ROS2机器人编程简述新书推荐-A Concise Introduction to Robot Programming with ROS2
学习笔记流水账-推荐阅读原书。
第一章:简要介绍宏观概念,配置编译一下本书配套的源码包。
支持版本个人测试foxy和humble全部都OK。
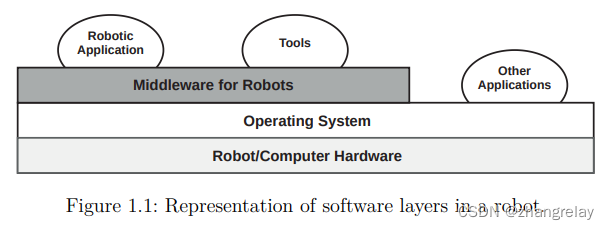
硬件+软件+机器人应用关系如下图所示:
ROS2最新的长期支持版本humble:

官方支持到:2027年5月
•社区:ROS社区是使用此中间件开发机器人应用程序的基本要素。除了提供技术文档外,还有一个庞大的开发人员社区,他们通过公共存储库为自己的应用程序和实用程序做出贡献,其他开发人员也可以为其做出贡献。社区的另一个成员可能已经开发了您需要的东西。
•计算图:计算图是一个正在运行的ROS2应用程序。该图由节点和弧组成。节点(ROS2中的主要计算单元)可以使用几种不同的通信范式与其他节点协作,以组成ROS2应用程序。此维度还处理监视工具,这些工具也是插入到此图中的节点。
•工作区:工作区是安装在机器人或计算机上的一组软件,以及用户开发的程序。与具有动态性质的计算图不同,工作区是静态的。这个维度还涉及构建计算图元素的开发工具。
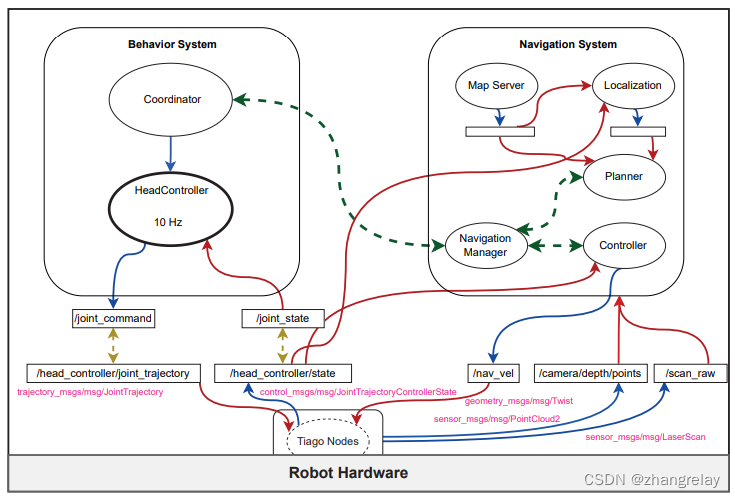
使用导航子系统的Tiago机器人基于行为的应用程序的计算图如下所示:
需要先安装标准桌面版ros2-humble。
请参考官网:sudo apt install ros-humble-desktop
记录如下
zhangrelay@LAPTOP-5REQ7K1L:~/ros_ws/book_ros2$ sudo apt install ros-humble-desktop
[sudo] password for zhangrelay:
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
ros-humble-desktop is already the newest version (0.10.0-1jammy.20221207.081220).
0 upgraded, 0 newly installed, 0 to remove and 0 not upgraded.配置缺失功能包:rosdep install --from-paths src --ignore-src -r -y
记录如下:
zhangrelay@LAPTOP-5REQ7K1L:~/ros_ws/book_ros2$ rosdep install --from-paths src --ignore-src -r -y
executing command [sudo -H apt-get install -y ros-humble-gazebo-ros2-control]
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
The following additional packages will be installed:
ros-humble-control-msgs ros-humble-controller-interface
ros-humble-controller-manager ros-humble-controller-manager-msgs
ros-humble-hardware-interface ros-humble-realtime-tools
ros-humble-ros2-control-test-assets
The following NEW packages will be installed:
ros-humble-control-msgs ros-humble-controller-interface
ros-humble-controller-manager ros-humble-controller-manager-msgs
ros-humble-gazebo-ros2-control ros-humble-hardware-interface
ros-humble-realtime-tools ros-humble-ros2-control-test-assets
0 upgraded, 8 newly installed, 0 to remove and 0 not upgraded.
Need to get 1,353 kB of archives.
After this operation, 13.4 MB of additional disk space will be used.
Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-control-msgs amd64 4.1.0-1jammy.20221108.173042 [345 kB]
Get:2 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-hardware-interface amd64 2.18.0-1jammy.20221206.193309 [221 kB]
Get:3 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-controller-interface amd64 2.18.0-1jammy.20221206.193752 [31.6 kB]
Get:4 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-controller-manager-msgs amd64 2.18.0-1jammy.20221206.193123 [200 kB]
Get:5 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-realtime-tools amd64 2.4.0-1jammy.20221202.024821 [24.2 kB]
Get:6 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-ros2-control-test-assets amd64 2.18.0-1jammy.20221206.193145 [11.4 kB]
Get:7 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-controller-manager amd64 2.18.0-1jammy.20221207.042157 [327 kB]
Get:8 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-gazebo-ros2-control amd64 0.4.0-1jammy.20221207.061606 [192 kB]
Fetched 1,353 kB in 13s (106 kB/s)
Selecting previously unselected package ros-humble-control-msgs.
(Reading database ... 180542 files and directories currently installed.)
Preparing to unpack .../0-ros-humble-control-msgs_4.1.0-1jammy.20221108.173042_amd64.deb ...
Unpacking ros-humble-control-msgs (4.1.0-1jammy.20221108.173042) ...
Selecting previously unselected package ros-humble-hardware-interface.
Preparing to unpack .../1-ros-humble-hardware-interface_2.18.0-1jammy.20221206.193309_amd64.deb ...
Unpacking ros-humble-hardware-interface (2.18.0-1jammy.20221206.193309) ...
Selecting previously unselected package ros-humble-controller-interface.
Preparing to unpack .../2-ros-humble-controller-interface_2.18.0-1jammy.20221206.193752_amd64.deb ...
Unpacking ros-humble-controller-interface (2.18.0-1jammy.20221206.193752) ...
Selecting previously unselected package ros-humble-controller-manager-msgs.
Preparing to unpack .../3-ros-humble-controller-manager-msgs_2.18.0-1jammy.20221206.193123_amd64.deb ...
Unpacking ros-humble-controller-manager-msgs (2.18.0-1jammy.20221206.193123) ...
Selecting previously unselected package ros-humble-realtime-tools.
Preparing to unpack .../4-ros-humble-realtime-tools_2.4.0-1jammy.20221202.024821_amd64.deb ...
Unpacking ros-humble-realtime-tools (2.4.0-1jammy.20221202.024821) ...
Selecting previously unselected package ros-humble-ros2-control-test-assets.
Preparing to unpack .../5-ros-humble-ros2-control-test-assets_2.18.0-1jammy.20221206.193145_amd64.deb ...
Unpacking ros-humble-ros2-control-test-assets (2.18.0-1jammy.20221206.193145) ...
Selecting previously unselected package ros-humble-controller-manager.
Preparing to unpack .../6-ros-humble-controller-manager_2.18.0-1jammy.20221207.042157_amd64.deb ...
Unpacking ros-humble-controller-manager (2.18.0-1jammy.20221207.042157) ...
Selecting previously unselected package ros-humble-gazebo-ros2-control.
Preparing to unpack .../7-ros-humble-gazebo-ros2-control_0.4.0-1jammy.20221207.061606_amd64.deb ...
Unpacking ros-humble-gazebo-ros2-control (0.4.0-1jammy.20221207.061606) ...
Setting up ros-humble-ros2-control-test-assets (2.18.0-1jammy.20221206.193145) ...
Setting up ros-humble-control-msgs (4.1.0-1jammy.20221108.173042) ...
Setting up ros-humble-realtime-tools (2.4.0-1jammy.20221202.024821) ...
Setting up ros-humble-controller-manager-msgs (2.18.0-1jammy.20221206.193123) ...
Setting up ros-humble-hardware-interface (2.18.0-1jammy.20221206.193309) ...
Setting up ros-humble-controller-interface (2.18.0-1jammy.20221206.193752) ...
Setting up ros-humble-controller-manager (2.18.0-1jammy.20221207.042157) ...
Setting up ros-humble-gazebo-ros2-control (0.4.0-1jammy.20221207.061606) ...
Processing triggers for libc-bin (2.35-0ubuntu3.1) ...
Scanning processes...
Scanning processor microcode...
Scanning linux images...
Failed to retrieve available kernel versions.
Failed to check for processor microcode upgrades.
No services need to be restarted.
No containers need to be restarted.
No user sessions are running outdated binaries.
No VM guests are running outdated hypervisor (qemu) binaries on this host.
executing command [sudo -H apt-get install -y ros-humble-controller-manager]
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
ros-humble-controller-manager is already the newest version (2.18.0-1jammy.20221207.042157).
ros-humble-controller-manager set to manually installed.
