2.3 ANALYZING THE BR2 BASICS PACKAGE 这一节内容有些多……
前一篇:
ROS2机器人编程简述humble-第二章-DEVELOPING THE FIRST NODE .2
里面只有节点,没有任何实际功能。
logger.cpp代码如下所示:
#include "rclcpp/rclcpp.hpp"
using namespace std::chrono_literals;
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
auto node = rclcpp::Node::make_shared("logger_node");
rclcpp::Rate loop_rate(500ms);
int counter = 0;
while (rclcpp::ok()) {
RCLCPP_INFO(node->get_logger(), "Hello %d", counter++);
rclcpp::spin_some(node);
loop_rate.sleep();
}
rclcpp::shutdown();
return 0;
}
这是一段代码“实现在固定时间执行任务“
周期:rclcpp::Rate loop_rate(500ms);
消息:RCLCPP_INFO(node->get_logger(), "Hello %d", counter++);
ROS消息通常具备时间戳!
rclcpp::spin_some(node);
参考官方文档如下:
rclcpp::spin
Create a default single-threaded executor and spin the specified node.
创建默认的单线程执行器并跳转指定的节点。
rclcpp::spin_some
Create a default single-threaded executor and execute any immediately available work.
创建默认的单线程执行器并执行任何立即可用的工作。
rclcpp::spin_until_future_complete
rcl_interfaces/msg/Log.msg
# Debug is for pedantic information, which is useful when debugging issues.
byte DEBUG=10
# Info is the standard informational level and is used to report expected
# information.
byte INFO=20
# Warning is for information that may potentially cause issues or possibly unexpected
# behavior.
byte WARN=30
# Error is for information that this node cannot resolve.
byte ERROR=40
# Information about a impending node shutdown.
byte FATAL=50
#
# Fields
#
# Timestamp when this message was generated by the node.
builtin_interfaces/Time stamp
# Corresponding log level, see above definitions.
uint8 level
# The name representing the logger this message came from.
string name
# The full log message.
string msg
# The file the message came from.
string file
# The function the message came from.
string function
# The line in the file the message came from.
uint32 line
重要图示:

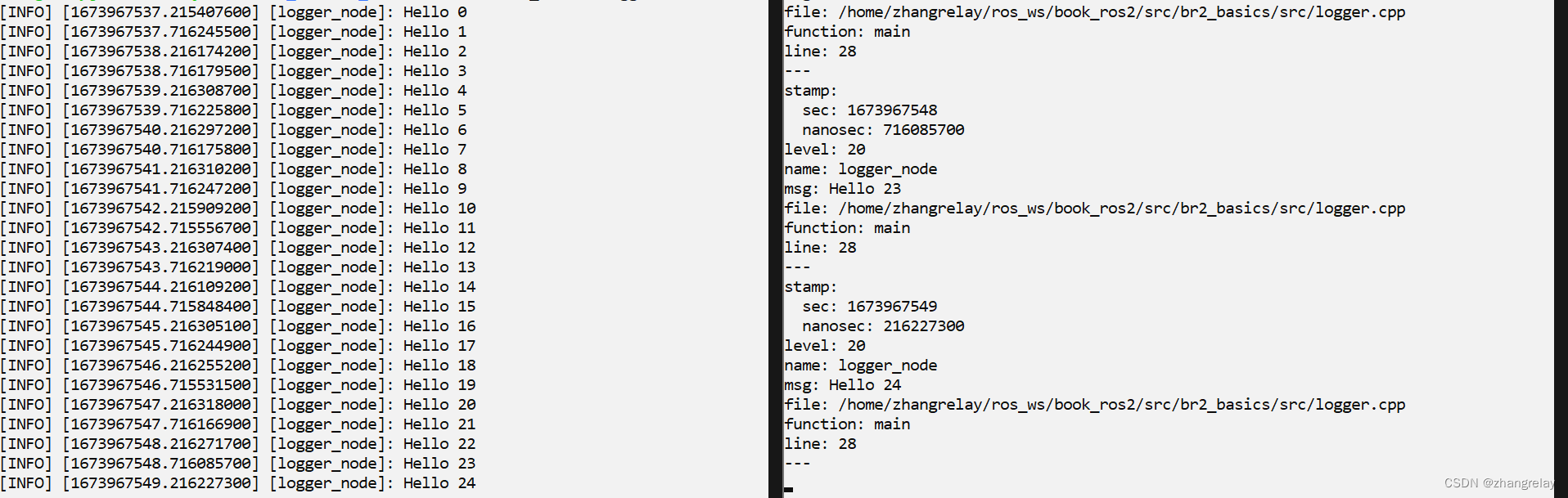
ros2 run br2_basics logger
ros2 topic echo /rosout
ros2 interface show rcl_interfaces/msg/Log
另一种实现方法:
#include "rclcpp/rclcpp.hpp"
