角点检测
执行角点检测并在可能的角点周围画一个圆
对图像中的角点位置进行检测和细化
Shi-Tomasi方法检测图像角点
1. cornerDetector_Demo.cpp 角点检测
/**
* @function cornerDetector_Demo.cpp
* @brief Demo code for detecting corners using OpenCV built-in functions
* 使用 OpenCV 内置函数进行角点检测的示例代码
* @author OpenCV team
*/
#include "opencv2/highgui.hpp" // 包含OpenCV图形界面高级操作的头文件
#include "opencv2/imgproc.hpp" // 包含OpenCV图像处理的头文件
#include <iostream> // 包含标准输入输出流的头文件
using namespace cv; // 使用cv命名空间
using namespace std; // 使用std命名空间
/// 全局变量定义
Mat src, src_gray; // 原图和转换为灰度图的图像
Mat myHarris_dst, myHarris_copy, Mc; // Harris算法结果、副本和M矩阵
Mat myShiTomasi_dst, myShiTomasi_copy; // Shi-Tomasi算法结果和副本
int myShiTomasi_qualityLevel = 50; // Shi-Tomasi算法质量等级
int myHarris_qualityLevel = 50; // Harris算法质量等级
int max_qualityLevel = 100; // 最大质量等级
double myHarris_minVal, myHarris_maxVal; // Harris算法最小和最大值
double myShiTomasi_minVal, myShiTomasi_maxVal; // Shi-Tomasi算法最小和最大值
RNG rng(12345); // 随机数生成器,用于产生颜色
const char* myHarris_window = "My Harris corner detector"; // Harris检测器窗口名称
const char* myShiTomasi_window = "My Shi Tomasi corner detector"; // Shi-Tomasi检测器窗口名称
/// 函数头定义
void myShiTomasi_function( int, void* ); // Shi-Tomasi算法函数
void myHarris_function( int, void* ); // Harris算法函数
/**
* @function main
*/
int main( int argc, char** argv )
{
/// 加载源图像并将其转换为灰度图
CommandLineParser parser( argc, argv, "{@input | building.jpg | input image}" );
src = imread( samples::findFile( parser.get<String>( "@input" ) ) );
if ( src.empty() )
{
cout << "Could not open or find the image!\n" << endl;
cout << "Usage: " << argv[0] << " <Input image>" << endl;
return -1;
}
cvtColor( src, src_gray, COLOR_BGR2GRAY );
/// 设置一些参数
int blockSize = 3, apertureSize = 3; // 定义Harris矩阵和Shi-Tomasi矩阵的块大小和孔径大小
/// 使用cornerEigenValsAndVecs计算Harris矩阵
cornerEigenValsAndVecs( src_gray, myHarris_dst, blockSize, apertureSize );
