Deepracer - 阿里云
- 1. 安装环境
- 2. 预安装脚本
- 3. 从 github 下载 deepracer 代码 并初始化
- 4. 首次运行deepracer
1. 安装环境
推荐本地环境: Ubuntu (如果windowns必要的话,就装双系统,我的台式机就是双系统)
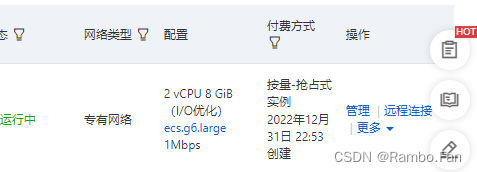
云环境: 阿里云,配置如下,最低配置 2 核 8G 内存,尽可能选择CPU频率高的,抢占式比较便宜,一天5、6块钱,停机的话每天 1块多钱。学生的话应该还有折扣
2. 预安装脚本
通过我多次实验,运行以下脚本可以解决90% 安装时碰到的问题
#!/bin/bash
## setup vim global configure
echo "set number">~/.vimrc
echo "set ts=4 sw=4">>~/.vimrc
## setup crontab configure
echo "#*/3 * * * * /home/rambo/deepracer-for-cloud/keepMonitorSetsid.sh">>/var/spool/cron/crontabs/root
echo "#*/2 * * * * /home/rambo/deepracer-for-cloud/AutoTrainTools.sh">>/var/spool/cron/crontabs/root
echo "#00 00 * * * /home/rambo/tools/HouseKeeping.sh">>/var/spool/cron/crontabs/root
## install docker and required software
curl https://get.docker.com | sh
curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo apt-key add -
sudo add-apt-repository "deb [arch=amd64] https://download.docker.com/linux/ubuntu $(lsb_release -cs) stable"
sudo apt-get update && sudo apt-get install -y --no-install-recommends docker-ce docker-ce-cli containerd.io
sudo apt-get install -y jq awscli python3-pip python3-boto3 docker-compose
## validation required software
apt list --installed>installed.txt
cat installed.txt | grep jq/focal | wc -l>result.txt
cat installed.txt | grep awscli/focal | wc -l>>result.txt
cat installed.txt | grep python3-boto3/focal | wc -l>>result.txt
cat installed.txt | grep docker-compose/focal | wc -l>>result.txt
## setup virtualenv tools workon, use for data analysis
mkdir $HOME/.virtualenvs
pip3 install pbr
pip3 install virtualenv
pip3 install virtualenvwrapper
echo "export WORKON_HOME=$HOME/.virtualenvs">>/etc/profile
echo "export VIRTUALENVWRAPPER_PYTHON=/usr/bin/python3">>/etc/profile
echo "export TOOL_HOME=/home/rambo/tools">>/etc/profile
echo "export DR_HOME=/home/rambo/deepracer-for-cloud">>/etc/profile
source /etc/profile
echo "export WORKON_HOME=$HOME/.virtualenvs">>~/.bashrc
echo "export VIRTUALENVWRAPPER_PYTHON=/usr/bin/python3">>~/.bashrc
echo "export VIRTUALENVWRAPPER_VIRTUALENV=/usr/local/bin/virtualenv">>~/.bashrc
echo "source /usr/local/bin/virtualenvwrapper.sh">>~/.bashrc
source ~/.bashrc
rm -rf installed.txt
## restart system
reboot
3. 从 github 下载 deepracer 代码 并初始化
官方安装教程: Entry>>>
mkdir -p /home/rambo
cd /home/rambo/
git clone https://github.com/aws-deepracer-community/deepracer-for-cloud.git
deepracer
cd deepracer-for-cloud & ./bin/init.sh -c local -a cpu
reboot
4. 首次运行deepracer
4.1 修改activate.sh (云环境需要修改)
修改 localhost 为你的阿里云公网ip,否则无法通过公网访问你的网页,后续将会讲到原理。