using namespace std::chrono_literals;
class LoggerNode : public rclcpp::Node
{
public:
LoggerNode()
: Node("logger_node")
{
counter_ = 0;
timer_ = create_wall_timer(
500ms, std::bind(&LoggerNode::timer_callback, this));
}
void timer_callback()
{
RCLCPP_INFO(get_logger(), "Hello %d", counter_++);
}
private:
rclcpp::TimerBase::SharedPtr timer_;
int counter_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
auto node = std::make_shared<LoggerNode>();
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
计时器控制控制回路。该计时器以所需频率产生事件。当发生此事件时,它调用处理它的回调。优点是节点在内部调整执行频率,而不将此决定委托给外部代码。安排节点以了解它们的运行频率。
timer_ = create_wall_timer(
500ms, std::bind(&LoggerNode::timer_callback, this));
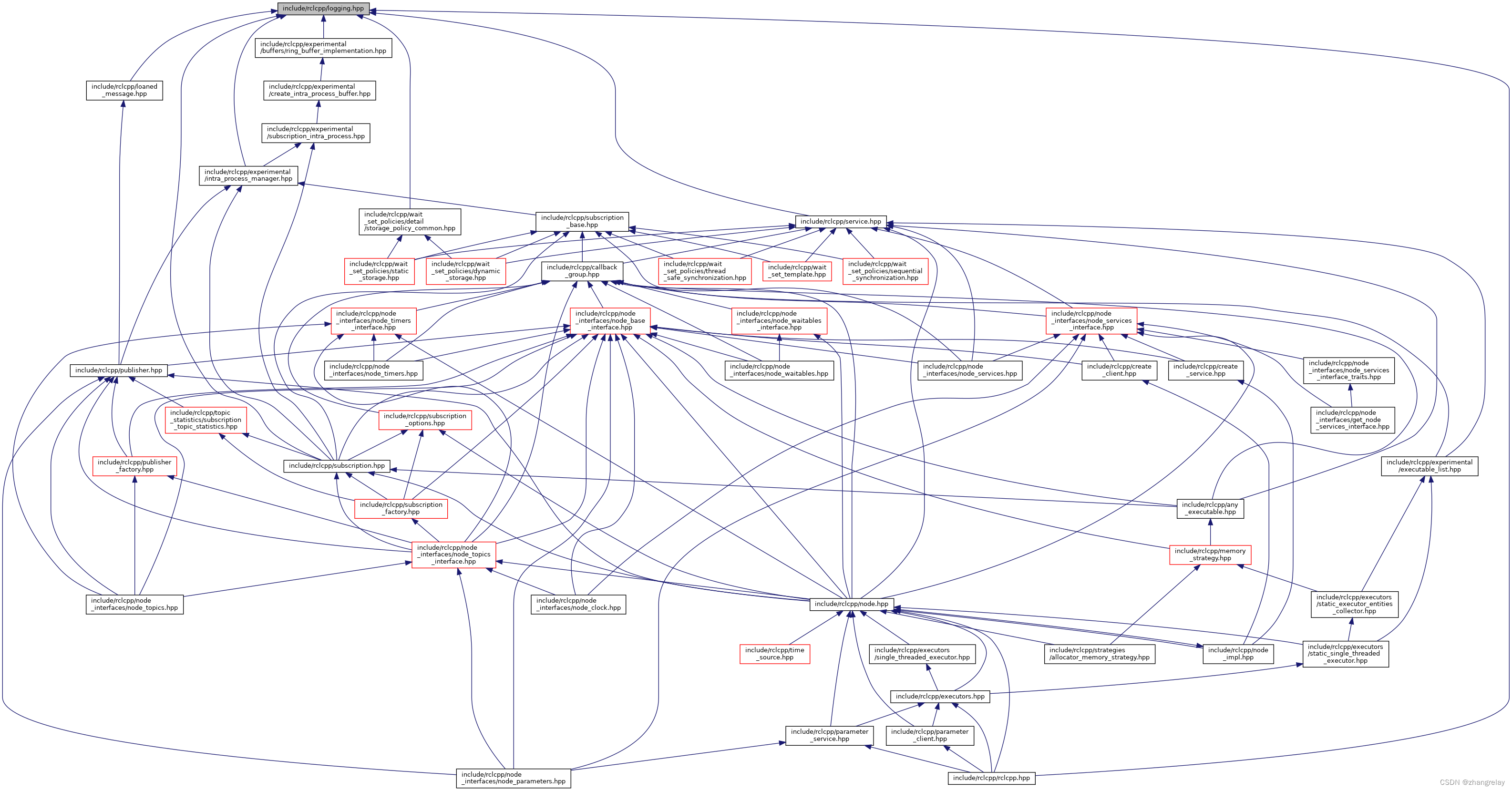
rclcpp: ROS Client Library for C++
rclcpp provides the canonical C++ API for interacting with ROS. It consists of these main components:
Node
rclcpp::Node
rclcpp/node.hpp
Publisher
rclcpp::Node::create_publisher()
rclcpp::Publisher
rclcpp::Publisher::publish()
rclcpp/publisher.hpp
Subscription
rclcpp::Node::create_subscription()
rclcpp::Subscription
rclcpp/subscription.hpp
Service Client
rclcpp::Node::create_client()
rclcpp::Client
rclcpp/client.hpp
Service Server
rclcpp::Node::create_service()
rclcpp::Service
rclcpp/service.hpp
Timer
rclcpp::Node::create_wall_timer()
rclcpp::WallTimer
rclcpp::TimerBase
rclcpp/timer.hpp
Parameters:
rclcpp::Node::set_parameters()
rclcpp::Node::get_parameters()
rclcpp::Node::get_parameter()
rclcpp::Node::describe_parameters()
rclcpp::Node::list_parameters()
rclcpp::Node::add_on_set_parameters_callback()
rclcpp::Node::remove_on_set_parameters_callback()
rclcpp::Parameter
rclcpp::ParameterValue
rclcpp::AsyncParametersClient
rclcpp::SyncParametersClient
rclcpp/parameter.hpp
rclcpp/parameter_value.hpp
rclcpp/parameter_client.hpp
rclcpp/parameter_service.hpp
Rate:
rclcpp::Rate
rclcpp::WallRate
rclcpp/rate.hpp
There are also some components which help control the execution of callbacks:
Executors (responsible for execution of callbacks through a blocking spin):
