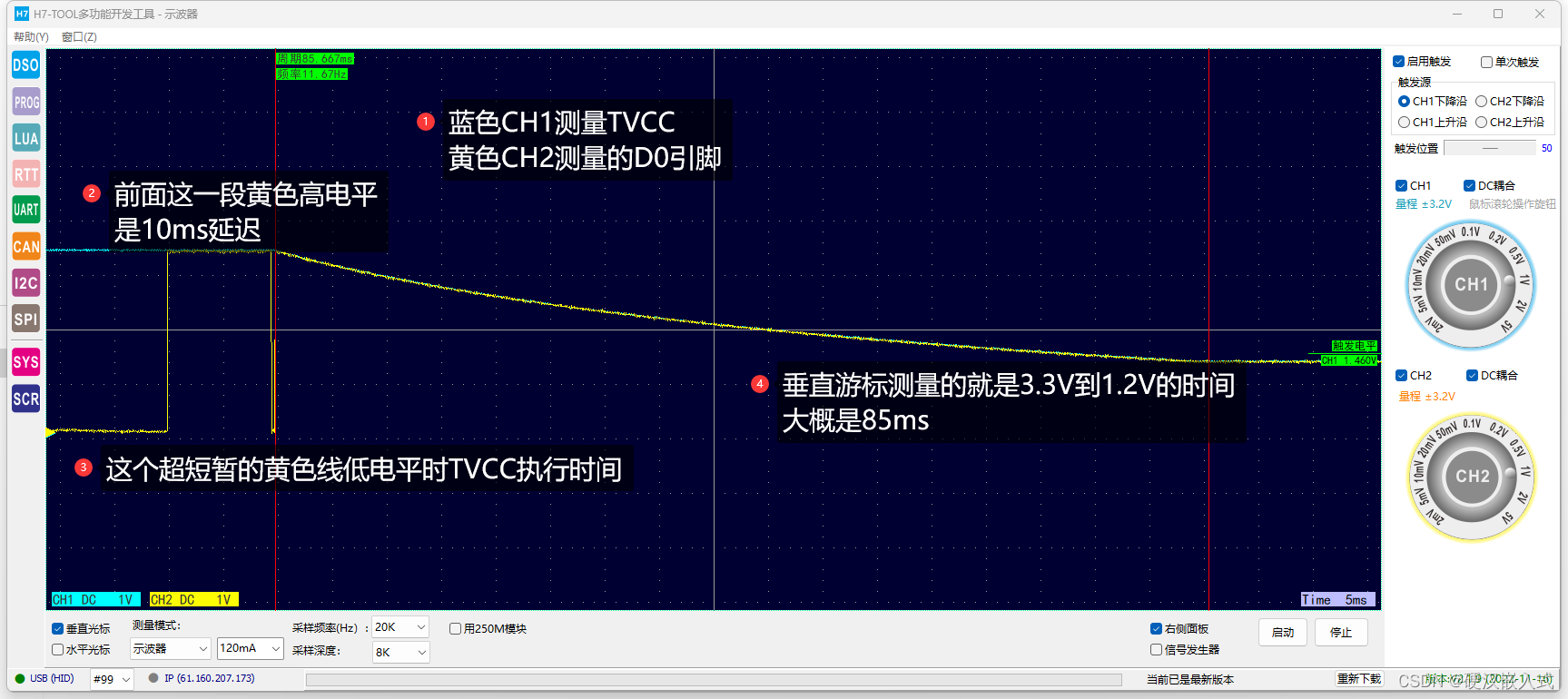
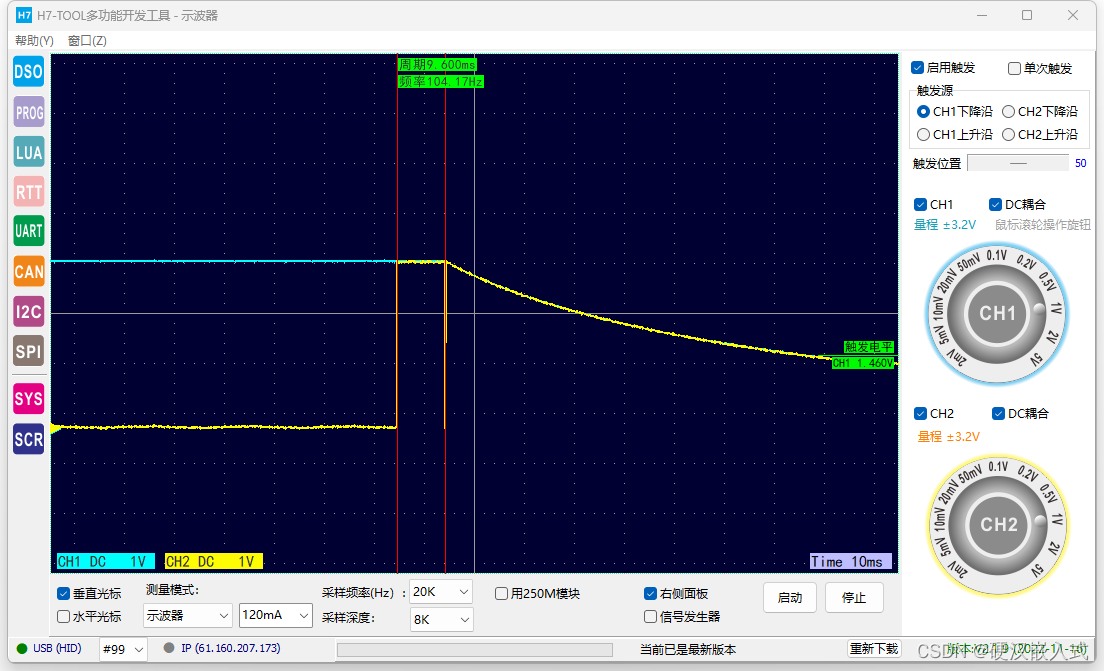
2、测试条件:
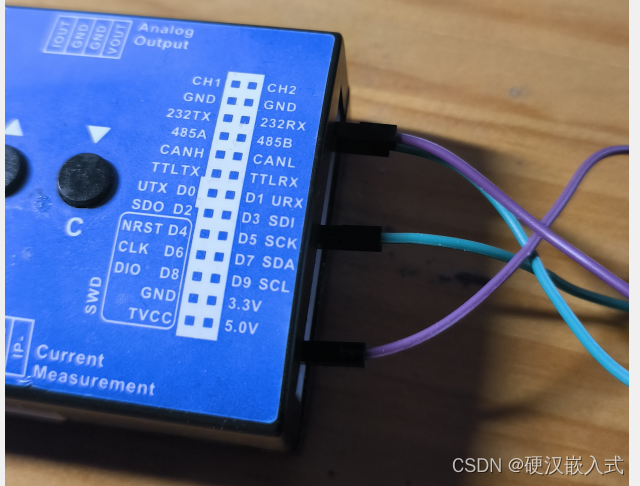
示波器CH1测量的TVCC输出,CH2测试的D0输出,TVCC引脚输出电压值和D0控制引脚的电平是一样的,这个可以看H7-TOOL的原理图双向IO控制。主要是方便控制SPI, SWD,I2C,UART等电平范围。
3、动态执行效果, GIF图片:
插入TOOL USB线,开启示波器捕获,执行LUA小程序
4、硬件接线: