读AI未来进行式笔记06自动驾驶技术
news2026/2/13 0:50:44
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1800932.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
多线程leetcode编程题
synchronized 实现
class ReentrantTest {private int n;private volatile int flag 1;private Object lock new Object();public ReentrantTest(int n) {this.n n;}public void zero(IntConsumer printNumber) throws InterruptedException{for(int i1;i<n;){synchron…
.net core 使用js,.net core 使用javascript,在.net core项目中怎么使用javascript
.net core 使用js,.net core 使用javascript,在.net core项目中怎么使用javascript 我项目里需要用到“文字编码”,为了保证前端和后端的编码解码不处bug, 所以,我在项目中用了这个 下面推荐之前在.net F4.0时的方法 文章一&#…

08_旷视轻量化网络--ShuffleNet V1
1.1 简介
ShuffleNetV1是旷视科技(Face)在2017年提出的一种专为移动设备设计的高效卷积神经网络(CNN)架构。它的主要目标是在保证模型精度的同时,极大地降低计算成本,使其更适合资源受限的环境,…
wx小程序自定义tabbar
1.在app.json文件中,添加自定义tabbar配置:"custom": true "tabBar": {"custom": true,"backgroundColor": "#fafafa","borderStyle": "white","selectedColor": &quo…
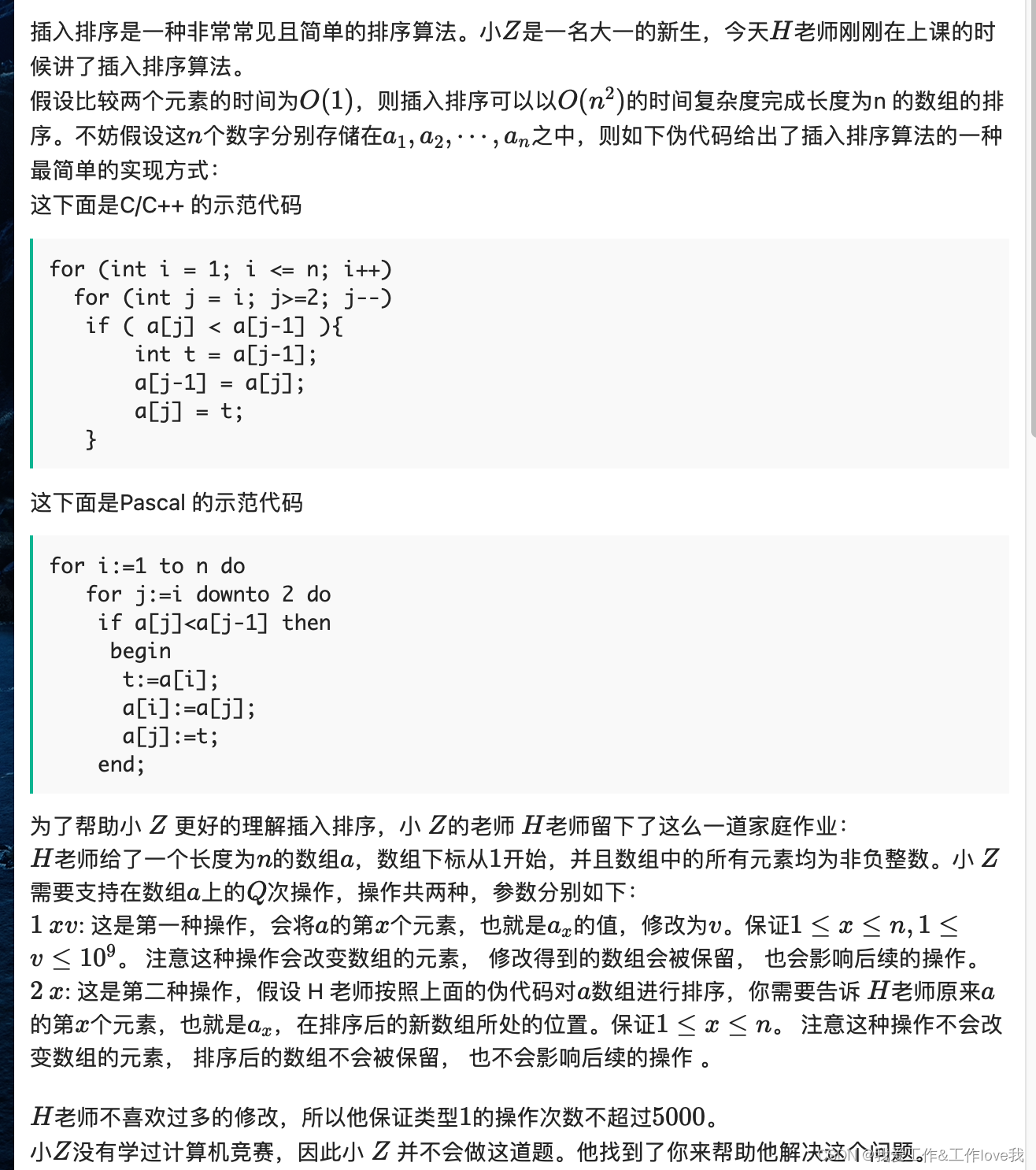
2021JSP普及组第二题:插入排序
2021JSP普及组第二题 题目: 思路: 题目要求排序后根据操作进行对应操作。
操作一需要显示某位置数据排序后的位置,所以需要定义结构体数组储存原数据的位置和数据本身排序后所得数据要根据原位置输出排序后的位置,所以建立一个新…
Linux lvm卷扩容之SSM
介绍
SSM(System Storage Manager)是系统存储管理器,它是一种统一的命令行界面,用于管理各种存储设备。通过SSM,用户可以方便地管理、配置和监控存储系统。检查关于可用硬驱和LVM卷的信息。显示关于现有磁盘存储设备、…


Stable-Diffusion的WebUI部署
1、环境准备及安装
1.1、linux环境
# 首先,已经预先安装好了anaconda,在这里新建一个环境
conda create -n sdwebui python3.10
# 安装完毕后,激活该环境
conda activate sdwebui# 安装