0 upgraded, 0 newly installed, 0 to remove and 0 not upgraded.
executing command [sudo -H apt-get install -y ros-humble-diff-drive-controller]
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
The following NEW packages will be installed:
ros-humble-diff-drive-controller
0 upgraded, 1 newly installed, 0 to remove and 0 not upgraded.
Need to get 187 kB of archives.
After this operation, 987 kB of additional disk space will be used.
Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-diff-drive-controller amd64 2.15.0-1jammy.20221207.061747 [187 kB]
Fetched 187 kB in 5s (40.8 kB/s)
Selecting previously unselected package ros-humble-diff-drive-controller.
(Reading database ... 181602 files and directories currently installed.)
Preparing to unpack .../ros-humble-diff-drive-controller_2.15.0-1jammy.20221207.061747_amd64.deb ...
Unpacking ros-humble-diff-drive-controller (2.15.0-1jammy.20221207.061747) ...
Setting up ros-humble-diff-drive-controller (2.15.0-1jammy.20221207.061747) ...
Scanning processes...
Scanning processor microcode...
Scanning linux images...
Failed to retrieve available kernel versions.
Failed to check for processor microcode upgrades.
No services need to be restarted.
No containers need to be restarted.
No user sessions are running outdated binaries.
No VM guests are running outdated hypervisor (qemu) binaries on this host.
executing command [sudo -H apt-get install -y ros-humble-joint-state-broadcaster]
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
The following additional packages will be installed:
python3-typeguard ros-humble-generate-parameter-library
ros-humble-generate-parameter-library-py ros-humble-parameter-traits
ros-humble-rsl ros-humble-tcb-span ros-humble-tl-expected
The following NEW packages will be installed:
python3-typeguard ros-humble-generate-parameter-library
ros-humble-generate-parameter-library-py ros-humble-joint-state-broadcaster
ros-humble-parameter-traits ros-humble-rsl ros-humble-tcb-span
ros-humble-tl-expected
0 upgraded, 8 newly installed, 0 to remove and 0 not upgraded.
Need to get 189 kB of archives.
After this operation, 946 kB of additional disk space will be used.
Get:1 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 python3-typeguard all 2.2.2-1.1 [13.3 kB]
Get:2 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-generate-parameter-library-py amd64 0.3.0-1jammy.20221128.191052 [23.9 kB]
Get:3 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-tcb-span amd64 1.0.2-2jammy.20221108.150956 [10.4 kB]
Get:4 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-tl-expected amd64 1.0.2-2jammy.20221108.151135 [16.4 kB]
Get:5 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-rsl amd64 0.2.1-1jammy.20221202.033627 [20.4 kB]
Get:6 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-parameter-traits amd64 0.3.0-1jammy.20221202.034430 [9,574 B]
Get:7 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-generate-parameter-library amd64 0.3.0-1jammy.20221202.034649 [7,758 B]
Get:8 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-joint-state-broadcaster amd64 2.15.0-1jammy.20221207.061953 [87.2 kB]
Fetched 189 kB in 16s (11.8 kB/s)
Selecting previously unselected package python3-typeguard.
(Reading database ... 181637 files and directories currently installed.)
Preparing to unpack .../0-python3-typeguard_2.2.2-1.1_all.deb ...
Unpacking python3-typeguard (2.2.2-1.1) ...
Selecting previously unselected package ros-humble-generate-parameter-library-py.
Preparing to unpack .../1-ros-humble-generate-parameter-library-py_0.3.0-1jammy.20221128.191052_amd64.deb ...
Unpacking ros-humble-generate-parameter-library-py (0.3.0-1jammy.20221128.191052) ...
Selecting previously unselected package ros-humble-tcb-span.
Preparing to unpack .../2-ros-humble-tcb-span_1.0.2-2jammy.20221108.150956_amd64.deb ...
Unpacking ros-humble-tcb-span (1.0.2-2jammy.20221108.150956) ...
Selecting previously unselected package ros-humble-tl-expected.
Preparing to unpack .../3-ros-humble-tl-expected_1.0.2-2jammy.20221108.151135_amd64.deb ...
Unpacking ros-humble-tl-expected (1.0.2-2jammy.20221108.151135) ...
Selecting previously unselected package ros-humble-rsl.
Preparing to unpack .../4-ros-humble-rsl_0.2.1-1jammy.20221202.033627_amd64.deb ...
Unpacking ros-humble-rsl (0.2.1-1jammy.20221202.033627) ...
Selecting previously unselected package ros-humble-parameter-traits.
Preparing to unpack .../5-ros-humble-parameter-traits_0.3.0-1jammy.20221202.034430_amd64.deb ...
Unpacking ros-humble-parameter-traits (0.3.0-1jammy.20221202.034430) ...
Selecting previously unselected package ros-humble-generate-parameter-library.
Preparing to unpack .../6-ros-humble-generate-parameter-library_0.3.0-1jammy.20221202.034649_amd64.deb ...
Unpacking ros-humble-generate-parameter-library (0.3.0-1jammy.20221202.034649) ...
Selecting previously unselected package ros-humble-joint-state-broadcaster.
Preparing to unpack .../7-ros-humble-joint-state-broadcaster_2.15.0-1jammy.20221207.061953_amd64.deb ...
Unpacking ros-humble-joint-state-broadcaster (2.15.0-1jammy.20221207.061953) ...
Setting up ros-humble-tl-expected (1.0.2-2jammy.20221108.151135) ...
Setting up python3-typeguard (2.2.2-1.1) ...
Setting up ros-humble-tcb-span (1.0.2-2jammy.20221108.150956) ...
Setting up ros-humble-generate-parameter-library-py (0.3.0-1jammy.20221128.191052) ...
Setting up ros-humble-rsl (0.2.1-1jammy.20221202.033627) ...
Setting up ros-humble-parameter-traits (0.3.0-1jammy.20221202.034430) ...
Setting up ros-humble-generate-parameter-library (0.3.0-1jammy.20221202.034649) ...
Setting up ros-humble-joint-state-broadcaster (2.15.0-1jammy.20221207.061953) ...
Scanning processes...
Scanning processor microcode...
Scanning linux images...
Failed to retrieve available kernel versions.
Failed to check for processor microcode upgrades.
No services need to be restarted.
No containers need to be restarted.
No user sessions are running outdated binaries.
No VM guests are running outdated hypervisor (qemu) binaries on this host.
executing command [sudo -H apt-get install -y ros-humble-joy-teleop]
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
The following additional packages will be installed:
ros-humble-teleop-tools-msgs
The following NEW packages will be installed:
ros-humble-joy-teleop ros-humble-teleop-tools-msgs
0 upgraded, 2 newly installed, 0 to remove and 0 not upgraded.
Need to get 94.3 kB of archives.
After this operation, 1,172 kB of additional disk space will be used.
Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-teleop-tools-msgs amd64 1.3.0-1jammy.20221128.183604 [75.7 kB]
Get:2 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-joy-teleop amd64 1.3.0-1jammy.20221207.031146 [18.6 kB]
Fetched 94.3 kB in 3s (27.2 kB/s)
Selecting previously unselected package ros-humble-teleop-tools-msgs.
(Reading database ... 181863 files and directories currently installed.)
Preparing to unpack .../ros-humble-teleop-tools-msgs_1.3.0-1jammy.20221128.183604_amd64.deb ...
Unpacking ros-humble-teleop-tools-msgs (1.3.0-1jammy.20221128.183604) ...
Selecting previously unselected package ros-humble-joy-teleop.
Preparing to unpack .../ros-humble-joy-teleop_1.3.0-1jammy.20221207.031146_amd64.deb ...
Unpacking ros-humble-joy-teleop (1.3.0-1jammy.20221207.031146) ...
Setting up ros-humble-teleop-tools-msgs (1.3.0-1jammy.20221128.183604) ...
Setting up ros-humble-joy-teleop (1.3.0-1jammy.20221207.031146) ...
Processing triggers for libc-bin (2.35-0ubuntu3.1) ...
Scanning processes...
Scanning processor microcode...
Scanning linux images...
Failed to retrieve available kernel versions.
Failed to check for processor microcode upgrades.
No services need to be restarted.
No containers need to be restarted.
No user sessions are running outdated binaries.
No VM guests are running outdated hypervisor (qemu) binaries on this host.
executing command [sudo -H apt-get install -y ros-humble-twist-mux]
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
The following NEW packages will be installed:
ros-humble-twist-mux
0 upgraded, 1 newly installed, 0 to remove and 0 not upgraded.
Need to get 212 kB of archives.
After this operation, 945 kB of additional disk space will be used.
Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-twist-mux amd64 4.1.0-3jammy.20221207.034508 [212 kB]
Fetched 212 kB in 17s (12.5 kB/s)
Selecting previously unselected package ros-humble-twist-mux.
(Reading database ... 181995 files and directories currently installed.)
Preparing to unpack .../ros-humble-twist-mux_4.1.0-3jammy.20221207.034508_amd64.deb ...
Unpacking ros-humble-twist-mux (4.1.0-3jammy.20221207.034508) ...
Setting up ros-humble-twist-mux (4.1.0-3jammy.20221207.034508) ...
Scanning processes...
Scanning processor microcode...
Scanning linux images...
Failed to retrieve available kernel versions.
Failed to check for processor microcode upgrades.
