前言:
本章节代码均在Gitee中开源:
导航工程: 导航工程及其有关的所有项目 - Gitee.com![]() https://gitee.com/Ehundred/navigation-engineering/tree/master/%E5%8D%AB%E6%98%9F%E5%AF%BC%E8%88%AA%E5%8E%9F%E7%90%86/%E5%91%A8%E8%B7%B3%E6%8E%A2%E6%B5%8B其中涉及到载波定位的知识,再另一章有详细讲解,感兴趣可以移步到:
https://gitee.com/Ehundred/navigation-engineering/tree/master/%E5%8D%AB%E6%98%9F%E5%AF%BC%E8%88%AA%E5%8E%9F%E7%90%86/%E5%91%A8%E8%B7%B3%E6%8E%A2%E6%B5%8B其中涉及到载波定位的知识,再另一章有详细讲解,感兴趣可以移步到:
我们如何收到卫星信号?(导航电文,载波与测距码)_导航测距码-CSDN博客![]() https://blog.csdn.net/qq_74260823/article/details/139411651
https://blog.csdn.net/qq_74260823/article/details/139411651因为这章是学校作业,所以稍微正经点.
什么是周跳
载波测量观测值
载波相位测量,因为接收机只可以观测到不足一周的相位,但是卫星发射信号到接收机上,中间一定会有很多整周期波:

所以,实际上的总相位为:

而这里的整周数,因为是无法直接测量出来的,所以我们就称他为——整周模糊度
为了计算出整周模糊度,我们还需要对卫星连续观测。在第一次观测的基础上,我们会不断受到电磁波,不足一周的相位会不断增加。当增加到一周时,就将这一周单独提出来。于是,不足一周的相位部分永远小于一周,而满一周时,便将多出的一周加到整周计数上,于是新的表达式为:

换一种方式解释:
电子钟
我们现在有个电子钟,但是这个电子钟不太智能,只能看到秒数的部分:
但是他的实际时间,肯定不是30秒,因为我们要考虑到看不见的分钟部分。他的实际时间是:
我们一直看这个钟。现在是30秒,慢慢他会变成31,32……,一直到,他变成了61秒

但是,61秒就超过了一分钟,会发生进位。虽然我们看不到分钟,但是当61秒变成1秒的时候,我们还是知道,分钟的部分加了1。此时的时间为:

我们就这样一直看,当秒数从60跳到1时,我们就手动记录多加了一分钟。 就算我们不知道分钟数,但是我们可以知道,刚开始的分钟数xx,加上我们手动记录的分钟,就是当前的分钟数,我们把xx当成了一个未知的常量。
于是,新的表达式可以写成:

这样有什么意义?当我们想计算两个时间的差,分钟模糊度会被消掉,剩下的秒数和手动记录的分钟都是已知的,可以直接计算出来。
周跳
还是电子钟。我们一直观测这个电子钟,但是突然,发生了意外,电子钟卡住了!

这个时候,我们看到的秒数是不变的,一直为21秒,而因为一直没有秒数的变化,我们也不敢擅自给手动记录的分钟数进行操作。于是,手动记录的分钟一直停在了5分钟。
突然,电子钟又恢复了正常。我们又看到了秒数,但是这个秒数,因为中间卡了一段时间,所以突然跳到了另一个值;而手动记录的分钟数,因为我们并不知道卡住的时候,过了多少分钟,所以这个5分钟就不可信了。

所以之前的数据就没用了吗?当然不是。虽然手动记录的分钟数差了一个值,但是我们把这个差值,归到本就不知道的分钟模糊度中,这样会产生两个结果:
- 从5分钟开始继续计数,往前的数据可以使用,往后的数据也可以使用
- 虽然分钟模糊度变成了一个新值,但是新值和旧值中间只差了一个常数,这个常数我们可以粗略估计出来,虽然是新值,但是可以和旧值联系起来。