# 下载stable-diffusion-webui代码
git clone https:…
2024年安全现状报告
2024 年安全现状报告有些矛盾。尽管安全专业人员的道路困难重重,比如说严格的合规要求、不断升级的地缘政治紧张局势和更复杂的威胁环境,但整个行业还是在取得进展。 许多组织表示,与前几年相比,网络安全变得更容易管理。组织之间…
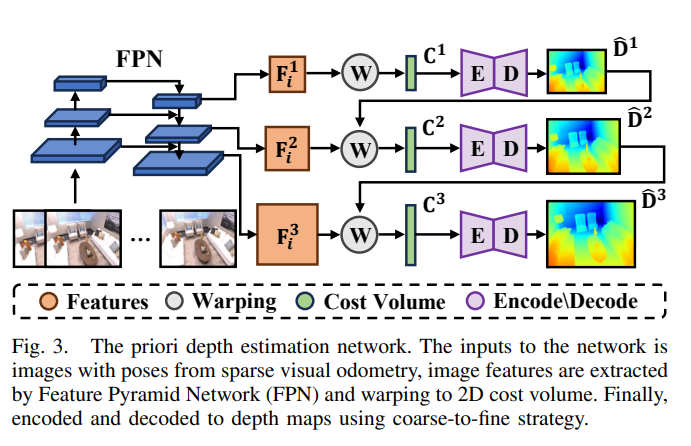
经典文献阅读之--MGS-SLAM(单目稀疏跟踪和高斯映射与深度平滑正则化)
Tip: 如果你在进行深度学习、自动驾驶、模型推理、微调或AI绘画出图等任务,并且需要GPU资源,可以考虑使用UCloud云计算旗下的Compshare的GPU算力云平台。他们提供高性价比的4090 GPU,按时收费每卡2.6元,月卡只需要1.7元每小时&…

线性代数|机器学习-P9向量和矩阵范数
文章目录 1. 向量范数2. 对称矩阵S的v范数3. 最小二乘法4. 矩阵范数 1. 向量范数
范数存在的意义是为了实现比较距离,比如,在一维实数集合中,我们随便取两个点4和9,我们知道9比4大,但是到了二维实数空间中,…
认识Spring 中的BeanPostProcessor
关于BeanPostProcessor和BeanFactoryPostProcessors,将分2篇文章来写,这篇文章是对Spring 中BeanPostProcessor进行了总结 先看下大模型对这个类的介绍,随后再看下这两个类的示例,最后看下这两个类的实现。 这两个类从名字看都很类…

