一,用户空间访问v4l2设备步骤
V4L2(Video for Linux 2)是Linux中关于视频设备的内核驱动,它使得Linux系统能够支持视频设备,如摄像头。对于Camera V4L2的应用编程,一般遵循以下步骤:
1,打开设备:
使用open()函数打开视频设备文件,通常位于/dev/videoX(X为设备编号,如0、1等)。
2,查询设备功能:
使用ioctl()函数和VIDIOC_QUERYCAP命令来查询设备的功能和属性,如是否支持视频捕获、是否支持流I/O等。
3,设置图像格式:
使用ioctl()函数和VIDIOC_ENUM_FMT、VIDIOC_S_FMT等命令来设置视频捕获的格式,如分辨率、颜色空间等。
4, 设置缓存:
使用ioctl()函数和VIDIOC_REQBUFS命令来请求一定数量的帧缓冲区(buffers),并可能需要使用mmap()函数将内核空间的帧缓冲区映射到用户空间。
5,开始捕获:
如果设备支持流I/O,可以使用ioctl()函数和VIDIOC_STREAMON命令开始视频捕获。
6,读取数据:
通过之前映射的帧缓冲区地址,可以直接访问捕获的视频帧数据。也可以使用read()函数从设备文件中读取数据,但这通常不是首选方法,因为效率较低。
7,停止捕获:
使用ioctl()函数和VIDIOC_STREAMOFF命令停止视频捕获。
8,关闭设备:
使用close()函数关闭视频设备文件。
9, 释放资源:
如果之前使用了mmap()映射了帧缓冲区,需要使用munmap()函数来取消映射。
在编程过程中,可能还需要考虑其他因素,如错误处理、多线程/多进程同步、内存管理等。同时,由于V4L2 API的复杂性和设备驱动的不同实现,具体的编程步骤和细节可能会有所不同。因此,在实际编程时,建议参考相关的文档和示例代码。
二、v4l2 API介绍
查询设备的功能
由于V4L2涵盖了各种各样的设备,因此并非API的所有方面都适用于所有类型的设备,在使用v4l2设备时,必须调用此API,获得设备支持的功能(capture、output、overlay…)

图像格式
图像由多种格式YUV和RGB还有压缩格式等等,其中每种格式又分有多种格式,比如RGB:RGB565、RGB888…
所以在使用设备时,需要对格式进行设置
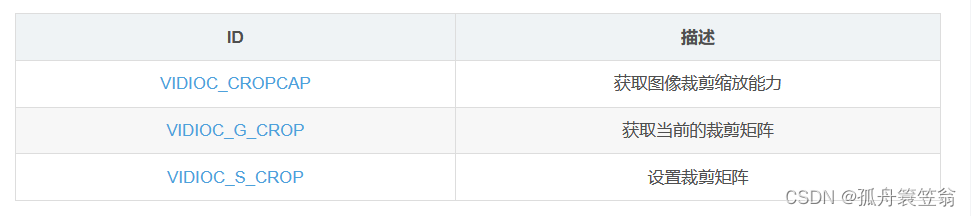
 图像裁剪、插入与缩放
图像裁剪、插入与缩放
 数据的输入和输出
数据的输入和输出
内核中使用缓存队列对图像数据进行管理,用户空间获取图像数据有两种方式,一种是通过read、write方式读取内核空间的缓存,一种是将内核空间的缓存映射到用户空间。在操作v4l2设备时,通过VIDIOC_QUERYCAP获取设备支持哪种方式
 ioctl API就先介绍到这里,还有非常多的接口这里就不一一介绍了,具体可以查看V4L2 Function Reference
ioctl API就先介绍到这里,还有非常多的接口这里就不一一介绍了,具体可以查看V4L2 Function Reference
三、v4l2设备操作流程
V4L2支持多种接口:capture(捕获)、output(输出)、overlay(预览)等等
这里讲解如何使用capture功能,下面讲解操作流程
step1:打开设备
在Linux中,视频设备节点为/dev/videox,使用open函数将其打开
int fd = open(name, flag);
if(fd < 0)
{
printf("ERR(%s):failed to open %s\n", __func__, name);
return -1;
}
return fd;
step 2:查询设备功能
if (ioctl(fd, VIDIOC_QUERYCAP, cap) < 0)
{
printf("ERR(%s):VIDIOC_QUERYCAP failed\n", __func__);
return -1;
}
看一看v4l2_capability
struct v4l2_capability {
__u8 driver[16]; /* i.e. "bttv" */
__u8 card[32]; /* i.e. "Hauppauge WinTV" */
__u8 bus_info[32]; /* "PCI:" + pci_name(pci_dev) */
__u32 version; /* should use KERNEL_VERSION() */
__u32 capabilities; /* Device capabilities */
__u32 reserved[4];
};
其中最重要的是capabilities字段,这个字段标记着v4l2设备的功能,capabilities有以下部分标记位
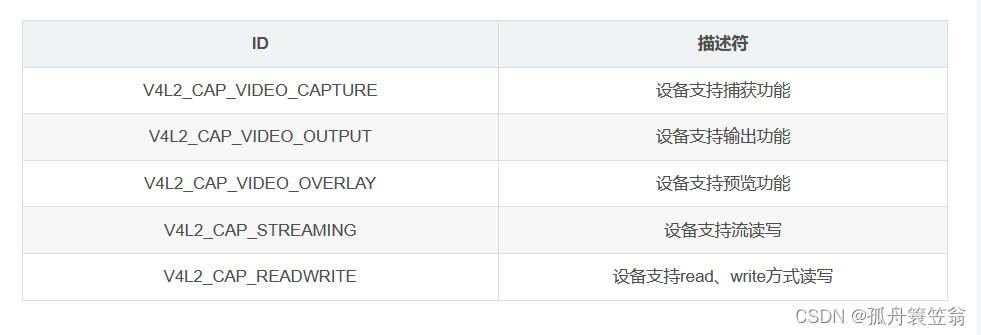 step 3:设置图像格式
step 3:设置图像格式
有的摄像头支持多种像素格式,有的摄像头只支持一种像素格式,在设置格式之前,要先枚举出所有的格式,看一看是否支持要设置的格式,然后再进一步设置
1.枚举支持的像素格式
struct v4l2_fmtdesc fmtdesc;
fmtdesc.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
fmtdesc.index = 0;
while (!ioctl(fd, VIDIOC_ENUM_FMT, &fmtdesc))
{
printf("fmt:%s\n", fmtdesc.description);
fmtdesc.index++;
}
2.设置像素格式
struct v4l2_format v4l2_fmt;
memset(&v4l2_fmt, 0, sizeof(struct v4l2_format));
v4l2_fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
v4l2_fmt.fmt.pix.width = width; //宽度
v4l2_fmt.fmt.pix.height = height; //高度
v4l2_fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_YUYV; //像素格式
v4l2_fmt.fmt.pix.field = V4L2_FIELD_ANY;
if (ioctl(fd, VIDIOC_S_FMT, &v4l2_fmt) < 0)
{
printf("ERR(%s):VIDIOC_S_FMT failed\n", __func__);
return -1;
}
step 4:设置缓存
v4l2设备读取数据的方式有两种,一种是read方式,一种是streaming方式,具体需要看step 2的返回结果是支持V4L2_CAP_READWRITE还是V4L2_CAP_STREAMING
read方式很容易理解,就是通过read函数读取,那么streaming是什么意思呢?