4.2 激活环境变量
cd /home/rambo/deepracer-for-cloud & souce bin/activate.sh
4.3 运行训练命令
dr-start-training
如果不出错你应该会看到以下画面
如果你打开多个窗口可以通过docker ps 命令查看当前运行的 docker
可以看到有四个docker正在运行

可以通过docker logs -f <container id>查看 docker 的 输出 log
4.4 docker logs
4.4.1 robomaker
root@rambo:/home/rambo/deepracer-for-cloud# docker ps
CONTAINER ID IMAGE COMMAND CREATED
48069121ac9f awsdeepracercommunity/deepracer-robomaker:5.0.9-cpu-avx2 "/bin/bash -c './run…" 2 hours ago
b542ad455619 awsdeepracercommunity/deepracer-sagemaker:5.0.0-cpu "bash -m start.sh tr…" 2 hours ago
e63a89cbb465 awsdeepracercommunity/deepracer-rlcoach:5.0.6 "/bin/sh -c '(python…" 2 hours ago
1bf87d75aa65 minio/minio:latest "/usr/bin/docker-ent…" 46 hours ago
root@rambo:/home/rambo/deepracer-for-cloud# docker logs -f 48069121ac9f
05/01/2023 13:43:31 passing arg to libvncserver: -rfbport
05/01/2023 13:43:31 passing arg to libvncserver: 5900
05/01/2023 13:43:31 x11vnc version: 0.9.13 lastmod: 2011-08-10 pid: 60
05/01/2023 13:43:31
05/01/2023 13:43:31 wait_for_client: WAIT:0
05/01/2023 13:43:31
05/01/2023 13:43:31 initialize_screen: fb_depth/fb_bpp/fb_Bpl 24/32/2560
05/01/2023 13:43:31
05/01/2023 13:43:31 Listening for VNC connections on TCP port 5900
05/01/2023 13:43:31 Listening for VNC connections on TCP6 port 5900
05/01/2023 13:43:31 listen6: bind: Address already in use
05/01/2023 13:43:31 Not listening on IPv6 interface.
05/01/2023 13:43:31
The VNC desktop is: 48069121ac9f:0
PORT=5900
JWM: warning: /etc/jwm/system.jwmrc[6]: invalid include: /etc/jwm/debian-menu
IP: 10.0.0.85 172.19.0.6 10.0.1.183 (48069121ac9f)
[s3] Successfully downloaded yaml file from s3 key 2022-reinvent-champ-500-10001/training_params.yaml to local
{'ALTERNATE_DRIVING_DIRECTION': 'False', 'AWS_REGION': 'us-east-1', 'BODY_SHELL_TYPE': ['deepracer'], 'CAR_COLOANDOMIZATION': 'False', 'JOB_TYPE': 'TRAINING', 'KINESIS_VIDEO_STREAM_NAME': '', 'METRICS_S3_BUCKET': ['bucket'5', 'MODEL_METADATA_FILE_S3_KEY': ['custom_files/model_metadata.json'], 'NUM_WORKERS': '1', 'RACER_NAME': 'FastJOB_ACCOUNT_ID': 'Dummy', 'ROUND_ROBIN_ADVANCE_DIST': '0.05', 'SAGEMAKER_SHARED_S3_BUCKET': ['bucket'], 'SAGEMA'2022-reinvent-champ-500-10001', 'START_POSITION_OFFSET': '0.0', 'TRAINING_JOB_ARN': 'arn:Dummy', 'WORLD_NAME':
[s3] Successfully downloaded model metadata from s3 key custom_files/model_metadata.json to lo
Sensor list ['FRONT_FACING_CAMERA'], network DEEP_CONVOLUTIONAL_NETWORK_SHALLOW, simapp_version 4.0, training_aclipping_dist': 2.0}
xacro: in-order processing became default in ROS Melodic. You can drop the option.