No services need to be restarted.
No containers need to be restarted.
No user sessions are running outdated binaries.
No VM guests are running outdated hypervisor (qemu) binaries on this host.
executing command [sudo -H apt-get install -y ros-humble-nav2-bringup]
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
The following additional packages will be installed:
libamd2 libbtf1 libcamd2 libccolamd2 libceres-dev libceres2 libcholmod3
libcolamd2 libcxsparse3 libgoogle-glog-dev libgoogle-glog0v5 libgraphblas-dev
libgraphblas6 libklu1 libldl2 libmetis5 libmongoose2 librbio2 libsliplu1 libspqr2
libsuitesparse-dev libsuitesparseconfig5 libumfpack5 libunwind-dev
nlohmann-json3-dev ros-humble-behaviortree-cpp-v3 ros-humble-costmap-queue
ros-humble-dwb-core ros-humble-dwb-critics ros-humble-dwb-msgs
ros-humble-dwb-plugins ros-humble-nav-2d-msgs ros-humble-nav-2d-utils
ros-humble-nav2-amcl ros-humble-nav2-behavior-tree ros-humble-nav2-behaviors
ros-humble-nav2-bt-navigator ros-humble-nav2-collision-monitor
ros-humble-nav2-constrained-smoother ros-humble-nav2-controller
ros-humble-nav2-core ros-humble-nav2-costmap-2d ros-humble-nav2-dwb-controller
ros-humble-nav2-navfn-planner ros-humble-nav2-planner
ros-humble-nav2-regulated-pure-pursuit-controller
ros-humble-nav2-rotation-shim-controller ros-humble-nav2-rviz-plugins
ros-humble-nav2-simple-commander ros-humble-nav2-smac-planner
ros-humble-nav2-smoother ros-humble-nav2-theta-star-planner
ros-humble-nav2-velocity-smoother ros-humble-nav2-voxel-grid
ros-humble-nav2-waypoint-follower ros-humble-navigation2 ros-humble-ompl
ros-humble-slam-toolbox
The following NEW packages will be installed:
libamd2 libbtf1 libcamd2 libccolamd2 libceres-dev libceres2 libcholmod3
libcolamd2 libcxsparse3 libgoogle-glog-dev libgoogle-glog0v5 libgraphblas-dev
libgraphblas6 libklu1 libldl2 libmetis5 libmongoose2 librbio2 libsliplu1 libspqr2
libsuitesparse-dev libsuitesparseconfig5 libumfpack5 libunwind-dev
nlohmann-json3-dev ros-humble-behaviortree-cpp-v3 ros-humble-costmap-queue
ros-humble-dwb-core ros-humble-dwb-critics ros-humble-dwb-msgs
ros-humble-dwb-plugins ros-humble-nav-2d-msgs ros-humble-nav-2d-utils
ros-humble-nav2-amcl ros-humble-nav2-behavior-tree ros-humble-nav2-behaviors
ros-humble-nav2-bringup ros-humble-nav2-bt-navigator
ros-humble-nav2-collision-monitor ros-humble-nav2-constrained-smoother
ros-humble-nav2-controller ros-humble-nav2-core ros-humble-nav2-costmap-2d
ros-humble-nav2-dwb-controller ros-humble-nav2-navfn-planner
ros-humble-nav2-planner ros-humble-nav2-regulated-pure-pursuit-controller
ros-humble-nav2-rotation-shim-controller ros-humble-nav2-rviz-plugins
ros-humble-nav2-simple-commander ros-humble-nav2-smac-planner
ros-humble-nav2-smoother ros-humble-nav2-theta-star-planner
ros-humble-nav2-velocity-smoother ros-humble-nav2-voxel-grid
ros-humble-nav2-waypoint-follower ros-humble-navigation2 ros-humble-ompl
ros-humble-slam-toolbox
0 upgraded, 59 newly installed, 0 to remove and 0 not upgraded.
Need to get 36.2 MB of archives.
After this operation, 249 MB of additional disk space will be used.
Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-behaviortree-cpp-v3 amd64 3.8.0-1jammy.20221202.022001 [285 kB]
Get:2 http://mirrors.aliyun.com/ubuntu jammy/main amd64 libsuitesparseconfig5 amd64 1:5.10.1+dfsg-4build1 [10.4 kB]
Get:3 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libamd2 amd64 1:5.10.1+dfsg-4build1 [21.6 kB]
Get:4 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libbtf1 amd64 1:5.10.1+dfsg-4build1 [12.1 kB]
Get:5 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libcamd2 amd64 1:5.10.1+dfsg-4build1 [23.3 kB]
Get:6 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libccolamd2 amd64 1:5.10.1+dfsg-4build1 [25.2 kB]
Get:7 http://mirrors.aliyun.com/ubuntu jammy/main amd64 libcolamd2 amd64 1:5.10.1+dfsg-4build1 [18.0 kB]
Get:8 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libmetis5 amd64 5.1.0.dfsg-7build2 [181 kB]
Get:9 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libcholmod3 amd64 1:5.10.1+dfsg-4build1 [346 kB]
Get:10 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libcxsparse3 amd64 1:5.10.1+dfsg-4build1 [70.8 kB]
Get:11 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libgoogle-glog0v5 amd64 0.5.0+really0.4.0-2 [60.3 kB]
Get:12 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libspqr2 amd64 1:5.10.1+dfsg-4build1 [71.6 kB]
Get:13 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libceres2 amd64 2.0.0+dfsg1-5 [834 kB]
Get:14 http://mirrors.aliyun.com/ubuntu jammy/main amd64 libunwind-dev amd64 1.3.2-2build2 [1,882 kB]
Get:15 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libgoogle-glog-dev amd64 0.5.0+really0.4.0-2 [91.9 kB]
Get:16 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libklu1 amd64 1:5.10.1+dfsg-4build1 [77.6 kB]
Get:17 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libldl2 amd64 1:5.10.1+dfsg-4build1 [11.7 kB]
Get:18 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libmongoose2 amd64 1:5.10.1+dfsg-4build1 [33.5 kB]
Get:19 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-voxel-grid amd64 1.1.3-1jammy.20221207.041245 [19.5 kB]
Get:20 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libumfpack5 amd64 1:5.10.1+dfsg-4build1 [250 kB]
Get:21 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 librbio2 amd64 1:5.10.1+dfsg-4build1 [26.6 kB]
Get:22 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libsliplu1 amd64 1:5.10.1+dfsg-4build1 [37.1 kB]
Get:23 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-costmap-2d amd64 1.1.3-1jammy.20221207.050306 [895 kB]
Get:24 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libsuitesparse-dev amd64 1:5.10.1+dfsg-4build1 [1,058 kB]
Get:25 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libceres-dev amd64 2.0.0+dfsg1-5 [1,177 kB]
Get:26 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libgraphblas6 amd64 6.1.4+dfsg-2 [20.1 MB]
Get:27 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libgraphblas-dev amd64 6.1.4+dfsg-2 [54.4 kB]
Get:28 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 nlohmann-json3-dev all 3.10.5-2 [167 kB]
Get:29 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-costmap-queue amd64 1.1.3-1jammy.20221207.063710 [19.1 kB]
Get:30 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav-2d-msgs amd64 1.1.3-1jammy.20221110.224153 [68.0 kB]
Get:31 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-dwb-msgs amd64 1.1.3-1jammy.20221110.224320 [129 kB]
Get:32 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav-2d-utils amd64 1.1.3-1jammy.20221207.044652 [24.1 kB]
Get:33 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-core amd64 1.1.3-1jammy.20221207.051902 [11.0 kB]
Get:34 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-dwb-core amd64 1.1.3-1jammy.20221207.052140 [190 kB]
Get:35 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-dwb-critics amd64 1.1.3-1jammy.20221207.063858 [61.6 kB]
Get:36 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-dwb-plugins amd64 1.1.3-1jammy.20221207.053319 [45.6 kB]
Get:37 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-amcl amd64 1.1.3-1jammy.20221207.044549 [345 kB]
Get:38 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-behavior-tree amd64 1.1.3-1jammy.20221207.044559 [1,052 kB]
Get:39 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-behaviors amd64 1.1.3-1jammy.20221207.052114 [402 kB]
Get:40 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-bt-navigator amd64 1.1.3-1jammy.20221207.052119 [256 kB]
Get:41 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-collision-monitor amd64 1.1.3-1jammy.20221207.051848 [225 kB]
Get:42 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-constrained-smoother amd64 1.1.3-1jammy.20221207.052820 [61.5 kB]
Get:43 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-controller amd64 1.1.3-1jammy.20221207.052820 [302 kB]
Get:44 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-dwb-controller amd64 1.1.3-1jammy.20221207.064539 [5,150 B]
Get:45 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-navfn-planner amd64 1.1.3-1jammy.20221207.052820 [48.0 kB]
Get:46 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-planner amd64 1.1.3-1jammy.20221207.052822 [200 kB]
Get:47 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-regulated-pure-pursuit-controller amd64 1.1.3-1jammy.20221207.052822 [82.7 kB]
Get:48 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-rotation-shim-controller amd64 1.1.3-1jammy.20221207.053601 [104 kB]
Get:49 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-rviz-plugins amd64 1.1.3-1jammy.20221207.075748 [294 kB]
Get:50 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-simple-commander amd64 1.1.3-1jammy.20221207.041752 [30.6 kB]
Get:51 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-ompl amd64 1.5.2-1jammy.20221108.143845 [1,628 kB]
Get:52 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-smac-planner amd64 1.1.3-1jammy.20221207.052822 [449 kB]
Get:53 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-smoother amd64 1.1.3-1jammy.20221207.052824 [194 kB]
Get:54 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-theta-star-planner amd64 1.1.3-1jammy.20221207.052829 [41.3 kB]
Get:55 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-velocity-smoother amd64 1.1.3-1jammy.20221207.044624 [125 kB]
Get:56 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-waypoint-follower amd64 1.1.3-1jammy.20221207.052825 [358 kB]
Get:57 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-navigation2 amd64 1.1.3-1jammy.20221207.081347 [5,550 B]
Get:58 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-slam-toolbox amd64 2.6.3-1jammy.20221207.075748 [1,646 kB]
Get:59 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-nav2-bringup amd64 1.1.3-1jammy.20221207.081537 [22.1 kB]
Fetched 36.2 MB in 4min 47s (126 kB/s)
Extracting templates from packages: 100%
Selecting previously unselected package libsuitesparseconfig5:amd64.
