这里写自定义目录标题
- 一、块设备的简介
- 二、块设备驱动框架
- 1、block_device 结构体
- 2、gendisk 结构体
- 3、block_device_operations 结构体
- 4、块设备 I/O 请求过程
- 5、bio 结构体
- 三、使用请求队列方式的块设备驱动程序
- 1、经过第“二”部分的讲解总结,可以得出驱动程序的核心部分的编写流程,如下:
- 2、驱动程序文件
- 3、驱动程序运行测试
一、块设备的简介
Linux 三大驱动类型:字符设备驱动、块设备驱动、网络设备驱动。
块设备是针对存储设备的,比如 SD 卡、 EMMC、 NAND Flash、 Nor Flash、 SPI Flash、机械硬盘、固态硬盘等。因此块设备驱动其实就是这些存储设备驱动,块设备驱动相比字符设备驱动的主要区别如下:
①、块设备只能以块为单位进行读写访问,块是 linux 虚拟文件系统(VFS)基本的数据传输单位。字符设备是以字节为单位进行数据传输的,不需要缓冲。
②、块设备在结构上是可以进行随机访问的,对于这些设备的读写都是按块进行的,块设备使用缓冲区来暂时存放数据,等到条件成熟以后再一次性将缓冲区中的数据写入块设备中。这么做的目的为了提高块设备寿命,大家如果仔细观察的话就会发现有些硬盘或者 NAND Flash
就会标明擦除次数(flash 的特性,写之前要先擦除),比如擦除 100000 次等。因此,为了提高块设备寿命引入了缓冲区,数据先写入到缓冲区中,等满足一定条件后再一次性写入到真正的物理存储设备中,这样就减少了对块设备的擦除次数,提高了块设备寿命。
字符设备是顺序的数据流设备,字符设备是按照字节进行读写访问的。字符设备不需要缓冲区,对于字符设备的访问都是实时的,而且也不需要按照固定的块大小进行访问。