... logging to /root/.ros/log/f17c5940-8cfe-11ed-9778-02420a000055/roslaunch-48069121ac9f-122.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://48069121ac9f:46839/
SUMMARY
========
PARAMETERS
* /ALTERNATE_DRIVING_DIRECTION: False
* /AWS_REGION: us-east-1
* /BODY_SHELL_TYPE: deepracer
* /CAR_COLOR: Red
* /CAR_NAME: FastCar
* /CHANGE_START_POSITION: True
* /DISPLAY_NAME: FastCar
* /ENABLE_DOMAIN_RANDOMIZATION: False
* /JOB_TYPE: TRAINING
* /KINESIS_VIDEO_STREAM_NAME:
* /METRICS_S3_BUCKET: bucket
* /METRICS_S3_OBJECT_KEY: 2022-reinvent-cha...
* /MIN_EVAL_TRIALS: 5
* /MODEL_METADATA_FILE_S3_KEY: custom_files/mode...
* /NUM_WORKERS: 1
* /RACER_NAME: FastCar
* /RACE_TYPE: TIME_TRIAL
* /REWARD_FILE_S3_KEY: custom_files/rewa...
* /ROBOMAKER_SIMULATION_JOB_ACCOUNT_ID: Dummy
* /ROUND_ROBIN_ADVANCE_DIST: 0.05
* /SAGEMAKER_SHARED_S3_BUCKET: bucket
* /SAGEMAKER_SHARED_S3_PREFIX: 2022-reinvent-cha...
* /SIMTRACE_S3_BUCKET: bucket
* /SIMTRACE_S3_PREFIX: 2022-reinvent-cha...
* /START_POSITION_OFFSET: 0.0
* /TRAINING_JOB_ARN: arn:Dummy
* /WORLD_NAME: 2022_reinvent_champ
* /racecar/joint_state_controller/publish_rate: 60
* /racecar/joint_state_controller/type: joint_state_contr...
* /racecar/left_front_wheel_velocity_controller/joint: left_front_wheel_...
* /racecar/left_front_wheel_velocity_controller/pid/d: 0.0
* /racecar/left_front_wheel_velocity_controller/pid/i: 0.0
* /racecar/left_front_wheel_velocity_controller/pid/i_clamp: 0.0
* /racecar/left_front_wheel_velocity_controller/pid/p: 0.5
* /racecar/left_front_wheel_velocity_controller/type: effort_controller...
* /racecar/left_rear_wheel_velocity_controller/joint: left_rear_wheel_j...
* /racecar/left_rear_wheel_velocity_controller/pid/d: 0.0
* /racecar/left_rear_wheel_velocity_controller/pid/i: 0.0
* /racecar/left_rear_wheel_velocity_controller/pid/i_clamp: 0.0
* /racecar/left_rear_wheel_velocity_controller/pid/p: 1.0
* /racecar/left_rear_wheel_velocity_controller/type: effort_controller...
* /racecar/left_steering_hinge_position_controller/joint: left_steering_hin...
* /racecar/left_steering_hinge_position_controller/pid/d: 0.5
* /racecar/left_steering_hinge_position_controller/pid/i: 0.0
* /racecar/left_steering_hinge_position_controller/pid/p: 1.0
* /racecar/left_steering_hinge_position_controller/type: effort_controller...
* /racecar/right_front_wheel_velocity_controller/joint: right_front_wheel...
* /racecar/right_front_wheel_velocity_controller/pid/d: 0.0
* /racecar/right_front_wheel_velocity_controller/pid/i: 0.0
* /racecar/right_front_wheel_velocity_controller/pid/i_clamp: 0.0
* /racecar/right_front_wheel_velocity_controller/pid/p: 0.5
* /racecar/right_front_wheel_velocity_controller/type: effort_controller...
* /racecar/right_rear_wheel_velocity_controller/joint: right_rear_wheel_...
* /racecar/right_rear_wheel_velocity_controller/pid/d: 0.0
* /racecar/right_rear_wheel_velocity_controller/pid/i: 0.0
* /racecar/right_rear_wheel_velocity_controller/pid/i_clamp: 0.0
* /racecar/right_rear_wheel_velocity_controller/pid/p: 1.0
* /racecar/right_rear_wheel_velocity_controller/type: effort_controller...