(Reading database ... 182035 files and directories currently installed.)
Preparing to unpack .../00-libsuitesparseconfig5_1%3a5.10.1+dfsg-4build1_amd64.deb ...
Unpacking libsuitesparseconfig5:amd64 (1:5.10.1+dfsg-4build1) ...
Selecting previously unselected package libamd2:amd64.
Preparing to unpack .../01-libamd2_1%3a5.10.1+dfsg-4build1_amd64.deb ...
Unpacking libamd2:amd64 (1:5.10.1+dfsg-4build1) ...
Selecting previously unselected package libbtf1:amd64.
Preparing to unpack .../02-libbtf1_1%3a5.10.1+dfsg-4build1_amd64.deb ...
Unpacking libbtf1:amd64 (1:5.10.1+dfsg-4build1) ...
Selecting previously unselected package libcamd2:amd64.
Preparing to unpack .../03-libcamd2_1%3a5.10.1+dfsg-4build1_amd64.deb ...
Unpacking libcamd2:amd64 (1:5.10.1+dfsg-4build1) ...
Selecting previously unselected package libccolamd2:amd64.
Preparing to unpack .../04-libccolamd2_1%3a5.10.1+dfsg-4build1_amd64.deb ...
Unpacking libccolamd2:amd64 (1:5.10.1+dfsg-4build1) ...
Selecting previously unselected package libcolamd2:amd64.
Preparing to unpack .../05-libcolamd2_1%3a5.10.1+dfsg-4build1_amd64.deb ...
Unpacking libcolamd2:amd64 (1:5.10.1+dfsg-4build1) ...
Selecting previously unselected package libmetis5:amd64.
Preparing to unpack .../06-libmetis5_5.1.0.dfsg-7build2_amd64.deb ...
Unpacking libmetis5:amd64 (5.1.0.dfsg-7build2) ...
Selecting previously unselected package libcholmod3:amd64.
Preparing to unpack .../07-libcholmod3_1%3a5.10.1+dfsg-4build1_amd64.deb ...
Unpacking libcholmod3:amd64 (1:5.10.1+dfsg-4build1) ...
Selecting previously unselected package libcxsparse3:amd64.
Preparing to unpack .../08-libcxsparse3_1%3a5.10.1+dfsg-4build1_amd64.deb ...
Unpacking libcxsparse3:amd64 (1:5.10.1+dfsg-4build1) ...
Selecting previously unselected package libgoogle-glog0v5.
Preparing to unpack .../09-libgoogle-glog0v5_0.5.0+really0.4.0-2_amd64.deb ...
Unpacking libgoogle-glog0v5 (0.5.0+really0.4.0-2) ...
Selecting previously unselected package libspqr2:amd64.
Preparing to unpack .../10-libspqr2_1%3a5.10.1+dfsg-4build1_amd64.deb ...
Unpacking libspqr2:amd64 (1:5.10.1+dfsg-4build1) ...
Selecting previously unselected package libceres2.
Preparing to unpack .../11-libceres2_2.0.0+dfsg1-5_amd64.deb ...
Unpacking libceres2 (2.0.0+dfsg1-5) ...
Selecting previously unselected package libunwind-dev:amd64.
Preparing to unpack .../12-libunwind-dev_1.3.2-2build2_amd64.deb ...
Unpacking libunwind-dev:amd64 (1.3.2-2build2) ...
Selecting previously unselected package libgoogle-glog-dev.
Preparing to unpack .../13-libgoogle-glog-dev_0.5.0+really0.4.0-2_amd64.deb ...
Unpacking libgoogle-glog-dev (0.5.0+really0.4.0-2) ...
Selecting previously unselected package libklu1:amd64.
Preparing to unpack .../14-libklu1_1%3a5.10.1+dfsg-4build1_amd64.deb ...
Unpacking libklu1:amd64 (1:5.10.1+dfsg-4build1) ...
Selecting previously unselected package libldl2:amd64.
Preparing to unpack .../15-libldl2_1%3a5.10.1+dfsg-4build1_amd64.deb ...
Unpacking libldl2:amd64 (1:5.10.1+dfsg-4build1) ...
Selecting previously unselected package libmongoose2:amd64.
Preparing to unpack .../16-libmongoose2_1%3a5.10.1+dfsg-4build1_amd64.deb ...
Unpacking libmongoose2:amd64 (1:5.10.1+dfsg-4build1) ...
Selecting previously unselected package libumfpack5:amd64.
Preparing to unpack .../17-libumfpack5_1%3a5.10.1+dfsg-4build1_amd64.deb ...
Unpacking libumfpack5:amd64 (1:5.10.1+dfsg-4build1) ...
Selecting previously unselected package librbio2:amd64.
Preparing to unpack .../18-librbio2_1%3a5.10.1+dfsg-4build1_amd64.deb ...
Unpacking librbio2:amd64 (1:5.10.1+dfsg-4build1) ...
Selecting previously unselected package libsliplu1:amd64.
Preparing to unpack .../19-libsliplu1_1%3a5.10.1+dfsg-4build1_amd64.deb ...
Unpacking libsliplu1:amd64 (1:5.10.1+dfsg-4build1) ...
Selecting previously unselected package libsuitesparse-dev:amd64.
Preparing to unpack .../20-libsuitesparse-dev_1%3a5.10.1+dfsg-4build1_amd64.deb ...
Unpacking libsuitesparse-dev:amd64 (1:5.10.1+dfsg-4build1) ...
Selecting previously unselected package libceres-dev.
Preparing to unpack .../21-libceres-dev_2.0.0+dfsg1-5_amd64.deb ...
Unpacking libceres-dev (2.0.0+dfsg1-5) ...
Selecting previously unselected package libgraphblas6:amd64.
Preparing to unpack .../22-libgraphblas6_6.1.4+dfsg-2_amd64.deb ...
Unpacking libgraphblas6:amd64 (6.1.4+dfsg-2) ...
Selecting previously unselected package libgraphblas-dev:amd64.
Preparing to unpack .../23-libgraphblas-dev_6.1.4+dfsg-2_amd64.deb ...
Unpacking libgraphblas-dev:amd64 (6.1.4+dfsg-2) ...
Selecting previously unselected package nlohmann-json3-dev.
Preparing to unpack .../24-nlohmann-json3-dev_3.10.5-2_all.deb ...
Unpacking nlohmann-json3-dev (3.10.5-2) ...
Selecting previously unselected package ros-humble-behaviortree-cpp-v3.
Preparing to unpack .../25-ros-humble-behaviortree-cpp-v3_3.8.0-1jammy.20221202.022001_amd64.deb ...
Unpacking ros-humble-behaviortree-cpp-v3 (3.8.0-1jammy.20221202.022001) ...
Selecting previously unselected package ros-humble-nav2-voxel-grid.
Preparing to unpack .../26-ros-humble-nav2-voxel-grid_1.1.3-1jammy.20221207.041245_amd64.deb ...
Unpacking ros-humble-nav2-voxel-grid (1.1.3-1jammy.20221207.041245) ...
Selecting previously unselected package ros-humble-nav2-costmap-2d.
Preparing to unpack .../27-ros-humble-nav2-costmap-2d_1.1.3-1jammy.20221207.050306_amd64.deb ...
Unpacking ros-humble-nav2-costmap-2d (1.1.3-1jammy.20221207.050306) ...
Selecting previously unselected package ros-humble-costmap-queue.
Preparing to unpack .../28-ros-humble-costmap-queue_1.1.3-1jammy.20221207.063710_amd64.deb ...
Unpacking ros-humble-costmap-queue (1.1.3-1jammy.20221207.063710) ...
Selecting previously unselected package ros-humble-nav-2d-msgs.
Preparing to unpack .../29-ros-humble-nav-2d-msgs_1.1.3-1jammy.20221110.224153_amd64.deb ...
Unpacking ros-humble-nav-2d-msgs (1.1.3-1jammy.20221110.224153) ...
Selecting previously unselected package ros-humble-dwb-msgs.