块设备结构的不同其 I/O 算法也会不同,比如对于 EMMC、 SD 卡、 NAND Flash 这类没有任何机械设备的存储设备就可以任意读写任何的扇区(块设备物理存储单元)。但是对于机械硬盘这样带有磁头的设备,读取不同的盘面或者磁道里面的数据,磁头都需要进行移动,因此对于机械硬盘而言,将那些杂乱的访问按照一定的顺序进行排列可以有效提高磁盘性能, linux 里面针对不同的存储设备实现了不同的 I/O 调度算法。
二、块设备驱动框架
1、block_device 结构体
linux 内 核 使 用 block_device 表 示 块 设 备 , block_device 为 一 个 结 构 体 , 定 义 在include/linux/fs.h 文件中,结构体内容如下:
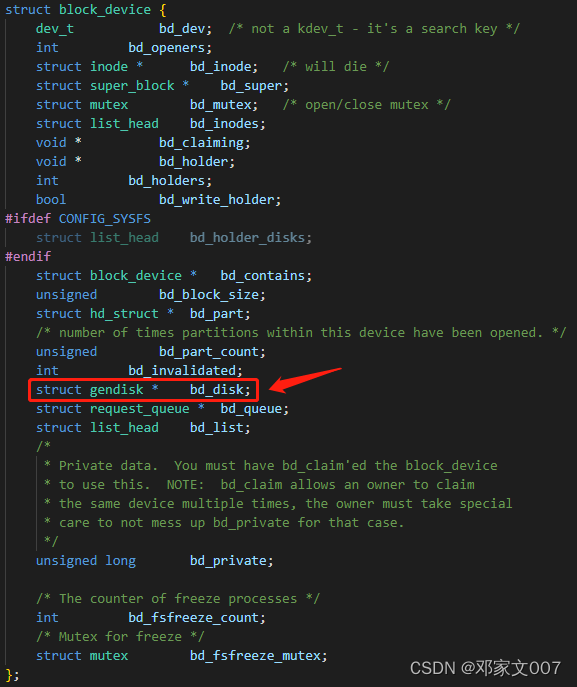
这里重点关注一下gendisk结构体指针类型的bd_disk成员变量。内核使用 block_device 来表示一个具体的块设备对象,而gendisk是表示通用磁盘结构的。
2、gendisk 结构体
linux 内核使用 gendisk 来描述一个磁盘设备,这是一个结构体,定义在 include/linux/genhd.h中,内容如下:
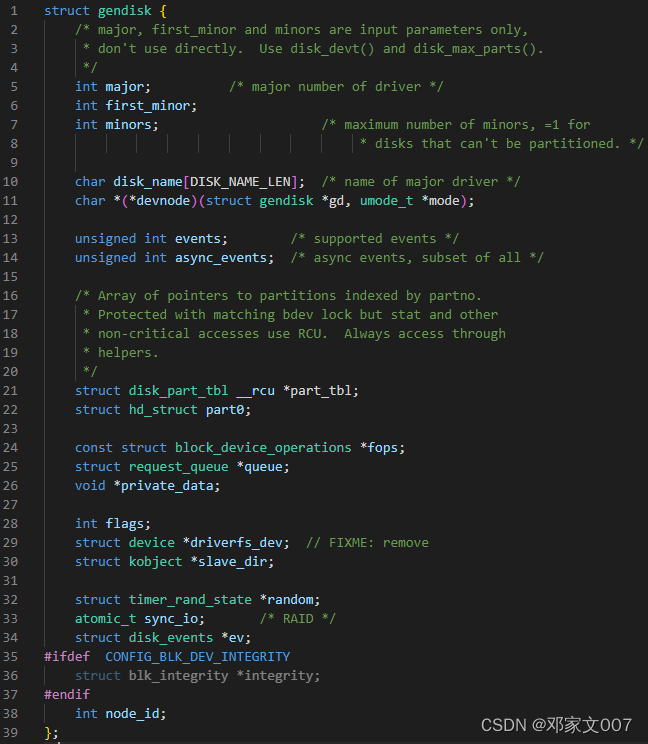
简单看一下 gendisk 结构体中比较重要的几个成员变量:
第 5 行, major 为磁盘设备的主设备号。
第 6 行, first_minor 为磁盘的第一个次设备号。
第 7 行, minors 为磁盘的次设备号数量,也就是磁盘的分区数量,这些分区的主设备号一样, 次设备号不同。
第 21 行, part_tbl 为磁盘对应的分区表,为结构体 disk_part_tbl 类型, disk_part_tbl 的核心是一个 hd_struct 结构体指针数组,此数组每一项都对应一个分区信息。
第 24 行, fops 为块设备操作集,为 block_device_operations 结构体类型。和字符设备操作集 file_operations 一样,是块设备驱动中的重点!