* /racecar/right_steering_hinge_position_controller/joint: right_steering_hi...
* /racecar/right_steering_hinge_position_controller/pid/d: 0.5
* /racecar/right_steering_hinge_position_controller/pid/i: 0.0
* /racecar/right_steering_hinge_position_controller/pid/p: 1.0
* /racecar/right_steering_hinge_position_controller/type: effort_controller...
* /racecar/robot_description: <?xml version="1....
* /rosdistro: melodic
* /rosversion: 1.14.13
* /use_sim_time: True
NODES
/
agent (deepracer_simulation_environment/run_rollout_rl_agent.sh)
agents_video_editor (deepracer_simulation_environment/agents_video_editor.py)
car_reset_node (deepracer_simulation_environ[INFO] [1672926220.612822, 0.000000]: Loading model XML from ro
[INFO] [1672926220.630882, 0.000000]: Waiting for service /gazebo/spawn_urdf_model
[INFO] [1672926224.558686, 0.000000]: Calling service /gazebo/spawn_urdf_model
[INFO] [1672926225.029959, 0.000000]: Spawn status: SpawnModel: Successfully spawned entity
[CameraManager]: Added <markov.cameras.handlers.follow_car_camera.FollowCarCamera object at 0x7f0938d517b8> to
[CameraManager]: Added <markov.cameras.handlers.top_camera.TopCamera object at 0x7f0938d51ac8> to camera_namesp
[CameraManager]: Removed <markov.cameras.handlers.follow_car_camera.FollowCarCamera object at 0x7f0938d517b8> f
[CameraManager]: Removed <markov.cameras.handlers.top_camera.TopCamera object at 0x7f0938d51ac8> from camera_na
Pausing physics after initializing the cars
Publishing to KVS stream is enabled: True
[ INFO] [1672926222.564217814]: DeepRacerGazeboSystemPlugin: Load
[ INFO] [1672926222.568071699]: DeepRacerGazeboSystemPlugin: Finished loading.
[ INFO] [1672926222.611815967]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1672926222.621880266]: waitForService: Service [/gazebo/set_physics_properties] has not been advertise
[ INFO] [1672926224.470260328]: DeepRacerGazeboSystemPlugin: Init Complete
[ INFO] [1672926224.540085966]: waitForService: Service [/gazebo/set_physics_properties] is now available.
[ INFO] [1672926225.043333738, 0.001000000]: Physics dynamic reconfigure ready.
[ INFO] [1672926227.771968223, 0.001000000]: Camera Plugin: Using the 'robotNamespace' param: '/racecar/'
[ INFO] [1672926227.802620536, 0.001000000]: Camera Plugin (ns = /racecar/) <tf_prefix_>, set to "/racecar"
[ INFO] [1672926228.103771083, 0.001000000]: Loading gazebo_ros_control plugin
[ INFO] [1672926228.103919460, 0.001000000]: Starting gazebo_ros_control plugin in namespace: /racecar
[ INFO] [1672926228.105292331, 0.001000000]: gazebo_ros_control plugin is waiting for model URDF in parameter [
[ INFO] [1672926228.295442727, 0.001000000]: Loaded gazebo_ros_control.
Topic [2022_reinvent_champ//racecar/main_camera/camera_link/camera_sensor/image] is not valid.
Spawning sub camera model
Warning [parser.cc:950] XML Element[projection_type], child of element[camera] not defined in SDF. Ignoring[pro
Topic [2022_reinvent_champ//sub_camera/camera_link/camera_sensor/image] is not valid.
+ export PYTHONUNBUFFERED=1
+ PYTHONUNBUFFERED=1
+ ROLLOUT_IDX=0
+ python3 -m markov.rollout_worker --rollout_idx 0
/usr/local/lib/python3.6/dist-packages/tensorflow/python/framework/dtypes.py:523: FutureWarning: Passing (type, (1,)) / '(1,)type'.