/* 计算 Harris 响应函数Mc */
Mc = Mat( src_gray.size(), CV_32FC1 ); // 初始化Mc矩阵,大小与灰度图一致
for( int i = 0; i < src_gray.rows; i++ ) // 遍历图像的每一行
{
for( int j = 0; j < src_gray.cols; j++ ) // 遍历图像的每一列
{
float lambda_1 = myHarris_dst.at<Vec6f>(i, j)[0]; // 获取第一个特征值lambda_1
float lambda_2 = myHarris_dst.at<Vec6f>(i, j)[1]; // 获取第二个特征值lambda_2
Mc.at<float>(i, j) = lambda_1*lambda_2 - 0.04f * ((lambda_1 + lambda_2) * (lambda_1 + lambda_2)); // 计算Mc中每个像素的Harris响应值
}
}
minMaxLoc( Mc, &myHarris_minVal, &myHarris_maxVal ); // 寻找Mc中的最小值和最大值
/* 创建窗口和滑动条 */
namedWindow( myHarris_window ); // 创建一个名为"My Harris corner detector"的窗口
createTrackbar( "Quality Level:", myHarris_window, &myHarris_qualityLevel, max_qualityLevel, myHarris_function ); // 创建一个滑动条以调整Harris检测器的质量等级
myHarris_function( 0, 0 ); // 调用Harris检测器函数
/// 使用cornerMinEigenVal计算Shi-Tomasi矩阵
cornerMinEigenVal( src_gray, myShiTomasi_dst, blockSize, apertureSize ); // 直接计算灰度图的Shi-Tomasi响应值
minMaxLoc( myShiTomasi_dst, &myShiTomasi_minVal, &myShiTomasi_maxVal ); // 寻找Shi-Tomasi响应值矩阵中的最小值和最大值
/* 创建窗口和滑动条 */
namedWindow( myShiTomasi_window ); // 创建一个名为"My Shi Tomasi corner detector"的窗口
createTrackbar( "Quality Level:", myShiTomasi_window, &myShiTomasi_qualityLevel, max_qualityLevel, myShiTomasi_function ); // 创建一个滑动条以调整Shi-Tomasi检测器的质量等级
myShiTomasi_function( 0, 0 ); // 调用Shi-Tomasi检测器函数
waitKey();
return 0;
}
/**
* @function myShiTomasi_function
*/
void myShiTomasi_function( int, void* )
{
myShiTomasi_copy = src.clone(); // 克隆原图用于绘制
myShiTomasi_qualityLevel = MAX(myShiTomasi_qualityLevel, 1); // 确保质量等级至少为1
// 遍历图像每个像素
for( int i = 0; i < src_gray.rows; i++ )
{
for( int j = 0; j < src_gray.cols; j++ )
{
// 依据质量等级,判断并绘制角点
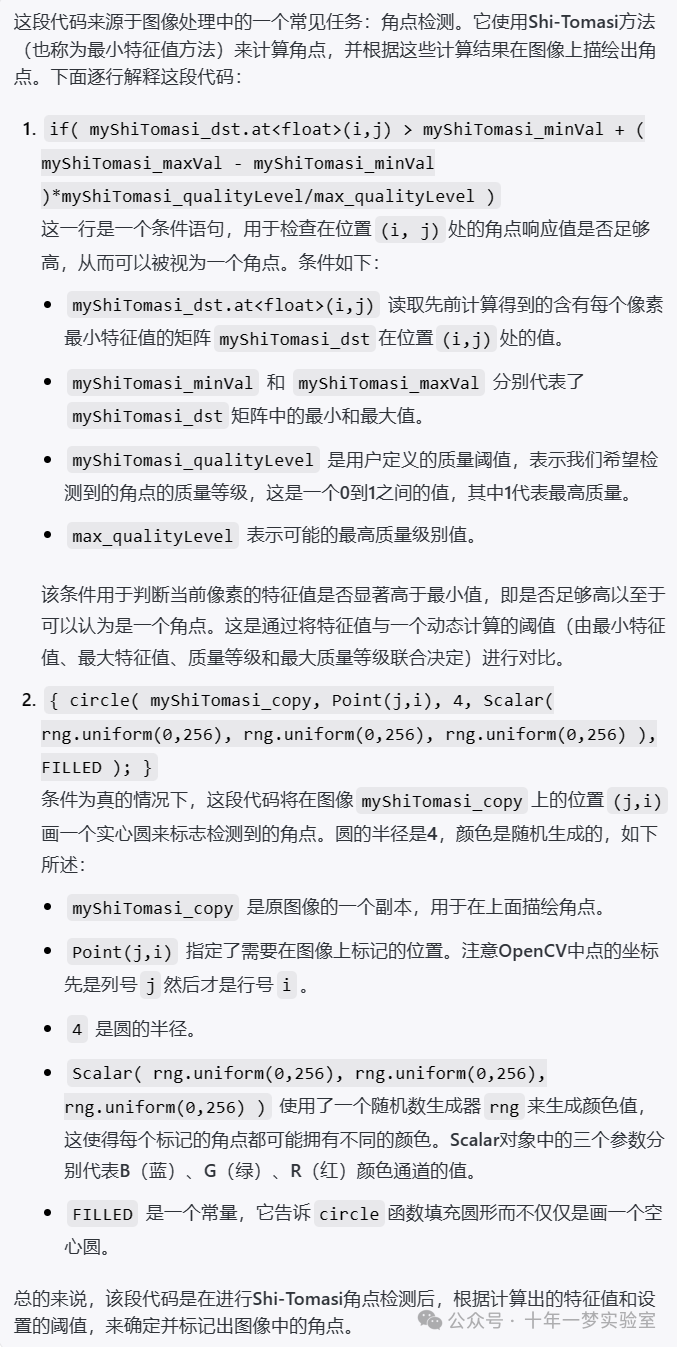
if( myShiTomasi_dst.at<float>(i,j) > myShiTomasi_minVal + ( myShiTomasi_maxVal - myShiTomasi_minVal )*myShiTomasi_qualityLevel/max_qualityLevel )