第 25 行, queue 为磁盘对应的请求队列,所以针对该磁盘设备的请求都放到此队列中,驱动程序需要处理此队列中的所有请求。
3、block_device_operations 结构体
在gendisk 结构体中的 block_device_operations 结构体和字符设备的 file _operations 一样,块设备也有操作集,为结构体 block_device_operations,此结构体定义在 include/linux/blkdev.h 中,结构体内容如下:
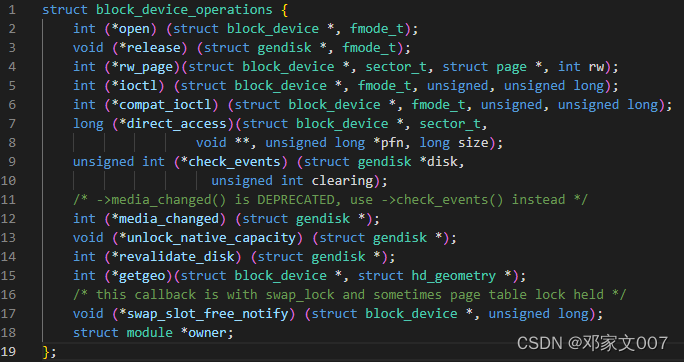
可以看出, block_device_operations 结构体里面的操作集函数和字符设备的 file_operations操作集基本类似,但是块设备的操作集函数比较少,我们来看一下其中比较重要的几个成员函数:
第 2 行, open 函数用于打开指定的块设备。
第 3 行, release 函数用于关闭(释放)指定的块设备。
第 4 行, rw_page 函数用于读写指定的页。
第 5 行, ioctl 函数用于块设备的 I/O 控制。
第 6 行, compat_ioctl 函数和 ioctl 函数一样,都是用于块设备的 I/O 控制。区别在于在 64位系统上, 32 位应用程序的 ioctl 会调用 compat_iotl 函数。在 32 位系统上运行的 32 位应用程序调用的就是 ioctl 函数。
第 15 行, getgeo 函数用于获取磁盘信息,包括磁头、柱面和扇区等信息。
第 18 行, owner 表示此结构体属于哪个模块,一般直接设置为 THIS_MODULE。
4、块设备 I/O 请求过程
大家如果仔细观察的话会在 block_device_operations 结构体中并没有找到 read 和 write 这样的读写函数,那么块设备是怎么从物理块设备中读写数据?这里就引出了块设备驱动中非常重要的 request_queue、 request 和 bio。
①请求队列 request_queue:
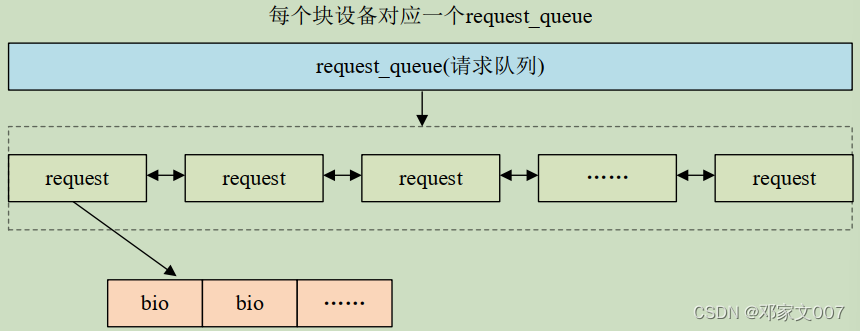
内核将对块设备的读写都发送到请求队列 request_queue 中, request_queue 中包含了一系列的request(请求结构体),而 request 又包含了 bio, bio 保存了读写相关数据,比如从块设备的哪个地址开始读取、读取的数据长度,读取到哪里,如果是写的话还包括要写入的数据等。我们先来看一下 request_queue,这是一个结构体,定义在文件 include/linux/blkdev.h 中,由于request_queue 结构体比较长,这里就不列出来了。大家回过头看一下 gendisk结构体就会发现里面有一个 request_queue 结构体指针类型成员变量 queue,也就说在编写块设
备驱动的时候,每个磁盘(gendisk)都要分配一个 request_queue。
②请求 request:
请求队列(request_queue)里面包含的就是一系列的请求(request), request 是一个结构体,定义在 include/linux/blkdev.h 里面,这里就不展开 request 结构体了,太长了。 request 里面有一个
名为“bio”的成员变量,类型为 bio 结构体指针。而真正的数据就保存在 bio 里面,所以我们需要从 request_queue 中取出一个一个的 request,然后再从每个 request 里面取出 bio,最后根据 bio 的描述讲数据写入到块设备,或者从块设备中读取数据。(一步到位处理请求:我们也可以使用 blk_fetch_request 函数来一次性完成请求的获取和开启, blk_fetch_request函数很简单)
5、bio 结构体