Preparing to unpack .../30-ros-humble-dwb-msgs_1.1.3-1jammy.20221110.224320_amd64.deb ...
Unpacking ros-humble-dwb-msgs (1.1.3-1jammy.20221110.224320) ...
Selecting previously unselected package ros-humble-nav-2d-utils.
Preparing to unpack .../31-ros-humble-nav-2d-utils_1.1.3-1jammy.20221207.044652_amd64.deb ...
Unpacking ros-humble-nav-2d-utils (1.1.3-1jammy.20221207.044652) ...
Selecting previously unselected package ros-humble-nav2-core.
Preparing to unpack .../32-ros-humble-nav2-core_1.1.3-1jammy.20221207.051902_amd64.deb ...
Unpacking ros-humble-nav2-core (1.1.3-1jammy.20221207.051902) ...
Selecting previously unselected package ros-humble-dwb-core.
Preparing to unpack .../33-ros-humble-dwb-core_1.1.3-1jammy.20221207.052140_amd64.deb ...
Unpacking ros-humble-dwb-core (1.1.3-1jammy.20221207.052140) ...
Selecting previously unselected package ros-humble-dwb-critics.
Preparing to unpack .../34-ros-humble-dwb-critics_1.1.3-1jammy.20221207.063858_amd64.deb ...
Unpacking ros-humble-dwb-critics (1.1.3-1jammy.20221207.063858) ...
Selecting previously unselected package ros-humble-dwb-plugins.
Preparing to unpack .../35-ros-humble-dwb-plugins_1.1.3-1jammy.20221207.053319_amd64.deb ...
Unpacking ros-humble-dwb-plugins (1.1.3-1jammy.20221207.053319) ...
Selecting previously unselected package ros-humble-nav2-amcl.
Preparing to unpack .../36-ros-humble-nav2-amcl_1.1.3-1jammy.20221207.044549_amd64.deb ...
Unpacking ros-humble-nav2-amcl (1.1.3-1jammy.20221207.044549) ...
Selecting previously unselected package ros-humble-nav2-behavior-tree.
Preparing to unpack .../37-ros-humble-nav2-behavior-tree_1.1.3-1jammy.20221207.044559_amd64.deb ...
Unpacking ros-humble-nav2-behavior-tree (1.1.3-1jammy.20221207.044559) ...
Selecting previously unselected package ros-humble-nav2-behaviors.
Preparing to unpack .../38-ros-humble-nav2-behaviors_1.1.3-1jammy.20221207.052114_amd64.deb ...
Unpacking ros-humble-nav2-behaviors (1.1.3-1jammy.20221207.052114) ...
Selecting previously unselected package ros-humble-nav2-bt-navigator.
Preparing to unpack .../39-ros-humble-nav2-bt-navigator_1.1.3-1jammy.20221207.052119_amd64.deb ...
Unpacking ros-humble-nav2-bt-navigator (1.1.3-1jammy.20221207.052119) ...
Selecting previously unselected package ros-humble-nav2-collision-monitor.
Preparing to unpack .../40-ros-humble-nav2-collision-monitor_1.1.3-1jammy.20221207.051848_amd64.deb ...
Unpacking ros-humble-nav2-collision-monitor (1.1.3-1jammy.20221207.051848) ...
Selecting previously unselected package ros-humble-nav2-constrained-smoother.
Preparing to unpack .../41-ros-humble-nav2-constrained-smoother_1.1.3-1jammy.20221207.052820_amd64.deb ...
Unpacking ros-humble-nav2-constrained-smoother (1.1.3-1jammy.20221207.052820) ...
Selecting previously unselected package ros-humble-nav2-controller.
Preparing to unpack .../42-ros-humble-nav2-controller_1.1.3-1jammy.20221207.052820_amd64.deb ...
Unpacking ros-humble-nav2-controller (1.1.3-1jammy.20221207.052820) ...
Selecting previously unselected package ros-humble-nav2-dwb-controller.
Preparing to unpack .../43-ros-humble-nav2-dwb-controller_1.1.3-1jammy.20221207.064539_amd64.deb ...
Unpacking ros-humble-nav2-dwb-controller (1.1.3-1jammy.20221207.064539) ...
Selecting previously unselected package ros-humble-nav2-navfn-planner.
Preparing to unpack .../44-ros-humble-nav2-navfn-planner_1.1.3-1jammy.20221207.052820_amd64.deb ...
Unpacking ros-humble-nav2-navfn-planner (1.1.3-1jammy.20221207.052820) ...
Selecting previously unselected package ros-humble-nav2-planner.
Preparing to unpack .../45-ros-humble-nav2-planner_1.1.3-1jammy.20221207.052822_amd64.deb ...
Unpacking ros-humble-nav2-planner (1.1.3-1jammy.20221207.052822) ...
Selecting previously unselected package ros-humble-nav2-regulated-pure-pursuit-controller.
Preparing to unpack .../46-ros-humble-nav2-regulated-pure-pursuit-controller_1.1.3-1jammy.20221207.052822_amd64.deb ...
Unpacking ros-humble-nav2-regulated-pure-pursuit-controller (1.1.3-1jammy.20221207.052822) ...
Selecting previously unselected package ros-humble-nav2-rotation-shim-controller.
Preparing to unpack .../47-ros-humble-nav2-rotation-shim-controller_1.1.3-1jammy.20221207.053601_amd64.deb ...
Unpacking ros-humble-nav2-rotation-shim-controller (1.1.3-1jammy.20221207.053601) ...
Selecting previously unselected package ros-humble-nav2-rviz-plugins.
Preparing to unpack .../48-ros-humble-nav2-rviz-plugins_1.1.3-1jammy.20221207.075748_amd64.deb ...
Unpacking ros-humble-nav2-rviz-plugins (1.1.3-1jammy.20221207.075748) ...
Selecting previously unselected package ros-humble-nav2-simple-commander.
Preparing to unpack .../49-ros-humble-nav2-simple-commander_1.1.3-1jammy.20221207.041752_amd64.deb ...
Unpacking ros-humble-nav2-simple-commander (1.1.3-1jammy.20221207.041752) ...
Selecting previously unselected package ros-humble-ompl.
Preparing to unpack .../50-ros-humble-ompl_1.5.2-1jammy.20221108.143845_amd64.deb ...
Unpacking ros-humble-ompl (1.5.2-1jammy.20221108.143845) ...
Selecting previously unselected package ros-humble-nav2-smac-planner.
Preparing to unpack .../51-ros-humble-nav2-smac-planner_1.1.3-1jammy.20221207.052822_amd64.deb ...
Unpacking ros-humble-nav2-smac-planner (1.1.3-1jammy.20221207.052822) ...
Selecting previously unselected package ros-humble-nav2-smoother.
Preparing to unpack .../52-ros-humble-nav2-smoother_1.1.3-1jammy.20221207.052824_amd64.deb ...
Unpacking ros-humble-nav2-smoother (1.1.3-1jammy.20221207.052824) ...
Selecting previously unselected package ros-humble-nav2-theta-star-planner.
Preparing to unpack .../53-ros-humble-nav2-theta-star-planner_1.1.3-1jammy.20221207.052829_amd64.deb ...
Unpacking ros-humble-nav2-theta-star-planner (1.1.3-1jammy.20221207.052829) ...
Selecting previously unselected package ros-humble-nav2-velocity-smoother.
Preparing to unpack .../54-ros-humble-nav2-velocity-smoother_1.1.3-1jammy.20221207.044624_amd64.deb ...
Unpacking ros-humble-nav2-velocity-smoother (1.1.3-1jammy.20221207.044624) ...
Selecting previously unselected package ros-humble-nav2-waypoint-follower.
Preparing to unpack .../55-ros-humble-nav2-waypoint-follower_1.1.3-1jammy.20221207.052825_amd64.deb ...
Unpacking ros-humble-nav2-waypoint-follower (1.1.3-1jammy.20221207.052825) ...
Selecting previously unselected package ros-humble-navigation2.
Preparing to unpack .../56-ros-humble-navigation2_1.1.3-1jammy.20221207.081347_amd64.deb ...
Unpacking ros-humble-navigation2 (1.1.3-1jammy.20221207.081347) ...
Selecting previously unselected package ros-humble-slam-toolbox.
Preparing to unpack .../57-ros-humble-slam-toolbox_2.6.3-1jammy.20221207.075748_amd64.deb ...
Unpacking ros-humble-slam-toolbox (2.6.3-1jammy.20221207.075748) ...
Selecting previously unselected package ros-humble-nav2-bringup.
Preparing to unpack .../58-ros-humble-nav2-bringup_1.1.3-1jammy.20221207.081537_amd64.deb ...
Unpacking ros-humble-nav2-bringup (1.1.3-1jammy.20221207.081537) ...
Setting up ros-humble-nav2-velocity-smoother (1.1.3-1jammy.20221207.044624) ...
Setting up libunwind-dev:amd64 (1.3.2-2build2) ...
Setting up ros-humble-nav2-simple-commander (1.1.3-1jammy.20221207.041752) ...
Setting up libgraphblas6:amd64 (6.1.4+dfsg-2) ...
Setting up ros-humble-nav2-voxel-grid (1.1.3-1jammy.20221207.041245) ...
Setting up libldl2:amd64 (1:5.10.1+dfsg-4build1) ...