{
circle( myShiTomasi_copy, Point(j,i), 4, Scalar( rng.uniform(0,256), rng.uniform(0,256), rng.uniform(0,256) ), FILLED );
}
}
}
imshow( myShiTomasi_window, myShiTomasi_copy ); // 显示结果
}
/**
* @function myHarris_function
*/
void myHarris_function( int, void* )
{
myHarris_copy = src.clone(); // 克隆原图用于绘制
myHarris_qualityLevel = MAX(myHarris_qualityLevel, 1); // 确保质量等级至少为1
// 遍历图像每个像素
for( int i = 0; i < src_gray.rows; i++ )
{
for( int j = 0; j < src_gray.cols; j++ )
{
// 依据质量等级,判断并绘制角点
if( Mc.at<float>(i,j) > myHarris_minVal + ( myHarris_maxVal - myHarris_minVal )*myHarris_qualityLevel/max_qualityLevel )
{
circle( myHarris_copy, Point(j,i), 4, Scalar( rng.uniform(0,256), rng.uniform(0,256), rng.uniform(0,256) ), FILLED );
}
}
}
imshow( myHarris_window, myHarris_copy ); // 显示结果
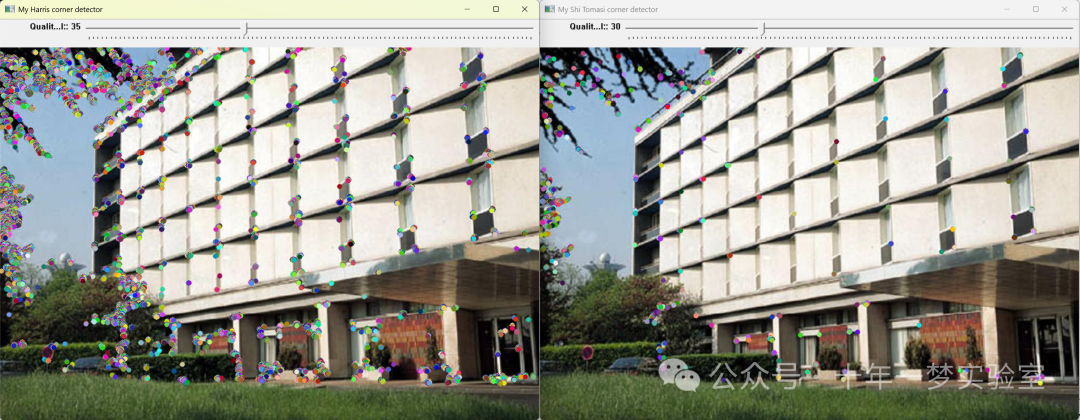
}这段代码是一个用于检测图像中角点的完整示例程序,使用了OpenCV库。它实现了两种角点检测方法:Harris角点检测和Shi-Tomasi角点检测。代码首先读取图像,然后将其转换为灰度图以进行处理。接下来分别计算两种方法的角点响应函数,并创建滑动条以调整检测角点的质量等级。通过滑动条调整后,程序会根据计算出的响应值和用户设定的质量等级绘制出角点。最后显示处理后带有标记角点的图像。
cornerEigenValsAndVecs(src_gray, myHarris_dst, blockSize, apertureSize);
cornerMinEigenVal(src_gray, myShiTomasi_dst, blockSize, apertureSize);
if( myShiTomasi_dst.at<float>(i,j) > myShiTomasi_minVal + ( myShiTomasi_maxVal - myShiTomasi_minVal )*myShiTomasi_qualityLevel/max_qualityLevel )
{
circle( myShiTomasi_copy, Point(j,i), 4, Scalar( rng.uniform(0,256), rng.uniform(0,256), rng.uniform(0,256) ), FILLED );
}
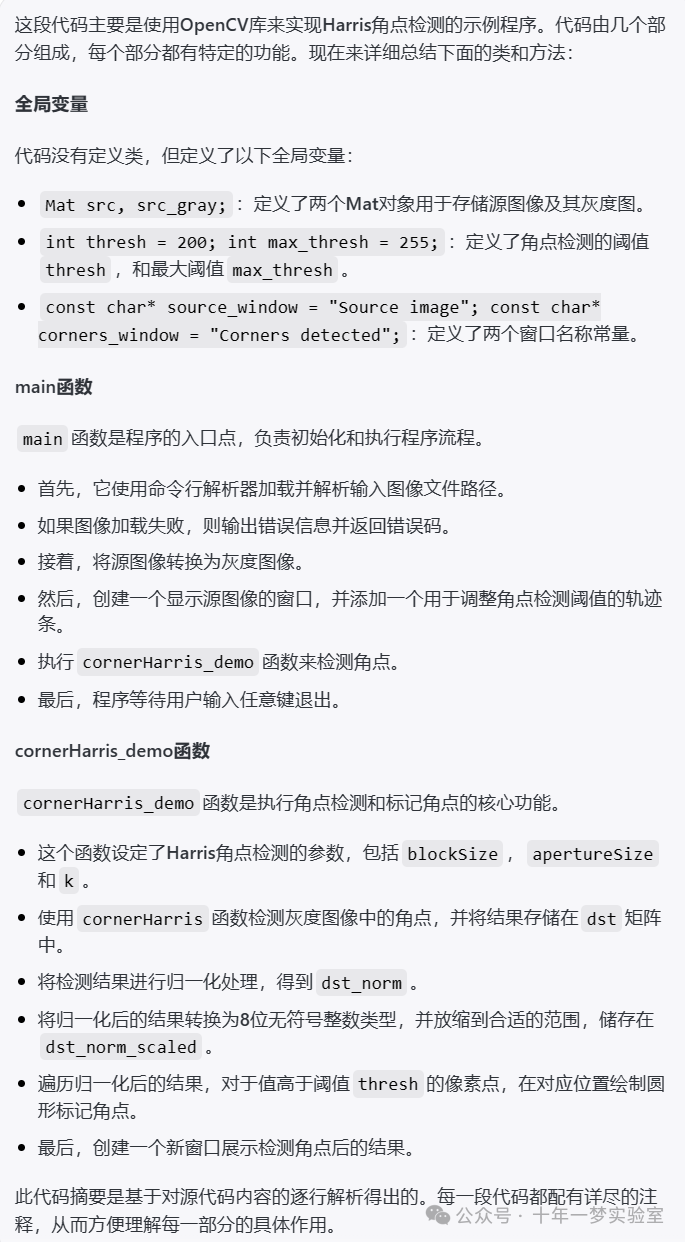
2. cornerHarris_Demo.cpp执行角点检测并在可能的角点周围画一个圆

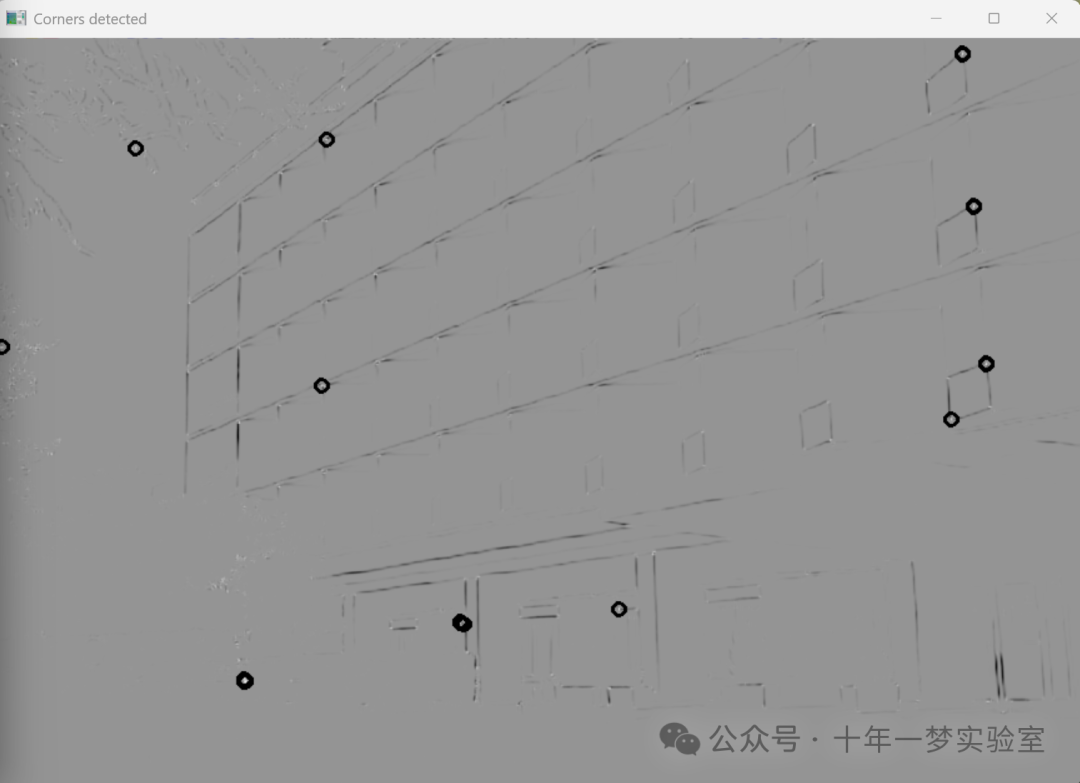
该代码是一个使用Harris-Stephens方法进行角点检测的演示程序。主要实现以下功能:
读取一张图片,并将其转换为灰度图像。
创建一个窗口和一个滑动条以调整Harris角点检测的阈值。
使用Harris-Stephens角点检测算法检测图像角点。
检测到角点后,在图像上绘制圆形以标记这些角点。
在两个窗口中分别显示原始图像和检测到角点后的图像。
/**
* @function cornerHarris_Demo.cpp