每个 request 里面会有多个 bio, bio 保存着最终要读写的数据、地址等信息。上层应用程序对于块设备的读写会被构造成一个或多个 bio 结构, bio 结构描述了要读写的起始扇区、要读写的扇区数量、是读取还是写入、页偏移、数据长度等等信息。上层会将 bio 提交给 I/O 调度器,I/O 调度器会将这些 bio 构造成 request 结构,而一个物理存储设备对应一个 request_queue,request_queue 里面顺序存放着一系列的 request。新产生的 bio 可能被合并到 request_queue 里现有的 request 中,也可能产生新的 request,然后插入到 request_queue 中合适的位置,这一切都是由 I/O 调度器来完成的。 request_queue、 request 和 bio 之间的关系如下图所示:
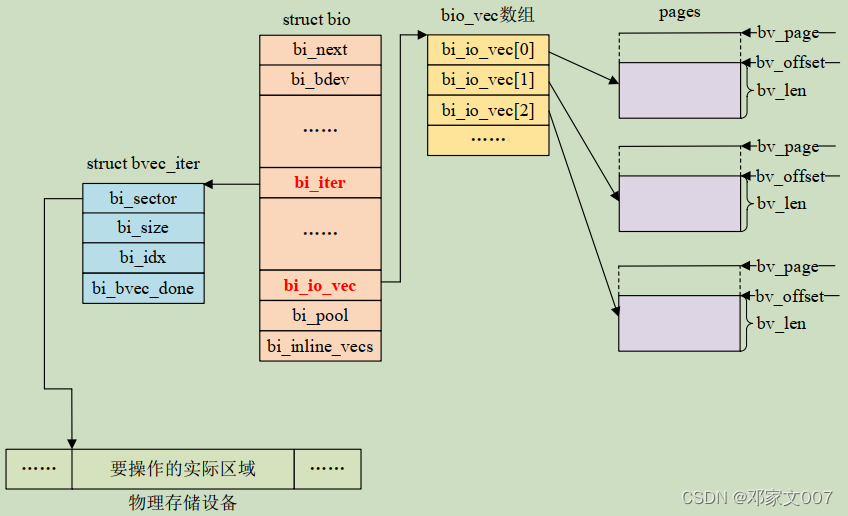
bio、bvec_iter 以及 bio_vec 这三个结构体之间的关系如下图:(bvec_iter 结构体描述了要操作的设备扇区等信息; bio_vec 就是“page,offset,len”组合, page 指定了所在的物理页, offset 表示所处 页的偏移地址, len 就是数据长度。)
三、使用请求队列方式的块设备驱动程序
(使用开发板上的 RAM 模拟一段块设备,也就是,然后编写块设备驱动。)
1、经过第“二”部分的讲解总结,可以得出驱动程序的核心部分的编写流程,如下:
①、和字符设备驱动一样,我们需要向内核注册新的块设备、申请设备号,块设备注册函数为register_blkdev,函数原型如下:
int register_blkdev(unsigned int major, const char *name)
但major形参设置为0,那么表示由系统自动分配主设备号,当返回负值表示注册失败。(注销块设备:void unregister_blkdev(unsigned int major, const char *name))
②、使用 gendisk 之前要先申请, allo_disk 函数用于申请一个 gendisk,函数原型如下:
struct gendisk *alloc_disk(int minors)
(删除gendisk:void del_gendisk(struct gendisk *gp))
③初始化gendisk结构体的内部属性:
Ⅰ、将内核对块设备的读写的操作的地方 “请求队列“ 进行初始化,使用 blk_init_queue 函数来完成request_queue 的申请与初始化,函数原型如下:
request_queue *blk_init_queue(request_fn_proc *rfn, spinlock_t *lock)
rfn: 请求处理函数指针,每个 request_queue 都要有一个请求处理函数,请求处理函数request_fn_proc 原型: void (request_fn_proc) (struct request_queue *q), 请求处理函数需要驱动编写人员自行实现。
Ⅱ、blk_fetch_request 函数来一次性完成请求的获取和开启,其函数原型如下:
struct request *blk_fetch_request(struct request_queue *q)
Ⅲ、获取到request后,那么就要使用request去获取bio中的数据缓冲区的数据,使用bio_data函数,其函数原型如下:
static inline void *bio_data(struct bio *bio)
用这个函数我们就知道我们当前操作的内存数据位置了
④、使用 alloc_disk 申请到 gendisk 以后系统还不能使用,必须使用 add_disk 函数将申请到的gendisk 添加到内核中, add_disk 函数原型如下:
void add_disk(struct gendisk *disk)
2、驱动程序文件
/*
* 根据linux内核的程序查找所使用函数的对应头文件。
*/
#include <linux/module.h> //MODULE_LICENSE,MODULE_AUTHOR
#include <linux/init.h> //module_init,module_exit