rclcpp::spin()
rclcpp::spin_some()
rclcpp::spin_until_future_complete()
rclcpp::executors::SingleThreadedExecutor
rclcpp::executors::SingleThreadedExecutor::add_node()
rclcpp::executors::SingleThreadedExecutor::spin()
rclcpp::executors::MultiThreadedExecutor
rclcpp::executors::MultiThreadedExecutor::add_node()
rclcpp::executors::MultiThreadedExecutor::spin()
rclcpp/executor.hpp
rclcpp/executors.hpp
rclcpp/executors/single_threaded_executor.hpp
rclcpp/executors/multi_threaded_executor.hpp
CallbackGroups (mechanism for enforcing concurrency rules for callbacks):
rclcpp::Node::create_callback_group()
rclcpp::CallbackGroup
rclcpp/callback_group.hpp
Additionally, there are some methods for introspecting the ROS graph:
Graph Events (a waitable event object that wakes up when the graph changes):
rclcpp::Node::get_graph_event()
rclcpp::Node::wait_for_graph_change()
rclcpp::Event
List topic names and types:
rclcpp::Node::get_topic_names_and_types()
Get the number of publishers or subscribers on a topic:
rclcpp::Node::count_publishers()
rclcpp::Node::count_subscribers()
And components related to logging:
Logging macros:
Some examples (not exhaustive):
RCLCPP_DEBUG()
RCLCPP_INFO()
RCLCPP_WARN_ONCE()
RCLCPP_ERROR_SKIPFIRST()
rclcpp/logging.hpp
Logger:
rclcpp::Logger
rclcpp/logger.hpp
rclcpp::Node::get_logger()
Finally, there are many internal API's and utilities:
Exceptions:
rclcpp/exceptions.hpp
Allocator related items:
rclcpp/allocator/allocator_common.hpp
rclcpp/allocator/allocator_deleter.hpp
Memory management tools:
rclcpp/memory_strategies.hpp
rclcpp/memory_strategy.hpp
rclcpp/message_memory_strategy.hpp
rclcpp/strategies/allocator_memory_strategy.hpp
rclcpp/strategies/message_pool_memory_strategy.hpp
Context object which is shared amongst multiple Nodes:
rclcpp::Context
rclcpp/context.hpp
rclcpp/contexts/default_context.hpp
Various utilities:
rclcpp/duration.hpp
rclcpp/function_traits.hpp
rclcpp/macros.hpp
rclcpp/scope_exit.hpp
rclcpp/time.hpp
rclcpp/utilities.hpp
rclcpp/visibility_control.hpp