Setting up ros-humble-nav2-amcl (1.1.3-1jammy.20221207.044549) ...
Setting up libmetis5:amd64 (5.1.0.dfsg-7build2) ...
Setting up libbtf1:amd64 (1:5.10.1+dfsg-4build1) ...
Setting up ros-humble-behaviortree-cpp-v3 (3.8.0-1jammy.20221202.022001) ...
Setting up libgraphblas-dev:amd64 (6.1.4+dfsg-2) ...
Setting up ros-humble-nav2-costmap-2d (1.1.3-1jammy.20221207.050306) ...
Setting up ros-humble-costmap-queue (1.1.3-1jammy.20221207.063710) ...
Setting up ros-humble-nav-2d-msgs (1.1.3-1jammy.20221110.224153) ...
Setting up ros-humble-nav2-rviz-plugins (1.1.3-1jammy.20221207.075748) ...
Setting up ros-humble-ompl (1.5.2-1jammy.20221108.143845) ...
Setting up libcxsparse3:amd64 (1:5.10.1+dfsg-4build1) ...
Setting up nlohmann-json3-dev (3.10.5-2) ...
Setting up ros-humble-nav-2d-utils (1.1.3-1jammy.20221207.044652) ...
Setting up ros-humble-nav2-collision-monitor (1.1.3-1jammy.20221207.051848) ...
Setting up libgoogle-glog0v5 (0.5.0+really0.4.0-2) ...
Setting up libsuitesparseconfig5:amd64 (1:5.10.1+dfsg-4build1) ...
Setting up librbio2:amd64 (1:5.10.1+dfsg-4build1) ...
Setting up ros-humble-nav2-core (1.1.3-1jammy.20221207.051902) ...
Setting up libamd2:amd64 (1:5.10.1+dfsg-4build1) ...
Setting up libcolamd2:amd64 (1:5.10.1+dfsg-4build1) ...
Setting up ros-humble-nav2-theta-star-planner (1.1.3-1jammy.20221207.052829) ...
Setting up ros-humble-nav2-smac-planner (1.1.3-1jammy.20221207.052822) ...
Setting up ros-humble-nav2-behavior-tree (1.1.3-1jammy.20221207.044559) ...
Setting up ros-humble-nav2-planner (1.1.3-1jammy.20221207.052822) ...
Setting up ros-humble-nav2-bt-navigator (1.1.3-1jammy.20221207.052119) ...
Setting up ros-humble-nav2-regulated-pure-pursuit-controller (1.1.3-1jammy.20221207.052822) ...
Setting up ros-humble-nav2-controller (1.1.3-1jammy.20221207.052820) ...
Setting up ros-humble-nav2-smoother (1.1.3-1jammy.20221207.052824) ...
Setting up libsliplu1:amd64 (1:5.10.1+dfsg-4build1) ...
Setting up libcamd2:amd64 (1:5.10.1+dfsg-4build1) ...
Setting up libmongoose2:amd64 (1:5.10.1+dfsg-4build1) ...
Setting up ros-humble-dwb-msgs (1.1.3-1jammy.20221110.224320) ...
Setting up ros-humble-nav2-behaviors (1.1.3-1jammy.20221207.052114) ...
Setting up ros-humble-nav2-waypoint-follower (1.1.3-1jammy.20221207.052825) ...
Setting up libklu1:amd64 (1:5.10.1+dfsg-4build1) ...
Setting up libccolamd2:amd64 (1:5.10.1+dfsg-4build1) ...
Setting up libgoogle-glog-dev (0.5.0+really0.4.0-2) ...
Setting up ros-humble-nav2-navfn-planner (1.1.3-1jammy.20221207.052820) ...
Setting up ros-humble-nav2-rotation-shim-controller (1.1.3-1jammy.20221207.053601) ...
Setting up libcholmod3:amd64 (1:5.10.1+dfsg-4build1) ...
Setting up libspqr2:amd64 (1:5.10.1+dfsg-4build1) ...
Setting up ros-humble-dwb-core (1.1.3-1jammy.20221207.052140) ...
Setting up ros-humble-dwb-critics (1.1.3-1jammy.20221207.063858) ...
Setting up libumfpack5:amd64 (1:5.10.1+dfsg-4build1) ...
Setting up libceres2 (2.0.0+dfsg1-5) ...
Setting up ros-humble-dwb-plugins (1.1.3-1jammy.20221207.053319) ...
Setting up libsuitesparse-dev:amd64 (1:5.10.1+dfsg-4build1) ...
Setting up ros-humble-nav2-dwb-controller (1.1.3-1jammy.20221207.064539) ...
Setting up libceres-dev (2.0.0+dfsg1-5) ...
Setting up ros-humble-nav2-constrained-smoother (1.1.3-1jammy.20221207.052820) ...
Setting up ros-humble-slam-toolbox (2.6.3-1jammy.20221207.075748) ...
Setting up ros-humble-navigation2 (1.1.3-1jammy.20221207.081347) ...
Setting up ros-humble-nav2-bringup (1.1.3-1jammy.20221207.081537) ...
Processing triggers for man-db (2.10.2-1) ...
Processing triggers for libc-bin (2.35-0ubuntu3.1) ...
Scanning processes...
Scanning processor microcode...
Scanning linux images...
Failed to retrieve available kernel versions.
Failed to check for processor microcode upgrades.
No services need to be restarted.
No containers need to be restarted.
No user sessions are running outdated binaries.
No VM guests are running outdated hypervisor (qemu) binaries on this host.
executing command [sudo -H apt-get install -y ros-humble-joint-trajectory-controller]
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
The following additional packages will be installed:
ros-humble-control-toolbox
The following NEW packages will be installed:
ros-humble-control-toolbox ros-humble-joint-trajectory-controller
0 upgraded, 2 newly installed, 0 to remove and 0 not upgraded.
Need to get 280 kB of archives.
After this operation, 1,170 kB of additional disk space will be used.
Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-control-toolbox amd64 2.1.2-1jammy.20221202.025253 [65.8 kB]
Get:2 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-joint-trajectory-controller amd64 2.15.0-1jammy.20221207.061745 [214 kB]
Fetched 280 kB in 31s (9,026 B/s)
Selecting previously unselected package ros-humble-control-toolbox.
(Reading database ... 185343 files and directories currently installed.)
Preparing to unpack .../ros-humble-control-toolbox_2.1.2-1jammy.20221202.025253_amd64.deb ...
Unpacking ros-humble-control-toolbox (2.1.2-1jammy.20221202.025253) ...
Selecting previously unselected package ros-humble-joint-trajectory-controller.
Preparing to unpack .../ros-humble-joint-trajectory-controller_2.15.0-1jammy.20221207.061745_amd64.deb ...
Unpacking ros-humble-joint-trajectory-controller (2.15.0-1jammy.20221207.061745) ...
Setting up ros-humble-control-toolbox (2.1.2-1jammy.20221202.025253) ...
Setting up ros-humble-joint-trajectory-controller (2.15.0-1jammy.20221207.061745) ...
Scanning processes...
Scanning processor microcode...
Scanning linux images...
Failed to retrieve available kernel versions.
Failed to check for processor microcode upgrades.
No services need to be restarted.
No containers need to be restarted.
No user sessions are running outdated binaries.
No VM guests are running outdated hypervisor (qemu) binaries on this host.
executing command [sudo -H apt-get install -y ros-humble-launch-param-builder]
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
The following NEW packages will be installed:
ros-humble-launch-param-builder
0 upgraded, 1 newly installed, 0 to remove and 0 not upgraded.
Need to get 8,308 B of archives.
After this operation, 64.5 kB of additional disk space will be used.
Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-launch-param-builder amd64 0.1.1-1jammy.20221207.031000 [8,308 B]
Fetched 8,308 B in 3s (2,613 B/s)
Selecting previously unselected package ros-humble-launch-param-builder.
(Reading database ... 185418 files and directories currently installed.)
Preparing to unpack .../ros-humble-launch-param-builder_0.1.1-1jammy.20221207.031000_amd64.deb ...
Unpacking ros-humble-launch-param-builder (0.1.1-1jammy.20221207.031000) ...
Setting up ros-humble-launch-param-builder (0.1.1-1jammy.20221207.031000) ...
Scanning processes...
Scanning processor microcode...
Scanning linux images...
Failed to retrieve available kernel versions.
Failed to check for processor microcode upgrades.
No services need to be restarted.
No containers need to be restarted.
No user sessions are running outdated binaries.
No VM guests are running outdated hypervisor (qemu) binaries on this host.
executing command [sudo -H apt-get install -y ros-humble-position-controllers]
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
The following additional packages will be installed:
ros-humble-forward-command-controller
The following NEW packages will be installed:
ros-humble-forward-command-controller ros-humble-position-controllers
0 upgraded, 2 newly installed, 0 to remove and 0 not upgraded.
Need to get 140 kB of archives.
After this operation, 687 kB of additional disk space will be used.
Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-forward-command-controller amd64 2.15.0-1jammy.20221207.061802 [120 kB]
Get:2 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-position-controllers amd64 2.15.0-1jammy.20221207.062351 [19.6 kB]
Fetched 140 kB in 5s (26.2 kB/s)
Selecting previously unselected package ros-humble-forward-command-controller.