_np_qint8 = np.dtype([("qint8", np.int8, 1)])
/usr/local/lib/python3.6/dist-packages/tensorflow/python/framework/dtypes.py:524: FutureWarning: Passing (type, (1,)) / '(1,)type'.
_np_quint8 = np.dtype([("quint8", np.uint8, 1)])
/usr/local/lib/python3.6/dist-packages/tensorflow/python/framework/dtypes.py:525: FutureWarning: Passing (type, (1,)) / '(1,)type'.
_np_qint16 = np.dtype([("qint16", np.int16, 1)])
/usr/local/lib/python3.6/dist-packages/tensorflow/python/framework/dtypes.py:526: FutureWarning: Passing (type, (1,)) / '(1,)type'.
_np_quint16 = np.dtype([("quint16", np.uint16, 1)])
/usr/local/lib/python3.6/dist-packages/tensorflow/python/framework/dtypes.py:527: FutureWarning: Passing (type, (1,)) / '(1,)type'.
_np_qint32 = np.dtype([("qint32", np.int32, 1)])
/usr/local/lib/python3.6/dist-packages/tensorflow/python/framework/dtypes.py:532: FutureWarning: Passing (type, (1,)) / '(1,)type'.
np_resource = np.dtype([("resource", np.ubyte, 1)])
S3 bucket: bucket
S3 prefix: 2022-reinvent-champ-500-10001
S3 endpoint URL: http://minio:9000
[s3] Successfully downloaded reward function from s3 key custom_files/reward_function.py to local
Succeed to import user's reward function
[CameraManager]: Added <markov.cameras.handlers.follow_car_camera.FollowCarCamera object at 0x7fa7cd833f28> to
[CameraManager]: Added <markov.cameras.handlers.top_camera.TopCamera object at 0x7fa7f6c6e7f0> to camera_namesp
[s3] Successfully downloaded model metadata from s3 key custom_files/model_metadata.json to lo
Sensor list ['FRONT_FACING_CAMERA'], network DEEP_CONVOLUTIONAL_NETWORK_SHALLOW, simapp_version 4.0, training_aclipping_dist': 2.0}
Action space from file: {'steering_angle': {'high': 30, 'low': -28}, 'speed': {'high': 0.6, 'low': 0.45}}
[s3] Successfully downloaded ip config from s3 key 2022-reinvent-champ-500-10001/ip/ip.json to
[s3] Successfully downloaded hyperparameters from s3 key 2022-reinvent-champ-500-10001/ip/
Using the following hyper-parameters
{
"batch_size": 512,
"beta_entropy": 0.01,
"discount_factor": 0.995,
"e_greedy_value": 0.05,
"epsilon_steps": 20000,
"exploration_type": "categorical",
"loss_type": "huber",
"lr": 0.0007,
"num_episodes_between_training": 20,
"num_epochs": 10,
"stack_size": 1,
"term_cond_avg_score": 350.0,
"term_cond_max_episodes": 100
}
Exception when checking for DEEPRACER_JOB_TYPE_ENV 'LOCAL' is not a valid DeepRacerJobType
[s3] Successfully downloaded 11_Step-0.ckpt.data-00000-of-00001 from s3 key 2022-reinvent-cham00-of-00001.
[s3] Successfully downloaded 11_Step-0.ckpt.index from s3 key 2022-reinvent-champ-500-10001/mo
[s3] Successfully downloaded 11_Step-0.ckpt.meta from s3 key 2022-reinvent-champ-500-10001/mod
[s3] Successfully downloaded .ready from s3 key 2022-reinvent-champ-500-10001/model/.ready to
[s3] Successfully downloaded .ready from s3 key 2022-reinvent-champ-500-10001/model/.ready to
## Creating graph - name: MultiAgentGraphManager
## Start physics before creating graph
## Create graph
## Creating agent - name: agent
[RL] Created agent loggers
[RL] Dynamic import of memory: "DeepRacerMemoryParameters" {
"load_memory_from_file_path": null,
"max_size": [
"<MemoryGranularity.Transitions: 0>",
1000000
],
"n_step": -1,
"shared_memory": false,
"train_to_eval_ratio": 1
}
[RL] Dynamically imported of memory <markov.memories.deepracer_memory.DeepRacerMemory object at 0x7fa7b60dc0b8>
[RL] Setting devices
[RL] Setting filters
[RL] Setting filter devices: numpy
[RL] Setting Phase
[RL] After setting Phase
[RL] Setting signals
[RL] Agent init successful
[RL] ActorCriticAgent init
[RL] ActorCriticAgent init successful
## Created agent: agent
WARNING:tensorflow:From /usr/local/lib/python3.6/dist-packages/rl_coach/architectures/tensorflow_components/heais deprecated and will be removed after 2018-10-01.