* @brief Demo code for detecting corners using Harris-Stephens method
* @author OpenCV team
*/
#include "opencv2/highgui.hpp" // 包含OpenCV图形界面头文件
#include "opencv2/imgproc.hpp" // 包含OpenCV图像处理头文件
#include <iostream> // 包含标准输入输出流头文件
using namespace cv; // 使用cv命名空间,省去cv::前缀
using namespace std; // 使用std命名空间,省去std::前缀
/// Global variables
Mat src, src_gray; // 声明全局变量src和src_gray,存储原始图像和灰度图像
int thresh = 200; // 声明全局变量thresh,定义Harris角点检测阈值
int max_thresh = 255; // 定义最大阈值
const char* source_window = "Source image"; // 窗口名称常量,原图窗口
const char* corners_window = "Corners detected"; // 窗口名称常量,角点检测结果窗口
/// Function header
void cornerHarris_demo( int, void* ); // 声明函数cornerHarris_demo
/**
* @function main
*/
int main( int argc, char** argv )
{
/// Load source image and convert it to gray
CommandLineParser parser( argc, argv, "{@input | building.jpg | input image}" ); // 解析命令行参数
src = imread( samples::findFile( parser.get<String>( "@input" ) ) ); // 读取图像文件
if ( src.empty() )
{
cout << "Could not open or find the image!\n" << endl; // 如果图像为空,输出错误信息
cout << "Usage: " << argv[0] << " <Input image>" << endl; // 提示使用方法
return -1; // 返回错误代码,终止程序
}
cvtColor( src, src_gray, COLOR_BGR2GRAY ); // 将原图像转换为灰度图像
/// Create a window and a trackbar
namedWindow( source_window ); // 创建一个窗口
createTrackbar( "Threshold: ", source_window, &thresh, max_thresh, cornerHarris_demo ); // 创建一个滑动条
imshow( source_window, src ); // 在窗口中显示原图像
cornerHarris_demo( 0, 0 ); // 调用cornerHarris_demo函数,执行角点检测
waitKey(); // 等待按键事件
return 0; // 正常结束程序
}
/**
* @function cornerHarris_demo
* @brief Executes the corner detection and draw a circle around the possible corners
*/
void cornerHarris_demo( int, void* )
{
/// Detector parameters
int blockSize = 2; // 角点检测中块的大小
int apertureSize = 3; // Sobel算子的孔径大小
double k = 0.04; // Harris角点检测方程中的自由参数
/// Detecting corners