#include <linux/kernel.h> //printk
#include <linux/fs.h> //struct file_operations
#include <linux/slab.h> //kmalloc, kfree
#include <linux/uaccess.h> //copy_to_user,copy_from_user
#include <linux/io.h> //ioremap,iounmap
#include <linux/cdev.h> //struct cdev,cdev_init,cdev_add,cdev_del
#include <linux/device.h> //class
#include <linux/of.h> //of_find_node_by_path
#include <linux/of_gpio.h> //of_get_named_gpio
#include <linux/gpio.h> //gpio_request,gpio_direction_output,gpio_set_number
#include <linux/atomic.h> //atomic_t
#include <linux/of_irq.h> //irq_of_parse_and_map
#include <linux/interrupt.h> //request_irq
#include <linux/timer.h> //timer_list
#include <linux/jiffies.h> //jiffies
#include <linux/atomic.h> //atomic_set
#include <linux/input.h> //input
#include <linux/platform_device.h> //platform
#include <linux/delay.h> //mdelay
#include <linux/i2c.h> //i2c
#include <linux/input/mt.h> //input multi touch
#include <linux/blkdev.h> //register_blkdev,alloc_disk,blk_init_queue,set_capacity,add_disk
#include <linux/hdreg.h> //hd_geometry
/* 2.1 定义磁盘大小,内存模拟 */
#define RAMDISK_SIZE (2 * 1024 * 1024) /* 大小2MB */
#define RAMDISK_NAME "ramdisk" /* 名字 */
#define RAMDISK_MINOR 3 /* 次设备号数量,也就是gendisk对应的分区数量,表示3个分区 */
/* 2.2 ramdisk设备结构体 */
struct ramdisk_dev{
int major; /* 主设备号 */
unsigned char *ramdiskbuf; /*ramdisk的内存空间,模块块设备的磁盘空间 */
struct gendisk *gendisk; /* linux 内核使用 gendisk 来描述一个磁盘设备 */
struct request_queue *queue; /* 请求队列 */
spinlock_t spinlock; /* 自旋锁 */
};
struct ramdisk_dev ramdisk; /* 实例化ramdisk_dev结构体 */
/* 5.2 具体的数据处理过程 */
static void ramdisk_transfer(struct request *req)
{
/* 数据传输三要素:源, 目的, 长度
* 内存地址, 块设备地址, 长度 */
unsigned long start = blk_rq_pos(req) << 9; //获取到的块设备扇区地址,左移9位转换为字节地址,这里的9位指的是一个扇区512字节