streaming就是在内核空间中维护一个缓存队列,然后将内存映射到用户空间,应用读取图像数据就是一个不断地出队列和入队列的过程,如下图所示
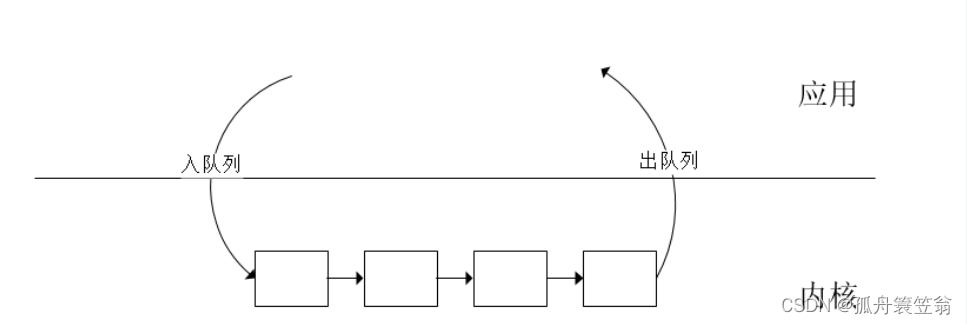
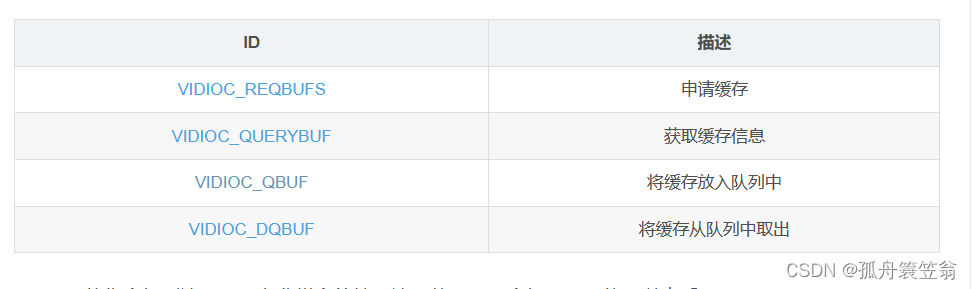
下面讲解如何去申请和映射缓存
1.申请缓存
struct v4l2_requestbuffers req;
req.count = nr_bufs; //缓存数量
req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
req.memory = V4L2_MEMORY_MMAP;
if (ioctl(fd, VIDIOC_REQBUFS, &req) < 0)
{
printf("ERR(%s):VIDIOC_REQBUFS failed\n", __func__);
return -1;
}
2.映射缓存
为什么要映射缓存?
因为如果使用read方式读取的话,图像数据是从内核空间拷贝会应用空间,而一副图像的数据一般来讲是比较大的,所以效率会比较低。而如果使用映射的方式,讲内核空间的内存应用到用户空间,那么用户空间读取数据就想在操作内存一样,不需要经过内核空间到用户空间的拷贝,大大提高效率
映射缓存需要先查询缓存信息,然后再使用缓存信息进行映射,下面是一个例子
struct v4l2_buffer v4l2_buffer;
void* addr;
memset(&v4l2_buffer, 0, sizeof(struct v4l2_buffer));
v4l2_buffer.index = i; //想要查询的缓存
v4l2_buffer.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
v4l2_buffer.memory = V4L2_MEMORY_MMAP;
/* 查询缓存信息 */
ret = ioctl(fd, VIDIOC_QUERYBUF, &v4l2_buffer);
if(ret < 0)
{
printf("Unable to query buffer.\n");
return -1;
}
/* 映射 */
addr = mmap(NULL /* start anywhere */ ,
v4l2_buffer.length, PROT_READ | PROT_WRITE, MAP_SHARED,
fd, v4l2_buffer.m.offset);
注:需要将所有申请的缓存使用上述方法进行映射
3.将所有的缓存放入队列
struct v4l2_buffer v4l2_buffer;
for(i = 0; i < nr_bufs; i++)
{
memset(&v4l2_buffer, 0, sizeof(struct v4l2_buffer));
v4l2_buffer.index = i; //想要放入队列的缓存
v4l2_buffer.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
v4l2_buffer.memory = V4L2_MEMORY_MMAP;
ret = ioctl(fd, VIDIOC_QBUF, &v4l2_buffer);
if(ret < 0)
{
printf("Unable to queue buffer.\n");
return -1;
}
}
step 5:打开设备
enum v4l2_buf_type type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
if (ioctl(fd, VIDIOC_STREAMON, &type) < 0)
{
printf("ERR(%s):VIDIOC_STREAMON failed\n", __func__);
return -1;
}
step 7:读取数据
获取图像数据其实就是一个不断地入队列和出队列地过程
出队列
struct v4l2_buffer buffer;
buffer.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buffer.memory = V4L2_MEMORY_MMAP;
if (ioctl(fd, VIDIOC_DQBUF, &buffer) < 0)
{
printf("ERR(%s):VIDIOC_DQBUF failed, dropped frame\n", __func__);
return -1;
}
出队列后得到了缓存的下标buffer.index,然后找到对饮的缓存,通过映射过后的地址进行数据的读取
入队列
再数据读取完成后,要将buf重新放入队列中
struct v4l2_buffer v4l2_buf;
v4l2_buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
v4l2_buf.memory = V4L2_MEMORY_MMAP;
v4l2_buf.index = i; //指定buf
if (ioctl(fd, VIDIOC_QBUF, &v4l2_buf) < 0)
{
printf("ERR(%s):VIDIOC_QBUF failed\n", __func__);
return -1;
}
读取数据就是在上面一直不断地循环
step 7:关闭设备
1.关闭设备
enum v4l2_buf_type type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
if (ioctl(fd, VIDIOC_STREAMOFF, &type) < 0)