Mat dst = Mat::zeros( src.size(), CV_32FC1 ); // 创建一个和原图像同样大小的矩阵,初始值为0
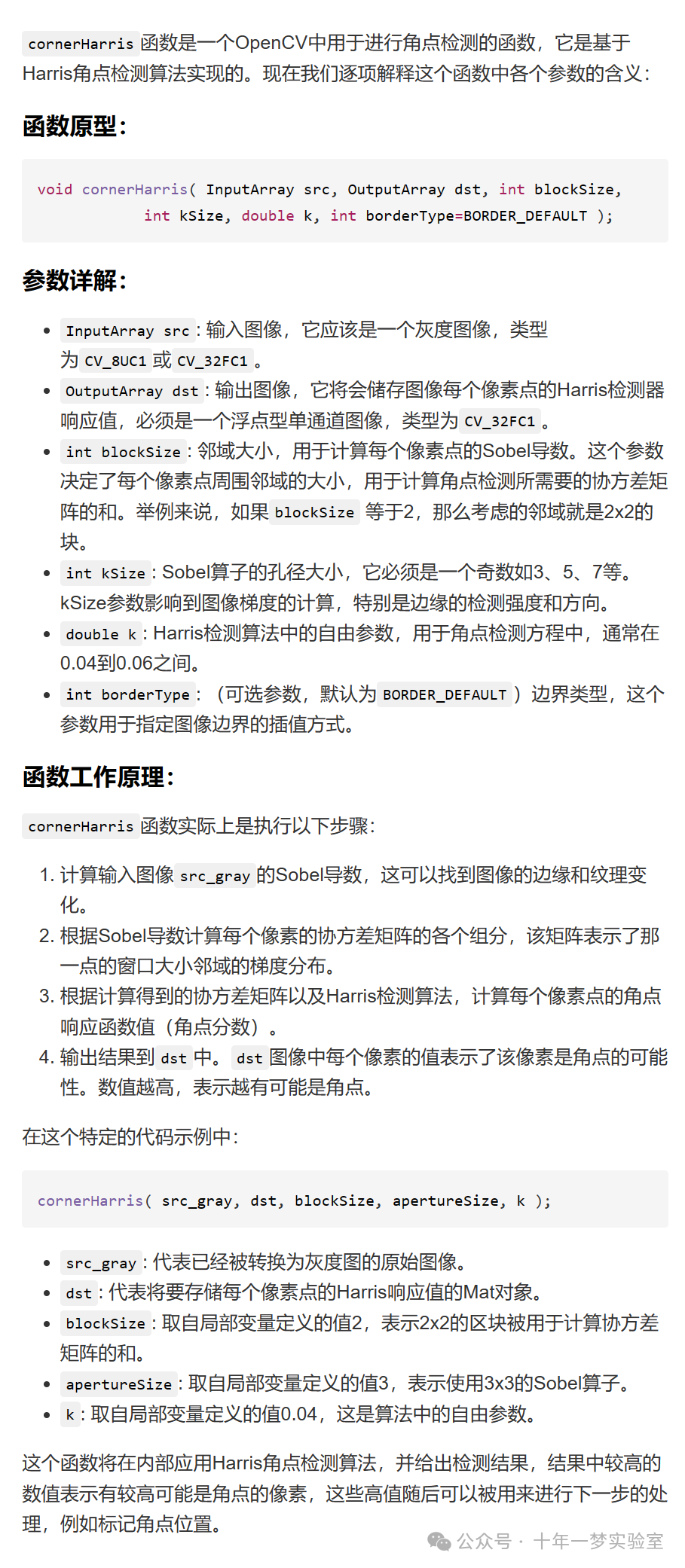
cornerHarris( src_gray, dst, blockSize, apertureSize, k ); // 执行Harris角点检测
/// Normalizing
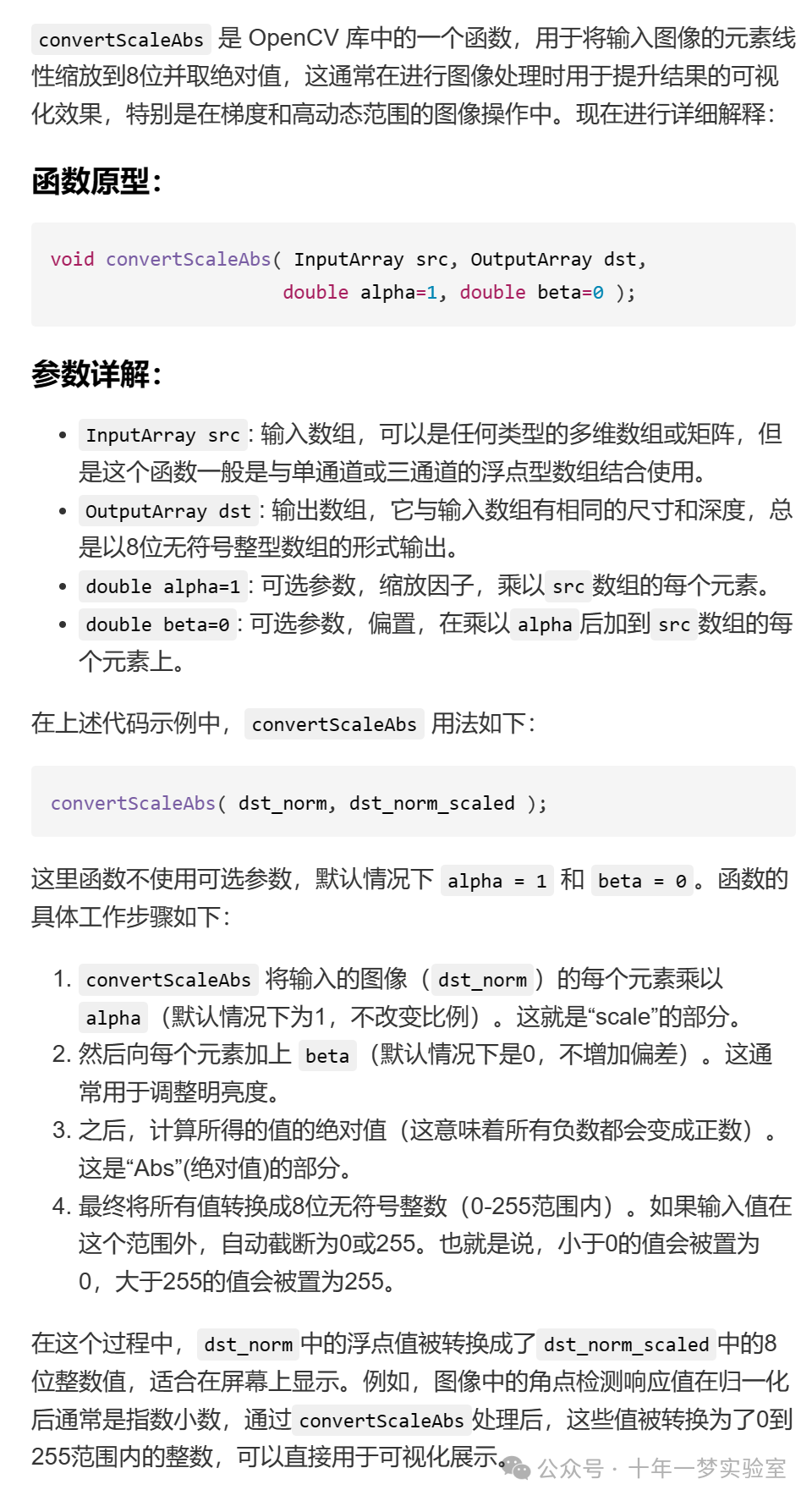
Mat dst_norm, dst_norm_scaled; // 声明两个Mat类型变量,存储正规化后的图像和转换为8位的图像
normalize( dst, dst_norm, 0, 255, NORM_MINMAX, CV_32FC1, Mat() ); // 正规化处理
convertScaleAbs( dst_norm, dst_norm_scaled ); // 将正规化后的图像转换为8位
/// Drawing a circle around corners
for( int i = 0; i < dst_norm.rows ; i++ )
{
for( int j = 0; j < dst_norm.cols; j++ )
{
if( (int) dst_norm.at<float>(i,j) > thresh ) // 判断是否为角点
{
circle( dst_norm_scaled, Point(j,i), 5, Scalar(0), 2, 8, 0 ); // 在检测到的角点位置绘制圆圈
}
}
}
/// Showing the result
namedWindow( corners_window ); // 创建一个新窗口以显示结果
imshow( corners_window, dst_norm_scaled ); // 显示结果图像
}
convertScaleAbs( dst_norm, dst_norm_scaled );
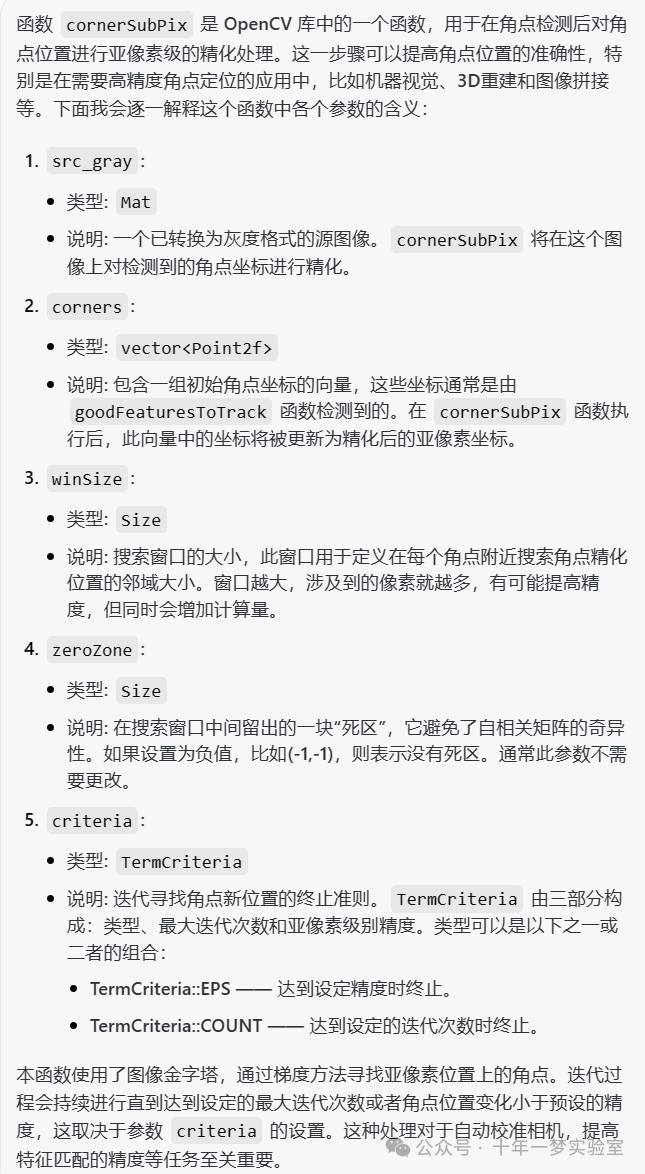
3. cornerSubPix_Demo.cpp对图像中的角点位置进行检测和细化
/**
* @function cornerSubPix_Demo.cpp
* @brief Demo code for refining corner locations
* @author OpenCV team
*/
#include "opencv2/highgui.hpp" // 包含OpenCV图形界面高级操作头文件
#include "opencv2/imgproc.hpp" // 包含OpenCV图像处理头文件
#include <iostream> // 包含标准输入输出流头文件
using namespace cv; // 使用命名空间cv,避免每次调用OpenCV函数时都要加cv::前缀
using namespace std; // 使用命名空间std,避免每次调用标准库函数时都要加std::前缀
/// 全局变量定义区域
Mat src, src_gray; // 定义源图像和灰度图像
int maxCorners = 10; // 最大角点数量初始化为10
int maxTrackbar = 25; // 轨迹条的最大值为25
RNG rng(12345); // 随机数生成器,种子为12345
const char* source_window = "Image"; // 显示窗口的名称
/// 函数头声明
void goodFeaturesToTrack_Demo( int, void* );
/**
* @function main
*/
int main( int argc, char** argv )
{
/// 读取源图像并转换成灰度图像
CommandLineParser parser( argc, argv, "{@input | pic3.png | input image}" ); // 解析命令行参数
src = imread( samples::findFile( parser.get<String>( "@input" ) ) ); // 读取图片文件