Instructions for updating:
The TensorFlow Distributions library has moved to TensorFlow Probability (https://github.com/tensorflow/probabi
WARNING:tensorflow:From /usr/local/lib/python3.6/dist-packages/tensorflow/contrib/distributions/python/ops/mvn_ear_operator) is deprecated and will be removed after 2018-10-01.
Instructions for updating:
The TensorFlow Distributions library has moved to TensorFlow Probability (https://github.com/tensorflow/probabi
WARNING:tensorflow:From /usr/local/lib/python3.6/dist-packages/tensorflow/contrib/distributions/python/ops/mvn_s.affine_linear_operator) is deprecated and will be removed after 2018-10-01.
Instructions for updating:
The TensorFlow Distributions library has moved to TensorFlow Probability (https://github.com/tensorflow/probabi
WARNING:tensorflow:From /usr/local/lib/python3.6/dist-packages/tensorflow/contrib/distributions/python/ops/bijeps.shape) is deprecated and will be removed after 2018-10-01.
Instructions for updating:
The TensorFlow Distributions library has moved to TensorFlow Probability (https://github.com/tensorflow/probabi
WARNING:tensorflow:From /usr/local/lib/python3.6/dist-packages/tensorflow/python/ops/distributions/kullback_lei and will be removed after 2018-10-01.
Instructions for updating:
The TensorFlow Distributions library has moved to TensorFlow Probability (https://github.com/tensorflow/probabi
## Stop physics after creating graph
## Creating session
Creating regular session
2023-01-05 13:47:04.862078: I tensorflow/core/platform/cpu_feature_guard.cc:141] Your CPU supports instructions
Checkpoint> Restoring from path=./checkpoint_robomaker/agent/11_Step-0.ckpt
[BestModelSelection] Number of evaluations: 0 Evaluation episode progress: []
[BestModelSelection] Evaluation episode progress mean: None
[BestModelSelection] current progress mean: None >= best progress mean: None
[BestModelSelection] Updating the best checkpoint to "11_Step-0.ckpt" from "None".
[s3] Successfully uploaded deepracer checkpoint to s3 bucket bucket with s3 key 2022-reinvent-
Reset agent
Reset agent finished
SIM_TRACE_LOG:0,1,0.6158,0.4621,131.5896,27.66,0.46,[27.65998655627193, 0.4616798338555716],0.0000,False,True,0
SIM_TRACE_LOG:0,2,0.6158,0.4621,131.5896,21.14,0.52,[21.14067853826014, 0.5166042275386177],2.3931,False,True,0
SIM_TRACE_LOG:0,3,0.6056,0.4735,131.5931,-13.19,0.45,[-13.187847432881064, 0.45],1.5093,False,True,0.4672,1,33.
SIM_TRACE_LOG:0,4,0.5880,0.4905,132.0661,-28.00,0.45,[-28.0, 0.45],1.2650,False,True,0.5404,1,33.28,41.094,in_p
SIM_TRACE_LOG:0,5,0.5626,0.5220,131.5563,-28.00,0.45,[-28.0, 0.45],1.2418,False,True,0.6619,1,33.28,41.122,in_p
SIM_TRACE_LOG:0,6,0.5435,0.5480,130.8447,9.26,0.60,[9.262538080108165, 0.6],1.3703,False,True,0.7586,1,33.28,41
SIM_TRACE_LOG:0,7,0.5219,0.5786,129.9631,-28.00,0.53,[-28.0, 0.5252708917652322],1.2659,False,True,0.8703,1,33.