(Reading database ... 185450 files and directories currently installed.)
Preparing to unpack .../ros-humble-forward-command-controller_2.15.0-1jammy.20221207.061802_amd64.deb ...
Unpacking ros-humble-forward-command-controller (2.15.0-1jammy.20221207.061802) ...
Selecting previously unselected package ros-humble-position-controllers.
Preparing to unpack .../ros-humble-position-controllers_2.15.0-1jammy.20221207.062351_amd64.deb ...
Unpacking ros-humble-position-controllers (2.15.0-1jammy.20221207.062351) ...
Setting up ros-humble-forward-command-controller (2.15.0-1jammy.20221207.061802) ...
Setting up ros-humble-position-controllers (2.15.0-1jammy.20221207.062351) ...
Scanning processes...
Scanning processor microcode...
Scanning linux images...
Failed to retrieve available kernel versions.
Failed to check for processor microcode upgrades.
No services need to be restarted.
No containers need to be restarted.
No user sessions are running outdated binaries.
No VM guests are running outdated hypervisor (qemu) binaries on this host.
executing command [sudo -H apt-get install -y ros-humble-behaviortree-cpp-v3]
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
ros-humble-behaviortree-cpp-v3 is already the newest version (3.8.0-1jammy.20221202.022001).
ros-humble-behaviortree-cpp-v3 set to manually installed.
0 upgraded, 0 newly installed, 0 to remove and 0 not upgraded.
executing command [sudo -H apt-get install -y libqt5svg5-dev]
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
The following NEW packages will be installed:
libqt5svg5-dev
0 upgraded, 1 newly installed, 0 to remove and 0 not upgraded.
Need to get 11.1 kB of archives.
After this operation, 79.9 kB of additional disk space will be used.
Get:1 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libqt5svg5-dev amd64 5.15.3-1 [11.1 kB]
Fetched 11.1 kB in 0s (24.4 kB/s)
Selecting previously unselected package libqt5svg5-dev:amd64.
(Reading database ... 185521 files and directories currently installed.)
Preparing to unpack .../libqt5svg5-dev_5.15.3-1_amd64.deb ...
Unpacking libqt5svg5-dev:amd64 (5.15.3-1) ...
Setting up libqt5svg5-dev:amd64 (5.15.3-1) ...
Scanning processes...
Scanning processor microcode...
Scanning linux images...
Failed to retrieve available kernel versions.
Failed to check for processor microcode upgrades.
No services need to be restarted.
No containers need to be restarted.
No user sessions are running outdated binaries.
No VM guests are running outdated hypervisor (qemu) binaries on this host.
executing command [sudo -H apt-get install -y ros-humble-vision-msgs]
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
The following NEW packages will be installed:
ros-humble-vision-msgs
0 upgraded, 1 newly installed, 0 to remove and 0 not upgraded.
Need to get 135 kB of archives.
After this operation, 1,881 kB of additional disk space will be used.
Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-vision-msgs amd64 4.0.0-2jammy.20221108.172753 [135 kB]
Fetched 135 kB in 9s (15.7 kB/s)
Selecting previously unselected package ros-humble-vision-msgs.
(Reading database ... 185547 files and directories currently installed.)
Preparing to unpack .../ros-humble-vision-msgs_4.0.0-2jammy.20221108.172753_amd64.deb ...
Unpacking ros-humble-vision-msgs (4.0.0-2jammy.20221108.172753) ...
Setting up ros-humble-vision-msgs (4.0.0-2jammy.20221108.172753) ...
Processing triggers for libc-bin (2.35-0ubuntu3.1) ...
Scanning processes...
Scanning processor microcode...
Scanning linux images...
Failed to retrieve available kernel versions.
Failed to check for processor microcode upgrades.
No services need to be restarted.
No containers need to be restarted.
No user sessions are running outdated binaries.
No VM guests are running outdated hypervisor (qemu) binaries on this host.
executing command [sudo -H apt-get install -y ros-humble-control-msgs]
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
ros-humble-control-msgs is already the newest version (4.1.0-1jammy.20221108.173042).
ros-humble-control-msgs set to manually installed.
0 upgraded, 0 newly installed, 0 to remove and 0 not upgraded.
executing command [sudo -H apt-get install -y ros-humble-joint-state-publisher-gui]
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
The following NEW packages will be installed:
ros-humble-joint-state-publisher-gui
0 upgraded, 1 newly installed, 0 to remove and 0 not upgraded.
Need to get 15.5 kB of archives.
After this operation, 66.6 kB of additional disk space will be used.
Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-joint-state-publisher-gui amd64 2.3.0-1jammy.20221207.043424 [15.5 kB]
Fetched 15.5 kB in 4s (3,742 B/s)
Selecting previously unselected package ros-humble-joint-state-publisher-gui.
(Reading database ... 185898 files and directories currently installed.)
Preparing to unpack .../ros-humble-joint-state-publisher-gui_2.3.0-1jammy.20221207.043424_amd64.deb ...
Unpacking ros-humble-joint-state-publisher-gui (2.3.0-1jammy.20221207.043424) ...
Setting up ros-humble-joint-state-publisher-gui (2.3.0-1jammy.20221207.043424) ...
Scanning processes...
Scanning processor microcode...
Scanning linux images...
Failed to retrieve available kernel versions.
Failed to check for processor microcode upgrades.
No services need to be restarted.
No containers need to be restarted.
No user sessions are running outdated binaries.
No VM guests are running outdated hypervisor (qemu) binaries on this host.
executing command [sudo -H apt-get install -y ros-humble-moveit-configs-utils]
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
The following NEW packages will be installed:
ros-humble-moveit-configs-utils
0 upgraded, 1 newly installed, 0 to remove and 0 not upgraded.
Need to get 20.6 kB of archives.
After this operation, 105 kB of additional disk space will be used.
Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-moveit-configs-utils amd64 2.5.4-1jammy.20221207.043730 [20.6 kB]
Fetched 20.6 kB in 3s (6,650 B/s)
Selecting previously unselected package ros-humble-moveit-configs-utils.
(Reading database ... 185921 files and directories currently installed.)
Preparing to unpack .../ros-humble-moveit-configs-utils_2.5.4-1jammy.20221207.043730_amd64.deb ...
Unpacking ros-humble-moveit-configs-utils (2.5.4-1jammy.20221207.043730) ...
Setting up ros-humble-moveit-configs-utils (2.5.4-1jammy.20221207.043730) ...
Scanning processes...
Scanning processor microcode...
Scanning linux images...
Failed to retrieve available kernel versions.
Failed to check for processor microcode upgrades.
No services need to be restarted.
No containers need to be restarted.
No user sessions are running outdated binaries.
No VM guests are running outdated hypervisor (qemu) binaries on this host.
executing command [sudo -H apt-get install -y ros-humble-moveit-ros-control-interface]
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
The following additional packages will be installed:
ros-humble-moveit-simple-controller-manager
The following NEW packages will be installed:
ros-humble-moveit-ros-control-interface
ros-humble-moveit-simple-controller-manager
0 upgraded, 2 newly installed, 0 to remove and 0 not upgraded.
Need to get 291 kB of archives.
After this operation, 1,153 kB of additional disk space will be used.
Get:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-moveit-simple-controller-manager amd64 2.5.4-1jammy.20221207.065321 [98.3 kB]
Get:2 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-moveit-ros-control-interface amd64 2.5.4-1jammy.20221207.065645 [193 kB]
Fetched 291 kB in 17s (16.9 kB/s)
Selecting previously unselected package ros-humble-moveit-simple-controller-manager.
(Reading database ... 185949 files and directories currently installed.)
Preparing to unpack .../ros-humble-moveit-simple-controller-manager_2.5.4-1jammy.20221207.065321_amd64.deb ...
Unpacking ros-humble-moveit-simple-controller-manager (2.5.4-1jammy.20221207.065321) ...
Selecting previously unselected package ros-humble-moveit-ros-control-interface.
Preparing to unpack .../ros-humble-moveit-ros-control-interface_2.5.4-1jammy.20221207.065645_amd64.deb ...
Unpacking ros-humble-moveit-ros-control-interface (2.5.4-1jammy.20221207.065645) ...
Setting up ros-humble-moveit-simple-controller-manager (2.5.4-1jammy.20221207.065321) ...
Setting up ros-humble-moveit-ros-control-interface (2.5.4-1jammy.20221207.065645) ...
Processing triggers for libc-bin (2.35-0ubuntu3.1) ...
Scanning processes...
Scanning processor microcode...
Scanning linux images...
Failed to retrieve available kernel versions.
Failed to check for processor microcode upgrades.
No services need to be restarted.
No containers need to be restarted.
No user sessions are running outdated binaries.
No VM guests are running outdated hypervisor (qemu) binaries on this host.
executing command [sudo -H apt-get install -y ros-humble-moveit-planners-ompl]
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
The following additional packages will be installed:
libomp-14-dev libomp-dev libomp5-14
Suggested packages:
libomp-14-doc
The following NEW packages will be installed:
libomp-14-dev libomp-dev libomp5-14 ros-humble-moveit-planners-ompl
0 upgraded, 4 newly installed, 0 to remove and 0 not upgraded.
Need to get 1,059 kB of archives.
After this operation, 10.4 MB of additional disk space will be used.