这样做有什么意义?如果我们想计算卡住之前的时间和卡住之后的时间的差,如果废弃之前的数据,那么两段时间就完全联系不到一起。但是如果用新的表达式,分钟模糊度还是可以被消掉,手动记录的分钟数也是可以被使用的,两个时间还是可以按之前的方法正常计算,只不过多了一个卡住的时间这一常量。
所以,这个卡住的时间,就叫做周跳;而周跳产生的原因,就是电子钟卡了。
周跳的产生
周跳产生的原因有很多,但是根本原因,都来源于观测的中断。卫星和接收机中间隔了一栋楼,信号接收异常,观测就中断了一段时间;因为周围在考试有电磁干扰,卫星信号很弱,观测也中断了一段时间。
中断的时候,不满一周部分无法正确计数,而整周计数部分因为看到不满一周部分没有变化,所以整周计数也不敢擅自变化,于是观测值就一直停在了一个值了。而等信号恢复正常,接收机接收到了正常的信号,此时不满一周部分会突然变化为另一个值,而整周计数因为一直没变,所以还是从原来的值开始继续计数。但是和电子钟一样,在观测失锁的时候,并不知道过去了多少周,于是就把这个常数放在整周模糊度中,而整周计数按照原来的值继续计数,还是一个可以使用的值。
 这个失锁导致未知的常数,就叫做周跳。周跳产生的原因,就是信号中断了。
这个失锁导致未知的常数,就叫做周跳。周跳产生的原因,就是信号中断了。
为什么要探测周跳?
废话,因为计算结果需要周跳。
计算机是很笨的。你们可能觉得,只需要看相位的变化,还有总相位的值,不就可以了吗?但是:
- 首先,计算机的观测并不是我们想象中的完全连续。计算机的观测是一种均匀中断的连续,啥意思?就是比如每隔1秒观测一次,一直连续观测下去,最终观测到的是一个又一个的点,而非一段连续的三角函数
- 就算相位发生了极大的变化,计算机也不知道。因为接收机只负责接收,而数据的分析要交给另外的机器去做,也就是我们现在应该去处理的,周跳的探测
- 相位等值发生较大变化,并不百分百因为产生了周跳,还可能因为观测产生误差,或者的的确确真实数据是如此。所以,探测周跳,还应考虑排除误差
周跳探测的方法
周跳探测,一般会采用以下几种方法:
- 屏幕扫描法,就是看一眼过去,看看相位有没有太大的变化
- 高次差法,多项式拟合法
- MW组合观测值法
- 电离层残差法
- 三差法
这里,我们介绍中间三种用的最多的方法:
高次差法
说简单点,就是差分数组。
(补充:一命通关差分-CSDN博客 )
如果在某一个时间点,发生了周跳,往后的所有整周模糊度一定会加上一个周跳常数ΔN,所以我们可以写出整周模糊度的函数表达:

此时,我们把整周模糊度写成一个数组:N[n],然后进行差分:

但是这可能是误差导致的,再把dif1差分:

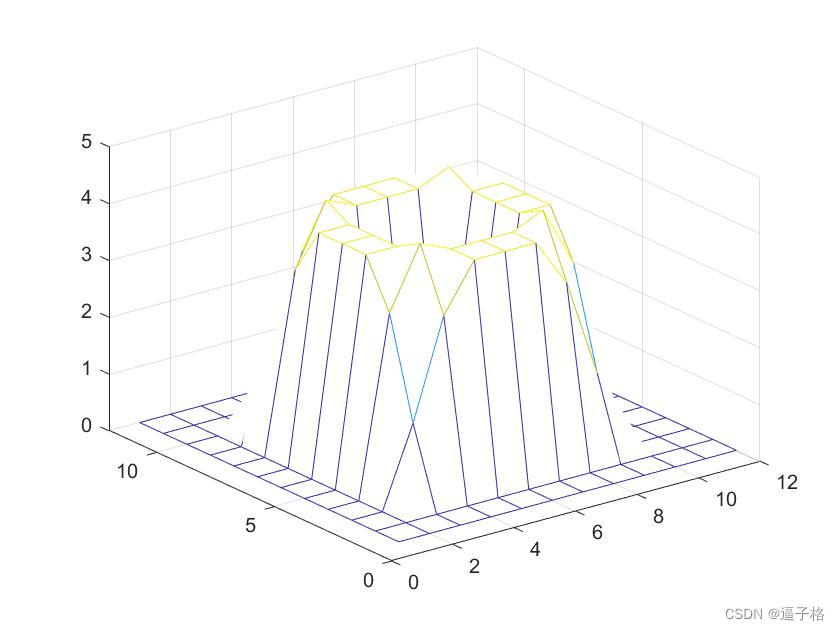
就这样一直差分下去,周跳附近的点的差分值会越来越规律,一直到呈现出一个很规律的图形:

我们不断差分,其实就是为了排除误差,而最终出现这样的图形,就可以断定,发生了周跳。
线性组合观测值法
电离层残差(GF)和MW组合观测值法,实际上都是采用线性组合观测值的方法来探测周跳,所以就放一起讲了。
线性组合观测
首先,什么是线性组合观测?我们知道,一段卫星信号,有两个频率的载波,波段分别为L1和L2。
换句话说,对同一个卫星,一个接收站会受到这个卫星发来的两个不同频率的载波,而这个不同频率的载波,产生的观测值也是不同的。
假设L1载波的观测值为φ1,L2载波的观测值为φ2,φ为不足一周的相位。
那么组合观测值,φ=n*φ1+m*φ2,当n和m取不同的值时,产生的不同结果,就叫不同的线性组合观测,常见的有:
- 无电离层,消去电离层延迟
- 宽巷,n=1,m=-1
- 窄巷,n=1,m=1
- 电离层残差,n=λ1,m=-λ2
所以对一个线性组合观测值,我们直接采用一个基类:
//单个载波
struct carrier
{
double f;//频率,从L1和L2波段中选择
double Lambda;//波长,f*l=c
double Fai;//不足一周计数
double N;//整周模糊度
double count;//整周计数
double distance;//伪距
double TEC;//电子含量
};
//双载波观测值
class Dual_frequency_carrier
{
public:
Dual_frequency_carrier(carrier c1,carrier c2)
:_carrier1(c1),
_carrier2(c2)
{}
carrier _carrier1;
carrier _carrier2;
};
//线性组合观测值(基类)
class LineObservation
{
public:
LineObservation(const Dual_frequency_carrier& carriers)
:_carriers(carriers)
{}
double Observation()
{
return _observation;
}
protected:
Dual_frequency_carrier _carriers;
double _observation;//线性组合观测值
virtual double _Observation() = 0;//线性组合的方法
};而对所有的线性组合,只需要去继承这个基类,然后重写一下线性组合的方法,就可以了。
电离层残差组合