SIM_TRACE_LOG:0,8,0.5049,0.6051,129.0315,-0.70,0.58,[-0.703149143717372, 0.5771569178762861],1.3685,False,True,
SIM_TRACE_LOG:0,9,0.4824,0.6412,127.8357,-10.29,0.54,[-10.293000863545661, 0.5435133701797971],1.2274,False,Tru
SIM_TRACE_LOG:0,10,0.4546,0.6817,127.2120,-2.63,0.57,[-2.6338082251363026, 0.5733328031123175],1.3223,False,Tru
SIM_TRACE_LOG:0,11,0.4348,0.7155,126.2717,6.37,0.45,[6.37402493151906, 0.45],1.0733,False,True,1.3517,1,33.28,4
SIM_TRACE_LOG:0,12,0.4163,0.7451,125.6576,-0.44,0.49,[-0.4385930093844479, 0.4908977934204706],1.1142,False,Tru
SIM_TRACE_LOG:0,13,0.3901,0.7823,125.5697,-1.35,0.60,[-1.347394179495339, 0.6],1.1989,False,True,1.5912,2,33.28
SIM_TRACE_LOG:0,14,0.3724,0.8122,124.9235,26.23,0.56,[26.230439516247735, 0.5551959401381897],1.0295,False,True
SIM_TRACE_LOG:0,15,0.3515,0.8471,124.2475,30.00,0.52,[30.0, 0.5174350748940163],0.9228,False,True,1.8138,2,33.2
SIM_TRACE_LOG:0,16,0.3274,0.8775,124.9200,-17.13,0.55,[-17.125384797321388, 0.5535192436416749],1.0397,False,Tr
SIM_TRACE_LOG:0,17,0.2993,0.9118,125.7336,1.14,0.56,[1.1449007759598118, 0.5607351860641396],1.0988,False,True,
SIM_TRACE_LOG:0,18,0.2730,0.9422,126.5963,-0.50,0.45,[-0.4953503664246064, 0.45],1.0006,False,True,2.1836,2,33.
SIM_TRACE_LOG:0,19,0.2480,0.9699,127.4286,30.00,0.58,[30.0, 0.5797080501925032],1.0702,False,True,2.2958,3,33.2
SIM_TRACE_LOG:0,20,0.2151,1.0048,128.5977,0.45,0.60,[0.4529574714912208, 0.6],1.1618,False,True,2.4398,3,33.28,
SIM_TRACE_LOG:0,21,0.1910,1.0306,129.2067,-6.07,0.60,[-6.066883165367543, 0.6],1.1018,False,True,2.5459,3,33.28
SIM_TRACE_LOG:0,22,0.1565,1.0688,129.8061,-17.64,0.59,[-17.642144782139102, 0.5928320834766536],1.0955,False,Tr
SIM_TRACE_LOG:0,23,0.1314,1.1005,129.5828,-6.43,0.53,[-6.427786939049003, 0.530889381728802],1.0962,False,True,
SIM_TRACE_LOG:0,24,0.1058,1.1323,129.4580,-28.00,0.59,[-28.0, 0.592360831607806],1.1375,False,True,2.9423,3,33.