unsigned long len = blk_rq_cur_bytes(req); //长度
/* bio 中的数据缓冲区
* 读:从磁盘读取到的数据存放到 buffer 中
* 写: buffer 保存这要写入磁盘的数据
*/
void *buffer = bio_data(req->bio);
if (rq_data_dir(req) == READ) //读操作
memcpy(buffer, ramdisk.ramdiskbuf + start, len);
else //写操作
memcpy(ramdisk.ramdiskbuf + start, buffer, len);
}
/* 3.3.1 请求处理函数 */
static void ramdisk_request(struct request_queue *q)
{
/******************* 5.1 请求处理函数的实现 *******************/
struct request *req;
int err = 0;
/* 循环处理请求队列中的每个请求 */
req = blk_fetch_request(q); //该函数具有电梯调度算法,可以适配机械硬盘那些
while (req) {
/* 处理request,也就是具体的读写操作 */
ramdisk_transfer(req);
/* 判断是否为最后一个请求,如果不是的话就获取下一个请求
* 循环处理完请求队列中的所有请求。
*/
if (!__blk_end_request_cur(req, err))
req = blk_fetch_request(q);
}
/*************************************************************/
}
/* 3.4.1.1 打开块设备 */
static int ramdisk_open(struct block_device *bdev, fmode_t mode)
{
printk("ramdisk open\r\n");
return 0;
}
/* 3.4.1.2 释放块设备 */
static void ramdisk_release(struct gendisk *disk, fmode_t mode)
{
printk("ramdisk release\r\n");
}
/* 3.4.1.3 获取机械磁盘信息,参数1:块设备,参数2:模式 */
static int ramdisk_getgeo(struct block_device *dev, struct hd_geometry *geo)
{
printk("ramdisk getgeo\r\n");
/* 磁盘信息 */
geo->heads = 2; //磁头
geo->cylinders = 32; //柱面
geo->sectors = RAMDISK_SIZE / (2 * 32 *512); //一个磁道上的扇区数量
return 0;
}
/* 3.4.1 块设备操作集 */
static const struct block_device_operations ramdisk_fops =
{
.owner = THIS_MODULE,
.open = ramdisk_open,
.release = ramdisk_release,
.getgeo = ramdisk_getgeo,
};
/* 1.2 设备驱动模块加载函数 */
static int __init ramdisk_init(void)
{
int ret = 0;
printk("ramdisk_init\r\n");
/* 2.3 申请ramdisk内存 */
ramdisk.ramdiskbuf = kzalloc(RAMDISK_SIZE,GFP_KERNEL);
if(ramdisk.ramdiskbuf == NULL) {
ret = -EINVAL;
goto ramalloc_fail;
}
/* 3.1 注册块设备 */