if( src.empty() ) // 如果读取失败,则输出错误信息并返回-1
{
cout << "Could not open or find the image!\n" << endl;
cout << "Usage: " << argv[0] << " <Input image>" << endl;
return -1;
}
cvtColor( src, src_gray, COLOR_BGR2GRAY ); // 把源图像转换为灰度图像
/// 创建窗口
namedWindow( source_window );
/// 创建轨迹条以设置角点数量
createTrackbar( "Max corners:", source_window, &maxCorners, maxTrackbar, goodFeaturesToTrack_Demo );
imshow( source_window, src ); // 显示源图像
goodFeaturesToTrack_Demo( 0, 0 ); // 调用角点检测函数
waitKey(); // 等待键盘事件
return 0;
}
/**
* @function goodFeaturesToTrack_Demo.cpp
* @brief Apply Shi-Tomasi corner detector
*/
void goodFeaturesToTrack_Demo( int, void* )
{
/// Shi-Tomasi算法的参数设定
maxCorners = MAX(maxCorners, 1); // 确保角点的数量至少为1
vector<Point2f> corners; // 角点集合
double qualityLevel = 0.01; // 角点检测可接受的最小特征值
double minDistance = 10; // 角点之间的最小距离
int blockSize = 3, gradientSize = 3; // 块大小和梯度大小
bool useHarrisDetector = false; // 是否使用哈里斯角点检测器
double k = 0.04; // 哈里斯角点检测器的自由参数
/// 复制源图像
Mat copy = src.clone();
/// 应用角点检测
goodFeaturesToTrack( src_gray,
corners,
maxCorners,
qualityLevel,
minDistance,
Mat(),
blockSize,
gradientSize,
useHarrisDetector,
k );
/// 绘制检测到的角点
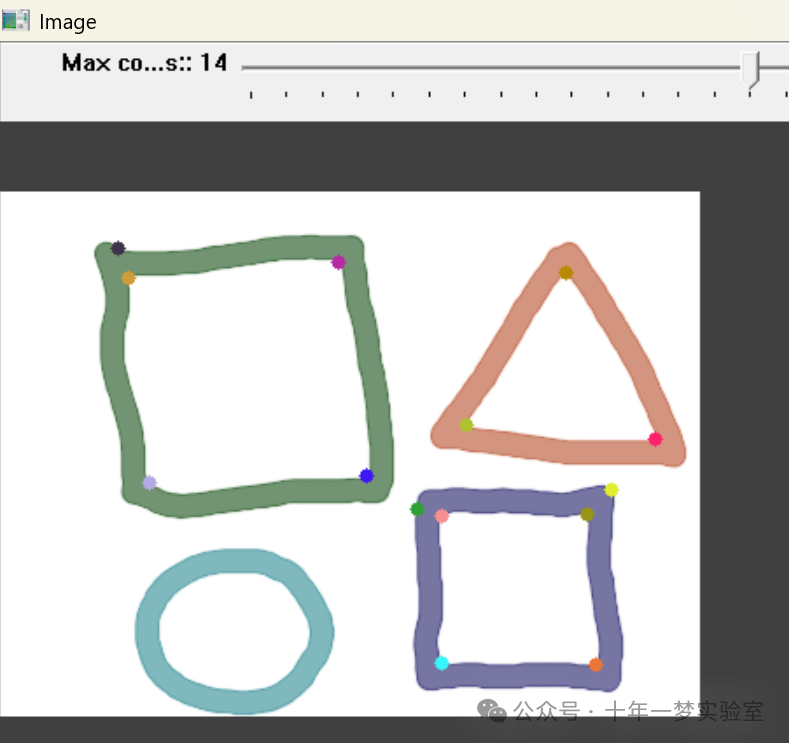
cout << "** Number of corners detected: " << corners.size() << endl;
int radius = 4; // 绘制的圆形角点的半径
for( size_t i = 0; i < corners.size(); i++ ) // 遍历所有检测到的角点
{
// 绘制圆形角点,颜色随机
circle( copy, corners[i], radius, Scalar(rng.uniform(0,255), rng.uniform(0, 256), rng.uniform(0, 256)), FILLED );
}
/// 显示结果
namedWindow( source_window );
imshow( source_window, copy ); // 显示含有角点的图像
/// 设置细化角点所需的参数
Size winSize = Size( 5, 5 ); // 搜索窗口的大小
Size zeroZone = Size( -1, -1 ); // 死区的大小
TermCriteria criteria = TermCriteria( TermCriteria::EPS + TermCriteria::COUNT, 40, 0.001 ); // 终止迭代的条件
/// 计算细化后的角点位置
cornerSubPix( src_gray, corners, winSize, zeroZone, criteria );