//GF观测值
class GeometryFree : public LineObservation
{
public:
GeometryFree(const Dual_frequency_carrier& carriers)
:LineObservation(carriers)
{
_Observation();
}
protected:
//重写虚函数,即线性组合的方法
virtual double _Observation()
{
carrier car1 = _carriers._carrier1;
carrier car2 = _carriers._carrier2;
double A1 = -40.3 * car1.TEC;
double Vion1 = A1 / pow(car1.f, 2);
_observation = car1.Lambda * car1.N - car2.Lambda * car2.N + (1 - pow(car1.f, 2) / pow(car2.f, 2)) * Vion1;//直接用推导出的公式
return _observation;//线性组合观测值LGF
}
};
此时,我们再来看表达式:
两个载波的波长是已知且为常量的。
电离层延迟在电离层电子含量TEC变化不大的时候,也是不变的,而在短时间内TEC不会发生太大的变化,所有我们也可以认为他是一个常量。
最后只剩下整周模糊度,因为整周模糊度如果不发生周跳,那么整周模糊度也是一个常量,
所以,只要不发生周跳,那么LGF观测值一定不会发生太大的变化
换句话说,如果LGF发生了太大的变化,那么一定发生了周跳
我们把这个变化的最大上限,定为0.05cm,还是采用差分的方法,如果超过了最大值,就表示发生了周跳:
//GF周跳探测
class GF_detect
{
public:
GF_detect(const vector<Dual_frequency_carrier>& data)
{
//把所有的载波变为GF观测值
for (const auto& e : data)
{
_data.push_back(GeometryFree(e));
}
_Detect();
}
bool Detect()
{
return _detect;
}
vector<int> Slip()
{
return _slip;
}
private:
vector<GeometryFree> _data;
bool _detect;//是否发生周跳,发生周跳为true
vector<int> _slip;//发生周跳的具体时间点
double MAX_GAP = 5E-4;//最大阈值
bool _Detect()
{
//遍历每一个历元差,如果差值超过了阈值,那么一定发生了周跳
for (int i = 1; i < _data.size(); i++)
{
if (_data[i].Observation() - _data[i - 1].Observation() > MAX_GAP)
{
_detect = true;//发生了周跳
_slip.push_back(i);//发生周跳的时间点
}
}
return _detect;
}
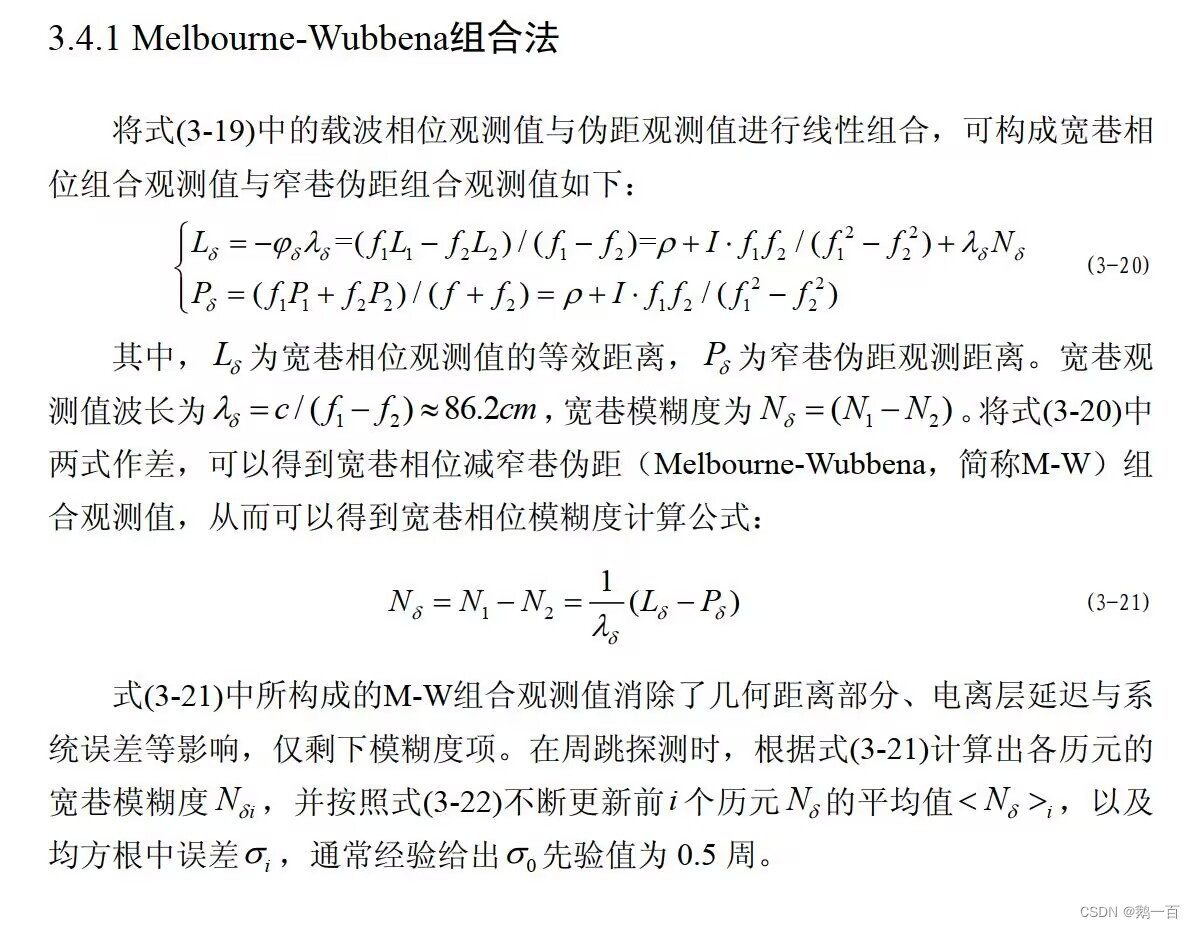
};MW组合观测
为啥叫MW组合?因为是一个姓M和一个姓W的人提出来的。但是推导方法非常非常简单,如果把我放在那个年代,说不定能叫YB观测值。
因为符号太多,所以只能采取手写的方法推导了,见谅


最后得出的结果为:
 在这里,我们以周为单位,来进行代码的示例
在这里,我们以周为单位,来进行代码的示例
class MW :public LineObservation
{
public:
MW(const Dual_frequency_carrier& carriers)
:LineObservation(carriers)
{
_Observation();
}
private:
virtual double _Obersvation()
{
carrier car1 = _carriers._carrier1;
carrier car2 = _carriers._carrier2;
double f1 = car1.f;
double f2 = car2.f;
double L1 = car1.Lambda;
double L2 = car2.Lambda;
double P1 = car1.distance;
double P2 = car2.distance;
_observation = (f1 - f2) / (f1 + f2) * (P1 / L1 + P2 / L2) - (car1.Fai - car2.Fai);//周数
return _observation;
}
};而还是和电离层残差组合一样,