压缩视频在线压缩网站,压缩视频在线压缩工具软件
在数字化时代,视频成为了人们记录和分享生活的重要载体。然而,视频文件一般都非常大,这不仅占据了大量的存储空间,也给视频的传输和分享带来了不便。因此,压缩视频成为了许多人必须掌握的技能。本文将详细介绍如何压缩…
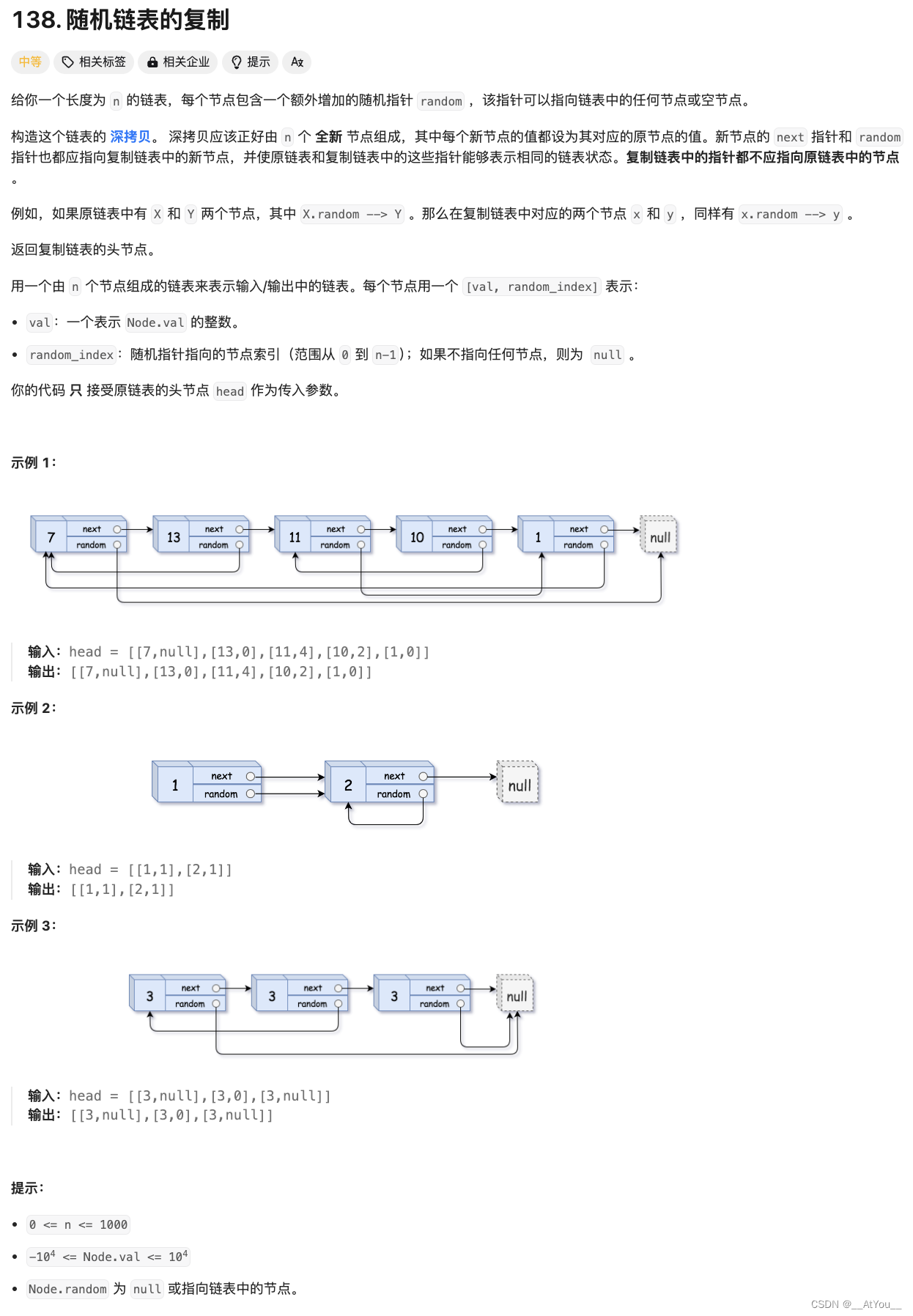
Golang | Leetcode Golang题解之第138题随机链表的复制
题目: 题解:
func copyRandomList(head *Node) *Node {if head nil {return nil}for node : head; node ! nil; node node.Next.Next {node.Next &Node{Val: node.Val, Next: node.Next}}for node : head; node ! nil; node node.Next.Next {if…
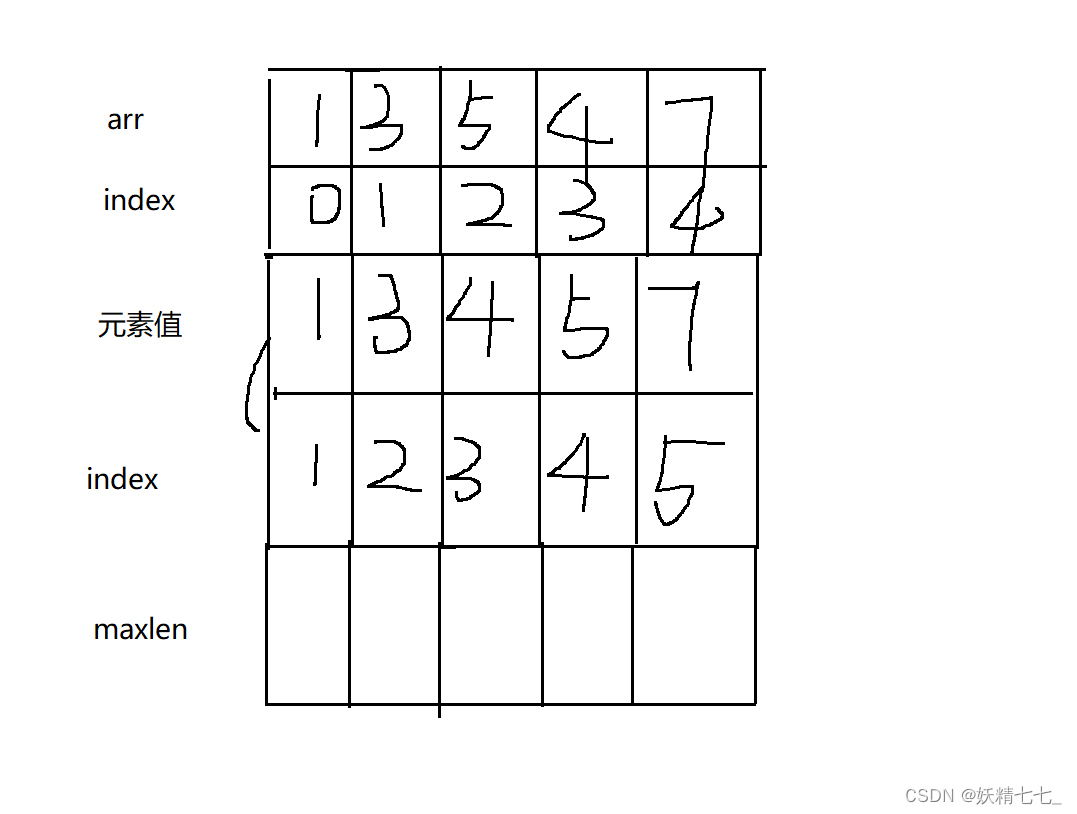
【一百零九】【算法分析与设计】树状数组求解前缀最大值,673. 最长递增子序列的个数,树状数组求前缀区间最大值
树状数组求解前缀最大值 树状数组可以求解和前缀区间有关的问题,例如前缀和,前缀区间最值. 可以利用 l o g n log_n logn的时间复杂度快速查找前缀信息. 利用树状数组查询前缀区间中最大值问题. 树状数组下标1位置存储arr数组下标1位置的最大值. 树状数组2位置存储arr数组1,…


《PyTorch 实战宝典》重磅发布!