/// 输出细化后的角点位置
for( size_t i = 0; i < corners.size(); i++ ) // 遍历细化后的角点集
{
// 打印每个细化后的角点坐标
cout << " -- Refined Corner [" << i << "] (" << corners[i].x << "," << corners[i].y << ")" << endl;
}
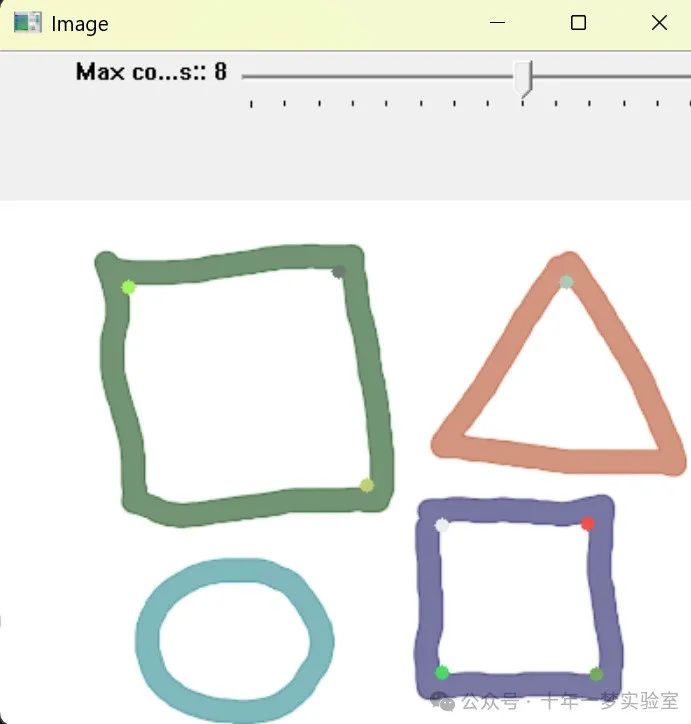
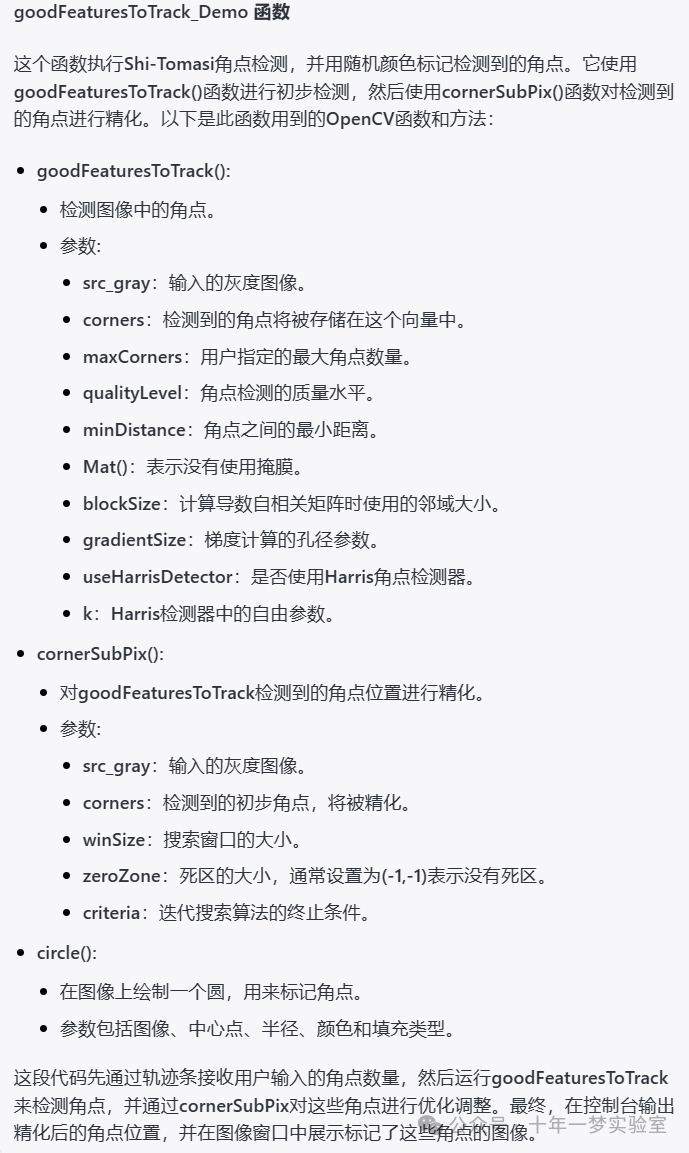
}该代码是OpenCV的一个演示程序,用于展示如何对图像中的角点位置进行检测和细化。代码首先读取图像并转换成灰度图像,然后创建一个窗口并添加一个轨迹条来设置角点的最大数量。通过Shi-Tomasi角点检测函数goodFeaturesToTrack来检测图像中的角点。之后,利用cornerSubPix函数对已检测到的角点进行位置细化。结果显示了检测到的角点的数量以及细化后的角点的位置。
cornerSubPix( src_gray, corners, winSize, zeroZone, criteria );
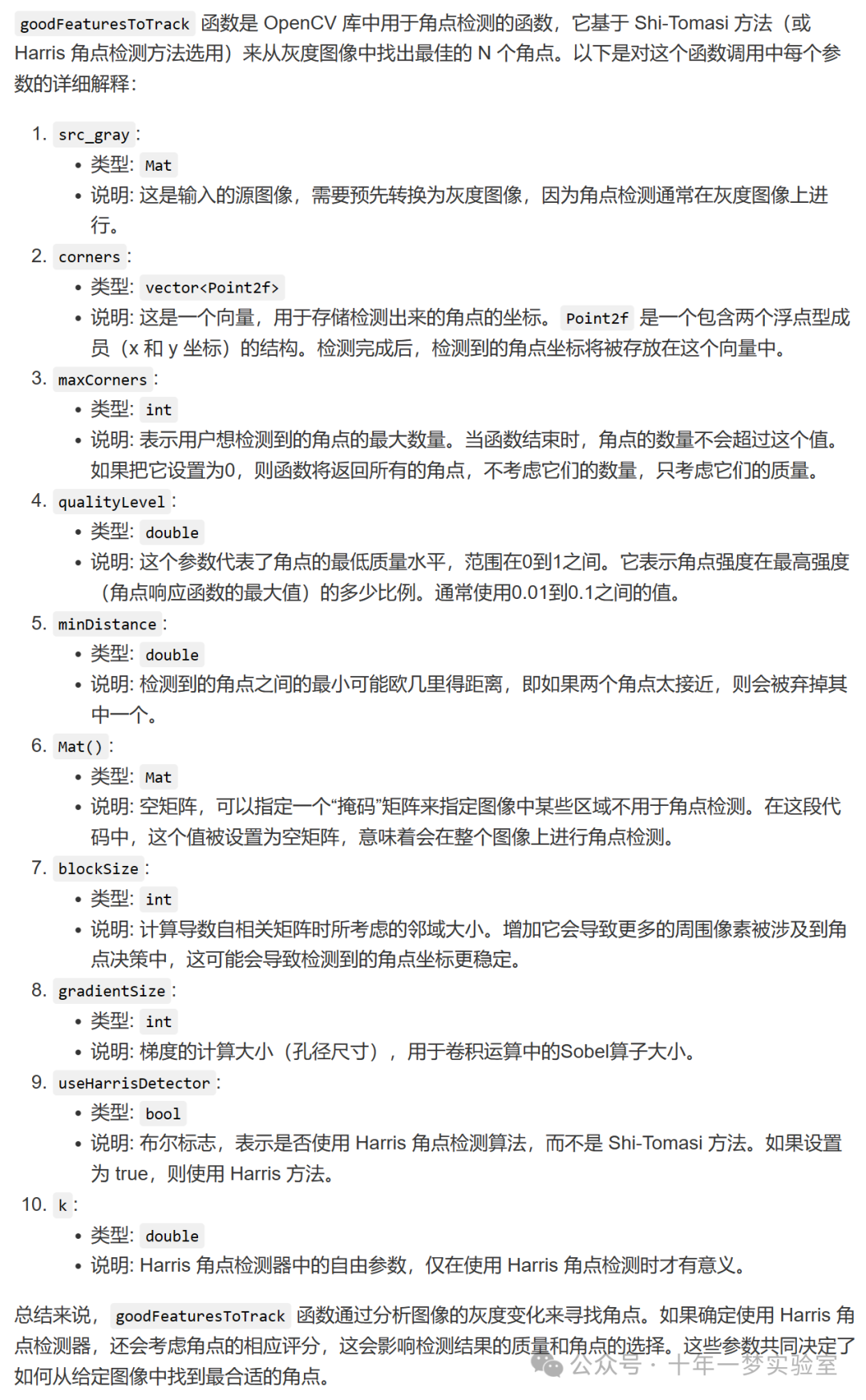
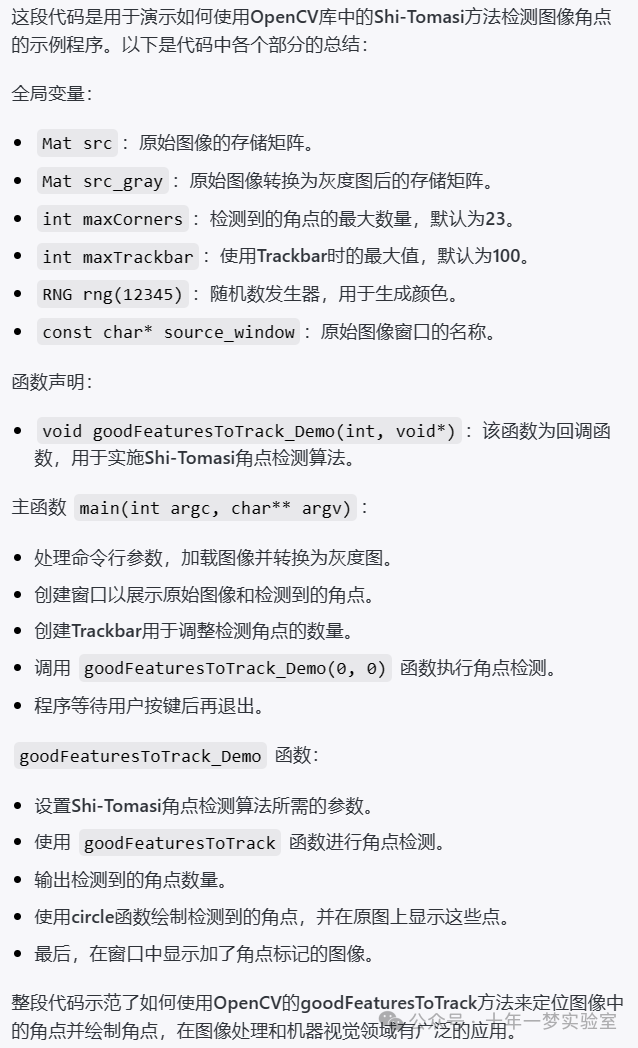
4. goodFeaturesToTrack_Demo.cpp Shi-Tomasi方法检测图像角点
/**
* @function goodFeaturesToTrack_Demo.cpp
* @brief Demo code for detecting corners using Shi-Tomasi method
* @author OpenCV team
*/
#include "opencv2/imgcodecs.hpp" // 引入OpenCV图像编解码功能库
#include "opencv2/highgui.hpp" // 引入OpenCV的高级GUI功能库
#include "opencv2/imgproc.hpp" // 引入OpenCV图像处理功能库
#include <iostream> // 引入输入输出流库
using namespace cv; // 使用OpenCV命名空间
using namespace std; // 使用标准命名空间
/// Global variables
Mat src, src_gray; // 定义原图像及其灰度图像的全局变量
int maxCorners = 23; // 定义检测到的最大角点数量
int maxTrackbar = 100; // 跟踪条的最大值
RNG rng(12345); // 定义随机数生成器,用于画图时颜色的随机
const char* source_window = "Image"; // 定义用于显示图像的窗口名
/// Function header
void goodFeaturesToTrack_Demo( int, void* ); // 声明检测角点的函数原型
/**
* @function main
*/
int main( int argc, char** argv )
{
/// Load source image and convert it to gray
CommandLineParser parser( argc, argv, "{@input | pic3.png | input image}" ); // 解析命令行参数
src = imread( samples::findFile( parser.get<String>( "@input" ) ) ); // 读取图片文件
if( src.empty() )
{
cout << "Could not open or find the image!\n" << endl; // 如果图片为空,打印错误信息
cout << "Usage: " << argv[0] << " <Input image>" << endl;
return -1;
}