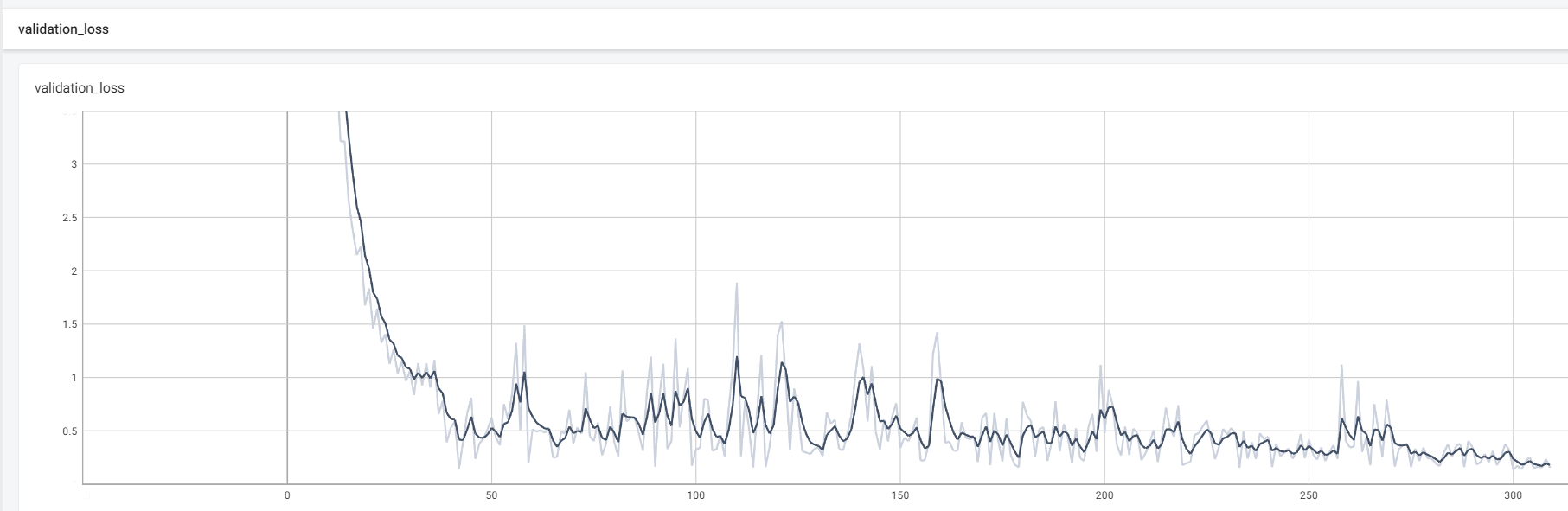
等式左边都是变化不大的值,而等式右边是整周模糊度的差值。按理说,左边计算出来的值,应该是一个变化不会太大的常量,如果变化很大,那么就表示发生了周跳。
 前面的不用管,我们只需要看后面的检测方法——用取平均值和计算方差的方法,来检测到底是周跳还是误差:
前面的不用管,我们只需要看后面的检测方法——用取平均值和计算方差的方法,来检测到底是周跳还是误差:
class MW_detect
{
MW_detect(const vector<Dual_frequency_carrier>& data)
{
//将载波数据计算为MW组合
for (const auto& e : data)
{
_data.push_back(MW(e));
}
_Detect();
}
bool Detect()
{
return _detect;
}
vector<int> Slip()
{
return _slip;
}
private:
vector<MW> _data;
bool _detect;//是否发生周跳,发生周跳为true
vector<int> _slip;//周跳具体时间点
double MAX_GAP = 0.5;//最大阈值:0.5周
bool _Detect()
{
double sum = _data[0].Observation();
double average = _data[0].Observation();
double sigma = 0.5;
bool record = false;
for (int i = 1; i < _data.size(); i++)
{
//如果可能发生周跳
if (record)
{
//判断是周跳还是误差
if (abs(_data[i].Observation() - _data[i - 1].Observation()) <= 1)
{
_detect = true;
_slip.push_back(i);
}
}
if (abs(_data[i].Observation() - average) >= sigma * 4)
record = true;//可能发生周跳,也可能是误差
sum += _data[i].Observation();
average = sum / (i + 1);
sigma = sigma * sigma + (pow(_data[i].Observation() - average, 2) - sigma * sigma) / (i + 1);
}
return _detect;
}
};最后,给自己叠个甲。因为自己才是导航工程大二的本科生,有些概念理解可能不到位,而又想用最容易理解的方式表达出来,所以可能正确性会稍微有些偏差。但是对初学者来说,应该不会存在太大的错误,如果可以帮到你,真的荣幸之极。还有