Pytorch 是目前常用的深度学习框架之一,比起 TF 的框架环境配置不兼容,和 Keras 由于高度封装造成的不灵活,PyTorch 无论是在学术圈还是工业界,都相当占优势。
不夸张地说,掌握了 PyTorch ,就相当于走上了…
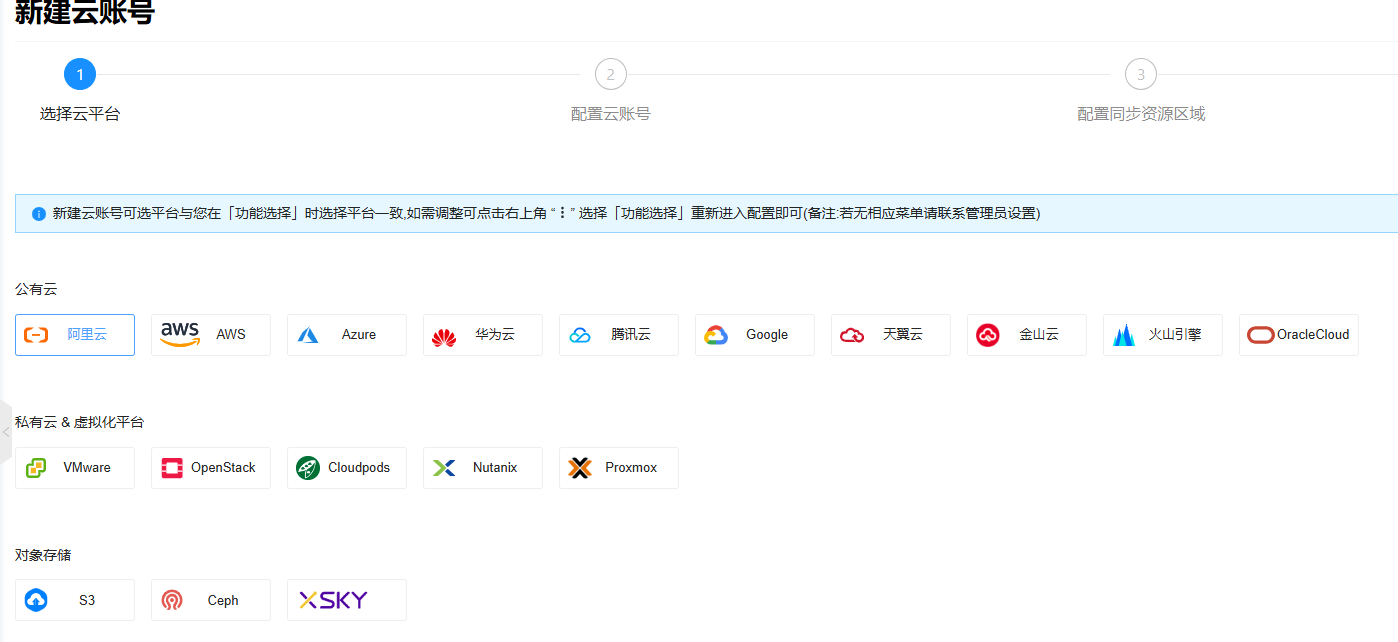
Cloudpods 强大的多云管理平台部署
简介
Cloudpods 是一款简单、可靠的企业IaaS资源管理软件。帮助未云化企业全面云化IDC物理资源,提升企业IT管理效率。
Cloudpods 帮助客户在一个地方管理所有云计算资源。统一管理异构IT基础设施资源,极大简化多云架构复杂度和难度,帮助企业…