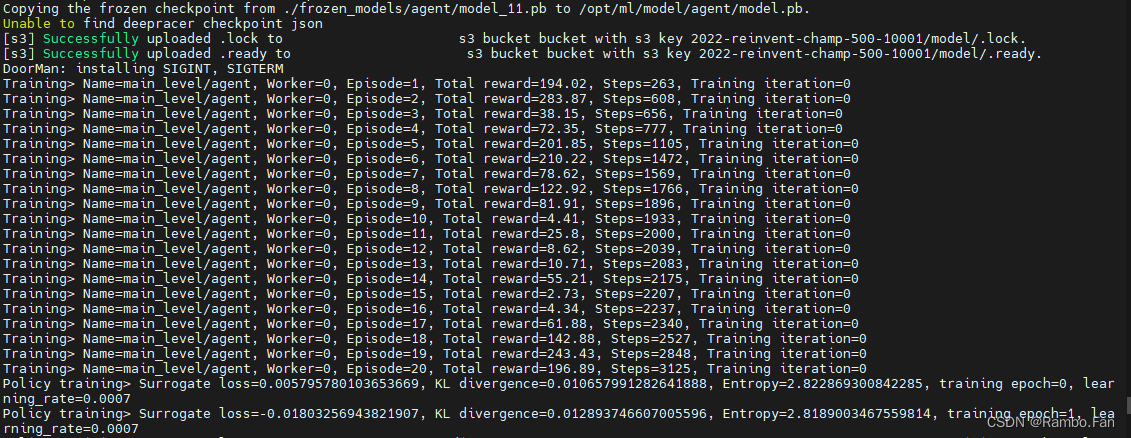
可以看到 robomaker docker 里面是 agent 每一步的详细数据
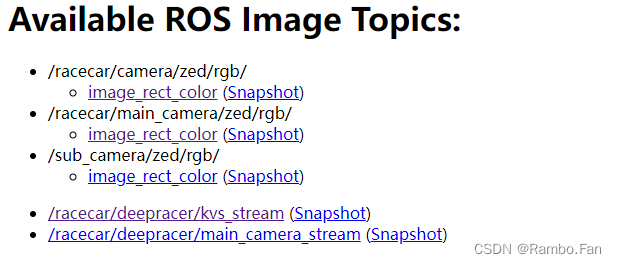
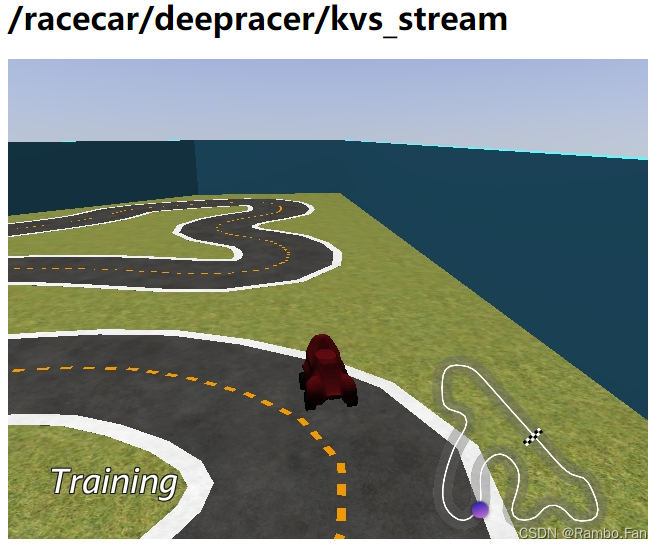
此时可以通过网页 8080 端口在线实时查看运行状态
http://ip:8080
4.4.2 sagemaker
sagemaker 是对每一个回合的数据汇总
4.4.3 rlcoach
rlcoach 是对agent每20回合之后进行的数据训练
4.5 停止训练
停止训练的命令
dr-stop-training
停止后查看docker ps,此时只剩 minio 一个实例
4.6 评估模型
评估模型的命令
dr-start-evaluation
此时可以通过8180 端口网页实时查看agent 运行状态
4.7 停止评估模型
命令, 运行该命令后评估结束,此时又只剩下minio docker
dr-stop-evaluation
4.8 迭代模型
命令,运行该命令后,模型名称最后面的数字+1
dr-increment-training
4.9 更新参数
修改/home/rambo/deepracer-for-cloud/custom_files 里面的奖励函数,速度值等,需要将其更新到环境中,命令如下
dr-upload-custom-files
懂得了这些基本命令就可以入门本地训练了,当然想要在本地玩好 deepracer 还有很多命令技巧和组合,已经自动化训练,数据分析,模型优化等,但懂得了本文的这些基本内容,入门已经足够了。