Get:1 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libomp5-14 amd64 1:14.0.0-1ubuntu1 [388 kB]
Get:2 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-moveit-planners-ompl amd64 2.5.4-1jammy.20221207.072823 [321 kB]
Get:3 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libomp-14-dev amd64 1:14.0.0-1ubuntu1 [347 kB]
Get:4 http://mirrors.aliyun.com/ubuntu jammy/universe amd64 libomp-dev amd64 1:14.0-55~exp2 [3,074 B]
Fetched 1,059 kB in 23s (45.7 kB/s)
Selecting previously unselected package libomp5-14:amd64.
(Reading database ... 186029 files and directories currently installed.)
Preparing to unpack .../libomp5-14_1%3a14.0.0-1ubuntu1_amd64.deb ...
Unpacking libomp5-14:amd64 (1:14.0.0-1ubuntu1) ...
Selecting previously unselected package libomp-14-dev.
Preparing to unpack .../libomp-14-dev_1%3a14.0.0-1ubuntu1_amd64.deb ...
Unpacking libomp-14-dev (1:14.0.0-1ubuntu1) ...
Selecting previously unselected package libomp-dev:amd64.
Preparing to unpack .../libomp-dev_1%3a14.0-55~exp2_amd64.deb ...
Unpacking libomp-dev:amd64 (1:14.0-55~exp2) ...
Selecting previously unselected package ros-humble-moveit-planners-ompl.
Preparing to unpack .../ros-humble-moveit-planners-ompl_2.5.4-1jammy.20221207.072823_amd64.deb ...
Unpacking ros-humble-moveit-planners-ompl (2.5.4-1jammy.20221207.072823) ...
Setting up libomp5-14:amd64 (1:14.0.0-1ubuntu1) ...
Setting up libomp-14-dev (1:14.0.0-1ubuntu1) ...
Setting up libomp-dev:amd64 (1:14.0-55~exp2) ...
Setting up ros-humble-moveit-planners-ompl (2.5.4-1jammy.20221207.072823) ...
Processing triggers for libc-bin (2.35-0ubuntu3.1) ...
Scanning processes...
Scanning processor microcode...
Scanning linux images...
Failed to retrieve available kernel versions.
Failed to check for processor microcode upgrades.
No services need to be restarted.
No containers need to be restarted.
No user sessions are running outdated binaries.
No VM guests are running outdated hypervisor (qemu) binaries on this host.
#All required rosdeps installed successfully编译功能包: colcon build --symlink-install
记录如下
Finished
依据书中流程,通常不会遇到任何问题。
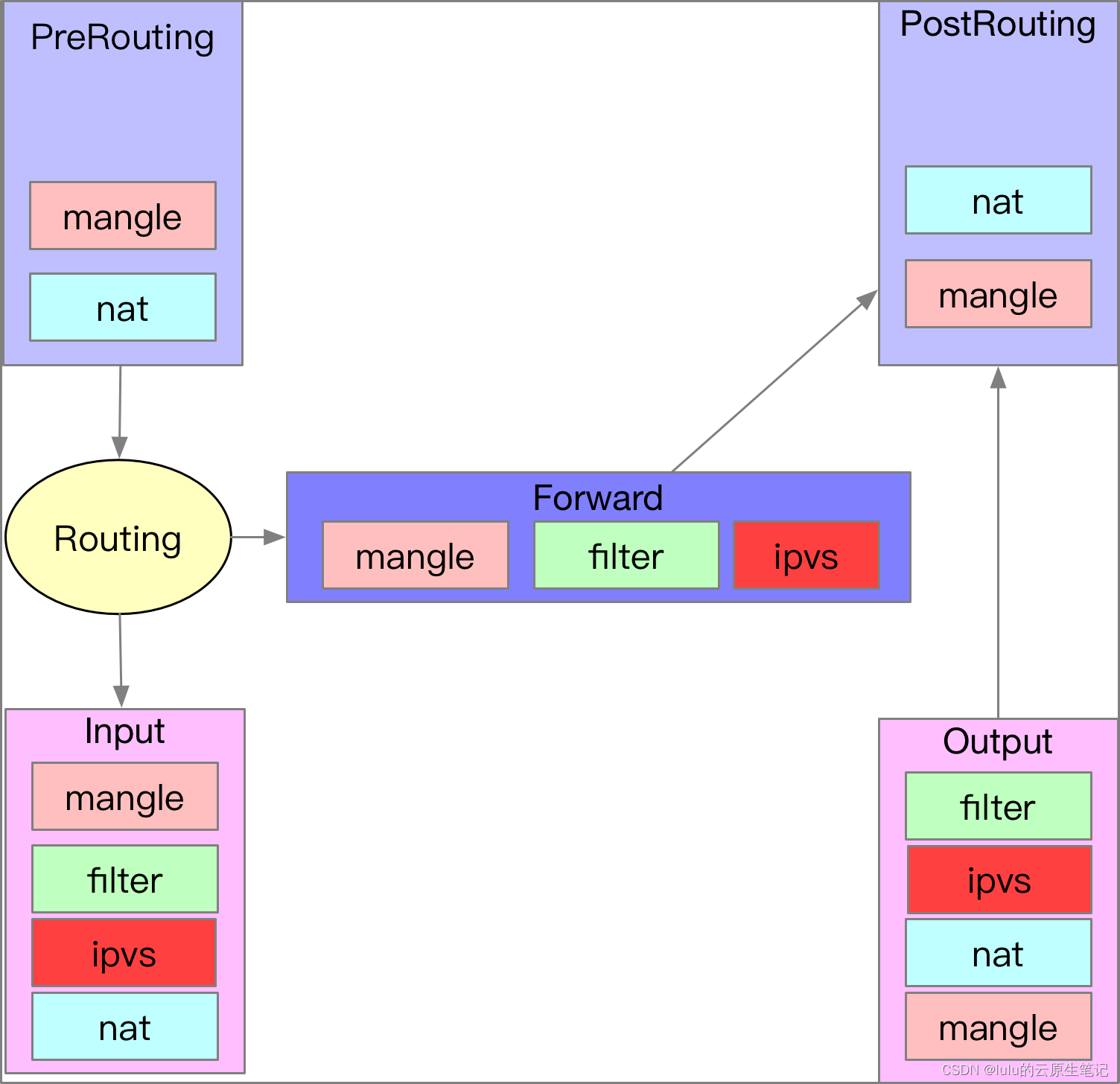
ROS2分层设计如下:
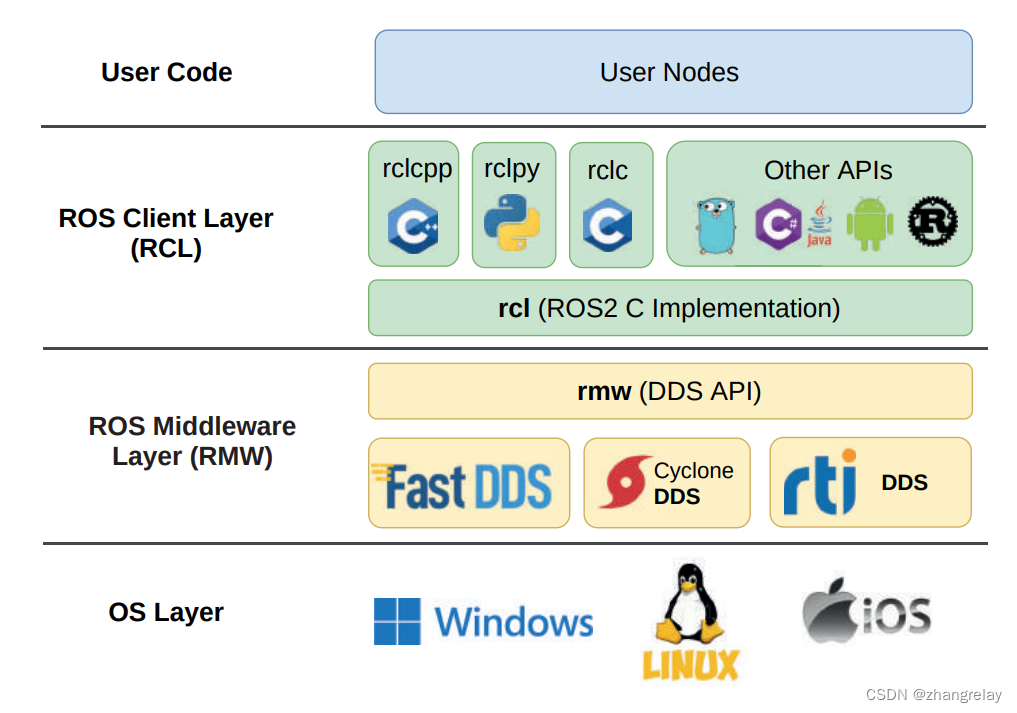
书内容简洁流畅。


![[Python+Django]Web学生信息管理系统数据库设计及系统实现](https://img-blog.csdnimg.cn/b215a17c6c594ff98baac085dc3ba12a.png)

![[激光原理与应用-63]:激光器-光学-探测光、泵浦光和种子光三种光的区别](https://img-blog.csdnimg.cn/img_convert/c4dfd2c7cbbee4df88d949be656ed4d3.png)