cvtColor( src, src_gray, COLOR_BGR2GRAY ); // 将原图像转换为灰度图像
/// Create Window
namedWindow( source_window ); // 创建一个窗口
/// Create Trackbar to set the number of corners
createTrackbar( "Max corners:", source_window, &maxCorners, maxTrackbar, goodFeaturesToTrack_Demo ); // 创建一个跟踪条以调整角点的最大数量
imshow( source_window, src ); // 显示源图像
goodFeaturesToTrack_Demo( 0, 0 ); // 调用goodFeaturesToTrack_Demo函数
waitKey(); // 等待按键事件
return 0;
}
/**
* @function goodFeaturesToTrack_Demo.cpp
* @brief Apply Shi-Tomasi corner detector
*/
void goodFeaturesToTrack_Demo( int, void* )
{
/// Parameters for Shi-Tomasi algorithm
maxCorners = MAX(maxCorners, 1); // 确保角点数至少为1
vector<Point2f> corners; // 定义角点集合
double qualityLevel = 0.01; // 定义角点检测的质量水平
double minDistance = 10; // 角点之间的最小距离
int blockSize = 3, gradientSize = 3; // 定义块大小和梯度大小
bool useHarrisDetector = false; // 是否使用Harris角点检测器
double k = 0.04; // Harris检测器的自由参数
/// Copy the source image
Mat copy = src.clone(); // 复制源图像
/// Apply corner detection
goodFeaturesToTrack( src_gray, // 输入图像
corners, // 输出角点集合
maxCorners, // 角点的最大数量
qualityLevel, // 角点检测的质量水平
minDistance, // 角点之间的最小距离
Mat(), // 蒙版,为空代表不使用
blockSize, // 块大小
gradientSize, // 梯度大小
useHarrisDetector, // 是否使用Harris检测器
k ); // Harris检测器的参数
/// Draw corners detected
cout << "** Number of corners detected: " << corners.size() << endl; // 打印检测到的角点数量
int radius = 4; // 角点绘制的圆半径
for( size_t i = 0; i < corners.size(); i++ )
{
circle( copy, corners[i], radius, Scalar(rng.uniform(0,255), rng.uniform(0, 256), rng.uniform(0, 256)), FILLED ); // 在图像上绘制检测到的角点
}
/// Show what you got
namedWindow( source_window ); // 创建窗口
imshow( source_window, copy ); // 显示含有角点的图像
}此代码是使用C++语言和OpenCV库编写的角点检测示例程序。它可以加载一个图像文件,将其转换为灰度图,然后使用Shi-Tomasi角点检测方法检测图像中的角点。程序通过一个可调的跟踪条允许用户设置最大角点数,并在图像中显示检测到的角点数量。检测到的角点会以彩色圆圈标出并展示在一个新窗口中。这个示例程序适用于那些想要学习如何使用OpenCV进行基本角点检测的开发者。