{
printf("ERR(%s):VIDIOC_STREAMOFF failed\n", __func__);
return -1;
}
2.取消映射
for(i = 0; i < nr_bufs; ++i)
munmap(buf[i].addr, buf[i]->length);
3.关闭文件描述符
close(fd);
四,uvc camera v4l2应用编程参考代码
当使用V4L2 (Video for Linux 2) API来编程与UVC (USB Video Class) 摄像头交互时,你可以参考以下的基本代码框架。请注意,这只是一个简化的示例,用于说明基本的编程步骤,并且可能需要根据你的具体需求进行调整。
首先,你需要包含必要的头文件,并定义一些常用的错误处理宏:
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <fcntl.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <sys/mman.h>
#include <linux/videodev2.h>
#define CLEAR(x) memset(&(x), 0, sizeof(x))
#define ERROR_HANDLER(ret, fmt, ...) \
do { \
if (ret < 0) { \
fprintf(stderr, "Error at %s:%d, %s\n -> ", __FILE__, __LINE__, fmt); \
perror(NULL); \
exit(EXIT_FAILURE); \
} \
} while (0)
接下来是主程序框架,它打开设备、设置参数、捕获数据,并最后关闭设备:
int main(int argc, char **argv) {
struct v4l2_capability cap;
struct v4l2_format fmt;
struct v4l2_requestbuffers req;
enum v4l2_buf_type type;
struct v4l2_buffer buf;
unsigned int i;
int fd = -1;
void *buffers[4];
// 打开设备
fd = open("/dev/video0", O_RDWR | O_NONBLOCK, 0);
if (fd == -1) {
perror("open");
exit(EXIT_FAILURE);
}
// 查询设备能力
CLEAR(cap);
ERROR_HANDLER(ioctl(fd, VIDIOC_QUERYCAP, &cap), "VIDIOC_QUERYCAP");
// 确保设备支持视频捕获
if (!(cap.capabilities & V4L2_CAP_VIDEO_CAPTURE)) {
fprintf(stderr, "%s is no video capture device\n", argv[0]);
exit(EXIT_FAILURE);
}
// 设置视频格式(这里只是一个示例,需要根据你的摄像头支持的格式来设置)
CLEAR(fmt);
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
fmt.fmt.pix.width = 640;
fmt.fmt.pix.height = 480;
fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_YUYV; // 或者其他支持的格式
fmt.fmt.pix.field = V4L2_FIELD_INTERLACED;
ERROR_HANDLER(ioctl(fd, VIDIOC_S_FMT, &fmt), "VIDIOC_S_FMT");
// 请求缓冲区
CLEAR(req);
req.count = 4;
req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
req.memory = V4L2_MEMORY_MMAP;
ERROR_HANDLER(ioctl(fd, VIDIOC_REQBUFS, &req), "VIDIOC_REQBUFS");
// 映射缓冲区
for (i = 0; i < req.count; ++i) {
CLEAR(buf);
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
buf.index = i;
ERROR_HANDLER(ioctl(fd, VIDIOC_QUERYBUF, &buf), "VIDIOC_QUERYBUF");
buffers[i] = mmap(NULL /* start anywhere */,
buf.length,
PROT_READ | PROT_WRITE, /* required */
MAP_SHARED /* recommended */,
fd, buf.m.offset);
if (buffers[i] == MAP_FAILED) {
perror("mmap");
exit(EXIT_FAILURE);
}
}
// 开始捕获
enum v4l2_buf_type type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
ERROR_HANDLER(ioctl(fd, VIDIOC_STREAMON, &type), "VIDIOC_STREAMON");
// 在这里添加循环来捕获和处理数据
暂时分析到这里,后续在更新!