ramdisk.major = register_blkdev(0, RAMDISK_NAME); //参数1:写0表示由系统自动分配未使用打主号码(1-255)
if(ramdisk.major < 0) {
ret = -EINVAL;
goto ramdisk_register_blkdev_fail;
}
printk("ramdisk major = %d\r\n",ramdisk.major);
/* 3.2 申请gendisk */
ramdisk.gendisk = alloc_disk(RAMDISK_MINOR);
if (!ramdisk.gendisk) {
ret = -EINVAL;
goto gendisk_alloc_fail;;
}
/* 3.3 申请并初始化请求队列 */
spin_lock_init(&ramdisk.spinlock); //初始化自旋锁
ramdisk.queue = blk_init_queue(ramdisk_request,&ramdisk.spinlock); //参数1:请求处理函数 参数2:自旋锁
if (!ramdisk.queue) {
ret = -EINVAL;
goto blk_queue_fail;
}
/* 3.4 初始化gendisk */
ramdisk.gendisk->major = ramdisk.major; //主设备号
ramdisk.gendisk->first_minor = 0; //第一个次设备号
ramdisk.gendisk->fops = &ramdisk_fops; //操作集
ramdisk.gendisk->private_data = &ramdisk; //私有数据
ramdisk.gendisk->queue = ramdisk.queue; //请求队列
sprintf(ramdisk.gendisk->disk_name,RAMDISK_NAME); //名称
set_capacity(ramdisk.gendisk,RAMDISK_SIZE/512); //设置gendisk容量,单位扇区512字节
add_disk(ramdisk.gendisk); //添加到内核中
return 0;
blk_queue_fail:
put_disk(ramdisk.gendisk);
gendisk_alloc_fail:
unregister_blkdev(ramdisk.major,RAMDISK_NAME); //注销块设备
ramdisk_register_blkdev_fail:
kfree(ramdisk.ramdiskbuf); //释放内存
ramalloc_fail:
return ret;
}
/* 1.3 设备驱动模块卸载函数 */
static void __exit ramdisk_exit(void)
{
/* 4.1 删除内核中的gendisk */
del_gendisk(ramdisk.gendisk);
/* 4.2 释放ramdisk.gendisk */
put_disk(ramdisk.gendisk);
/* 4.3 清除请求队列 */
blk_cleanup_queue(ramdisk.queue);
/* 4.4 注销块设备 */
unregister_blkdev(ramdisk.major,RAMDISK_NAME);
/* 4.5 释放内存 */
kfree(ramdisk.ramdiskbuf);
}
/* 1.4 注册驱动模块加载与驱动模块卸载 */
module_init(ramdisk_init);
module_exit(ramdisk_exit);
/* 1.1 许可证和作者 */
MODULE_LICENSE("GPL");
MODULE_AUTHOR("djw");
3、驱动程序运行测试
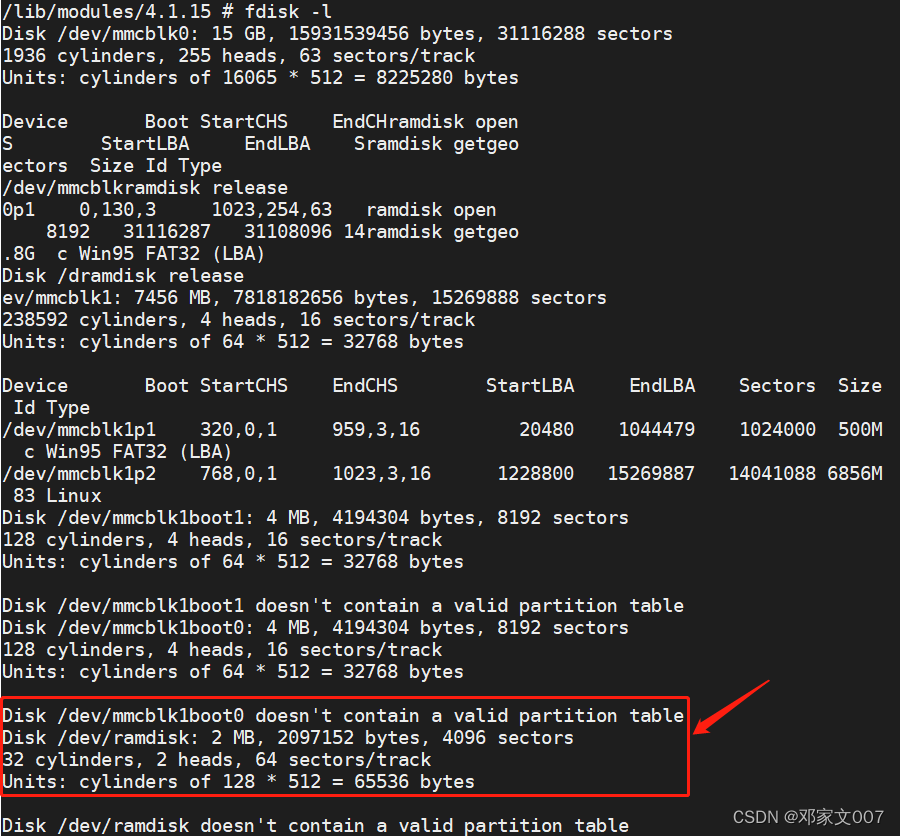
①加载驱动模块

②查看 ramdisk 磁盘(可以看出, ramdisk 已经识别出来了,大小为 2MB,但是同时也提示/dev/ramdisk没有分区表,因为我们还没有格式化/dev/ramdisk)